A Review on Automated Detection and Identification Algorithms for Highway Pavement Distress

Abstract
1. Introduction
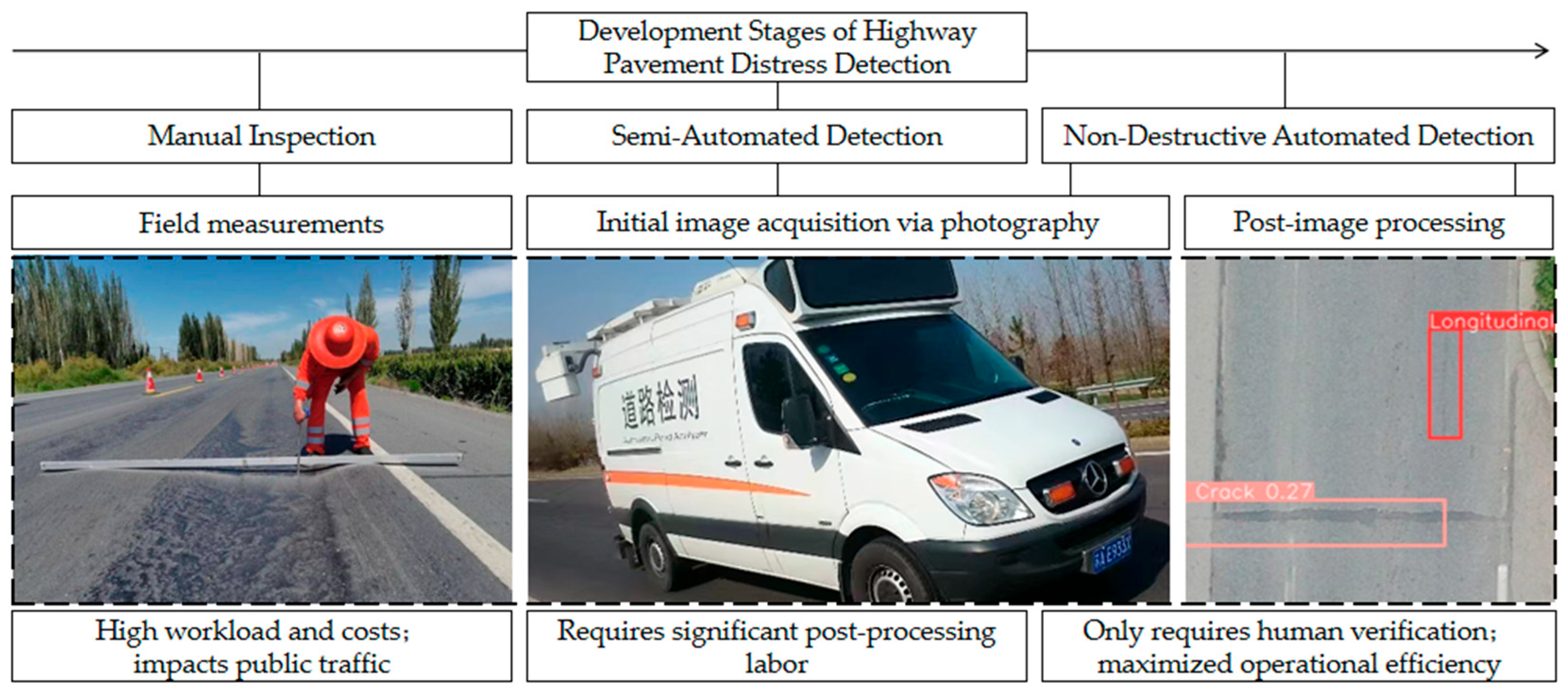
2. Development Stages of Pavement Distress Detection
2.1. Manual Inspection Stage
2.2. Semi-Automated Detection Stage
2.3. Non-Destructive Automated Detection Stage
3. Evolution of Pavement Image Acquisition Systems
3.1. Image Acquisition During Semi-Automatic Detection Stage
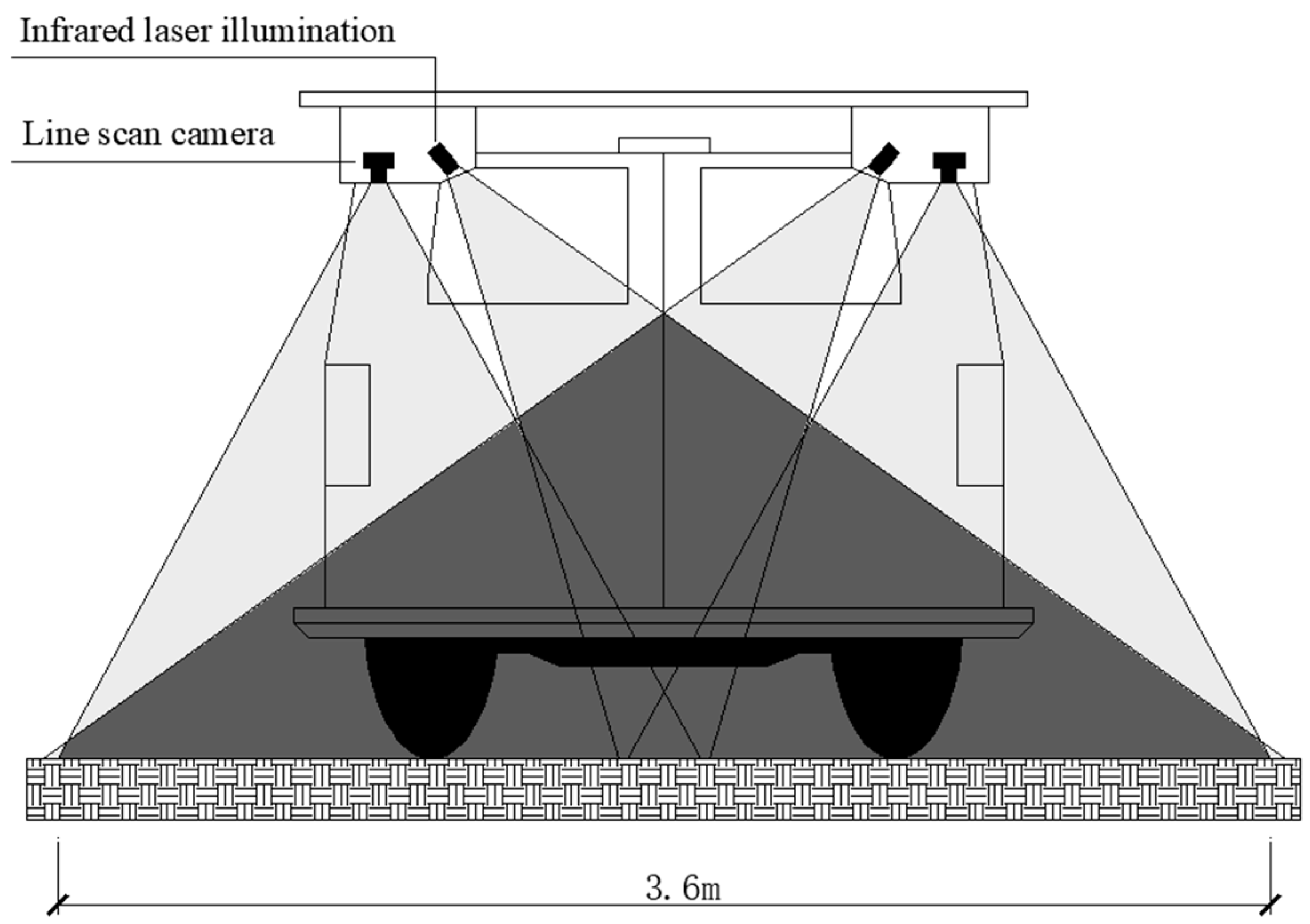
3.2. Image Acquisition During Non-Destructive Automated Detection Stage
4. Evolution of Pavement Image Processing Techniques
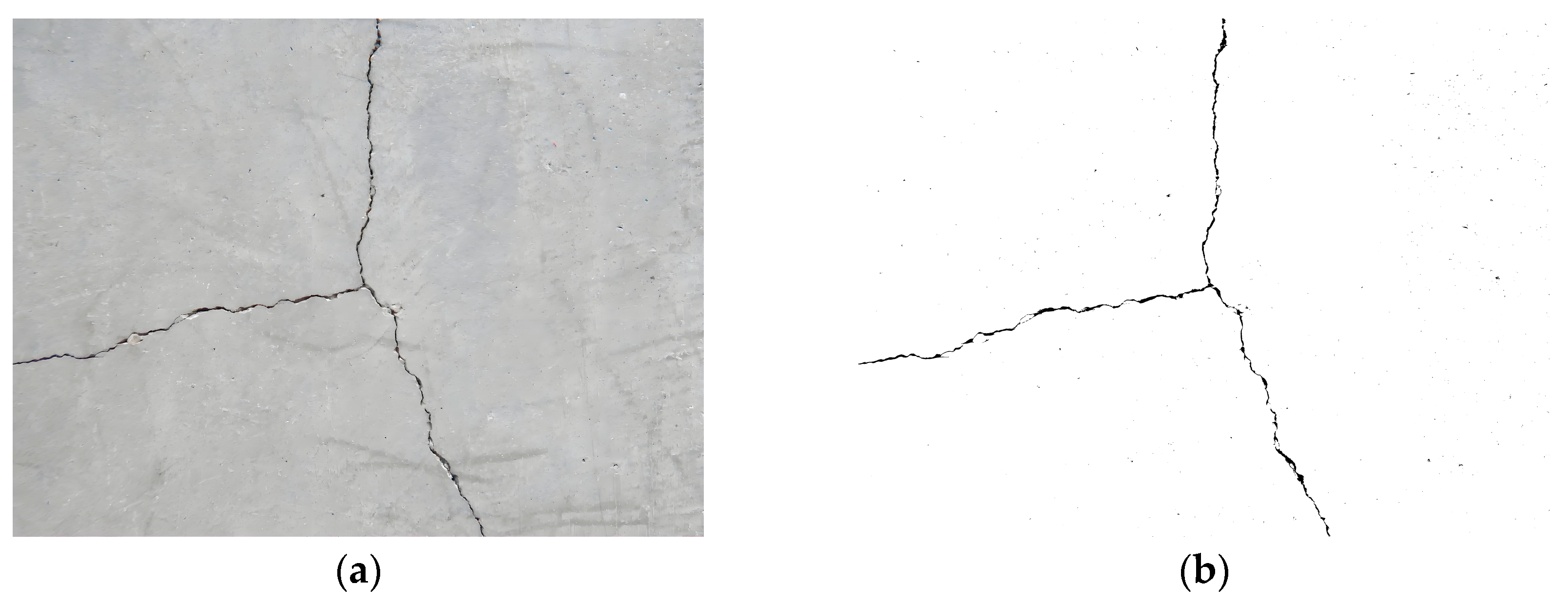
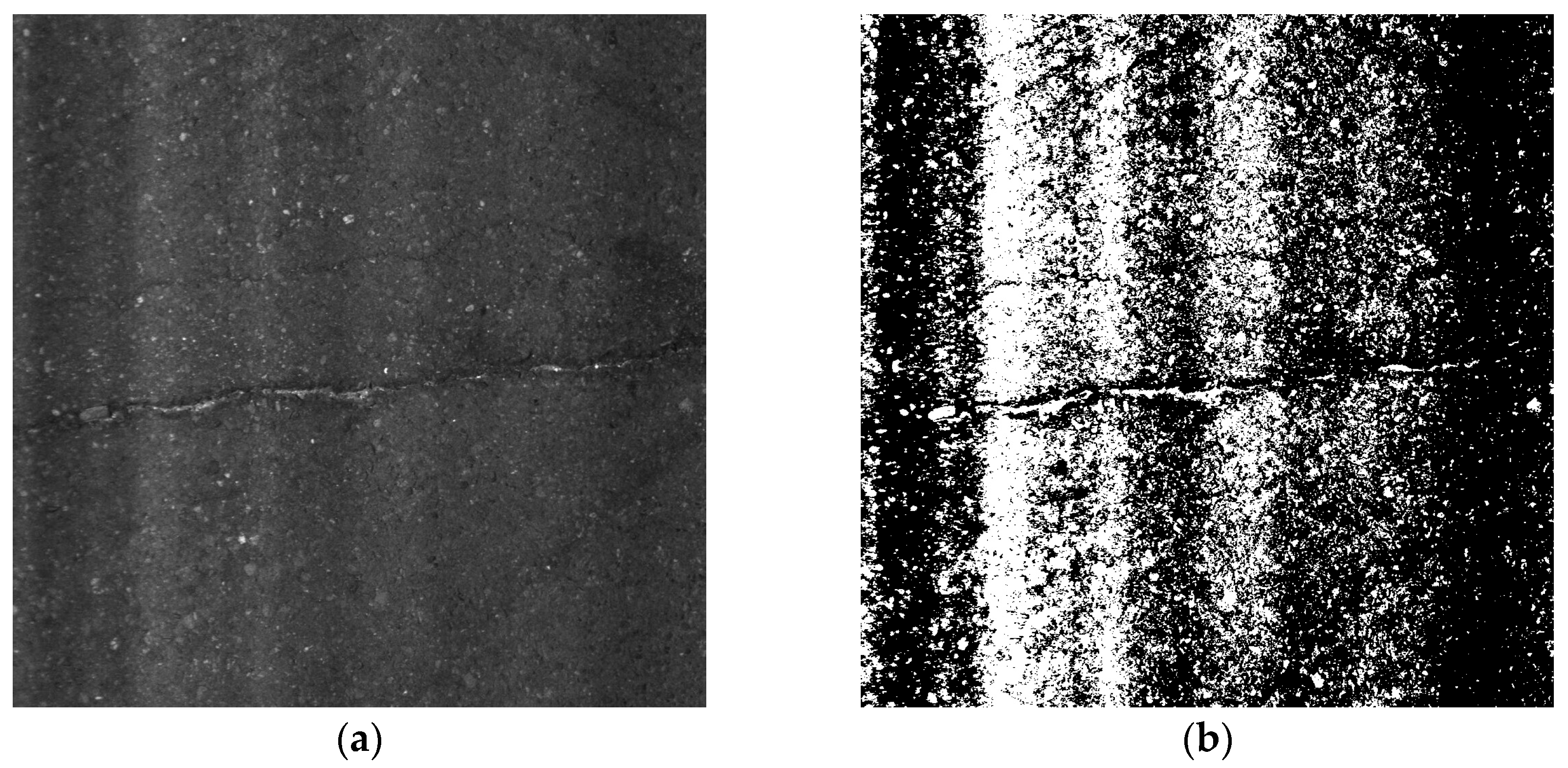
4.1. Conventional Image Processing Techniques
4.2. Conventional Machine Learning Methodologies
4.3. Deep Learning Approaches
4.3.1. Image Classification
4.3.2. Object Detection
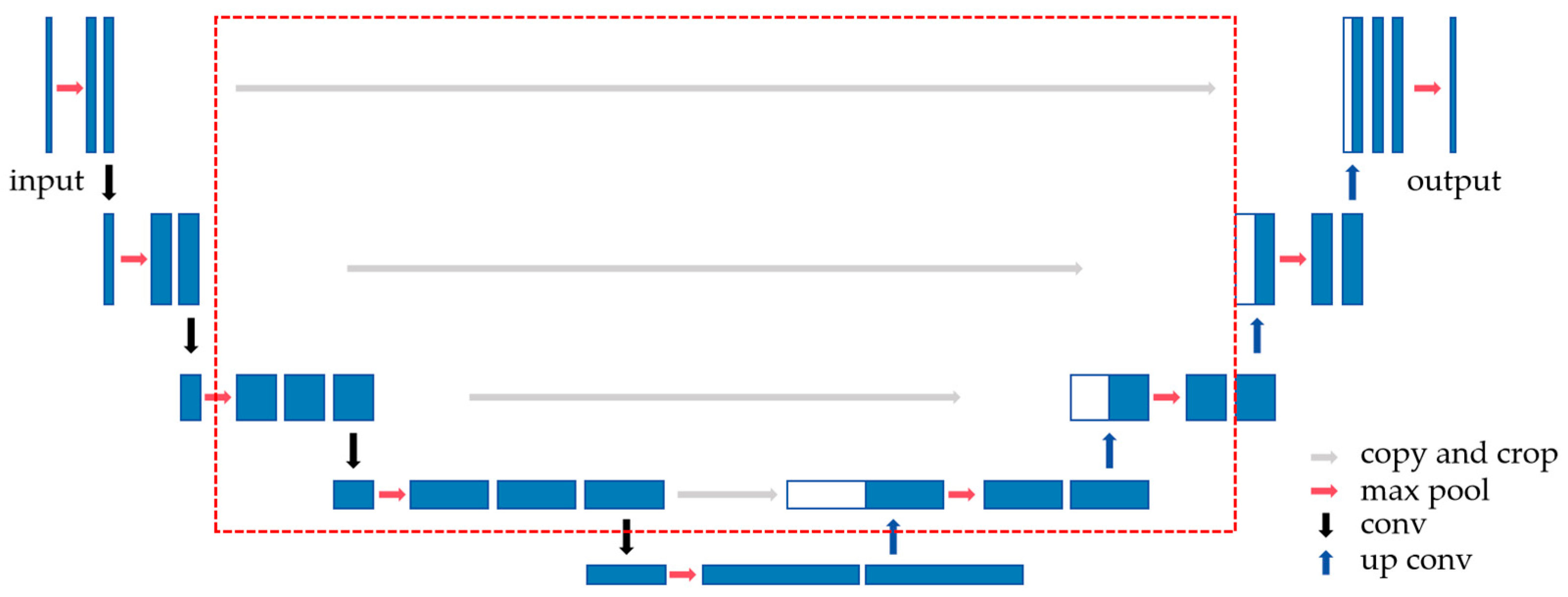
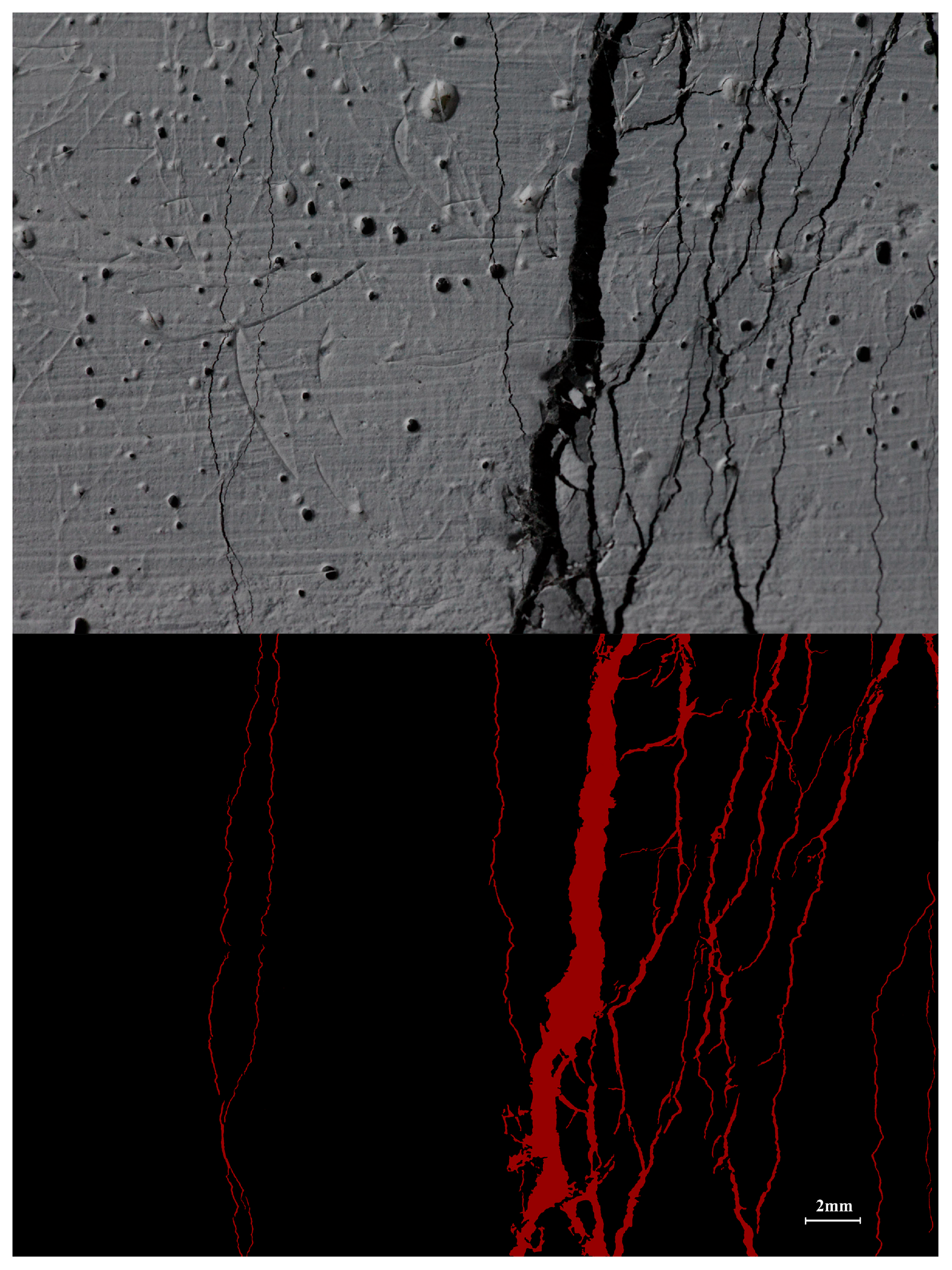
4.3.3. Semantic Segmentation
5. Discussion
5.1. Technical Limitations in Current Paradigms
5.2. Strategic Roadmap for Next-Generation Systems
- (1)
- Environmental Adaptability: Develop comprehensive multi-condition pavement image datasets incorporating robust sensors (e.g., millimeter-wave radar [86]) while enhancing algorithmic robustness to environmental noise and variations.
- (2)
- Dataset Optimization: Leverage advanced self-supervised learning techniques [87] to effectively utilize unlabeled pavement images, significantly reducing annotation requirements and improving model generalization.
- (3)
- Edge Deployment: Following Zhang et al.’s [88] demonstration of YOLOv5s on Jetson TX2 (achieving 90.5% accuracy at 30.7ms), future work should focus on integrating pixel-level segmentation models into specialized inspection vehicles for end-to-end automated road quality assessment.
- (4)
- Predictive Maintenance: Combine high-precision segmentation models with historical inspection data, traffic load patterns, and environmental factors to develop reliable 3–5 year performance prediction models for proactive maintenance planning.
Funding
Conflicts of Interest
References
- Ma, J.; Zhao, X.M.; He, S.H.; Song, H.X.; Zhao, Y.; Song, H.S.; Cheng, L.; Wang, J.F.; Yuan, Z.Y.; Huang, F.W.; et al. Review of pavement detection technology. Traffic Transp. Eng. 2017, 17, 121–137. (In Chinese) [Google Scholar]
- Lu, J. Application of Image Systemforroad Pavement Distress Test. Master’s Thesis, Southeast University, Nanjing, China, 2007. (In Chinese). [Google Scholar]
- Chuai, E.Y. Development summary of international pavement surface distress automatic survey system. Commun. Stand. 2009, 204, 96–99. (In Chinese) [Google Scholar]
- Hou, X.S.; Wang, Z.R.; Liu, Z.P. Technical exploration of automatic acquisition and processing equipment for road damage images. Highway 2023, 2, 66–69. (In Chinese) [Google Scholar]
- Xu, Z.G. Automatic Recognition Technology for Road Surface Damage Images; Xidian University Press: Xi’an, China, 2018. (In Chinese) [Google Scholar]
- Laurent, J.; Talbot, M.; Doucet, M. Road Surface Inspection Using Laser Scanners Adapted for the High Precision 3D Measurements of Large Flat Surfaces. In Proceedings of the International Conference on Recent Advances in 3-D Digital Imaging and Modeling, Ottawa, ON, Canada, 12–15 May 1997. [Google Scholar] [CrossRef]
- Themistocleous, K.; Neocleous, K.; Pilakoutas, K.; Hadjimitsis, D.G. Damage Assessment using Advanced Non-Intrusive Inspection Methods: Integration of Space, UAV, GPR, and field spectroscopy. In Proceedings of the Second International Conference On Remote Sensing And Geoinformation of the Environment (RSCy2014), Paphos, Cyprus, 7–10 April 2014. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, X.; Sun, M.; Zhao, Q.Z. Object-based and supervised detection of potholes and cracks from the pavement images acquired by UAV. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 209–217. [Google Scholar] [CrossRef]
- Pan, Y.; Zhang, X.; Cervone, G.; Yang, L.P. Detection of asphalt pavement potholes and cracks based on the unmanned aerial vehicle multispectral imagery. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2018, 11, 3701–3712. [Google Scholar] [CrossRef]
- Pan, Y.F.; Chen, X.; Sun, Q.; Zhang, X.F. Monitoring asphalt pavement aging and damage conditions from low-altitude UAV imagery based on a CNN approach. Can. J. Remote Sens. 2021, 47, 432–449. [Google Scholar] [CrossRef]
- Hong, Z.H.; Yang, F.; Pan, H.Y.; Zhou, R.Y.; Zhang, Y.; Han, Y.L.; Wang, J.; Yang, S.H.; Chen, P.; Tong, X.H.; et al. Highway Crack Segmentation from Unmanned Aerial Vehicle Images Using Deep Learning. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Zhu, J.Q.; Zhong, J.T.; Ma, T.; Huang, X.M.; Zhang, W.G.; Zhou, Y. Pavement distress detection using convolutional neural networks with images captured via UAV. Autom. Constr. 2022, 133, 103991. [Google Scholar] [CrossRef]
- Zhang, Y.C.; Zuo, Z.W.; Xu, X.B.; Wu, J.Q.; Zhu, J.G.; Zhang, H.B.; Wang, J.W.; Wang, J.W.; Tian, Y. Road damage detection using UAV images based on multi-level attention mechanism. Autom. Constr. 2022, 144, 104613. [Google Scholar] [CrossRef]
- Silva, L.A.; Leithardt, V.R.Q.; Batista, V.F.L.; Villarrubia Gonzalez, G.; De Paz Santana, J.F. Automated road damage detection using UAV images and deep learning techniques. IEEE Access 2023, 11, 62918–62931. [Google Scholar] [CrossRef]
- Gao, Y.X.; Cao, H.B.; Cai, W.W.; Zhou, G.X. Pixel-level road crack detection in UAV remote sensing images based on ARD-Unet. Measurement 2023, 219, 113252. [Google Scholar] [CrossRef]
- Kumar, P.; Angelats, E. An automated road roughness detection from mobile laser scanning data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, 42, 91–96. [Google Scholar] [CrossRef]
- Ding, S.H.; Zhan, Y.; Yang, E.H.; Wang, C.P. MTD measurement of asphalt pavement based on high precision laser section elevation. J. Southeast Univ. (Nat. Sci. Ed.) 2020, 50, 137–142. [Google Scholar] [CrossRef]
- Tan, M. Research on Detection and Reconstruction of Road Surface Based-on Lynx Vehicle-Borne Laser Point Cloud. Master’s Thesis, Central South University, Changsha, China, 2012. (In Chinese). [Google Scholar]
- Hedeya, M.A.; Samir, E.; El-Sayed, E.; Abdel-Kader, M.F.; Moussa, A.; Abdel-Kader, R.F. A Low-Cost Multi-sensor Deep Learning System for Pavement Distress Detection and Severity Classification. Lect. Notes Data Eng. Commun. Technol. 2022, 113, 21–33. [Google Scholar] [CrossRef]
- Guan, J.C.; Ding, L.; Yang, X.; Liu, P.F.; Wang, H.N. Pavement surface distress detection in complex scenarios driven by multi-dimensional image fusion. J. Traffic Transp. Eng. 2024, 24, 154–179. [Google Scholar] [CrossRef]
- Lee, S.; Kim, S.; Moon, S. Development of a car-free street mapping model using an integrated system with unmanned aerial vehicles, aerial mapping cameras, and a deep learning algorithm. J. Comput. Civ. Eng. 2022, 36, 04022003. [Google Scholar] [CrossRef]
- He, J.; Gong, L.T.; Xu, C.; Wang, P.; Zhang, Y.Y.; Zheng, O.; Su, G.H.; Yang, Y.F.; Hu, J.L.; Sun, Y.C. HighRPD: A high-altitude drone dataset of road pavement distress. Data Brief 2025, 59, 111377. [Google Scholar] [CrossRef]
- Chu, Y.L. Automatic Pavement Crack Identification Systemresearch Based on Digital Image Processing. Master’s Thesis, Chang’an University, Xi’an, China, 2008. (In Chinese). [Google Scholar]
- Otsu, N. A threshold selection method from gray-level histograms. IEEE Trans. Syst. Man Cybern. 1979, 9, 62–66. [Google Scholar] [CrossRef]
- Li, P.; Wang, C.; Li, S.M.; Feng, B.C. Research on Crack Detection Method of Airport Runway Based on Twice-Threshold Segmentation. In Proceedings of the 2015 Fifth International Conference on Instrumentation and Measurement, Computer, Communication and Control (IMCCC), Qinhuangdao, China, 18–20 September 2015. [Google Scholar] [CrossRef]
- Tang, J.S.; Gu, Y.L. Automatic Crack Detection and Segmentation Using a Hybrid Algorithm for Road Distress Analysis. In Proceedings of the 2013 IEEE International Conference on Systems, Man, and Cybernetics, Manchester, UK, 13–16 October 2013. [Google Scholar] [CrossRef]
- Liu, F.F.; Xu, G.A.; Yang, Y.X.; Niu, X.X.; Pan, Y.L. Novel Approach to Pavement Cracking Automatic Detection Based on Segment Extending. In Proceedings of the 2008 International Symposium on Knowledge Acquisition and Modeling, Wuhan, China, 21–22 December 2008. [Google Scholar] [CrossRef]
- Song, M.P.; Cui, D.Q.; Yu, C.Y.; An, J.B.; Chang, C.I.; Song, M.P. Crack Detection Algorithm for Photovoltaic Image Based on Multi-Scale Pyramid and Improved Region Growing. In Proceedings of the 2018 IEEE 3rd International Conference on Image, Vision and Computing (ICIVC), Chongqing, China, 27–29 June 2018. [Google Scholar] [CrossRef]
- Hu, F. The Digital Image Identification System of Highway Pavement Disease Application Research. Master’s Thesis, Chongqing Jiaotong University, Chongqing, China, 2013. (In Chinese). [Google Scholar]
- Zou, Q.; Cao, Y.; Li, Q.Q.; Mao, Q.Z.; Wang, S. Cracktree: Automatic crack detection from pavement images. Pattern Recognit. Lett. 2012, 33, 227–238. [Google Scholar] [CrossRef]
- Cord, A.; Chambon, S. Automatic road defect detection by textural pattern recognition based on Adaboost. Comput.-Aided Civ. Infrastruct. Eng. 2012, 27, 244–259. [Google Scholar] [CrossRef]
- Shi, Y.; Cui, L.M.; Qi, Z.Q.; Meng, F.; Chen, Z.S. Automatic road crack detection using random structured forests. IEEE Trans. Intell. Transp. Syst. 2016, 17, 3434–3445. [Google Scholar] [CrossRef]
- Prasanna, P.; Dana, K.J.; Gucunski, N.; Basily, B.B.; La, H.M.; Lim, R.S.; Parvardeh, H. Automated crack detection on concrete bridges. IEEE Trans. Autom. Sci. Eng. 2016, 13, 591–599. [Google Scholar] [CrossRef]
- Hoang, N.D.; Nguyen, Q.L.; Tien Bui, D. Image processing-based classification of asphalt pavement cracks using support vector machine optimized by artificial bee colony. J. Comput. Civ. Eng. 2018, 32, 04018037. [Google Scholar] [CrossRef]
- Hoang, N.D.; Nguyen, Q.L. A novel method for asphalt pavement crack classification based on image processing and machine learning. Eng. Comput. 2019, 35, 487–498. [Google Scholar] [CrossRef]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Łukasz; Polosukhin, I. Attention is All You Need. In Proceedings of the Advances in Neural Information Processing Systems, Long Beach, CA, USA, 4–9 December 2017. [Google Scholar]
- Wang, W.H.; Xie, E.Z.; Li, X.; Fan, D.P.; Song, K.T.; Liang, D.; Lu, T.; Luo, P.; Shao, L. Pyramid Vision Transformer: A Versatile Backbone for Dense Prediction without Convolutions. In Proceedings of the IEEE International Conference on Computer Vision, Montreal, QC, Canada, 11–17 October 2021. [Google Scholar] [CrossRef]
- Wang, N.N.; Shang, L.H.; Song, X.T. A Transformer-Optimized Deep Learning Network for Road Damage Detection and Tracking. Sensors 2023, 23, 7395. [Google Scholar] [CrossRef]
- Zhang, L.; Yang, F.; Daniel Zhang, Y.; Zhu, Y.J. Road Crack Detection Using Deep Convolutional Neural Network. In Proceedings of the 23rd IEEE International Conference on Image Processing (ICIP), Phoenix, AZ, USA, 25–28 September 2016. [Google Scholar] [CrossRef]
- Li, B.X.; Wang, K.C.P.; Zhang, A.; Yang, E.H.; Wang, G.L. Automatic classification of pavement crack using deep convolutional neural network. Int. J. Pavement Eng. 2020, 21, 457–463. [Google Scholar] [CrossRef]
- Ye, W.L.; Jiang, W.; Tong, Z.; Yuan, D.D.; Xiao, J.J. Convolutional neural network for pothole detection in asphalt pavement. Road Mater. Pavement Des. 2021, 22, 42–58. [Google Scholar] [CrossRef]
- Satheesan, D.; Talib, M.; Li, S.N.; Yuan, A. An Automated Method for Pavement Surface Distress Evaluation. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives, Halifax, NS, Canada, 10–13 June 2024. [Google Scholar] [CrossRef]
- Tan, Y.; Deng, T.; Zhou, J.Y.; Zhou, Z.X. LiDAR-based automatic pavement distress detection and management using deep learning and BIM. J. Constr. Eng. Manag. 2024, 150, 04024069. [Google Scholar] [CrossRef]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Rich Feature Hierarchies for Accurate Object Detection and Semantic Segmentation. In Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014. [Google Scholar] [CrossRef]
- Girshick, R. Fast R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Volume 2015 International Conference on Computer Vision (ICCV 2015), Santiago, Chile, 17 February 2015. [Google Scholar] [CrossRef]
- Ren, S.Q.; He, K.M.; Girshick, R.; Sun, J. Faster R-CNN: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef]
- He, K.M.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask R-CNN. IEEE Trans. Pattern Anal. Mach. Intell. 2020, 42, 386–397. [Google Scholar] [CrossRef]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.Y.; Berg, A.C. SSD: Single Shot Multibox Detector. In Proceedings of the 14th European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 8–16 October 2016. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016. [Google Scholar] [CrossRef]
- Pradhan, S.; Kulkarni, S.; Ponnalagu, R.N.; Ranjan Gupta, R. Performance Evaluation of Yolov5s and Faster RCNN Models in Detection of Potholes from Road Surface Images. In Proceedings of the 2023 IEEE 20th India Council International Conference (INDICON), Hyderabad, India, 14–17 December 2023. [Google Scholar] [CrossRef]
- Li, J.Q.; Zhang, X.F.; Li, H.W. Method for Detecting Road Pavement Damage Based on Deep Learning. In Proceedings of the International Society for Optical Engineering (SPIE), Denver, CO, USA, 4–7 March 2019. [Google Scholar] [CrossRef]
- Li, H.D. Research on Pavement Distresses Location and Measurement Under the Heavy Traffic Using Deep Learning & UAV. Master’s Thesis, Chang’an University, Xi’an, China, 2019. (In Chinese) [Google Scholar] [CrossRef]
- Sekar, A.; Perumal, V. Automatic road crack detection and classification using multi-tasking Faster RCNN. J. Intell. Fuzzy Syst. 2021, 41, 6615–6628. [Google Scholar] [CrossRef]
- Gou, C.; Peng, B.; Li, T.R.; Gao, Z.P. Pavement Crack Detection Based on the Improved Faster-RCNN. In Proceedings of the 2019 IEEE 14th International Conference on Intelligent Systems and Knowledge Engineering (ISKE), Dalian, China, 14–16 November 2019. [Google Scholar] [CrossRef]
- Hassan, S.A.; Han, S.H.; Shin, S.Y. Real-Time Road Cracks Detection Based on Improved Deep Convolutional Neural Network. In Proceedings of the 2020 IEEE Canadian Conference on Electrical and Computer Engineering (CCECE), London, ON, Canada, 30 August–2 September 2020. [Google Scholar] [CrossRef]
- Chen, Z.H.; Wang, D.H.; Wang, Y.Z.; Lin, S.Y.; Jia, H.R.; Lin, P.X.; Liu, Y.X.; Chen, L. Research and Implementation of Road Damage Detection Algorithm Based on Object Detection Network. In Proceedings of the 2023 4th International Seminar on Artificial Intelligence, Networking and Information Technology (AINIT), Nanjing, China, 16–18 June 2023. [Google Scholar] [CrossRef]
- Wu, C.G.; Ye, M.; Zhang, J.L.; Ma, Y.C. YOLO-LWnet: A lightweight road damage object detection network for mobile terminal devices. Sensors 2023, 23, 3268. [Google Scholar] [CrossRef] [PubMed]
- Sami, A.A.; Sakib, S.; Deb, K.; Sarker, I.H. Improved YOLOv5-based real-time road pavement damage detection in road infrastructure management. Algorithms 2023, 16, 452. [Google Scholar] [CrossRef]
- Mothilall, D.; Zyl, T.V. Improving Road Damage Maintenance in South Africa Using Deep Learning. In Proceedings of the 2024 International Conference on Artificial Intelligence, Computer, Data Sciences and Applications (ACDSA), Victoria, Seychelles, 1–2 February 2024. [Google Scholar] [CrossRef]
- Zhang, S.Z.; Liu, Z.H.; Wang, K.P.; Huang, W.W.; Li, P. OBC-YOLOv8: An improved road damage detection model based on YOLOv8. PeerJ Comput. Sci. 2025, 11, e2593. [Google Scholar] [CrossRef] [PubMed]
- Maeda, H.; Sekimoto, Y.; Seto, T.; Kashiyama, T.; Omata, H. Road damage detection and classification using deep neural networks with smartphone images. Comput.-Aided Civ. Infrastruct. Eng. 2018, 33, 1127–1141. [Google Scholar] [CrossRef]
- Andika, F.; Bandung, Y. Road Damage Classification Using SSD Mobilenet with Image Enhancement. In Proceedings of the 2023 International Conference on Computer Science, Information Technology and Engineering (ICCoSITE), Jakarta, Indonesia, 16 February 2023. [Google Scholar] [CrossRef]
- Li, S.; Huang, Y. Damage Detection Algorithm Based on Faster-RCNN. In Proceedings of the 2023 5th International Conference on Electronics and Communication, Network and Computer Technology (ECNCT), Guangzhou, China, 18–20 August 2023. [Google Scholar] [CrossRef]
- Alshawabkeh, S.; Wu, L.; Dong, D.J.; Cheng, Y.; Li, L.P. A hybrid approach for pavement crack detection using mask R-CNN and vision transformer model. Comput. Mater. Contin. 2025, 82, 561–577. [Google Scholar] [CrossRef]
- Zou, Q.; Zhang, Z.; Li, Q.Q.; Qi, X.B.; Wang, Q.; Wang, S. Deepcrack: Learning hierarchical convolutional features for crack detection. IEEE Trans. Image Process. 2019, 28, 1498–1512. [Google Scholar] [CrossRef]
- Cheng, J.R.; Xiong, W.; Chen, W.Y.; Gu, Y.; Li, Y.S. Pixel-Level Crack Detection using U-Net. In Proceedings of the IEEE Region 10 Annual International Conference, Jeju, Republic of Korea, 28–31 October 2018. [Google Scholar] [CrossRef]
- Feng, X.R.; Xiao, L.Y.; Li, W.; Pei, L.L.; Sun, Z.Y.; Ma, Z.D.; Shen, H.; Ju, H.Y. Pavement crack detection and segmentation method based on improved deep learning fusion model. Math. Probl. Eng. 2020, 2020, 8515213. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional Networks for Biomedical Image Segmentation. In Proceedings of the Lecture Notes in Computer Science, Munich, Germany, 5–9 October 2015. [Google Scholar] [CrossRef]
- Badrinarayanan, V.; Kendall, A.; Cipolla, R. SegNet: A deep convolutional encoder-decoder architecture for image segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 2481–2495. [Google Scholar] [CrossRef] [PubMed]
- Guan, J.C.; Yang, X.; Ding, L.; Cheng, X.Y.; Lee, V.C.S.; Jin, C. Automated pixel-level pavement distress detection based on stereo vision and deep learning. Autom. Constr. 2021, 129, 103788. [Google Scholar] [CrossRef]
- Dong, J.X.; Liu, J.H.; Wang, N.N.; Fang, H.Y.; Zhang, J.P.; Hu, H.B.; Ma, D. Intelligent segmentation and measurement model for asphalt road cracks based on modified mask R-CNN algorithm. CMES-Comput. Model. Eng. Sci. 2021, 128, 541–564. [Google Scholar] [CrossRef]
- Dong, J.X.; Li, Z.N.; Wang, Z.B.; Wang, N.N.; Guo, W.T.; Ma, D.; Hu, H.B.; Zhong, S. Pixel-level intelligent segmentation and measurement method for pavement multiple damages based on mobile deep learning. IEEE Access 2021, 9, 143860–143876. [Google Scholar] [CrossRef]
- Al-Huda, Z.; Peng, B.; Algburi, R.N.A.; Alfasly, S.; Li, T. Weakly supervised pavement crack semantic segmentation based on multi-scale object localization and incremental annotation refinement. Appl. Intell. 2023, 53, 14527–14546. [Google Scholar] [CrossRef]
- Jiang, S.; Gu, S.Y.; Yan, Z.Y. Pavement crack measurement based on aerial 3d reconstruction and learning-based segmentation method. Meas. Sci. Technol. 2023, 34, 015801. [Google Scholar] [CrossRef]
- Yu, G.; Dong, J.M.; Wang, Y.H.; Zhou, X.L. RUC-Net: A residual-Unet-based convolutional neural network for pixel-level pavement crack segmentation. Sensors 2023, 23, 53. [Google Scholar] [CrossRef]
- Shang, J.; Xu, J.; Zhang, A.A.; Liu, Y.; Wang, K.C.P.; Ren, D.Y.; Zhang, H.; Dong, Z.S.; He, A.Z. Automatic Pixel-level pavement sealed crack detection using Multi-fusion U-Net network. J. Int. Meas. Confed. 2023, 208, 112475. [Google Scholar] [CrossRef]
- Wang, R.D.; Wang, H.; He, Z.H.; Zhu, J.C.; Zuo, H.Q. A novel real-time pixel-level road crack segmentation network. J. Real-Time Image Process. 2024, 21, 76. [Google Scholar] [CrossRef]
- Shim, S.; Kim, J.; Lee, S.-W.; Cho, G.-C. Road surface damage detection based on hierarchical architecture using lightweight auto-encoder network. Autom. Constr. 2021, 130, 103833. [Google Scholar] [CrossRef]
- He, M.; Lau, T.L. CrackHAM: A novel automatic crack detection network based on U-Net for asphalt pavement. IEEE Access 2024, 12, 12655–12666. [Google Scholar] [CrossRef]
- Zim, A.H.; Iqbal, A.; Al-Huda, Z.; Malik, A.; Kuribayashi, M. EfficientCrackNet: A Lightweight Model for Crack Segmentation. In Proceedings of the 2025 IEEE Winter Conference on Applications of Computer Vision(WACV), Tucson, AZ, USA, 28 February–4 March 2025. [Google Scholar] [CrossRef]
- Liu, Y.H.; Yao, J.; Lu, X.H.; Xie, R.P.; Li, L. Deepcrack: A deep hierarchical feature learning architecture for crack segmentation. Neurocomputing 2019, 338, 139–153. [Google Scholar] [CrossRef]
- Zhang, K.G.; Zhang, Y.T.; Cheng, H.D. CrackGAN: Pavement crack detection using partially accurate ground truths based on generative adversarial learning. IEEE Trans. Intell. Transp. Syst. 2021, 22, 1306–1319. [Google Scholar] [CrossRef]
- Hao, Z.X.; Lu, C.; Li, Z.H. Highly accurate and automatic semantic segmentation of multiple cracks in engineered cementitious composites (ECC) under dual pre-modification deep-learning strategy. Cem. Concr. Res. 2023, 165, 107066. [Google Scholar] [CrossRef]
- Hao, Z.X.; Lu, C.; Dong, B.Q.; Li, V.C. 3D crack recognition in Engineered Cementitious Composites (ECC) based on super-resolution reconstruction and semantic segmentation of X-ray Computed Microtomography. Compos. Part B Eng. 2024, 285, 111730. [Google Scholar] [CrossRef]
- JTG 5210-2018; Highway Performance Assessment Standard. Ministry of Transport of the People’s Republic of China: Beijing, China, 2018. (In Chinese)
- Guo, J.T.; Yang, Z.C.; Chu, P.; Cai, J.Y.; Zhou, J.H. Road dynamic target recognition using a low-cost millimeter wave radar. Meas. Sci. Technol. 2025, 36, 036131. [Google Scholar] [CrossRef]
- Chen, X.K.; Ding, M.Y.; Wang, X.D.; Xin, Y.; Mo, S.T.; Wang, Y.H.; Han, S.M.; Luo, P.; Zeng, G.; Wang, J.D. Context Autoencoder for Self-supervised Representation Learning. Int. J. Comput. Vis. 2024, 132, 208–223. [Google Scholar] [CrossRef]
- Zhang, Y.A.; Li, Q. Application of pavement disease detection based on Jetson TX2. Inf. Technol. Informatiz. 2023, 9, 112–115. (In Chinese) [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | Objective | Technical Contribution |
|---|---|---|
| MST [30] (Minimum Spanning Tree) | Crack curve detection in pavement images | Developed CrackTree algorithm for pavement crack pattern recognition |
| AdaBoost [31] | Classification of defective vs. intact pavement surfaces | Reduced workload by pre-filtering images requiring manual inspection |
| Random Forest (RF) [32] | Robust crack detection under complex/noisy conditions | Proposed CrackForest framework with enhanced processing speed |
| RF/SVM/AdaBoost [33] | Concrete bridge deck crack identification | Introduced STRUM classifier with spatial-tuned multi-feature computation |
| RF/SVM/KNN/ANN [8] | Pavement distress (cracks/potholes) classification | Comparative evaluation of algorithms with parameter optimization |
| SVM [34] | Crack type classification (transverse/longitudinal/alligator) | Demonstrated superior performance over BPNN and RBFNN |
| RF/SVM/ANN [35] | Multi-class crack identification | Achieved highest accuracy using SVM classifier |
| Method | Dataset | Target Classes | mAP |
|---|---|---|---|
| Faster RCNN [51] | Smartphone-captured images | 6 classes: transverse cracks, longitudinal cracks, potholes, alligator cracks, intact manholes, damaged manhole surroundings | 0.963 |
| Faster RCNN [52] | UAV-captured images | 3 classes: cracks, potholes, rutting | 0.926 |
| Faster RCNN [53] | MIT-CHN-ORR dataset | 4 classes: linear cracks, nonlinear cracks, alligator cracks, general distress | 0.991 |
| Faster RCNN [54] | Custom HTD dataset (Road Inspection Agency) | 1 class: cracks | 0.731 |
| YOLOv3-Tiny (Lightweight) [55] | HD camera images | 1 class: cracks | 0.900 |
| YOLOv5 [56] | RDD2020 | 4 classes: transverse cracks, longitudinal cracks, alligator cracks, potholes | 0.548 |
| YOLO-LWNet [57] (Lightweight) | RDD2020 | 4 classes: transverse cracks, longitudinal cracks, alligator cracks, potholes | 0.497 |
| YOLOv5 [58] | RDD2022 | 4 classes: transverse cracks, longitudinal cracks, alligator cracks, potholes | 0.678 |
| YOLOv5s [59] | RDD2022 (India subset) | 4 classes: transverse cracks, longitudinal cracks, alligator cracks, potholes | 0.380 |
| YOLOv8n [60] | RDD2022 (China subset) | 4 classes: transverse cracks, longitudinal cracks, alligator cracks, potholes | 0.860 |
| SSD [61] | RDD2018 | 8 classes: wheel-marked longitudinal cracks, construction joint cracks, evenly spaced transverse cracks, etc. | 0.770 |
| SSD [62] | RDD2020 | 4 classes: transverse cracks, longitudinal cracks, alligator cracks, potholes | 0.730 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lv, Z.; Hao, Z.; Zhu, Y.; Lu, C. A Review on Automated Detection and Identification Algorithms for Highway Pavement Distress. Appl. Sci. 2025, 15, 6112. https://doi.org/10.3390/app15116112
Lv Z, Hao Z, Zhu Y, Lu C. A Review on Automated Detection and Identification Algorithms for Highway Pavement Distress. Applied Sciences. 2025; 15(11):6112. https://doi.org/10.3390/app15116112
Chicago/Turabian StyleLv, Zhenglong, Zhexin Hao, Yuhan Zhu, and Cong Lu. 2025. "A Review on Automated Detection and Identification Algorithms for Highway Pavement Distress" Applied Sciences 15, no. 11: 6112. https://doi.org/10.3390/app15116112
APA StyleLv, Z., Hao, Z., Zhu, Y., & Lu, C. (2025). A Review on Automated Detection and Identification Algorithms for Highway Pavement Distress. Applied Sciences, 15(11), 6112. https://doi.org/10.3390/app15116112