
Research on Multi-Step Prediction of Pipeline Corrosion Rate Based on Adaptive MTGNN Spatio-Temporal Correlation Analysis

Abstract
1. Introduction
- (1)
- Dynamic spatio-temporal graph modeling framework: A multi-feature spatio-temporal correlation analysis framework based on adaptive MTGNN is proposed, which innovatively introduces the dynamic graph learning mechanism into the field of pipeline corrosion prediction. The spatial heterogeneity of pipeline monitoring points is modeled by the adaptive adjacency matrix, and multi-scale temporal dynamic features are captured by combining with time domain convolution, which breaks through the limitation of the traditional temporal model that ignores the spatial correlation.
- (2)
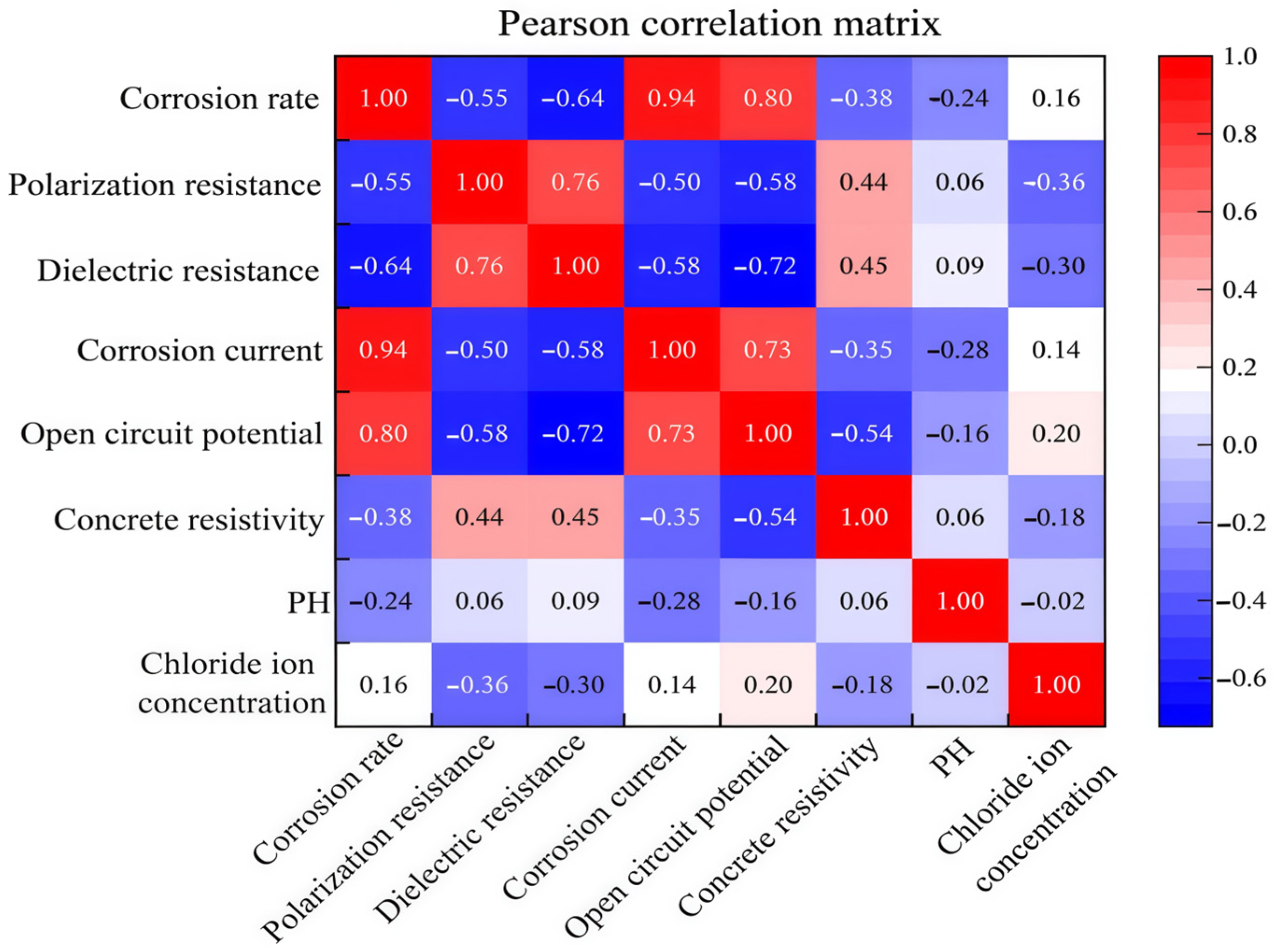
- Multi-physical feature fusion: In this study, strong correlation auxiliary features such as corrosion current and concrete resistivity are integrated by carrying out correlation coefficient analysis, which significantly improves the model’s ability to characterize the coupling effects of complex environments compared with a single feature.
- (3)
- Progressive training strategy: A “chunked progressive” training strategy is proposed to expand the prediction horizons in phases, which effectively alleviates the error accumulation problem in multi-step prediction.
- (4)
- Verification of cross-engineering generalization capability: In view of the shortcomings of existing studies that rely on single-system data, cross-engineering tests on prestressed steel-cylinder concrete pipelines in coastal areas are added. Experiments show that the prediction framework proposed in this paper has good adaptability to similar projects.
2. Research Methods and Principles
2.1. Graph-Based Modeling of Multivariate Time Series
2.2. Graph Learning Layer & Graph Convolution Module
2.3. Temporal Convolution Module
2.4. Skip Connection Layer & Output Module
3. Multi-Step Prediction Framework for Multivariate Corrosion Information Based on Adaptive MTGNN
3.1. Brief Description of the Corrosion Rate Prediction Problem
- (1)
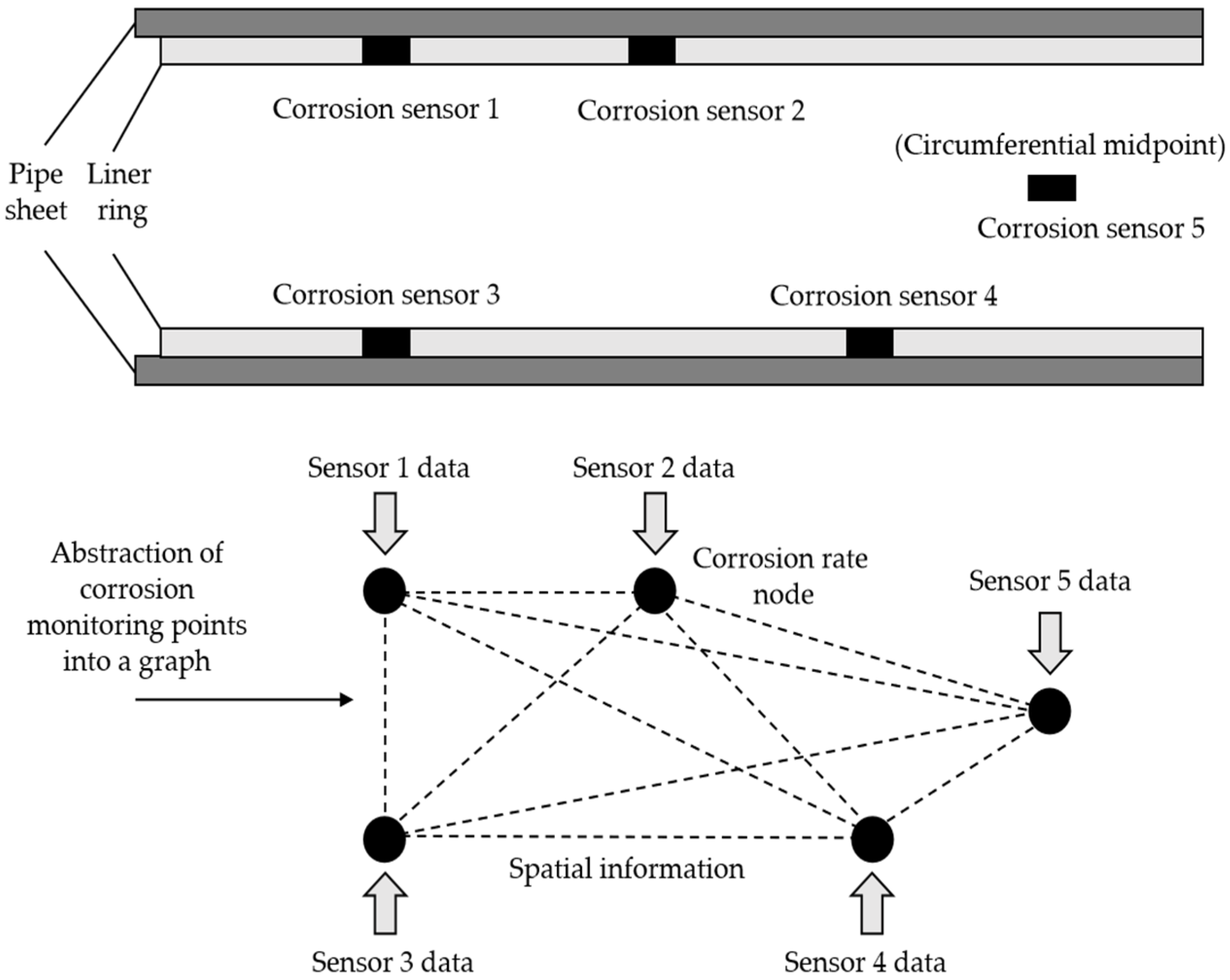
- Generate initial node embedding vectors based on the physical location coordinates of the monitoring points and multi-feature data as input to the graph learning layer.
- (2)
- Calculate the similarity between nodes through a two-branch structure and use the graph learning layer to generate a dynamic adjacency matrix that captures the implicit spatial dependencies between nodes.
- (3)
- A top-k strategy is used to select the critical neighbors of each node, and non-critical connections are set to zero to optimize the matrix sparsity and reduce the computational complexity.
- (4)
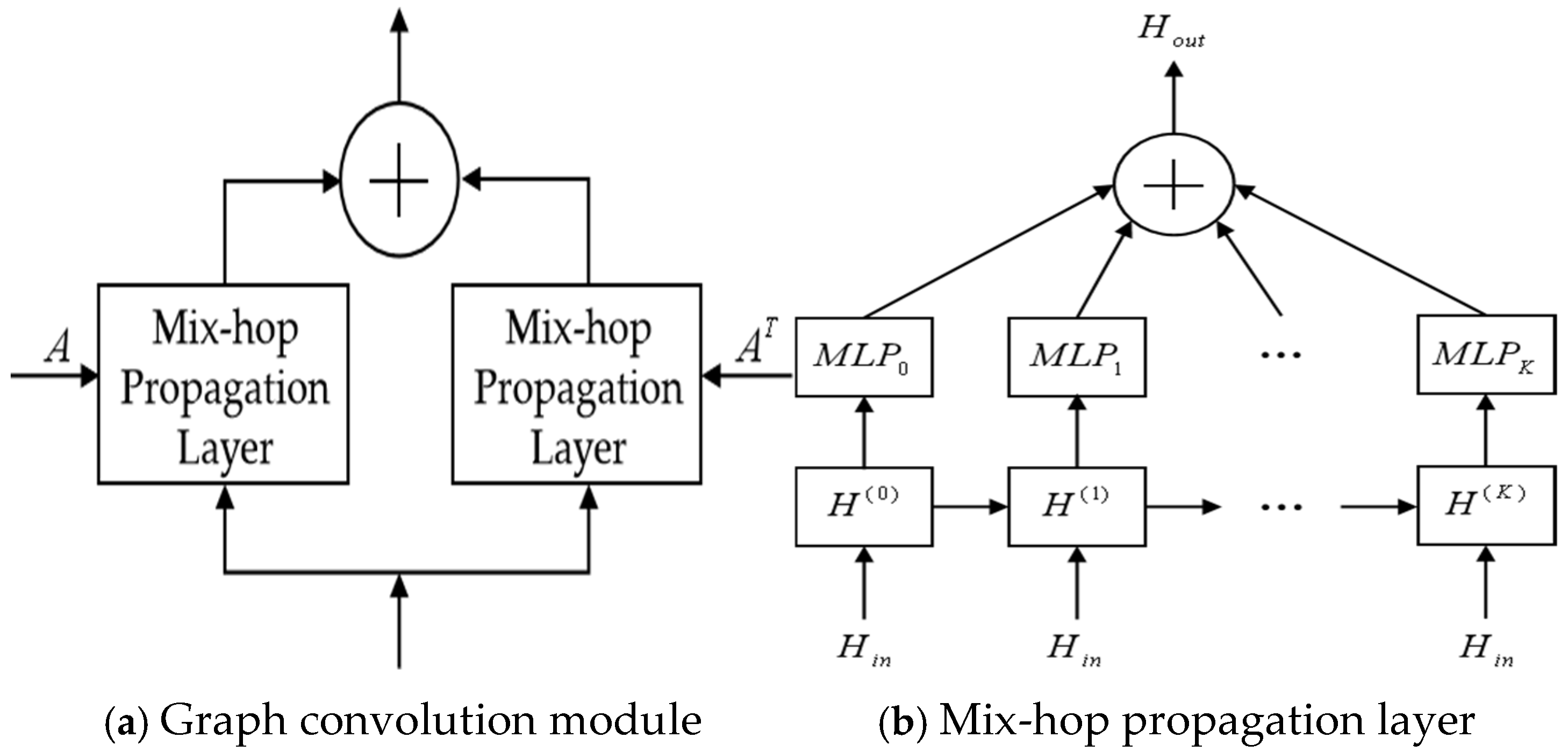
- Input the dynamic adjacency matrix into the graph convolution module and integrate the multi-feature information of the node itself and its neighbors through the mix-hop propagation layer to generate the spatial feature representation.
- (5)
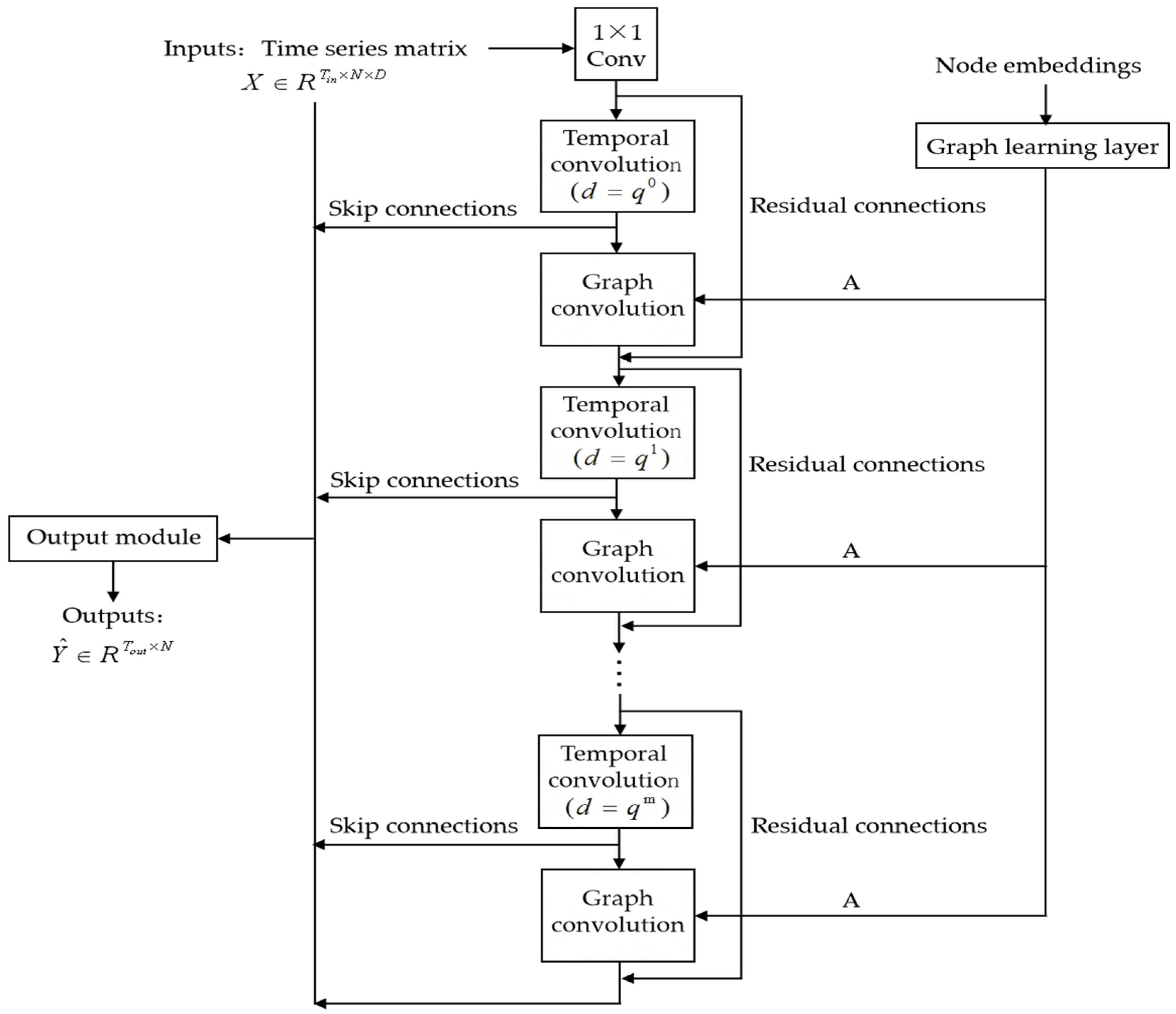
- Alternately stack the graph convolution module and the temporal convolution module to extract spatial and temporal features, respectively, retain the original information through residual connections, skip connections to transfer features across layers, and finally output the predicted corrosion rate that integrates spatial and temporal information.
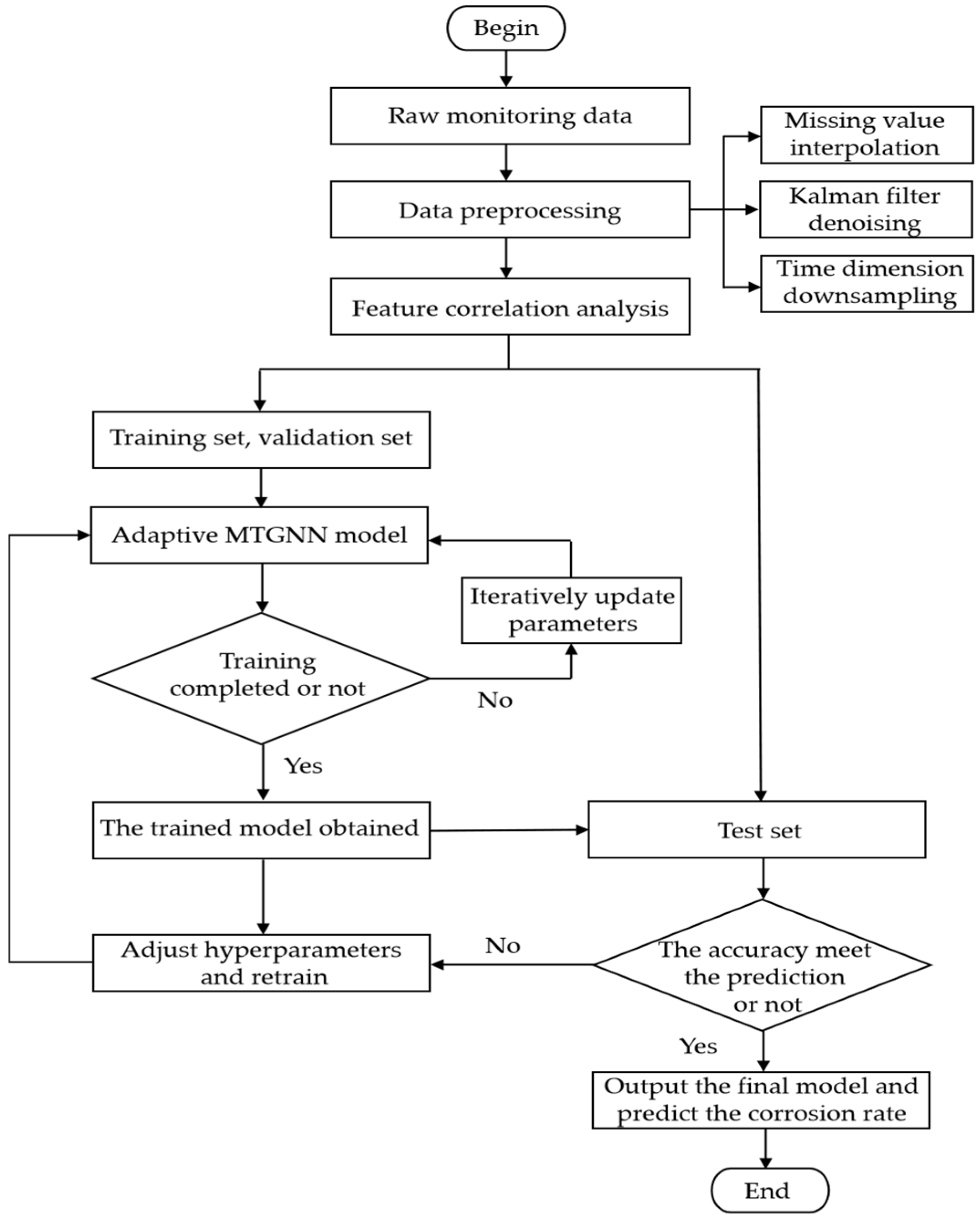
3.2. Prediction Process
3.3. Evaluation Index
3.4. Comparison Models
4. Engineering Example
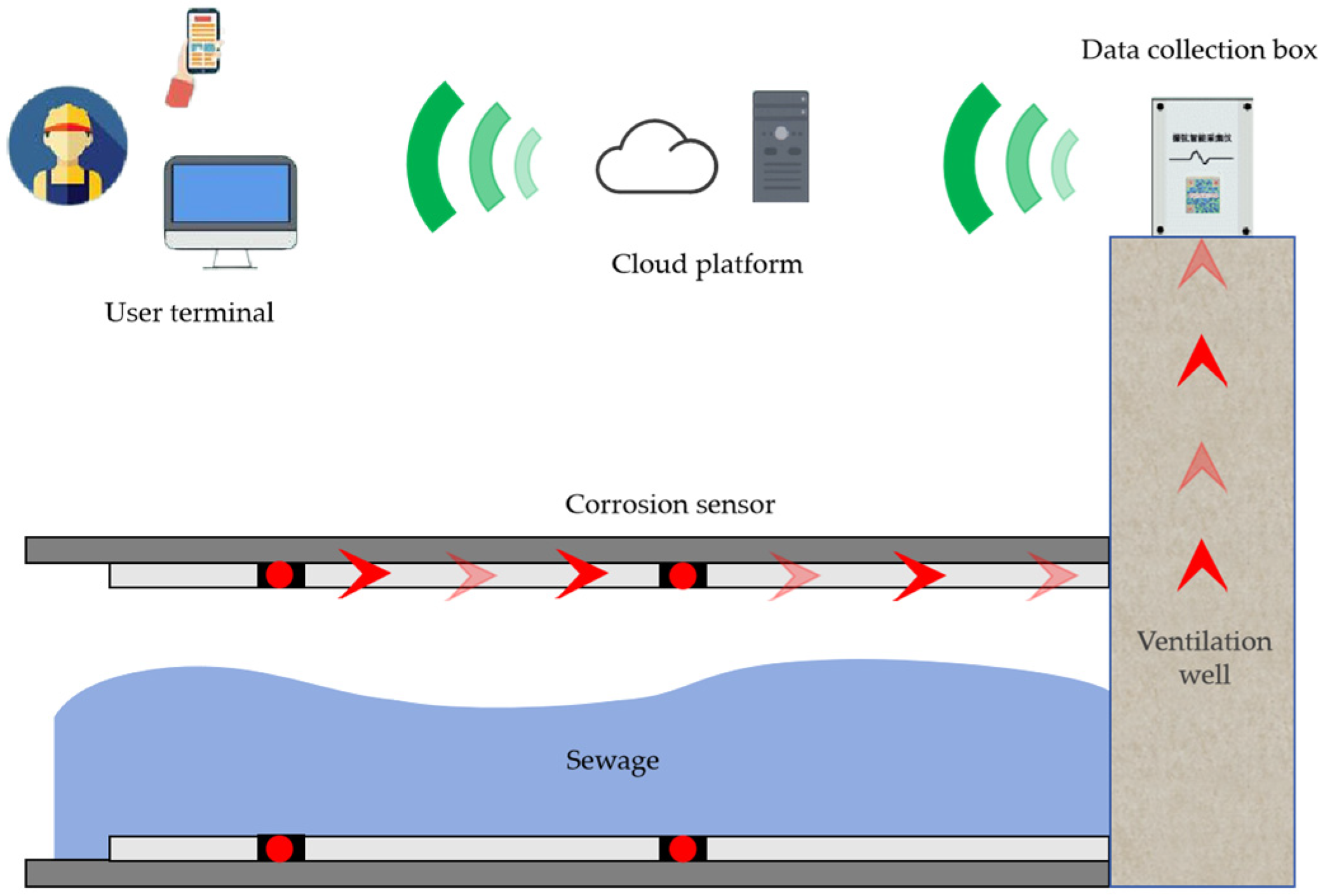
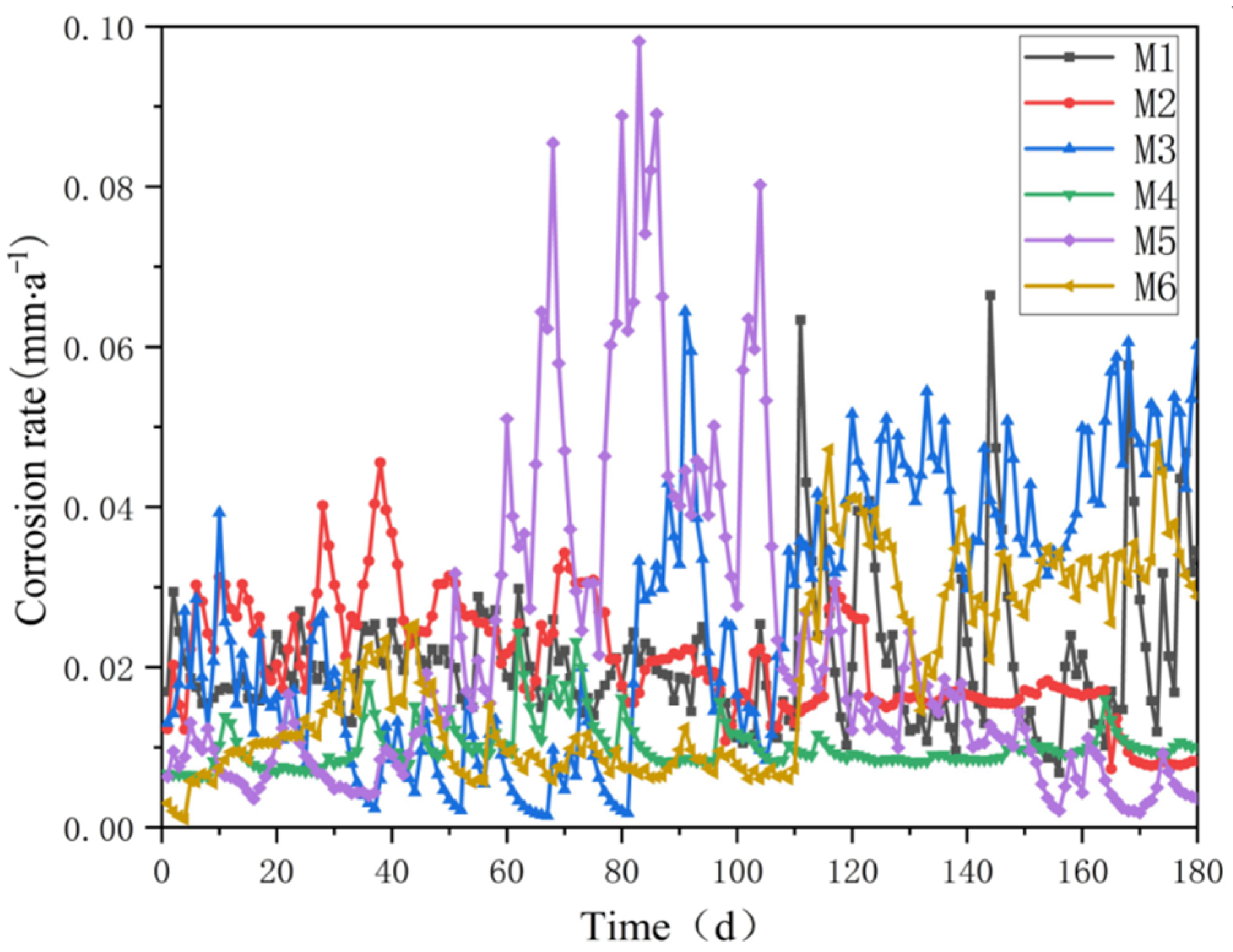
4.1. Overview of the Project
4.2. Data Preprocessing and Model Settings
4.2.1. Missing Value Interpolation
4.2.2. Kalman Filter Denoising
4.2.3. Time Dimension Downsampling
4.2.4. Feature Correlation Analysis
4.2.5. Division and Normalization of Dataset
4.2.6. Model Parameters Setting
4.3. Results and Analysis
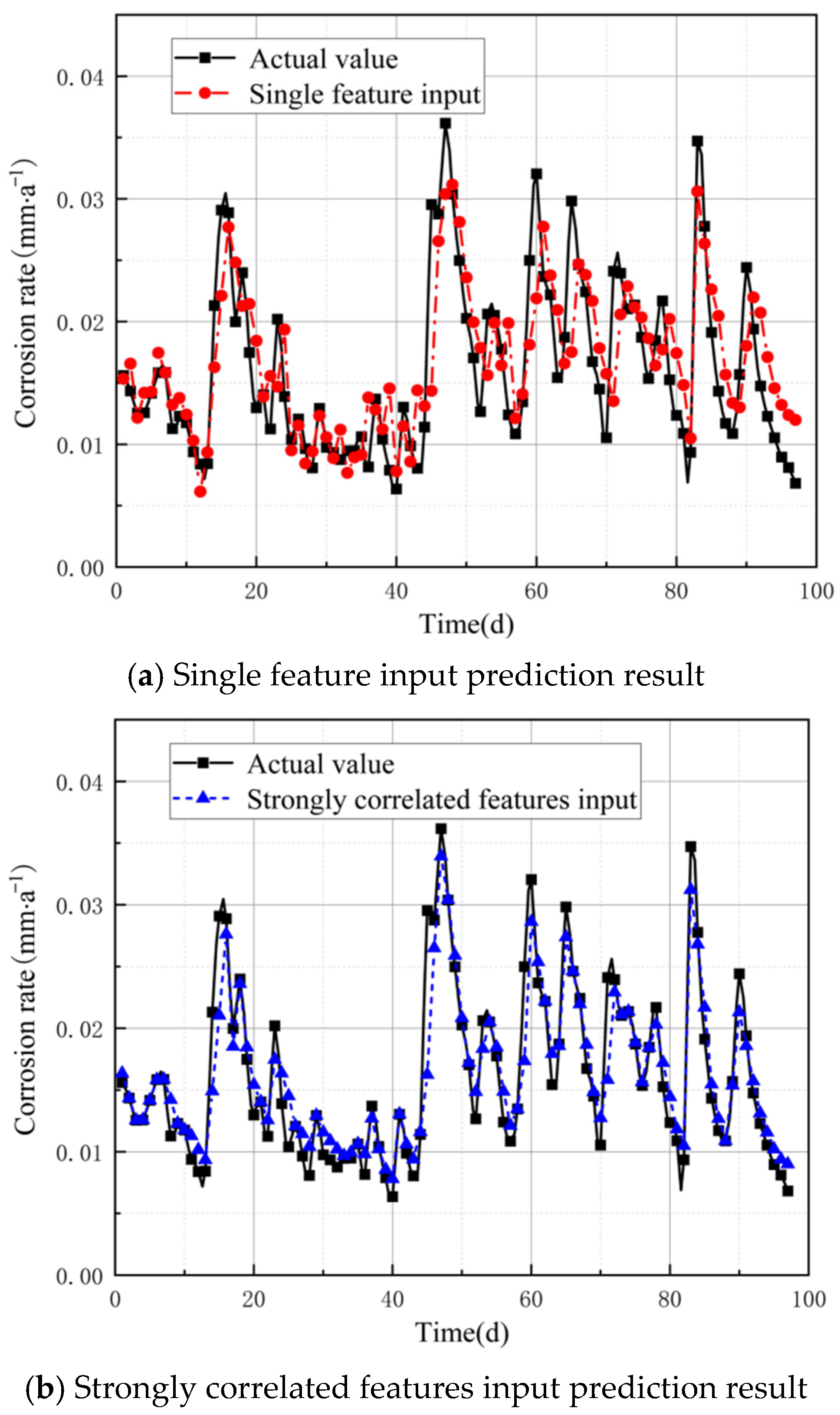
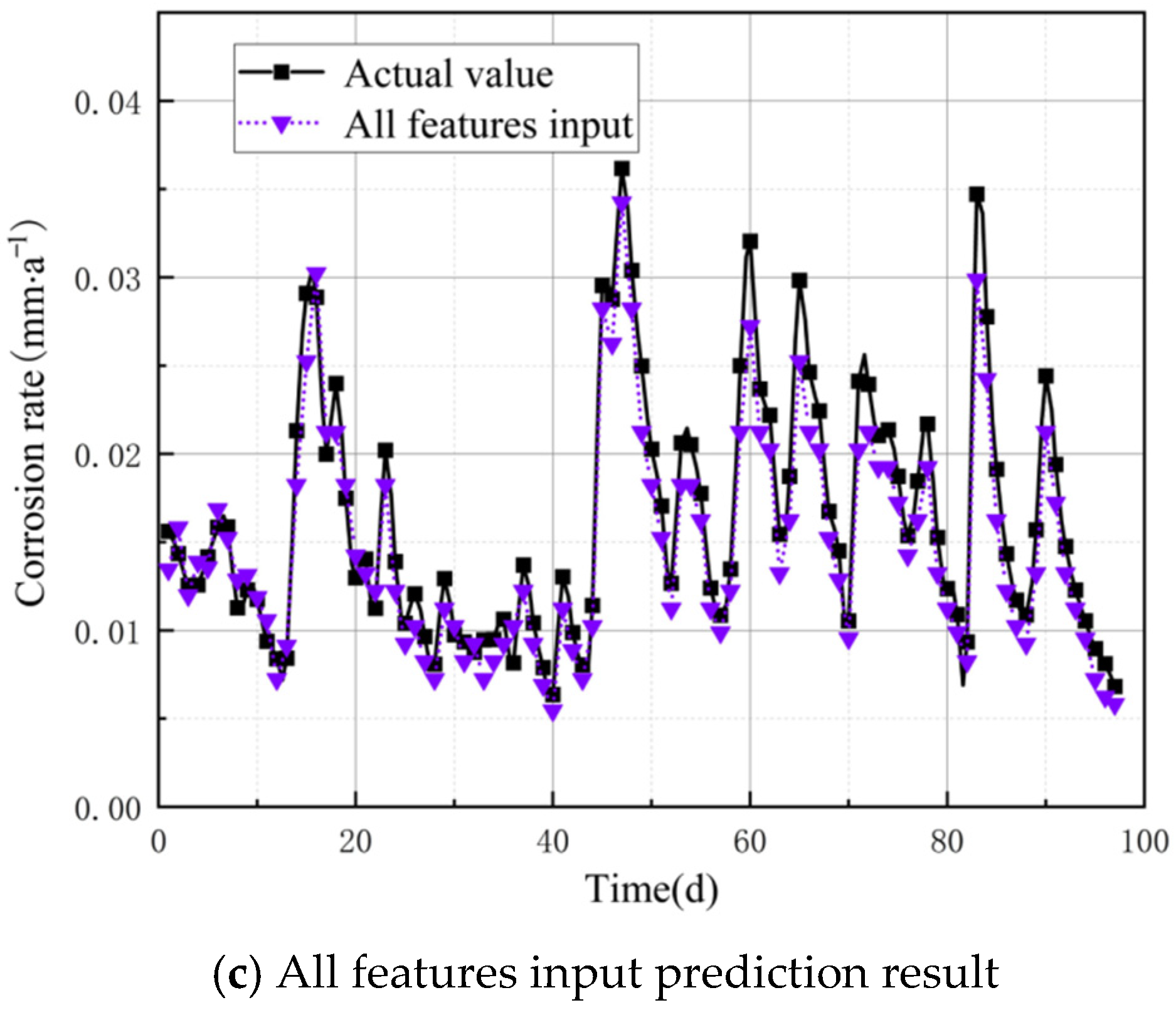
4.3.1. Prediction Results and Analysis Under Different Combinations of Input Features
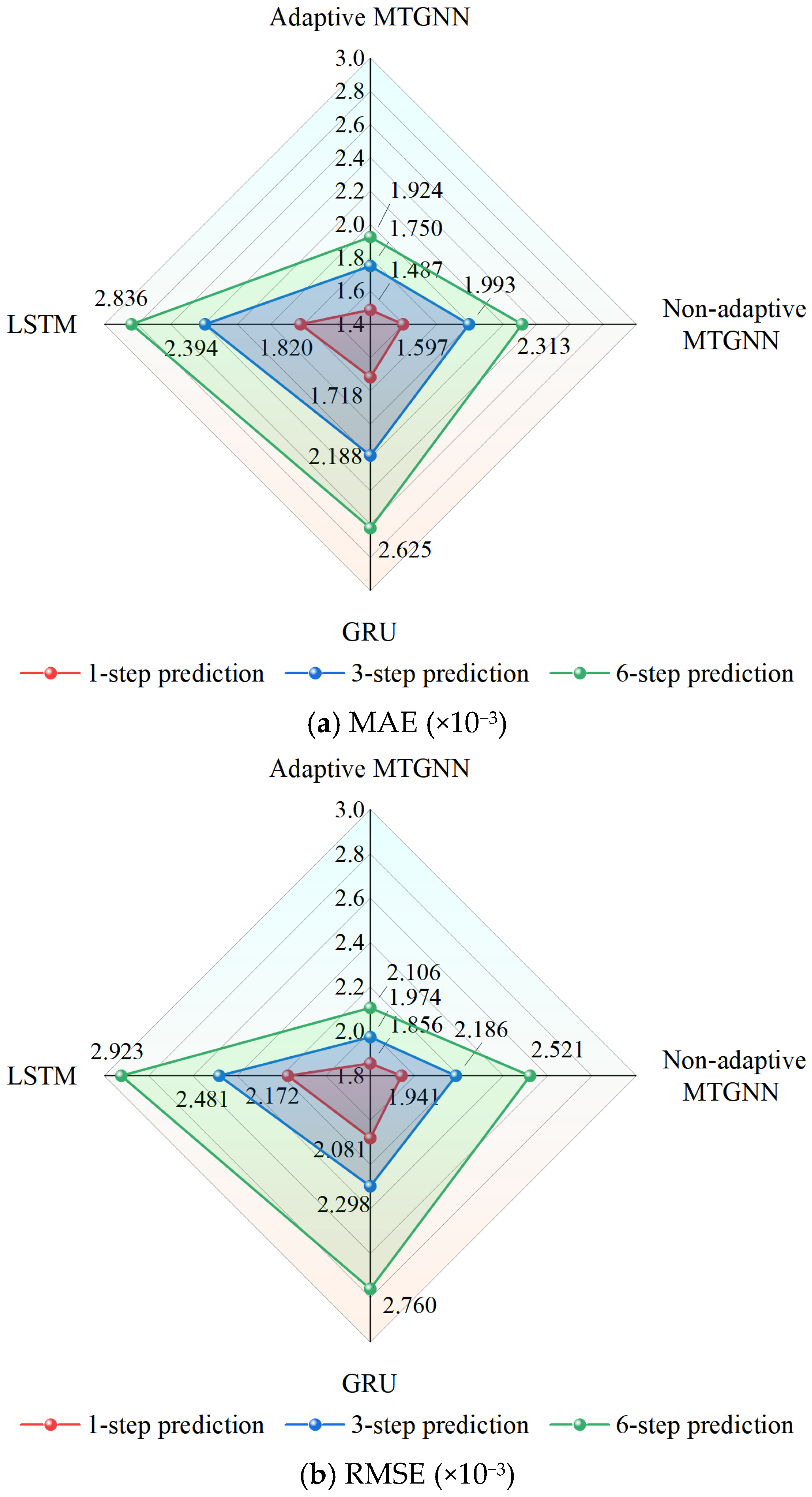
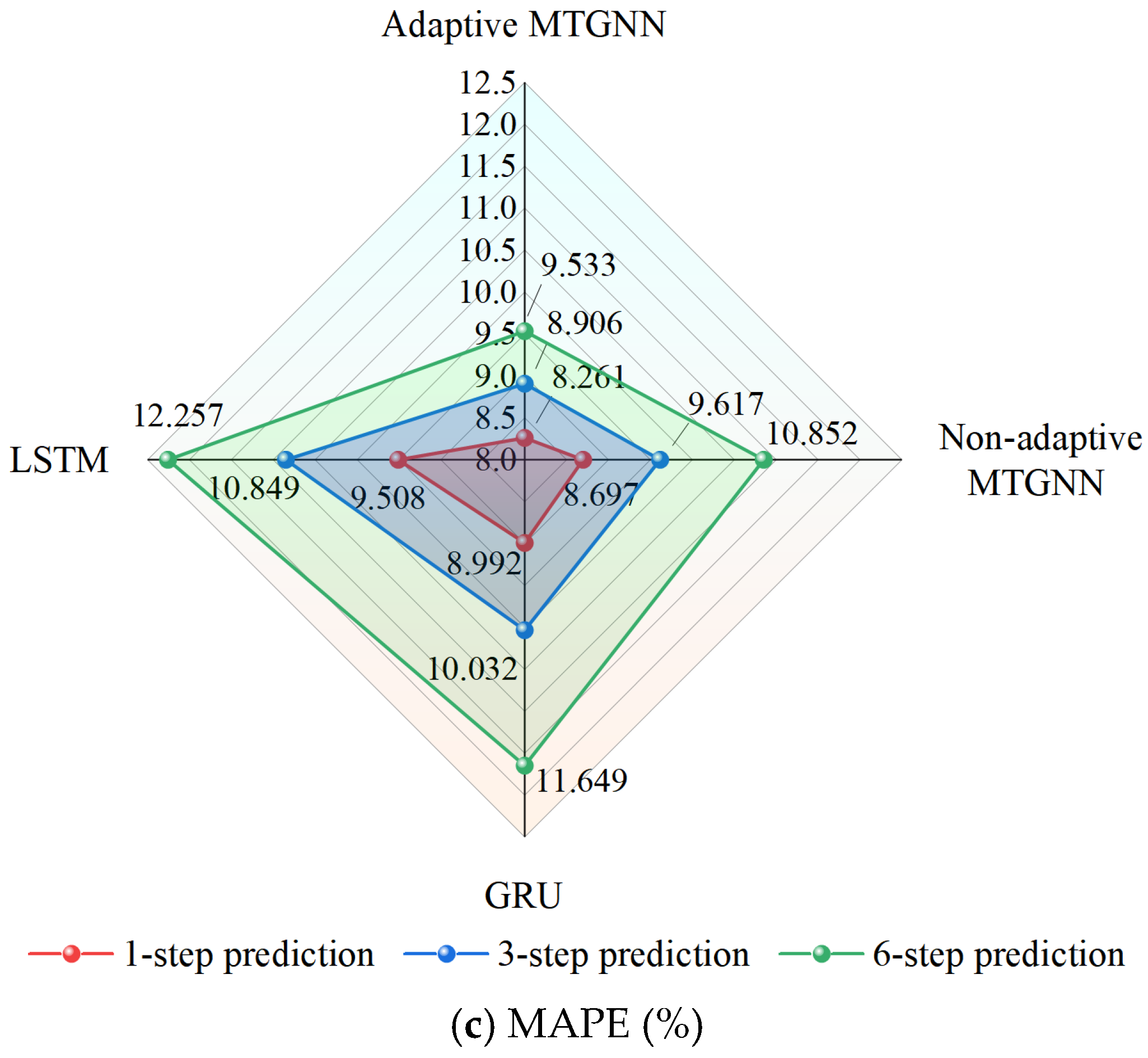
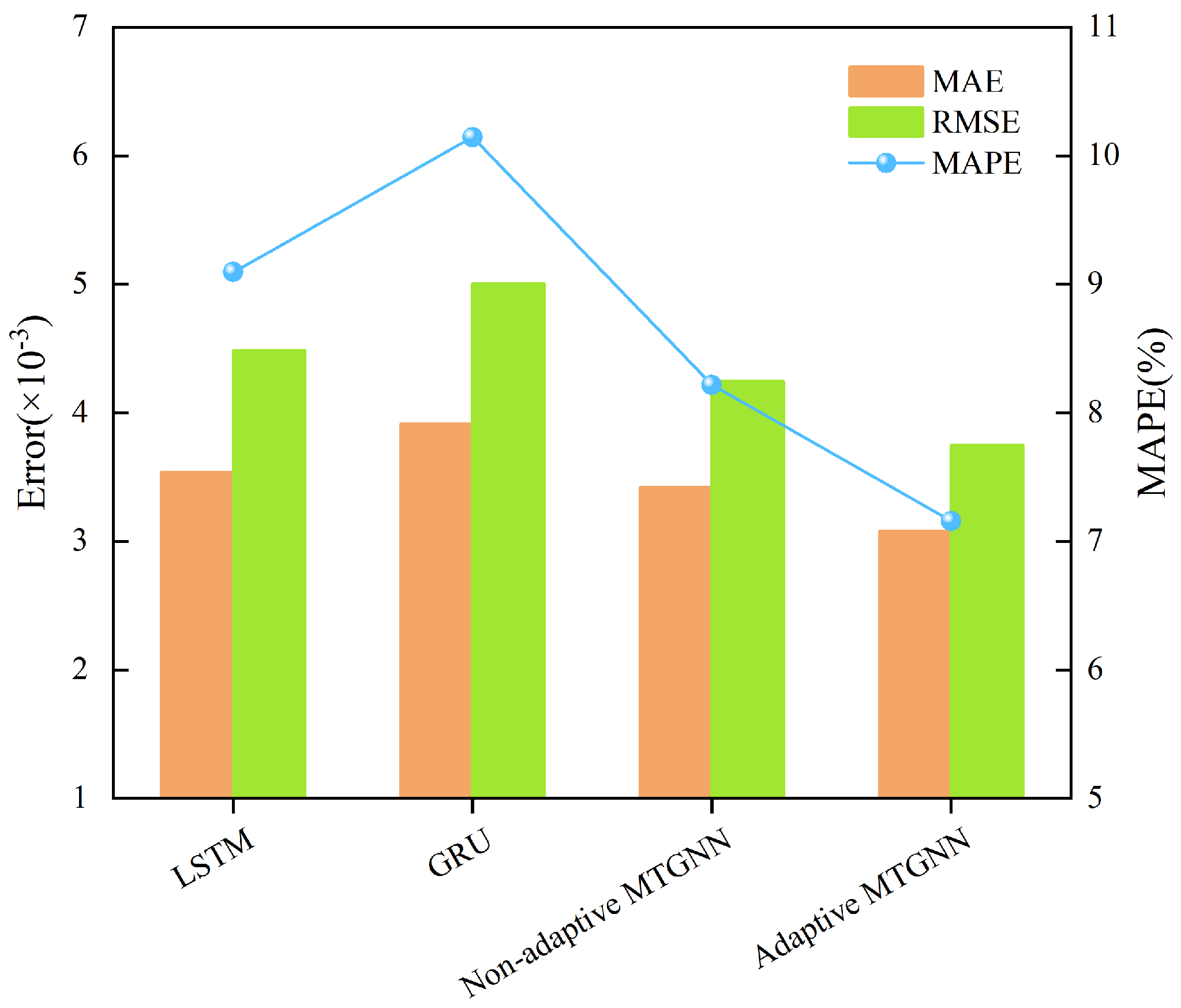
4.3.2. Comparative Analysis of the Performance of Different Prediction Models
4.4. Generalization Performance Verification
5. Conclusions
- (1)
- By introducing strongly correlated features in the node embedding of the input layer, the prediction performance of the model is substantially improved compared with the single feature input and all feature input. Adaptive MTGNN captures the synergistic temporal patterns among multiple features in an end-to-end manner and is able to more accurately reflect the changing trends of time series. This result demonstrates the superior ability of adaptive MTGNN in modeling complex cross-variate information and effectively utilizing auxiliary features.
- (2)
- The deep learning model based on adaptive MTGNN to construct spatio-temporal graphs can extract the neighborhood aggregated spatio-temporal information and adaptively learn the internal graph structure through graph convolution and temporal convolution without the need for prior knowledge of edges. The experimental results show that the model increases the extraction of spatial features compared with the traditional time series prediction methods, which can achieve higher prediction accuracy and provide a reference for similar pipeline internal corrosion prediction problems.
- (3)
- In this study, a “chunked progressive” training strategy is used to decompose the multi-step prediction task into progressive sub-intervals, which enables the model to perform well in short-term prediction. However, there is still room for improvement in long-term prediction accuracy. Future research can introduce attention mechanisms or Transformer architectures to dynamically allocate importance to different time steps, alleviating error accumulation.
- (4)
- The fixed-size dilated convolution kernels used in this paper may lack flexibility when dealing with a large amount of non-stationary corrosion fluctuation data, making it difficult to adaptively adjust to match heterogeneous temporal features in complex environments. Future work will explore dynamic adjustable convolution kernel mechanisms, optimizing kernel size selection by integrating data-driven and physical prior knowledge, while combining lightweight strategies to reduce computational costs, thereby enhancing the model’s generalization ability to nonlinear spatio-temporal dynamics and engineering applicability.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, E.B.; Wang, N.C.; Wang, K.L.; Zhang, J. Reasons and countermeasures for corrosion and leakage of sewage pipelines in public works. Total Corros. Control 2023, 37, 96–100+112. [Google Scholar] [CrossRef]
- Zhao, L.; Qi, G.; Dai, Y.; Ou, H.X.; Xing, Z.X.; Zhao, L.; Yan, Y.F. Integrated dynamic risk assessment of buried gas pipeline leakages in urban areas. J. Loss Prev. Process Ind. 2023, 83, 105049. [Google Scholar] [CrossRef]
- Wang, Y.J.; Su, F.; Guo, Y.; Yang, H.L.; Ye, Z.J.; Wang, L.B. Predicting the microbiologically induced concrete corrosion in sewer based on XGBoost algorithm. Case Stud. Constr. Mater. 2022, 17, e01649. [Google Scholar] [CrossRef]
- Wang, Y.C.; Xu, L.Y.; Sun, J.L.; Cheng, Y.F. Mechano-electrochemical interaction for pipeline corrosion: A review. J. Pipeline Sci. Eng. 2021, 1, 1–16. [Google Scholar] [CrossRef]
- Mahdi, S.; Mojtaba, M.; Xue, Y.D.; Zhang, Y.; Wu, C.L. Time-Variant System Reliability Analysis of Concrete Sewer Pipes under Corrosion Considering Multiple Failure Modes. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2023, 9, 04023002. [Google Scholar] [CrossRef]
- Zhu, Y.S.; Cai, K.; Hu, B.W.; Xia, Y.Q.; Hu, T.Y.; Huang, Y. Research Progress on Characteristics and Prediction Modelsof Carbon Dioxide Induced Corrosion forSubmarine Pipelines. J. Chin. Soc. Corros. Prot. 2023, 43, 1225–1236. [Google Scholar] [CrossRef]
- Gao, X.L.; Wang, L.N.; Liu, W. Study on Internal Corrosion of Concrete Sewer Pipelines. Struct. Eng. 2020, 36, 71–79. [Google Scholar] [CrossRef]
- Wu, Z.; Wang, Q.; Hu, J.X.; Tang, Y.; Zhang, Y.N. Integrating model-driven and data-driven methods for fast state estimation. Int. J. Electr. Power Energy Syst. 2022, 139, 107982. [Google Scholar] [CrossRef]
- Li, B.H.; Wang, H.Y.; Li, J.; Lu, G.Q. Integrating model-driven and data-driven methods for under-frequency load shedding control. Electr. Power Syst. Res. 2025, 238, 111103. [Google Scholar] [CrossRef]
- Wang, D.; Zou, Y.F.; Geng, H.J. Prediction of Corrosion Rate of Oil and Gas Pipelines Based on Grey System Theory. Total Corros. Control 2024, 38, 162–167. [Google Scholar] [CrossRef]
- Luo, Z.S.; Yao, M.Y.; Luo, J.H.; Wang, X.W. Prediction Model of External Corrosion Rate of Submarine Pipeline Based on PCA-BAS-PPR. Mater. Prot. 2019, 52, 64–69+74. [Google Scholar] [CrossRef]
- Bilal, M.; Idris, O.; Serdar, D.; Syuhaida, I.; Hussaini, W. Influence of Artificial Intelligence in Civil Engineering toward Sustainable Development—A Systematic Literature Review. Appl. Syst. Innov. 2021, 4, 52. [Google Scholar] [CrossRef]
- Aref, A.; Gholamreza, N.; Shahin, G.; Hossein, H. Machine-Learning Applications in Structural Response Prediction: A Review. Pract. Period. Struct. Des. Constr. 2024, 29, 03124002. [Google Scholar] [CrossRef]
- Vagelis, P. A Glimpse into the Future of Civil Engineering Education: The New Era of Artificial Intelligence, Machine Learning, and Large Language Models. J. Civ. Eng. Educ. 2025, 151, 02525001. [Google Scholar] [CrossRef]
- Sun, Z.; Li, Y.L.; Li, Y.Q.; Su, L.; He, W.D. Investigation on compressive strength of coral aggregate concrete: Hybrid machine learning models and experimental validation. J. Build. Eng. 2024, 82, 108220. [Google Scholar] [CrossRef]
- Hu, J.; Xia, C.J.; Wu, J.H.; Dong, F.H. Estimating the pile-bearing capacity utilizing a reliable machine-learning approach. Multisc. Multidiscip. Model. Exp. Des. 2025, 8, 217. [Google Scholar] [CrossRef]
- Qu, Z.H.; Tang, D.Z.; Hu, L.H.; Chen, H.J.; Li, H.X.; Jia, H.Y.; Wang, Z.; Zhang, L. Prediction of H2S Corrosion Products and Corrosion Rate Based on Optimized Random Forest. Surf. Technol. 2020, 49, 42–49. [Google Scholar] [CrossRef]
- Li, X.H.; Jia, R.C.; Zhang, R.R.; Yang, S.Y.; Chen, G.M. A KPCA-BRANN based data-driven approach to model corrosion degradation of subsea oil pipelines. Reliab. Eng. Syst. Saf. 2022, 219, 108231. [Google Scholar] [CrossRef]
- Luo, Z.S.; Du, D.; Luo, J.H.; Wang, X.W. Research on the effectiveness of a combined model for predicting the corrosion rate of pipelines—CNN and LSTM models based on attention mechanism enhancement. J. Saf. Environ. 2024, 24, 4263–4269. [Google Scholar] [CrossRef]
- Canonaco, G.; Roveri, M.; Alippi, C.; Podenzani, F.; Bennardo, A.; Conti, M.; Mancini, N. A transfer-learning approach for corrosion prediction in pipeline infrastructures. Appl. Intell. 2021, 52, 7622–7637. [Google Scholar] [CrossRef]
- Wang, G.Q.; Wang, C.Q.; Shi, L.H. Corrosion Rate Prediction for Submarine Multiphase Flow Pipelines Based on Multi-Layer Perceptron. Atmosphere 2022, 13, 1833. [Google Scholar] [CrossRef]
- Saputra, A.N.; Riza, S.L.; Setiawan, A.; Hamidah, I. A Systematic Review for Classification and Selection of Deep Learning Methods. Decis. Anal. J. 2024, 12, 100489. [Google Scholar] [CrossRef]
- Wang, H.; Wang, B.L.; Cui, C.X. Deep Learning Methods for Vibration-Based Structural Health Monitoring: A Review. Iran. J. Sci. Technol. Trans. Civ. Eng. 2023, 48, 1837–1859. [Google Scholar] [CrossRef]
- Chen, Z.; Yu, J.M.; Bindiganavile, V.; Yi, C.F.; Shi, C.J.; Hu, X. Time and spatially dependent transient competitive antagonism during the 2-D diffusion-reaction of combined chloride-sulphate attack upon concrete. Cem. Concr. Res. 2022, 154, 106724. [Google Scholar] [CrossRef]
- Baji, H. Stochastic modelling of concrete cover cracking considering spatio-temporal variation of corrosion. Cem. Concr. Res. 2020, 133, 106081. [Google Scholar] [CrossRef]
- Li, Z.; Ding, S.W.; Liu, X.; Yang, X.H.; Wei, L.X. Numerical Analysis of Structural Performance Degradation of Sewage Shield Tunnel Segment. Tunnel Constr. 2016, 36, 1207–1215. [Google Scholar]
- Liu, B.S.; Tong, Y.; Gao, Y.X.; Liu, H.B.; Wu, M.N.; Bai, Y. Research Progress on Microbial Corrosion of Concrete in Sewage Pipelines. Corros. Prot. 2022, 43, 7–13. [Google Scholar]
- Wang, Z.W. Analysis on Corrosion Rule and Mechanical Properties of Underground Circular Concrete Drainage Pipe. Master’s Thesis, Chongqing University, Chongqing, China, 2012. [Google Scholar]
- Wu, Z.H.; Pan, S.R.; Long, G.D.; Jiang, J.; Chang, X.J.; Zhang, C.Q. Connecting the Dots: Multivariate Time Series Forecasting with Graph Neural Networks. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Virtual, 23–27 August 2020; pp. 753–763. [Google Scholar] [CrossRef]
- Bengio, Y.; Louradour, J.; Collobert, R.; Weston, J. Curriculum Learning. In Proceedings of the 26th Annual International Conference on Machine Learning (ICML), Montreal, QC, Canada, 14–18 June 2009; pp. 41–48. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Input Features | Instructions |
|---|---|---|
| 1 | CR | Single feature |
| 2 | CR, PR, DR, CC, OCP, RT | Strongly correlated features |
| 3 | CR, PR, DR, CC, OCP, RT, PH, Cl- | All features |
| Input Features | MAE (×10−3) | RMSE (×10−3) | MAPE (%) |
|---|---|---|---|
| CR | 1.948 | 2.512 | 14.225 |
| CR, PR, DR, CC, OCP, RT | 1.507 | 2.051 | 9.690 |
| CR, PR, DR, CC, OCP, RT, PH, Cl- | 1.801 | 2.169 | 11.216 |
| Evaluation Index | Prediction Model | Prediction Step Size | ||
|---|---|---|---|---|
| 1 | 3 | 6 | ||
| MAE (×10−3) | Adaptive MTGNN | 1.487 | 1.750 | 1.924 |
| Non-adaptive MTGNN | 1.597 | 1.993 | 2.313 | |
| GRU | 1.718 | 2.188 | 2.625 | |
| LSTM | 1.820 | 2.394 | 2.836 | |
| RMSE (×10−3) | Adaptive MTGNN | 1.856 | 1.974 | 2.106 |
| Non-adaptive MTGNN | 1.941 | 2.186 | 2.521 | |
| GRU | 2.081 | 2.298 | 2.760 | |
| LSTM | 2.172 | 2.481 | 2.923 | |
| MAPE (%) | Adaptive MTGNN | 8.261 | 8.906 | 9.533 |
| Non-adaptive MTGNN | 8.697 | 9.617 | 10.852 | |
| GRU | 8.992 | 10.032 | 11.649 | |
| LSTM | 9.508 | 10.849 | 12.257 | |
| Evaluation Index | Prediction Model | Prediction Step Size | ||
|---|---|---|---|---|
| 1 | 3 | 6 | ||
| MAE (×10−3) | Non-adaptive MTGNN | 6.59 | 12.12 | 16.82 |
| GRU | 13.44 | 20.01 | 26.70 | |
| LSTM | 18.30 | 26.90 | 32.16 | |
| RMSE (×10−3) | Non-adaptive MTGNN | 4.38 | 9.70 | 16.46 |
| GRU | 10.81 | 14.10 | 23.70 | |
| LSTM | 14.55 | 20.44 | 27.95 | |
| MAPE (%) | Non-adaptive MTGNN | 5.01 | 7.39 | 12.15 |
| GRU | 8.13 | 11.22 | 18.01 | |
| LSTM | 13.12 | 17.90 | 22.22 | |
| Prediction Model | MAE (×10−3) | RMSE (×10−3) | MAPE (%) |
|---|---|---|---|
| LSTM | 3.538 | 4.484 | 9.093 |
| GRU | 3.916 | 5.003 | 10.144 |
| Non-adaptive MTGNN | 3.419 | 4.245 | 8.216 |
| Adaptive MTGNN | 3.081 | 3.780 | 7.157 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, M.; Qin, S. Research on Multi-Step Prediction of Pipeline Corrosion Rate Based on Adaptive MTGNN Spatio-Temporal Correlation Analysis. Appl. Sci. 2025, 15, 5686. https://doi.org/10.3390/app15105686
Sun M, Qin S. Research on Multi-Step Prediction of Pipeline Corrosion Rate Based on Adaptive MTGNN Spatio-Temporal Correlation Analysis. Applied Sciences. 2025; 15(10):5686. https://doi.org/10.3390/app15105686
Chicago/Turabian StyleSun, Mingyang, and Shiwei Qin. 2025. "Research on Multi-Step Prediction of Pipeline Corrosion Rate Based on Adaptive MTGNN Spatio-Temporal Correlation Analysis" Applied Sciences 15, no. 10: 5686. https://doi.org/10.3390/app15105686
APA StyleSun, M., & Qin, S. (2025). Research on Multi-Step Prediction of Pipeline Corrosion Rate Based on Adaptive MTGNN Spatio-Temporal Correlation Analysis. Applied Sciences, 15(10), 5686. https://doi.org/10.3390/app15105686