1. Introduction
The use of advanced space propulsion systems, which are able to give a steerable thrust vector, whose magnitude can be selected within a prescribed range during the flight, allows robotic spacecraft to cover complex, non-Keplerian, space trajectories and to complete scientific missions that would be difficult using more common chemical thrusters, both in planetocentric and heliocentric contexts [
1,
2,
3,
4,
5]. Among the continuous-thrust propulsion systems proposed or actually used in recent decades, such as the well-known photonic solar sails [
6,
7,
8] or the more exotic electric solar wind sails [
9,
10,
11,
12], solar electric thrusters actually occupy a prominent position thanks to the maturity reached by this specific important technology [
13,
14,
15]. This maturity has allowed its operational use as a primary propulsion system, even in challenging interplanetary scenarios, since NASA’s mission Deep Space 1 launched almost thirty years ago [
16,
17,
18,
19]. In addition, the continuous and throttleable propulsive acceleration vector provided by a solar electric thruster has also been proposed for the de-orbiting of small satellites [
20,
21], or for achieving an optimal reconfiguration and maintenance of complex spacecraft formation structures [
22,
23,
24].
Technological advances in the miniaturization of both spacecraft components [
25] and scientific payloads [
26,
27] have recently enabled the installation of a continuous-thrust propulsion system on board a CubeSat [
28], such as a medium-sized photonic solar sail [
29,
30,
31] or a miniaturized solar electric thruster [
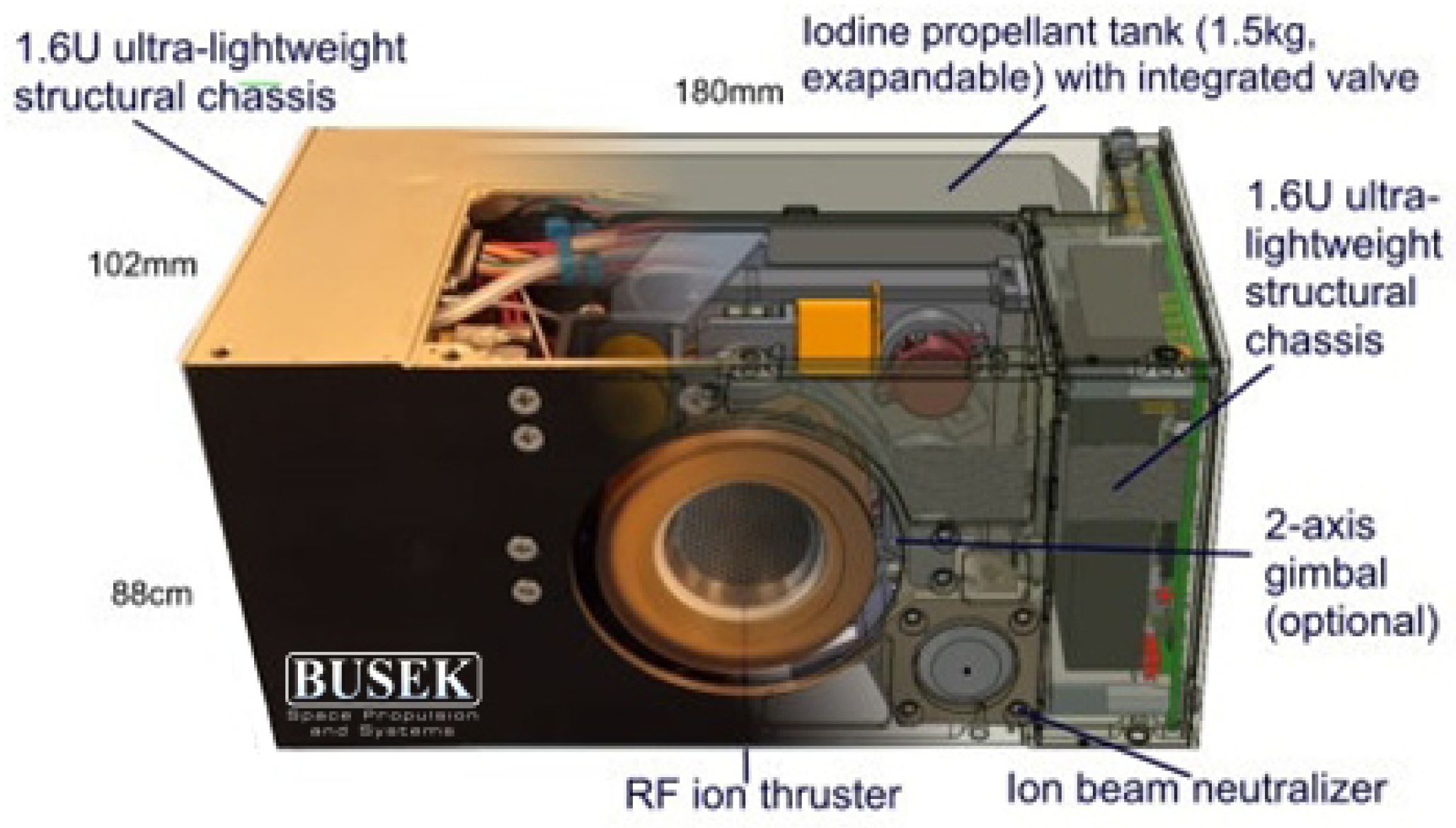
32]. In this context, the Busek’s BIT-3 RF ion thruster (Busek Co. Inc., Natick, MA, USA) represents an interesting, efficient, and compact iodine gridded engine that allows us to achieve a maximum thrust magnitude of about 1.1 mN, with a specific impulse of 2150 s and a rather small occupied volume of 1.6 U [
33]. A cutaway of the BIT-3 engine unit, which also houses a propellant tank with 1.5 kg of solid iodine, is shown in
Figure 1. In this figure, one can observe the presence of a two-axis gimbal system that allows the (possibly) small spacecraft’s reaction wheels to be desaturated. The technology readiness level achieved by this type of miniaturized RF ion thruster [
34,
35,
36] allowed its operational use in two scientific space missions launched by NASA a few years ago, that is, the Lunar Polar Hydrogen Mapper (LunaH-Map) [
37] and the Lunar IceCube [
38,
39], which were designed to perform remote sensing of the lunar surface using two (small) 6 U CubeSats whose launch mass was 14 kg.
In the recent literature, the performance of a CubeSat equipped with a propulsion system based on the BIT-3 thruster technology has been studied considering a simplified mathematical model in which the thrust magnitude has a fixed value during the flight [
40] or varies continuously within a prescribed range [
41] as a function of the available input power given by a solar array-based subsystem [
42]. However, the operating levels and the performance characteristics of a BIT-3 engine unit, in terms of specific impulse and the electric power required for the system to function, are finite in number, according to the typical thrust table of the electric thruster which can be retrieved from the recent works of Tsay et al. [
43,
44]. In particular, as detailed in
Section 2, according to Ref. [
44], the thrust table of the BIT-3 RF ion engine has five distinct operating levels to which a sixth is added that, although technically a thrust command, can be considered a sort of fictitious thrust level, as it produces almost zero thrust while consuming a small amount of propellant. This additional fictitious operating level is inserted into the actual thrust table to model a BIT-3 operating condition in which the engine unit is essentially in a sort of idle mode that, however, allows it to reach normal thrust conditions without going through the entire ignition sequence [
44]. The BIT-3 engine unit also has two other operating modes, in addition to the one called “thrust mode” (TM) [
43,
44]. In fact, it is possible to insert the engine unit into a so-called “sleep mode” (SM) in which the electric power absorbed is the minimum (a value of about 3.2 W, which is required for communication), while the TM is preceded by a “warm standby mode” (WSM), which absorbs an electric power up to a maximum of 30 W (with a value of about 20 W to maintain the mode), which serves to prepare the propulsion system to provide the required operating level indicated in the actual thrust table.
The aim of this paper is to study the space trajectory and the guidance laws of a classical CubeSat equipped with a BIT-3 RF ion thruster as primary propulsion system, taking into account the actual (few) operating levels that can be provided by such an electric engine according to its thrust table [
44]. In this context, as discussed in
Section 3, this paper considers a typical heliocentric mission scenario in which a BIT-3-propelled interplanetary CubeSat transfers between two assigned Keplerian orbits [
45]. In particular, analyzing the orbital transfer problem in an optimization framework, this paper discusses the optimal guidance laws of the BIT-3-propelled small spacecraft as a function of the available electric power obtained through a high-performance solar panel-based subsystem [
42]. In this context, an indirect approach [
46,
47,
48] is used to design the CubeSat’s transfer trajectory towards asteroid 2000 SG344, while the Pontryagin’s Maximum Principle (PMP) [
49] is employed to obtain the optimal control law in terms of both the thrust vector direction and the operating level selection. The numerical results of the simulations are illustrated in
Section 4, which also contains a parametric study of the optimal transfer performance as a function of the CubeSat’s reference electric power. Finally,
Section 5 contains the concluding remarks.
2. BIT-3 Thrust Model for Preliminary Mission Analysis
In this section, the thrust model of a BIT-3 engine unit is analyzed assuming a TM and considering the admissible operating levels given in the engine’s thrust table. To this end, the mathematical model considers the thruster data indicated in Ref. [
44], which gives the BIT-3 performances in terms of thrust magnitude
T, the Power Processing Unit (PPU) input power
P, the specific impulse
, and the screen grid current
C. In particular, Tsay [
44] indicates the value of the set
for six possible operating levels (the generic operating level is indicated by the symbol
), as reported in
Table 1, which coincides with the engine unit’s thrust table in this work.
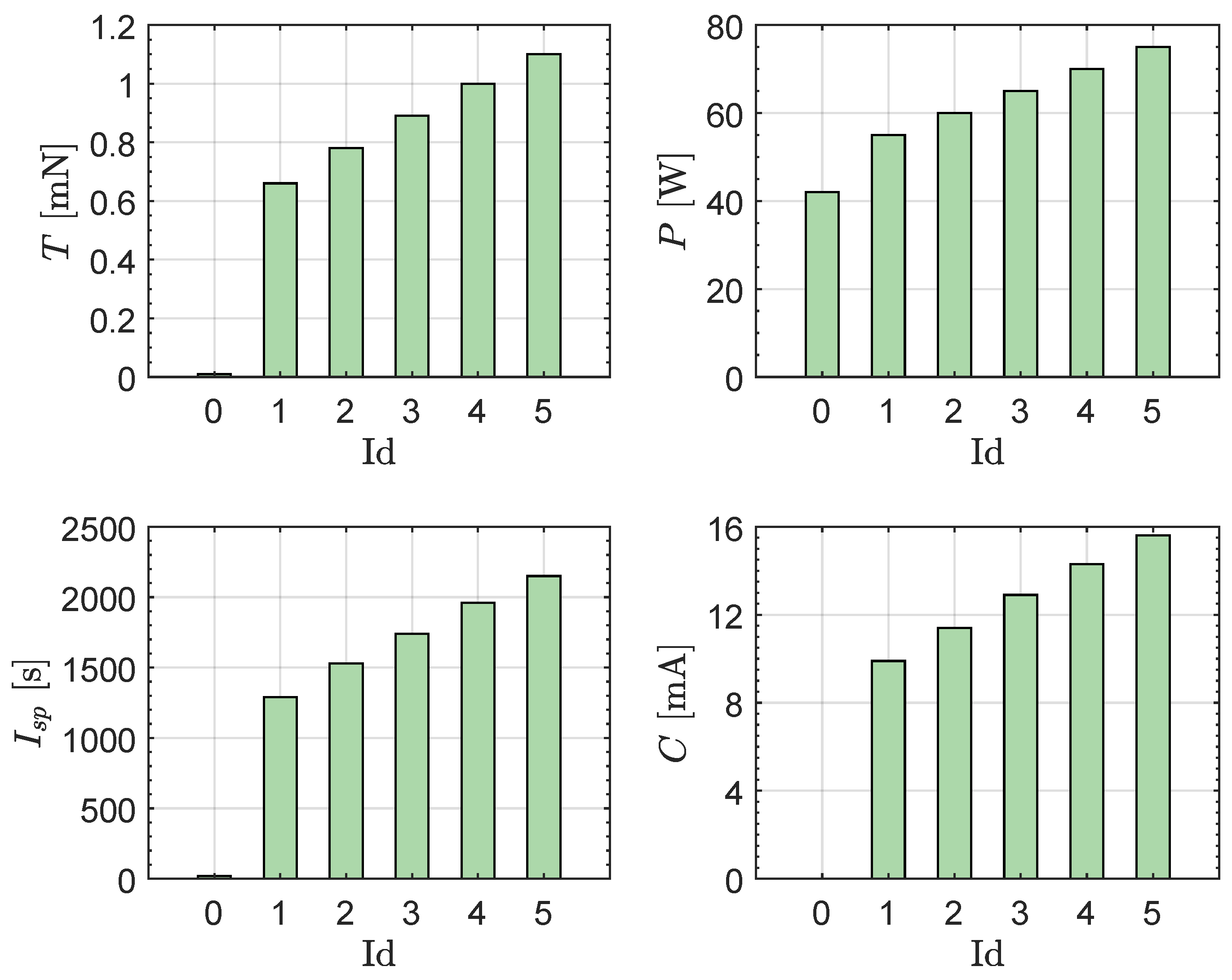
Figure 2 shows the bar plot of the BIT-3 performance characteristics
as a function of the operating level
.
From
Table 1 or
Figure 1, it can be observed that the operating level
substantially corresponds to a zero-thrust condition in which the electric power required for the operation of the solar electric thruster is nevertheless non-zero, amounting to 42 W. Furthermore, the value of the specific impulse
relative to the operating level
is non-zero, even though it is extremely small (the value is in fact just 20 s). This non-zero value of
indicates, as explicitly observed by Tsay [
44], that there is propellant consumption and electric power waste even in the condition of
, which gives in fact practically zero thrust. In accordance with what was discussed in the Introduction Section,
indicates the so-called fictitious level which models the zero-thrust condition, and which is in addition to the five effective operating levels
which provide an effective condition where the BIT-3 engine unit provides appreciable thrust.
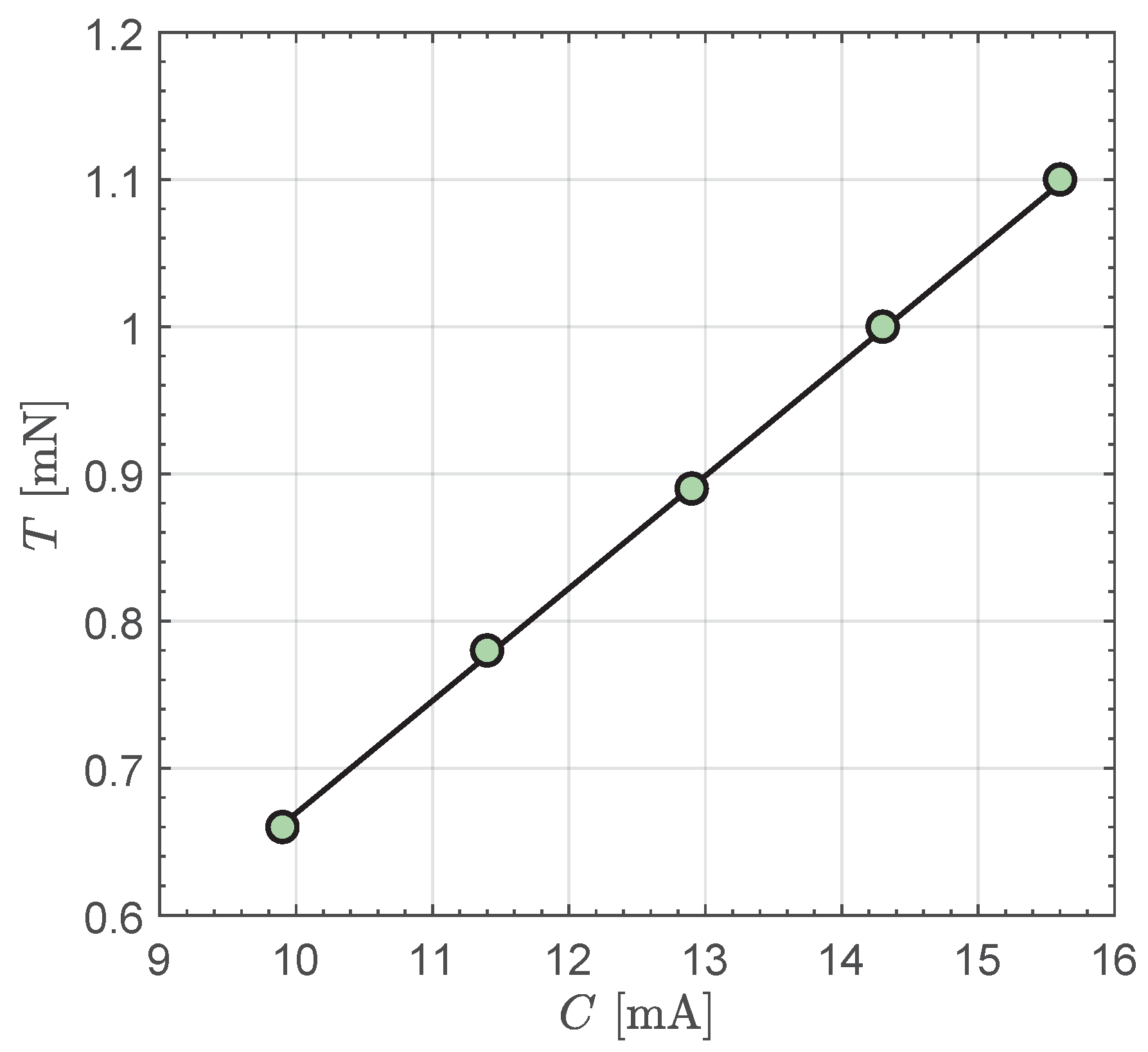
The last column of
Table 1 summarizes the screen grid current
C required by each operating level. In particular, the thrust magnitude
T exhibits a nearly linear variation with the screen grid current. In fact, as suggested in Ref. [
44], the function
when
can be accurately approximated by the following linear equation:
where
C is milliampere and
T is in millinewton.
The linear relation in the preceding equation, which is shown in
Figure 3, can be used to express in simple analytical form the amount of thrust as a function of
C, so that the screen grid current can be considered as a sort of (continuous) scalar control variable that can be used to select the other performance parameters of the BIT-3 engine unit during the flight. In this work, instead, the chosen control variable corresponds to the operating level
, which provides through
Table 1 the effective values of the performance parameters of the electric propulsion system. It is therefore a discrete dimensionless control variable, which clearly involves a complication in the definition of the control law during a generic orbital transfer, since the thrust magnitude and the mass consumption of the small spacecraft do not have, in general, a continuous variation in time, as will be discussed later in the paper.
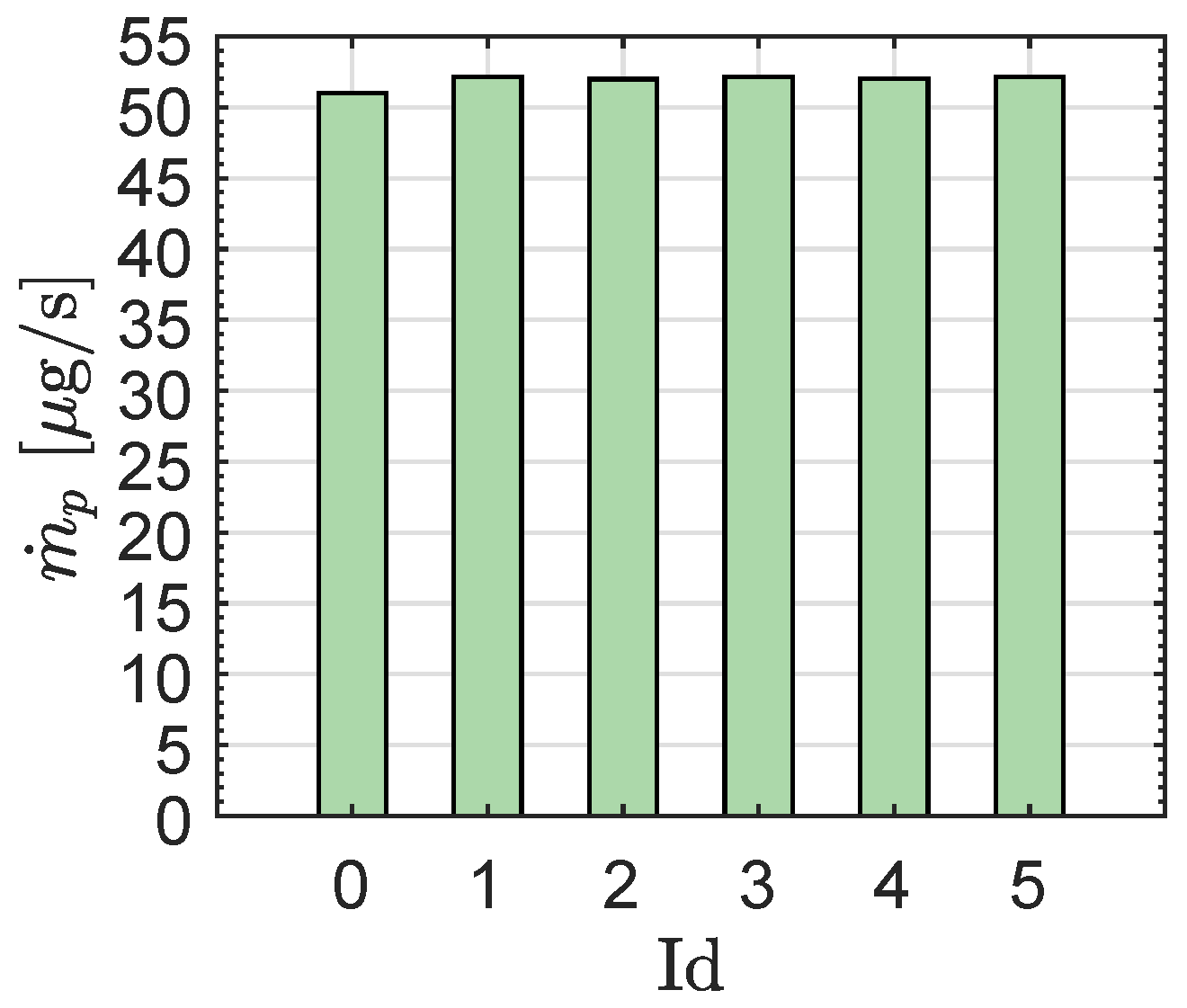
The propellant mass flow rate
which gives, apart from the sign, the temporal variation of the spacecraft total mass
m, can be determined as a function of the control variable
using the data summarized in
Table 1. In this context, indicating with
the standard gravity and using the following (well-known) equation
one obtains the results summarized in
Table 2 and
Figure 4, which indicate that the propellant mass flow rate has a value substantially independent of the specific operating level selected.
From the trajectory design point of view, the performance parameters of the propulsion system to be considered are essentially the thrust magnitude
T, which defines the propulsive acceleration value, and the propellant mass flow rate
, on which the instantaneous mass of the spacecraft depends. In missions with a power generation system based on solar panels and a heliocentric scenario—where the available electric power depends on the distance of the spacecraft from the Sun (which is generally variable during the flight)—an additional constraint must be considered: the value of the absorbed electric power,
P. This is because the ability to activate a generic operating level depends on the available power. Consequently, a reduced (and slightly modified) version of the actual thrust table will be used in the remainder of the paper. More precisely,
Table 3 summarizes the main thrust parameters
used in the design of the spacecraft trajectory and in the numerical simulations illustrated in
Section 4, as a function of the control parameter
.
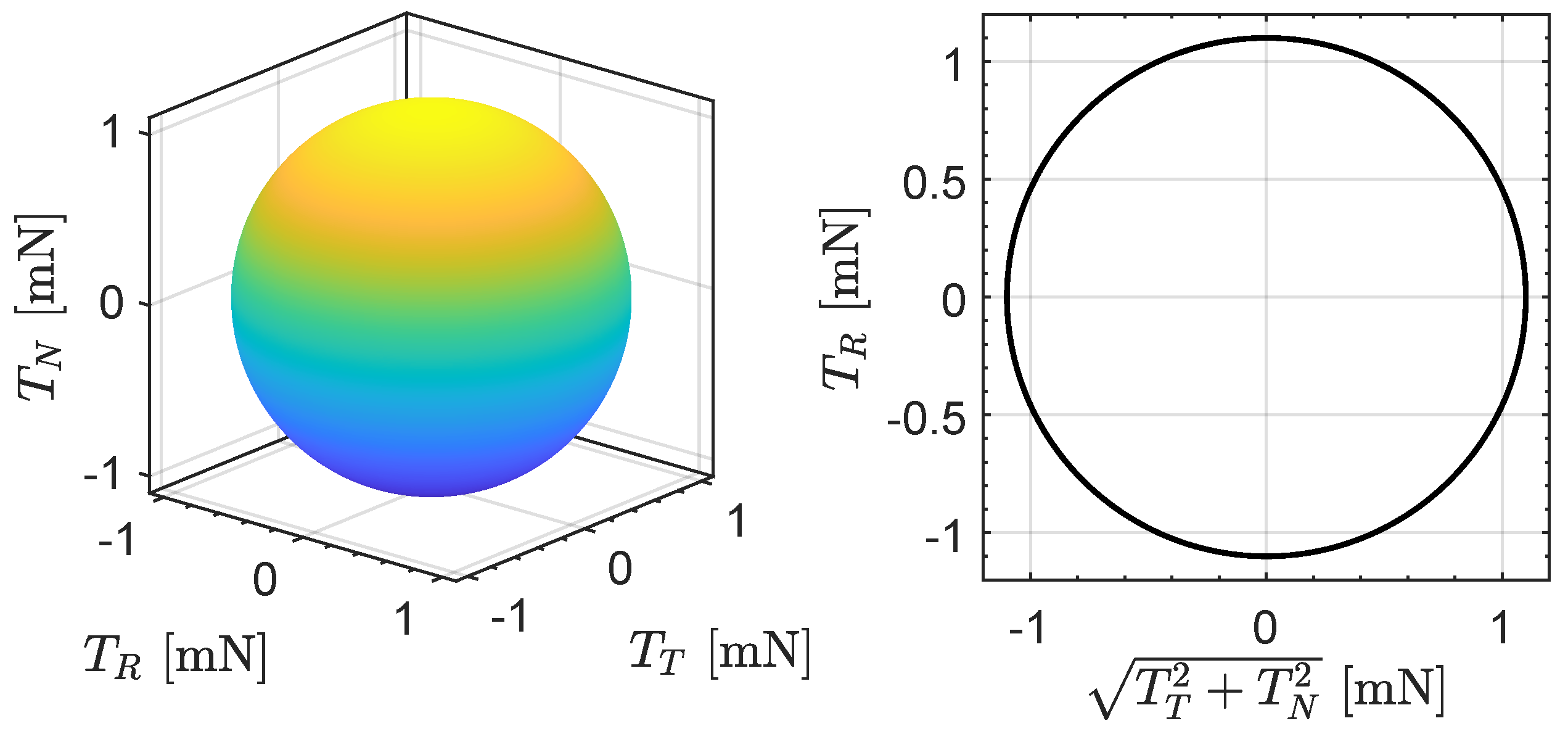
As regards the direction of the thrust vector, which is defined by the unit vector
, the usual working hypothesis used in the design of space trajectories based on the use of solar electric propulsion systems is adopted. In particular, it is assumed that the unit vector
is not constrained and that, therefore, the direction of the BIT-3-induced thrust vector
can be oriented in any direction during the flight of the spacecraft. Therefore, the thrust vector can be simply written as
where value of the thrust magnitude
is indicated in
Table 3 as a function of the operating level
. From the point of view of spacecraft dynamics, usually the thrust vector
is more conveniently expressed in a typical radial–transverse–normal reference frame (RTN) whose unit vectors are defined, as a function of the spacecraft position
and velocity
vector, as
,
,
. In RTN, the thrust vector is rewritten as
where
,
, and
are the radial, transverse, and normal components of the thrust vector, respectively, with
. In the case where the vector
is not constrained, for a given operating level
, the tip of the thrust vector describes a sphere in the RTN frame.
Figure 5 shows such a kind of thrust bubble in the case where the BIT-3 engine unit provides the maximum value of
T, that is, in the case of
.
Finally, the thrust model needed to describe the dynamics of the spacecraft includes the differential equation for the total mass variation. Assuming for simplicity that during the flight, the propulsion system is always in TM (i.e., we do not consider the possibility of engaging the SM or the WSM), and taking into account the propellant mass flow rate
given in
Table 3, the equation indicating the temporal variation of
m is simply the following:
where, again, the value of
depends on the selected operating level
.
Case of Two Engine Units
In this part of the section, we will analyze the case where the CubeSat hosts two identical engine units which are both based on the BIT-3 RF ion thruster (with gimbal) [
33]. The total propellant mass stored on board the spacecraft is therefore
, the mass of the combined propulsion system is
, and the total occupied volume is
. The interesting case where there are three engine units can be easily modeled by extending the procedure outlined below, while a scenario with four units appears difficult to reconcile with the typical dimensions and weights of CubeSats designed today for scientific applications [
50]. In this situation, let us indicate with the subscript ➀ the first of these two identical BIT-3-based engine units, and with the subscript ➁ the remaining unit, so that the symbol
(or
) indicates the thrust level of the first (or the second) engine unit. Let us also assume that each of the two engine units is independent and that therefore its operating level can be selected independently from that of the other unit. This means, among other things, that the electric power input to the PPU of the generic unit can be selected autonomously during the flight.
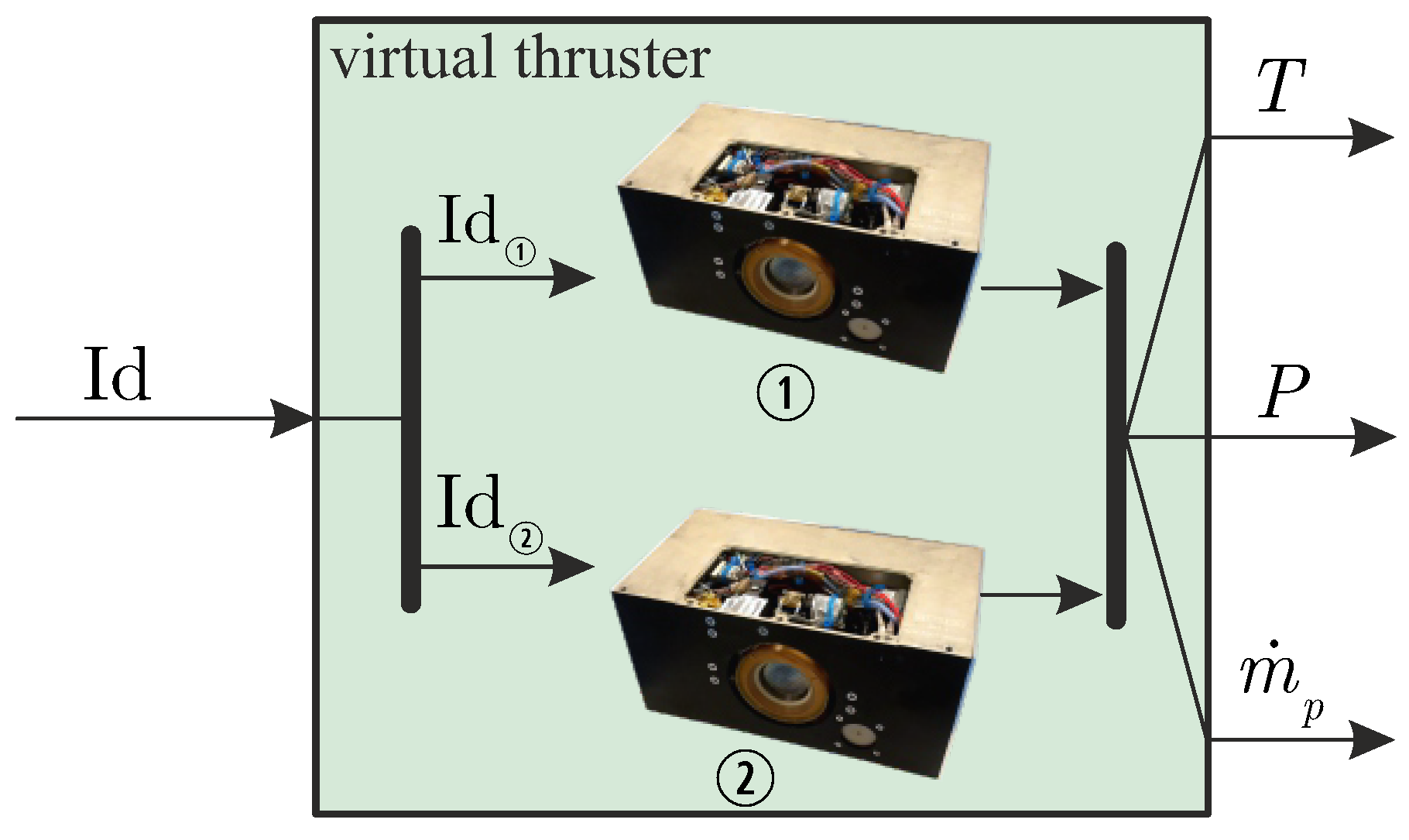
From the point of view of the preliminary design of the spacecraft transfer trajectory, an important aspect to take into account regarding the effect linked to the presence of two engine units is the possibility of having a certain number of different combinations of total thrust magnitude
T and total propellant mass flow rate
, which obviously correspond to different absorbed (total) electric power levels
P. More precisely, in the presence of two independent BIT-3-based engine units, from the point of view of the study of spacecraft dynamics, it is more convenient to consider a sort of virtual propulsion system whose characteristics, in terms of
, depend on the values chosen for
and
, as sketched in
Figure 6.
The operating level
of such a virtual propulsion system is indicated, as a function of the values of
and
, in
Table 4. For example, according to
Table 4, the operating level
is obtained when
and
, so that in this case, bearing in mind the data in
Table 3, the total thrust given by the virtual propulsion system is
, the total propellant mass flow rate is
, and the total absorbed electric power is
. On the other hand, the operating level
corresponds to a case in which
and
. Accordingly, when
, the total thrust of the virtual engine is
, the total propellant mass flow rate is
, and the required electric power is
.
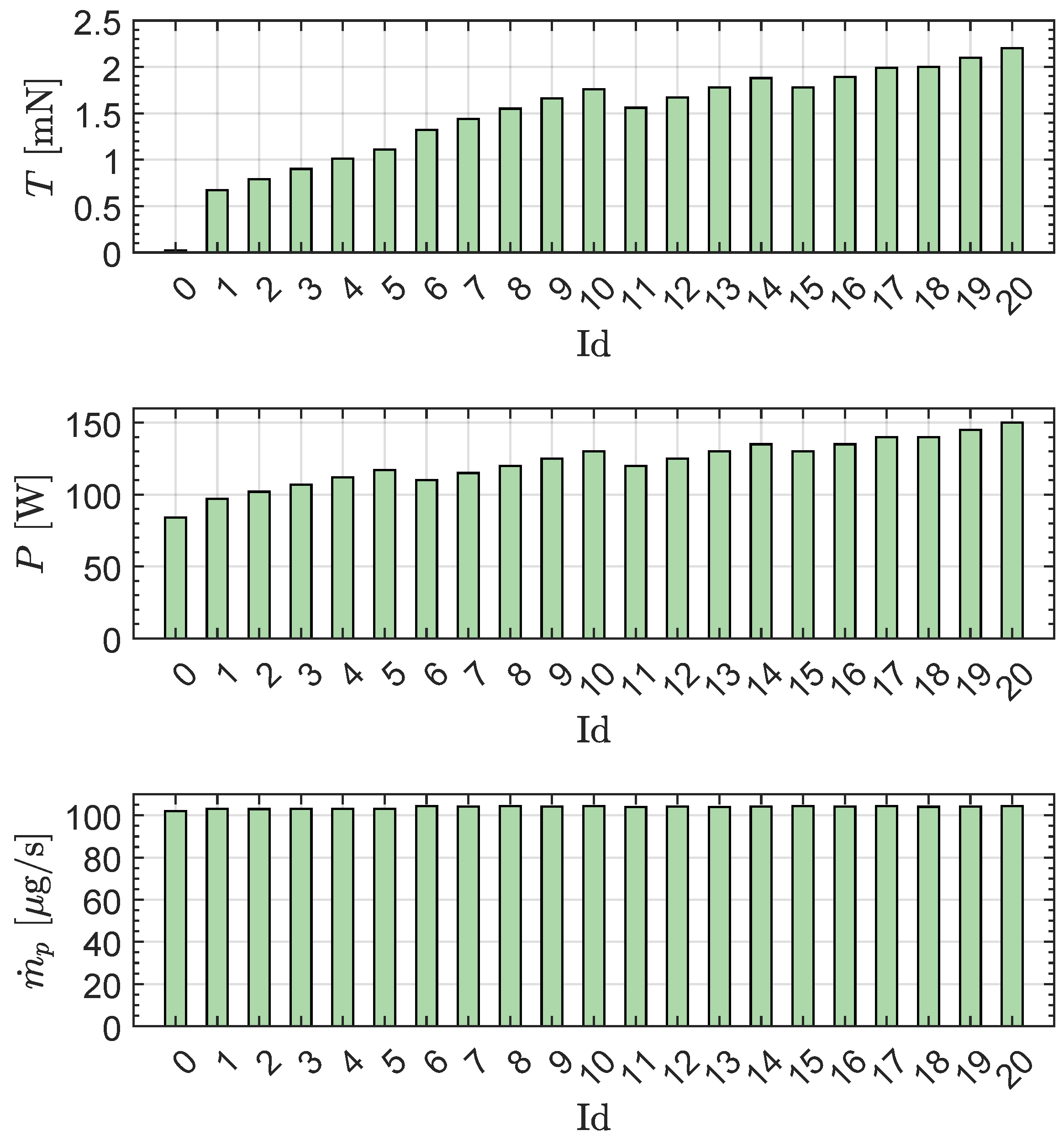
According to the possible combinations of
and
summarized in
Table 4, and bearing in mind the data reported in
Table 3, one obtains the propulsive performances
as a function of the operating level
shown in the bar plots of
Figure 7. In particular, the figure indicates that the propellant mass flow rate of the propulsion system is roughly
for all the values of
. The values of
for each of the 21 operating levels indicated in
Table 4 are also reported in
Table 5.
4. Mission Description and Simulation Results
The performance of the BIT-3-propelled CubeSat is studied in an interplanetary mission scenario that includes reaching a near-Earth asteroid. In this context, the heliocentric orbit of object 2000 SG344 was considered, which corresponds to an Aten-class asteroid with a size of just under forty meters. This asteroid has been considered several times in the literature as a possible target for exploration by robotic probes [
58,
59]. The orbital elements which define the shape and the orientation of the target heliocentric orbit, as obtained by the JPL Horizons On-Line Ephemeris System, are summarized in
Table 6.
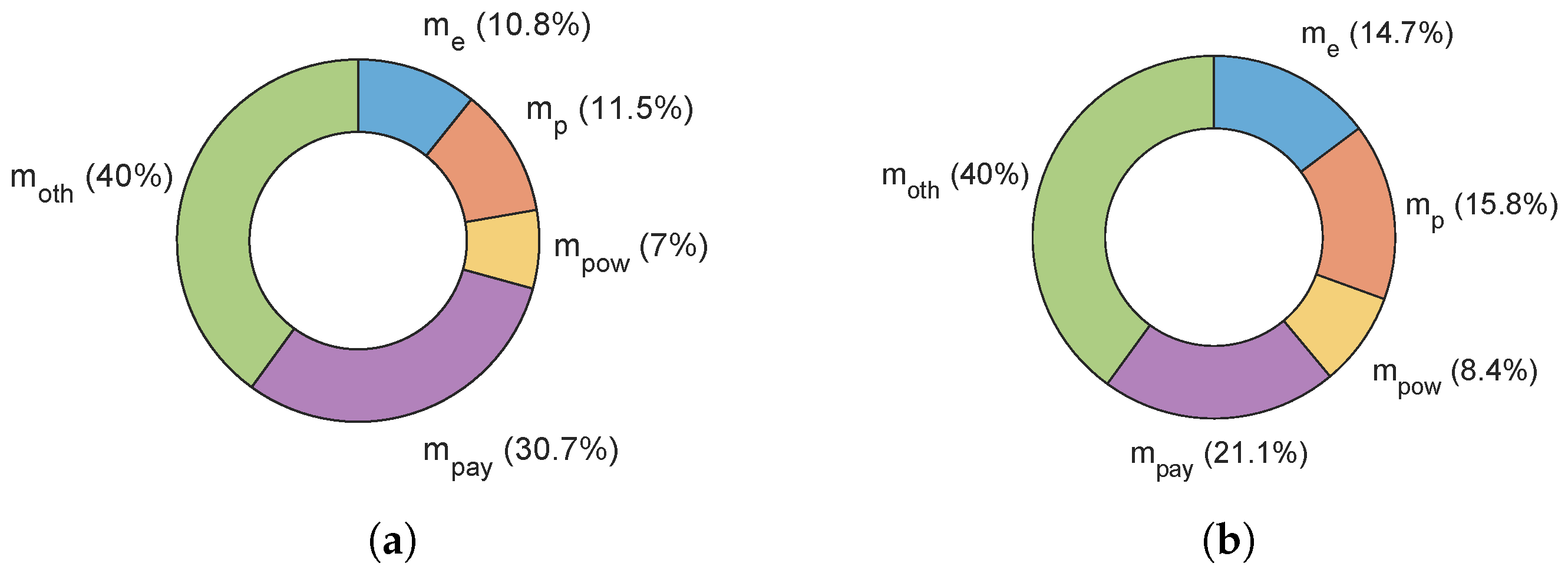
The solution to the optimization problem gives a minimum flight time of about
and a propellant mass expenditure of
(roughly
of
) when the CubeSat hosts a single engine unit, and a transfer time of
and a required propellant mass of
(roughly
of
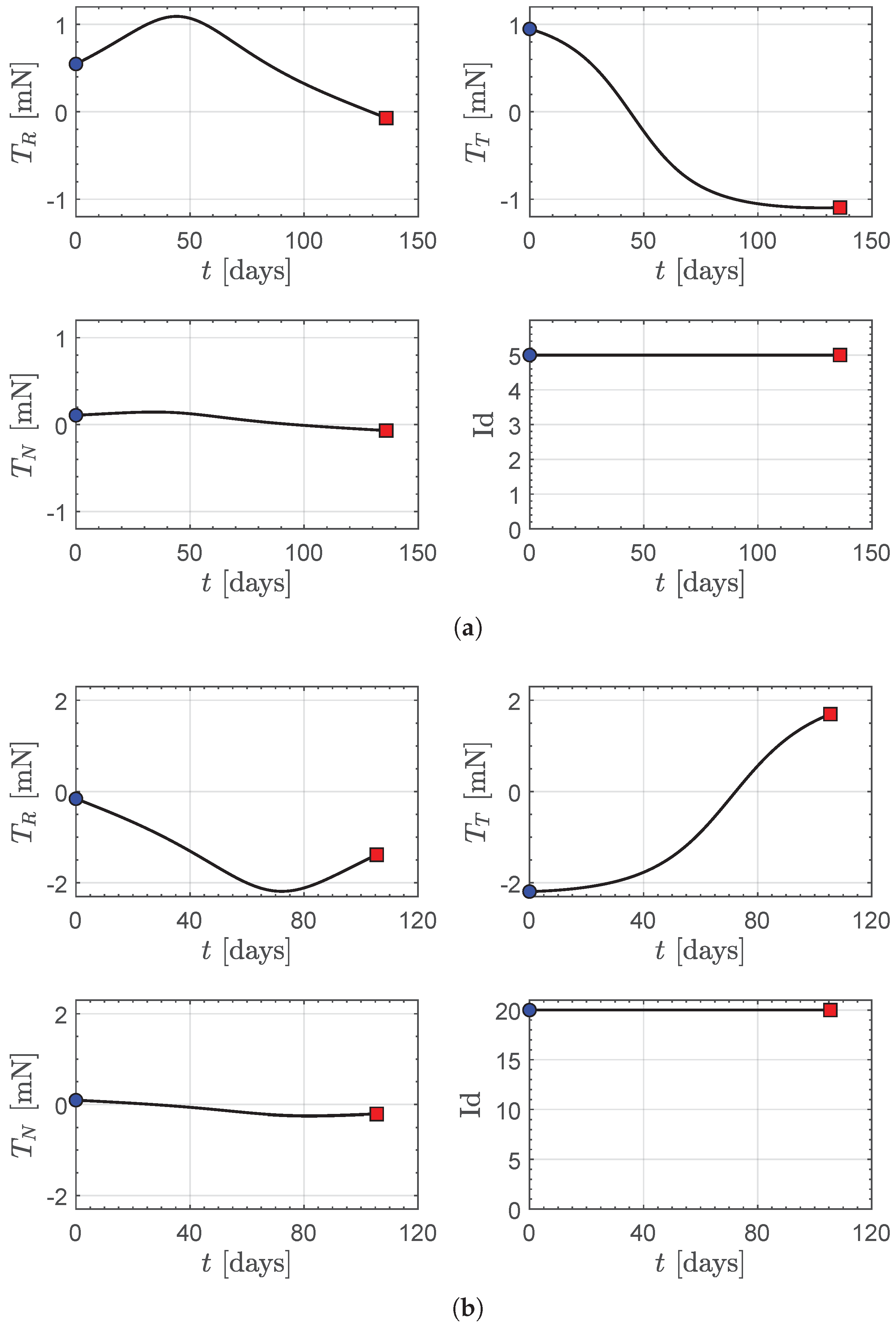
) with two installed engine units. The optimal transfer trajectory of the CubeSat is reported in
Figure 9, while
Figure 10 shows the temporal variation of the optimal control laws in terms of thrust vector components
and operating level
as a function of
t. In particular,
Figure 10 indicates that the propulsion system uses a single operating level during all the transfer, that is,
when the CubeSat has a single engine unit, and
when there are two units. In fact, these two operating levels correspond to the maximum magnitude of the thrust vector, as confirmed by
Table 3 and
Table 5. This is a rather common result when the performance index to be optimized is the flight time and the thrust vector direction is not constrained. Furthermore, the power subsystem is sized to allow the delivery of the required electric power from the maximum thrust level up to a distance from the Sun of
, and the optimal transfer trajectory clearly indicates that the spacecraft is at a distance of about
during the entire heliocentric transfer; see the ecliptic projection of the optimal transfer trajectory shown on the left side of
Figure 9. The situation is different when the electric power provided by the solar panels is not sufficient to allow the use of maximum thrust. For this reason, the last part of this section will analyze the transfer to the asteroid 2000 SG344 considering a value of
smaller than the one that allows obtaining the results summarized in
Figure 9 and
Figure 10.
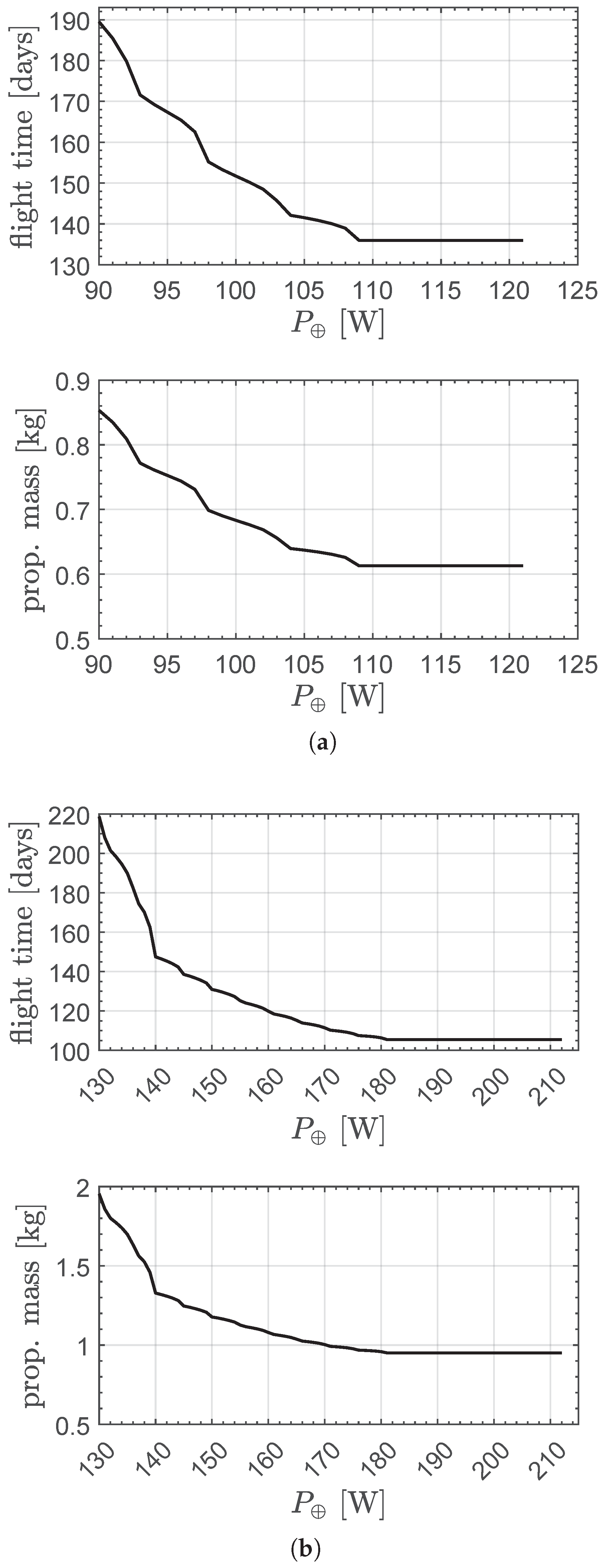
In particular, by solving the optimal control problem several times, a parametric study of the mission performance as a function of the nominal electric power
was carried out. The results of this specific study, in terms of the minimum flight time and the corresponding propellant mass consumption, are summarized in
Figure 11. The figure shows that the transfer performance degrades as the value of
decreases. For example, in the case of a single engine unit, the transition from
to
results in an increase in flight time of about
, while the required propellant mass reaches almost
. This behavior is linked to the fact that the residual electric power (once the remaining on-board subsystems have been powered) is no longer sufficient to allow the activation of the maximum thrust level permitted by the propulsion system. Therefore, other operating levels are used that require a value of electric power compatible with the availability at that given distance from the Sun. These operating levels involve an increase in flight time and a corresponding increase in the propellant mass required to complete the assigned orbital transfer.
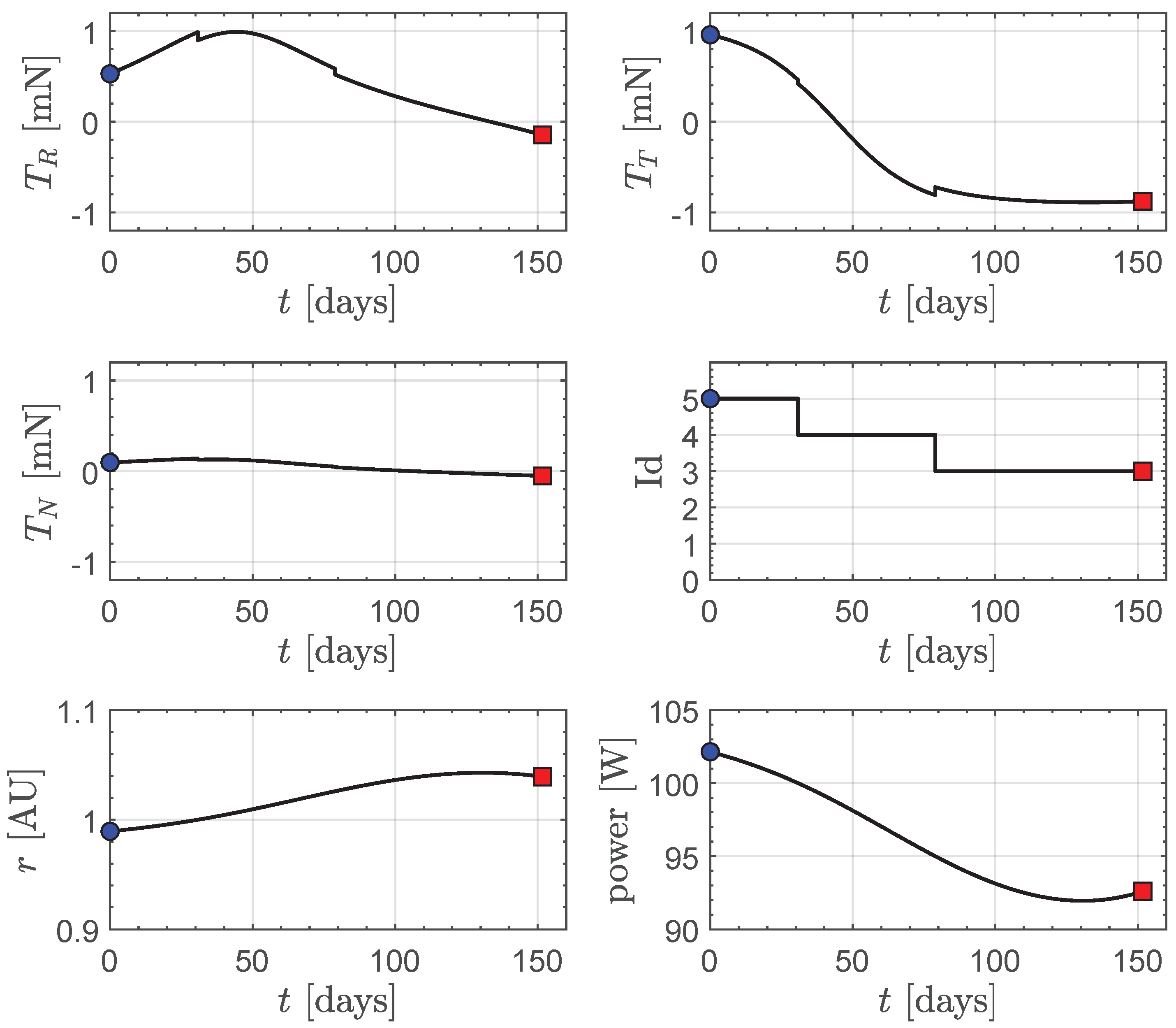
For example, when
and the CubeSat has a single engine unit, the optimal control laws are reported in
Figure 12, which shows also the temporal variation of the Sun–spacecraft distance
r and the corresponding electric power given by the solar arrays. From
Figure 12, we observe that, the engine uses three operating levels during the transfer, while the available electric power drops below
in the second half of the flight. Recall, indeed, that the payload and the other subsystems require an electric power equal to
, so that when the available power is
the engine unit can use only a value of
, which is not sufficient to activate the operating level
; see also the last row of
Table 1.
5. Final Remarks
This paper has analyzed the performance of a CubeSat equipped with a propulsion system based on the BIT-3 electric thruster in a typical heliocentric scenario involving the transfer between two Keplerian orbits of assigned characteristics. This scenario has been studied in an optimization framework where the flight time required to complete the orbital transfer is minimized. The study of the transfer performance takes into account the actual thrust levels of the engine and also considers the presence of two propulsion units on board, even if the procedure can be easily extended to the case of three units. This possibility of installing two engine units on the CubeSat allows for a large number of possible combinations of thrust and electric power required for the operation of the propulsion system. In particular, in the case in which the electric power is sufficient to activate the operating level corresponding to the maximum available thrust magnitude, and since the direction of the thrust vector is not constrained as often happens in the use of solar electric propulsion systems, the solution of the optimal control problem in which the flight time is minimized provides the classic result where the maximum available thrust value is locally employed. This result corresponds to selecting a single operating level during the entire heliocentric transfer, although the situation is significantly different when the electric power provided by the solar arrays is no longer sufficient to allow the use of any operating level summarized in the engine’s thrust table. In this case, the optimal control law prescribes the use of different thrust levels during the interplanetary flight, depending on the local value of the available electric power. This aspect causes an increase in the flight time and a consequent increase in the propellant mass required for the transfer. One of the assumptions of the mathematical model is related to the fact that the direction of the thrust vector is not constrained during heliocentric flight and, therefore, the thrust can be directed in any direction of space. The presence of a possible constraint on the direction of the thrust vector would lead to a degradation in mission performance.
A lower value of this (required) propellant mass could be obtained by solving an optimization problem in which the final mass of the spacecraft is maximized. The solution to this specific problem, together with the one in which three engine units are considered in the CubeSat preliminary design, is a possible extension of the work illustrated in this paper. A second possible and interesting extension of this work concerns the introduction of a more refined model for the schematization of the electric power supplied by high-performance solar panels. Such a model, for example, could consider the effects related to variations in performances due to the degradation of the film covering the solar cells or to the equilibrium temperature whose value also depends on the distance of the spacecraft from the Sun. A third and last possible completion of the model could concern the analysis of the uncertainties related to the interplanetary trajectory of the spacecraft and therefore, in essence, the possible presence of trajectory correction maneuvers that allow the CubeSat to be brought back along its nominal optimal transfer orbit.
However, although it is theoretically possible to use a continuous-thrust propulsion system, generic trajectory correction maneuvers are planned and implemented assuming a substantially impulsive velocity change, and therefore, a high-thrust propulsion system is used. In this sense, analysis of possible uncertainties in the context of an interplanetary transfer of a small space vehicle such as a CubeSat could then lead to considering an innovative propulsion system capable of providing both (continuous) low thrust with a high specific impulse and (impulsive) high thrust with lower specific impulse. Such a propulsion system could be a hybrid solution between an electric and a chemical engine, or a more innovative thruster that involves the use of a multimode propulsion system in which a single type of propellant is fully exploited with two different thrust concepts.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}