
An Echo State Network Approach for Parameter Variation Robustness Enhancement in FCS-MPC for PMSM Drives

Abstract
1. Introduction
- (1)
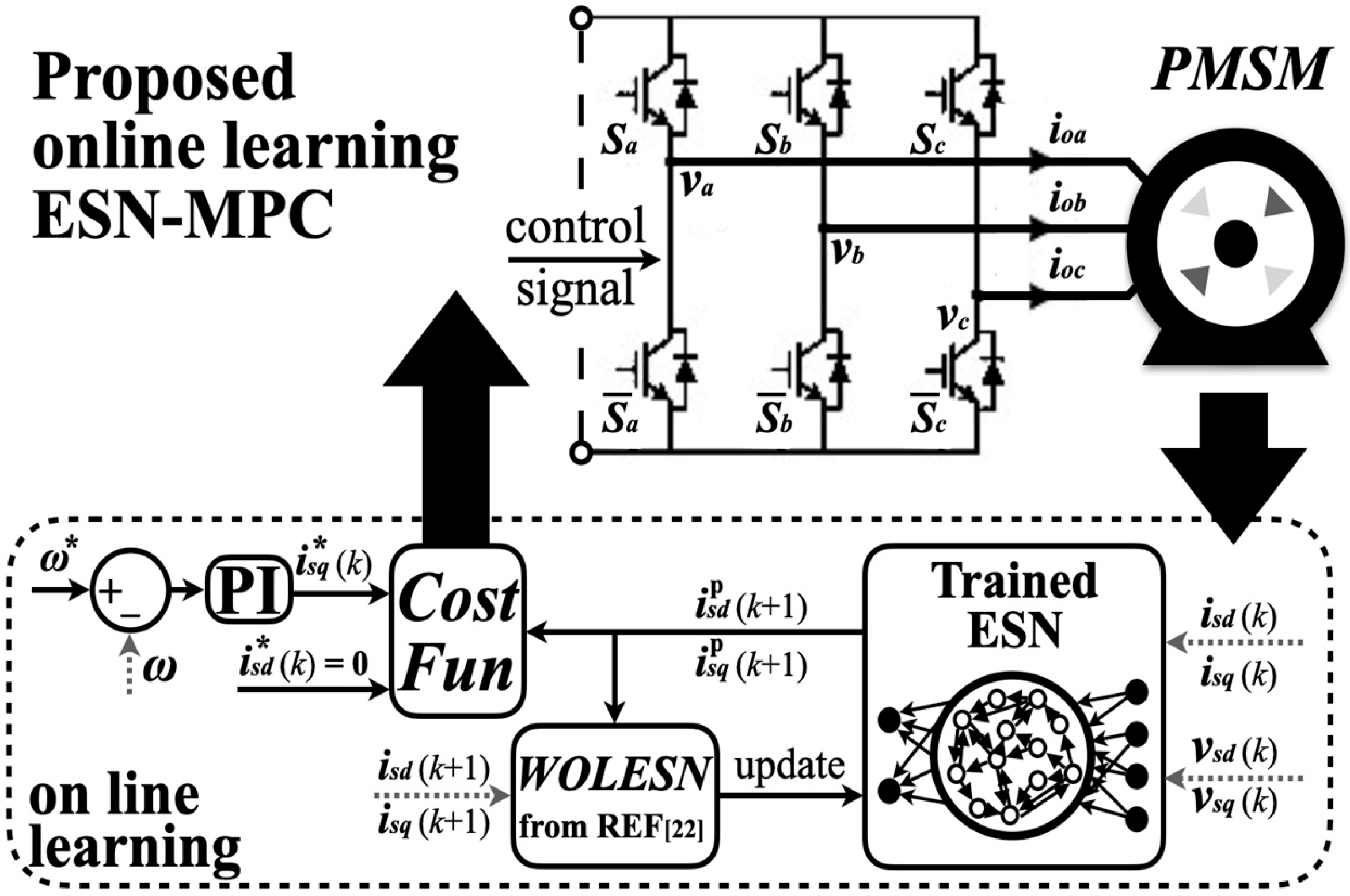
- A hybrid ESN-MPC framework is proposed. The trained ESN replaces only the prediction model in the MPC controller framework and maintains the MPC-based cost function by keeping the core MPC structure.
- (2)
- The proposed strategy enhances the robustness of the parameters. The ESN-MPC strategy is initially trained offline using data collected from a real PMSM-MPC control environment. With an online learning algorithm, the proposed controller can make rapid adjustments to mitigate parameter mismatches under real-time deployment.
- (3)
- Compared with traditional MPC, the proposed ESN-MPC approach demonstrates equivalent dynamic performance while achieving superior steady-state performance under parameter mismatch conditions.
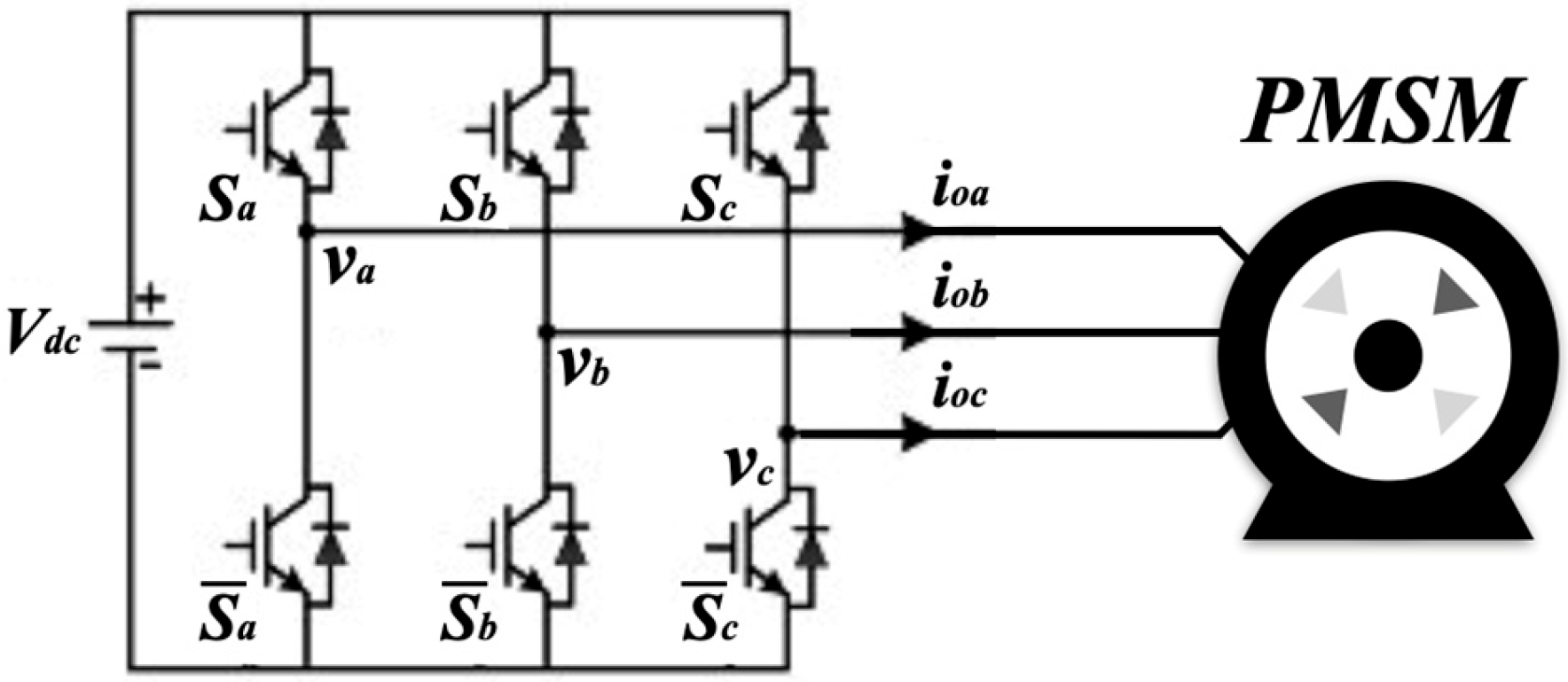
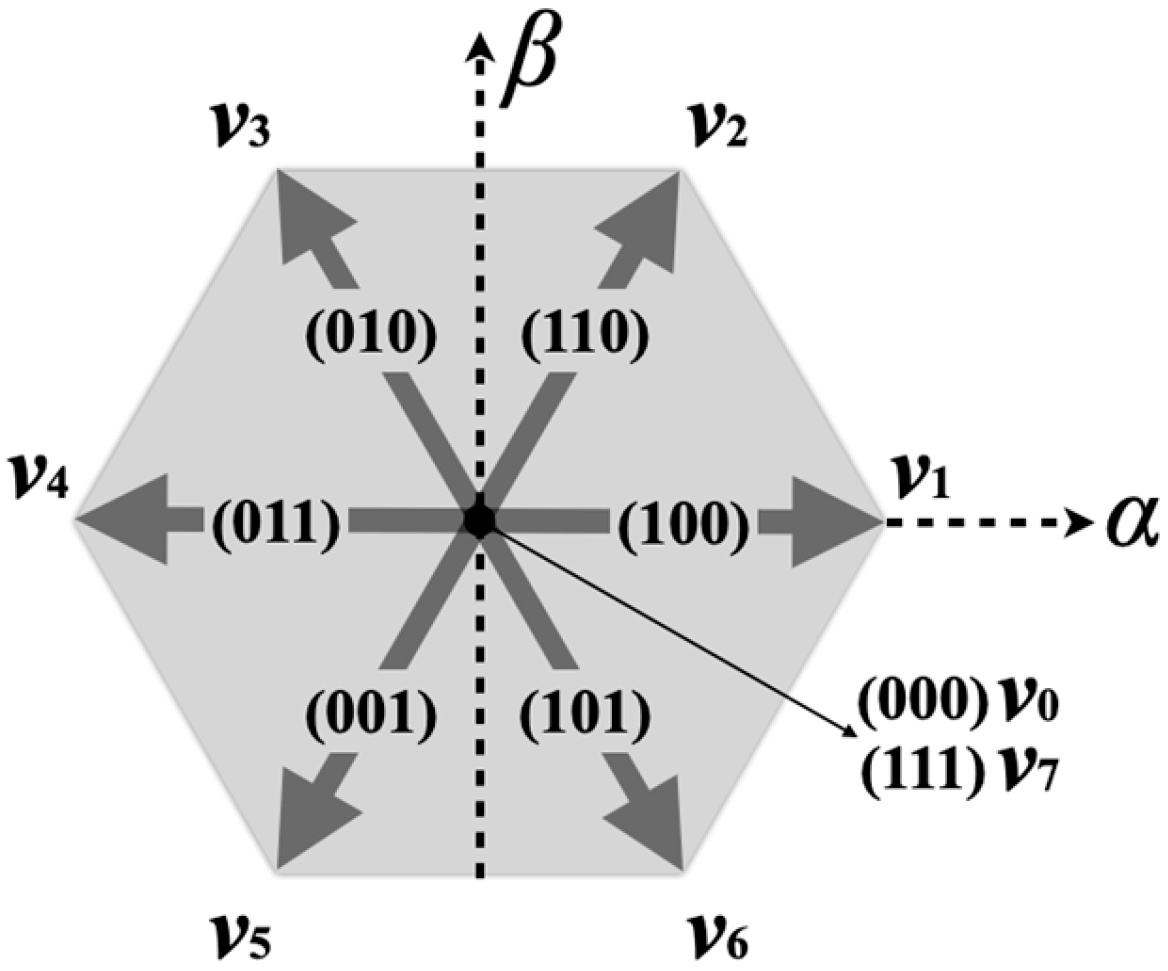
2. Model Predictive Control for PMSM Drives
3. Proposed ESN-MPC Strategy for PMSM
3.1. Structure of ESN
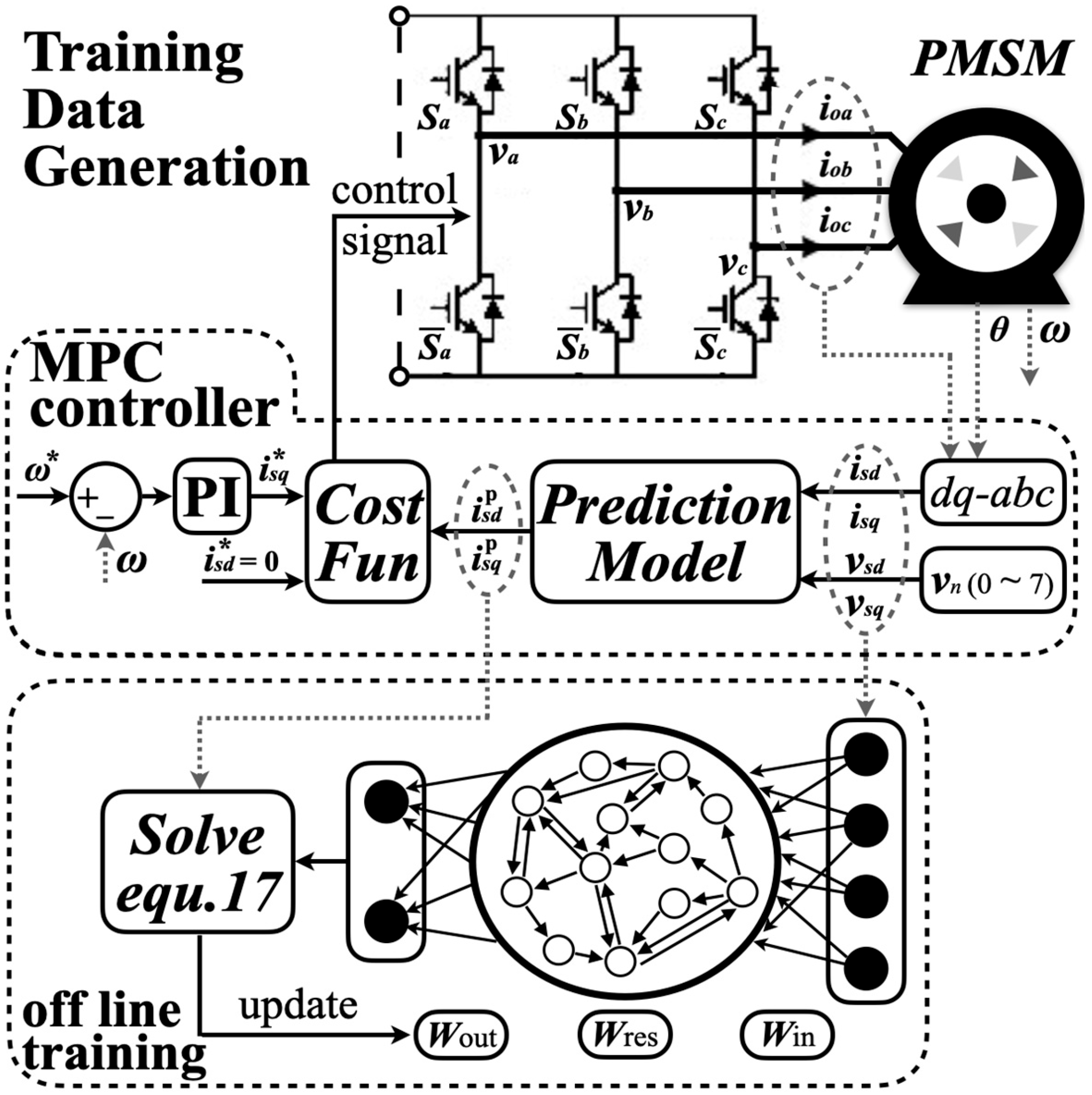
3.2. Offline Training of ESN
3.3. Proposed ESN-MPC Controller and Online Learning Process
3.4. Computational Complexity Analyze
4. Simulation Validation
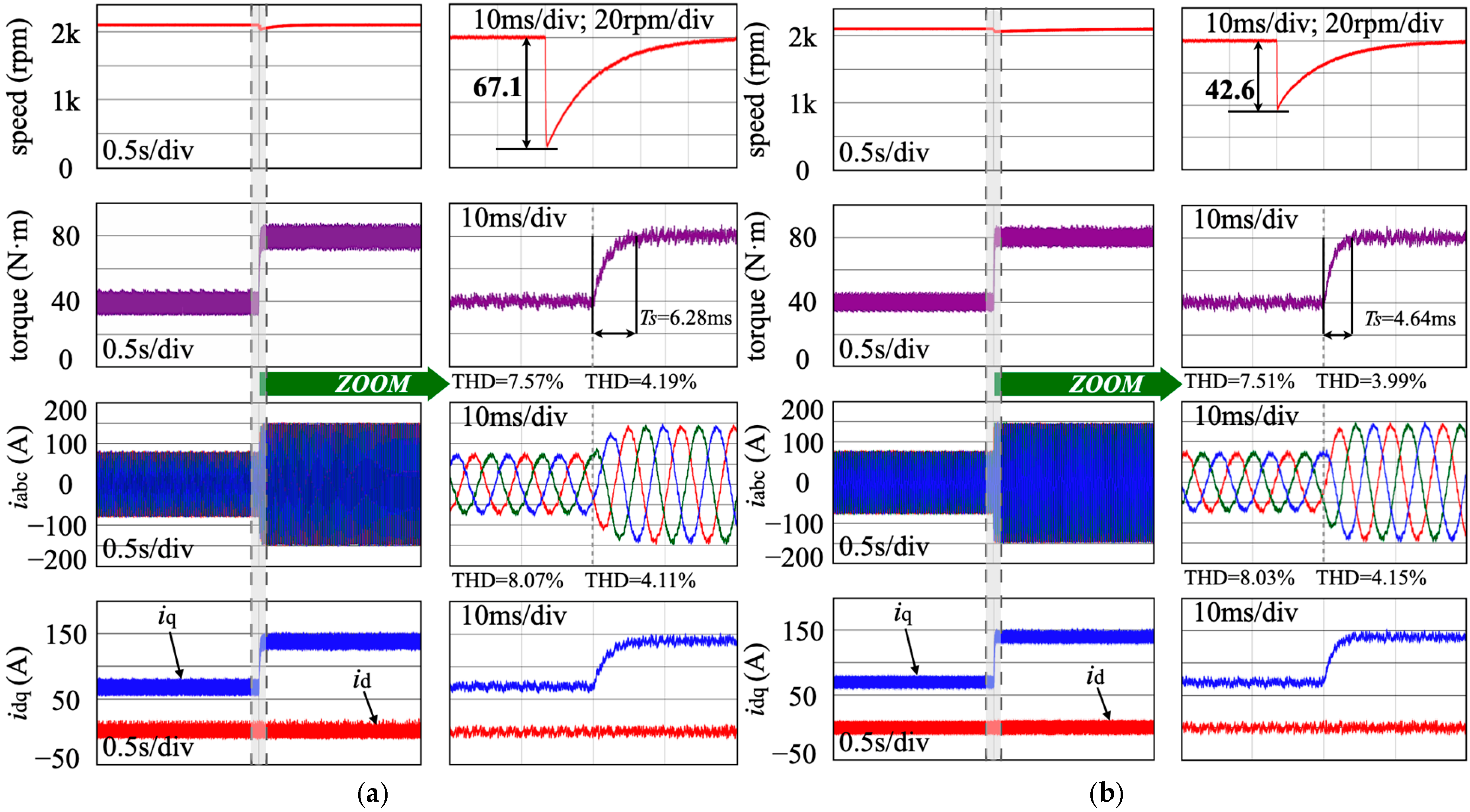
4.1. Dynamic Response to Torque Load Change
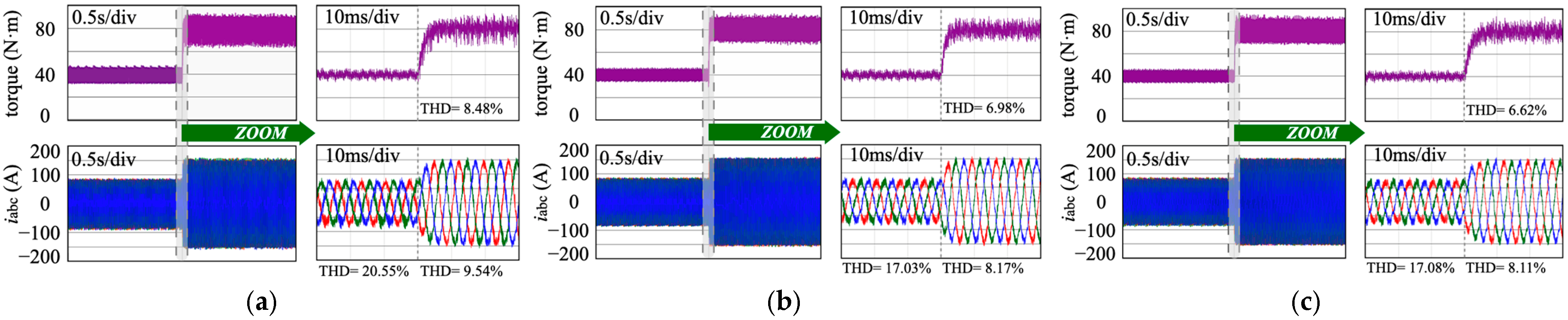
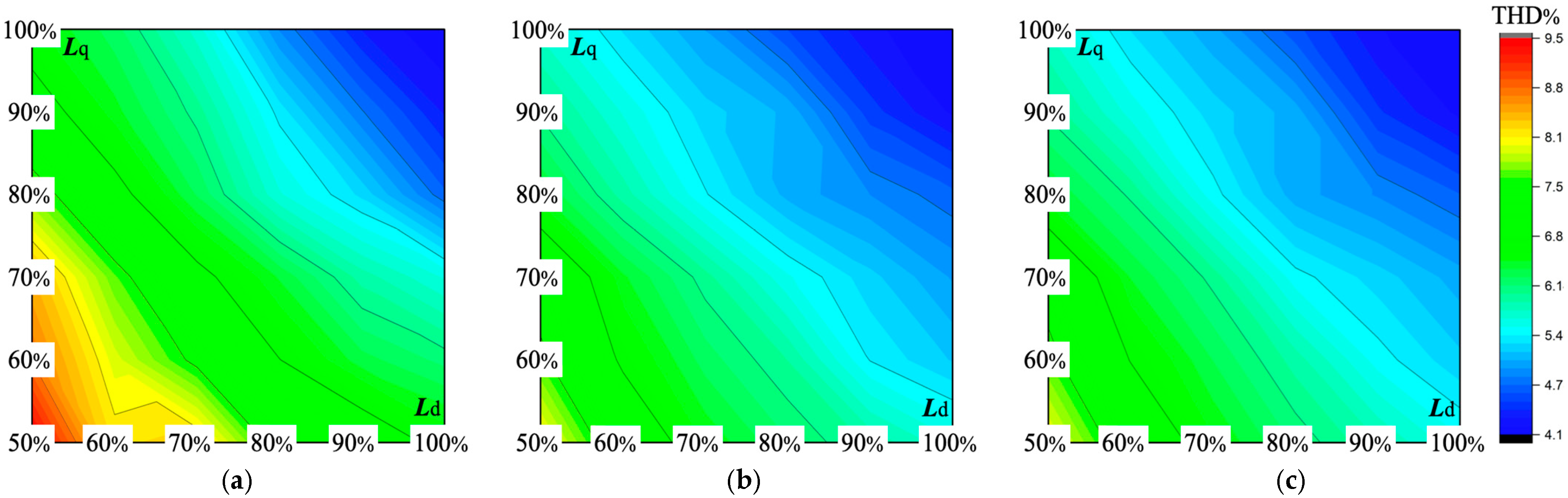
4.2. Inductance Parameter Mismatch Investigation
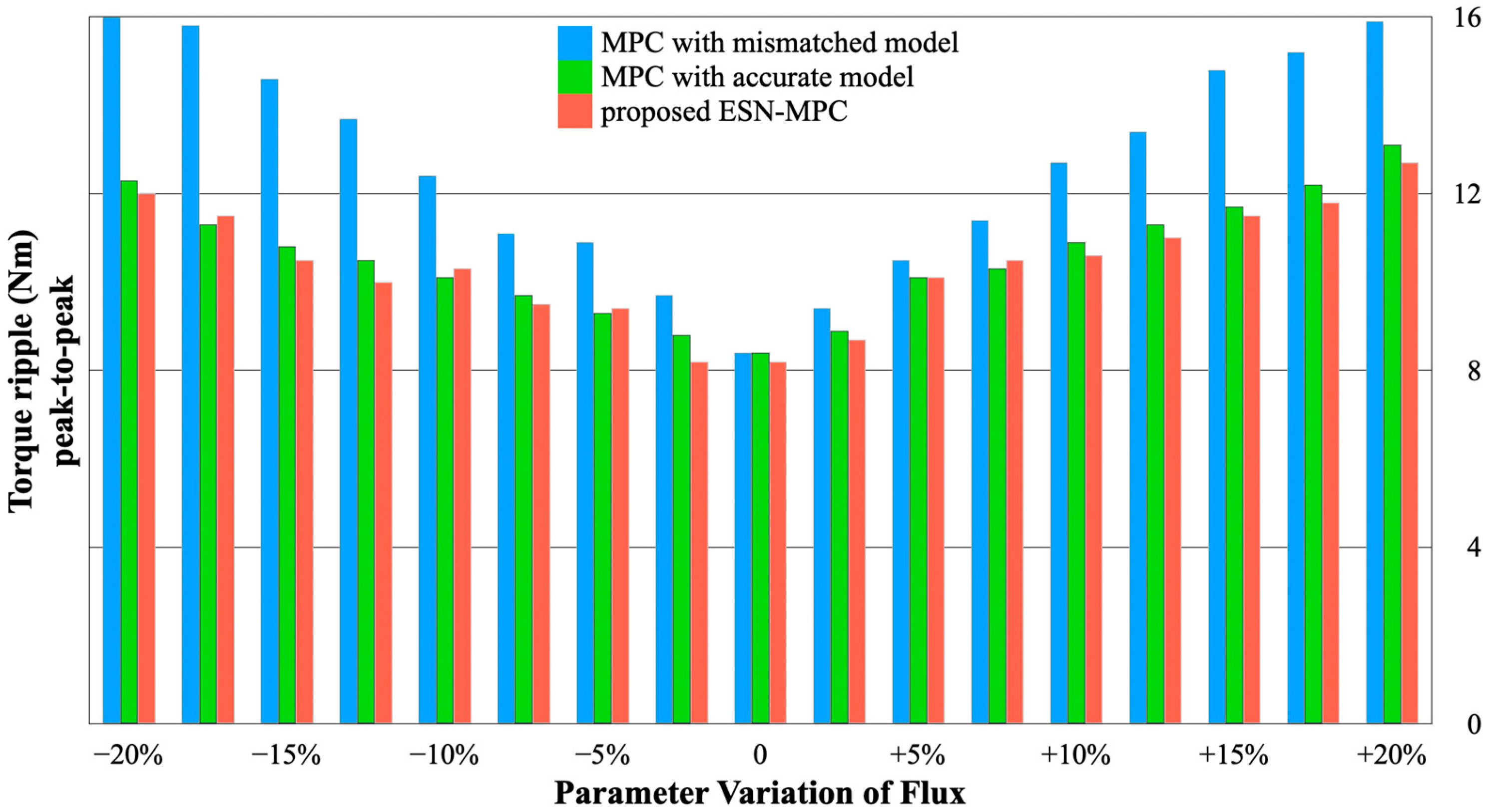
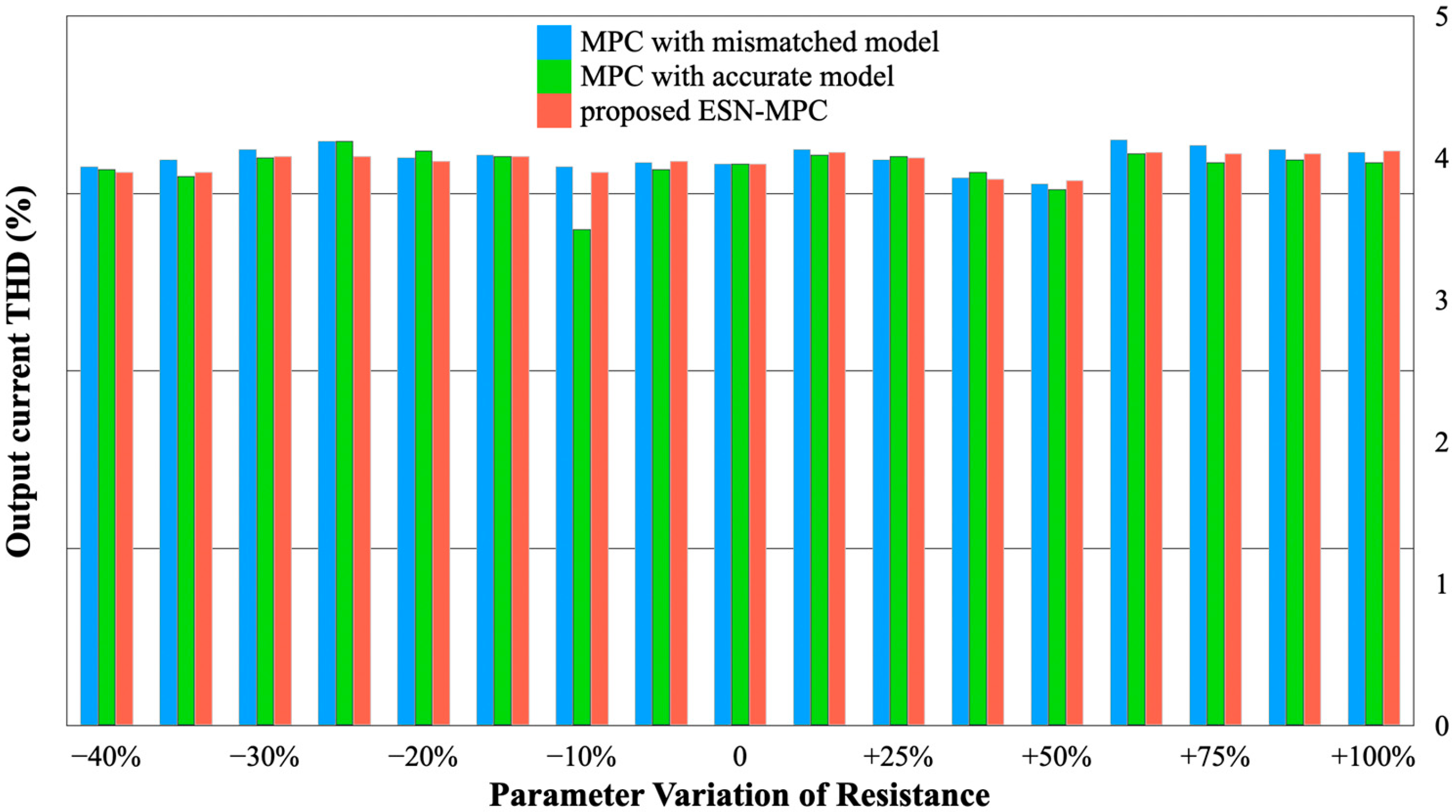
4.3. Flux and Resistance Parameter Mismatch Investigation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Tu, W.; Luo, G.; Chen, Z.; Cui, L.; Kennel, R. Predictive cascaded speed and current control for PMSM drives with multi-timescale optimization. IEEE Trans. Power Electron. 2019, 34, 11046–11061. [Google Scholar] [CrossRef]
- Karamanakos, P.; Liegmann, E.; Geyer, T.; Kennel, R. Model predictive control of power electronic systems: Methods, results, and challenges. IEEE Open J. Ind. Appl. 2020, 1, 95–114. [Google Scholar] [CrossRef]
- Lai, C.; Feng, G.; Mukherjee, K.; Kar, N.C. Investigations of the influence of PMSM parameter variations in optimal stator current design for torque ripple minimization. IEEE Trans. Energy Convers. 2017, 32, 1052–1062. [Google Scholar] [CrossRef]
- Rong, Y.; Wang, G.; Kong, Q. Study on the influence of ultra-thin non-oriented silicon steel sheet on the performance of ultra-high-speed permanent magnet motor. AIP Adv. 2022, 12, 065307. [Google Scholar] [CrossRef]
- Mukundan, M.S.; Dhulipati, H.; Tjong, J.; Kar, N.C. Parameter Determination of PMSM Using Coupled Electromagnetic and Thermal Model Incorporating Current Harmonics. IEEE Trans. Magn. 2018, 54, 1–5. [Google Scholar] [CrossRef]
- Young, H.A.; Perez, M.A.; Rodriguez, J. Analysis of finite-controlset model predictive current control with model parameter mismatch in a three-phase inverter. IEEE Trans. Ind. Electron. 2016, 63, 31003107. [Google Scholar] [CrossRef]
- Beerten, J.; Verveckken, J.; Driesen, J. Predictive direct torque control for flux and torque ripple reduction. IEEE Trans. Ind. Electron. 2010, 57, 404–412. [Google Scholar] [CrossRef]
- Lin, C.-K.; Liu, T.-H.; Yu, J.-T.; Fu, L.-C.; Hsiao, C.-F. Model-Free Predictive Current Control for Interior Permanent-Magnet Synchronous Motor Drives Based on Current Difference Detection Technique. IEEE Trans. Ind. Electron. 2014, 61, 667–681. [Google Scholar] [CrossRef]
- Yin, Z.; Wang, X.; Su, X.; Shen, Y.; Xiao, D.; Zhao, H. A Switched Ultra-Local Model-Free Predictive Controller for PMSMs. IEEE Trans. Power Electron. 2024, 39, 10665–10669. [Google Scholar] [CrossRef]
- Niu, L.; Yang, M.; Xu, D. An adaptive robust predictive current control for PMSM with online inductance identification. Int. Rev. Electr. Eng. 2012, 7, 3845–3856. [Google Scholar]
- Xia, C.; Wang, M.; Song, Z.; Liu, T. Robust model predictive current control of three phase voltage source PWM rectifier with online disturbance observation. IEEE Trans. Ind. Informat. 2012, 8, 459–471. [Google Scholar] [CrossRef]
- Kwak, S.; Moon, U.; Park, J. Predictive-Control-Based direct power control with an adaptive parameter identification technique for improved AFE performance. IEEE Trans. Power Electron. 2014, 29, 6178–6187. [Google Scholar] [CrossRef]
- Pirsto, V.; Kukkola, J.; Rahman, F.M.M.; Hinkkanen, M. Real-Time identification of LCL filters employed with grid converters. IEEE Trans. Ind. Appl. 2020, 56, 5158–5169. [Google Scholar] [CrossRef]
- Arcari, E.; Iannelli, A.; Carron, A.; Zeilinger, M.N. Stochastic MPC With Robustness to Bounded Parameteric Uncertainty. IEEE Trans. Autom. Control 2023, 68, 7601–7615. [Google Scholar] [CrossRef]
- Yuzgec, U.; Becerikli, Y.; Turker, M. Dynamic Neural-Network-Based Model-Predictive Control of an Industrial Baker’s Yeast Drying Process. IEEE Trans. Neural Netw. 2008, 19, 1231–1242. [Google Scholar] [CrossRef]
- Vazquez, S.; Marino, D.; Zafra, E.; Peña, M.D.V.; Rodríguez-Andina, J.J.; Franquelo, L.G.; Manic, M. An Artificial Intelligence Approach for Real-Time Tuning of Weighting Factors in FCS-MPC for Power Converters. IEEE Trans. Ind. Electron. 2022, 69, 11987–11998. [Google Scholar] [CrossRef]
- Yao, C.; Ma, G.; Sun, Z.; Luo, J.; Ren, G.; Xu, S. Weighting Factors Optimization for FCS-MPC in PMSM Drives Using Aggregated Residual Network. IEEE Trans. Power Electron. 2024, 39, 1292–1307. [Google Scholar] [CrossRef]
- Prasad, M.V.S.; Suprabhath, K.S.; Madichetty, S.; Mishra, S.; El Kamel, A. Design and Implementation of Model Parameter Independent Robust Current Control Scheme of Three-Phase Inverter—A Neural Network-Based Classification Approach. CPSS Trans. Power Electron. Appl. 2024, 9, 166–174. [Google Scholar] [CrossRef]
- Bana, P.R.; Amin, M.; Molinas, M. ANN-Based Surrogate PI and MPC Controllers for Grid-Connected VSC System: Small-Signal Analysis and Comparative Evaluation. IEEE J. Emerg. Sel. Top. Power Electron. 2024, 12, 566–578. [Google Scholar] [CrossRef]
- Pang, S.; Zhang, Y.; Huangfu, Y.; Li, X.; Tan, B.; Li, P.; Tian, C.; Quan, S. A Virtual MPC-Based Artificial Neural Network Controller for PMSM Drives in Aircraft Electric Propulsion System. IEEE Trans. Ind. Appl. 2024, 60, 3603–3612. [Google Scholar] [CrossRef]
- Armenio, L.B.; Terzi, E.; Farina, M.; Scattolini, R. Echo State Networks: Analysis, training and predictive control. In Proceedings of the 2019 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019. [Google Scholar]
- Chen, X.; Jin, L.; Li, S. An Online Learning Strategy for Echo State Network. IEEE Trans. Syst. Man Cybern. Syst. 2024, 54, 644–655. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Strategies | Estimate FLOPs | Estimate Resource Utilization (Control Frequency: 20 kHz) |
|---|---|---|
| Conventional FCS-MPC | ||
| 1 prediction step | 272 | 1.36% |
| 2 prediction step | 2176 | 10.88% |
| 3 prediction step | 17408 | 87.04% |
| Proposed ESN-MPC | ||
| NH = 5, with/without activate online learning | 708/453 | 3.54%/2.26% |
| NH = 10, with/without activate online learning | 1615/1080 | 8.07%/5.40% |
| NH = 15, with/without activate online learning | 3078/2163 | 15.39%/10.81% |
| NH = 20, with/without activate online learning | 4863/3468 | 24.31%/17.34% |
| NH = 30, with/without activate online learning | 9441/6786 | 47.21%/33.93% |
| Parameter | Symbol | Value |
|---|---|---|
| Inverter parameter | ||
| inverter type | / | 2L-3P VSI |
| sampling delay | / | 1.5 µs |
| dead time delay | / | 2.2 µs |
| DC-side capacitor | Vdc | 400 V |
| control frequency | fsw | 20 k Hz |
| PMSM parameter | ||
| stator resistance | R | 0.1 Ω |
| q-axis inductance | Lq | 0.8 mH |
| d-axis inductance | Ld | 0.6 mH |
| pole pairs | p | 4 |
| flux | ψf | 0.985 Wb |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, X.; Li, J.; Yang, P.; Cai, H.; Zhou, Y.; Li, D. An Echo State Network Approach for Parameter Variation Robustness Enhancement in FCS-MPC for PMSM Drives. Appl. Sci. 2025, 15, 6288. https://doi.org/10.3390/app15116288
Zeng X, Li J, Yang P, Cai H, Zhou Y, Li D. An Echo State Network Approach for Parameter Variation Robustness Enhancement in FCS-MPC for PMSM Drives. Applied Sciences. 2025; 15(11):6288. https://doi.org/10.3390/app15116288
Chicago/Turabian StyleZeng, Xiao, Jing Li, Pengcheng Yang, Hongda Cai, Yongzhi Zhou, and Daren Li. 2025. "An Echo State Network Approach for Parameter Variation Robustness Enhancement in FCS-MPC for PMSM Drives" Applied Sciences 15, no. 11: 6288. https://doi.org/10.3390/app15116288
APA StyleZeng, X., Li, J., Yang, P., Cai, H., Zhou, Y., & Li, D. (2025). An Echo State Network Approach for Parameter Variation Robustness Enhancement in FCS-MPC for PMSM Drives. Applied Sciences, 15(11), 6288. https://doi.org/10.3390/app15116288