

Parameter-Matching Multi-Objective Optimization for Diesel Engine Torsional Dampers


Abstract
1. Introduction
2. Research Methodology
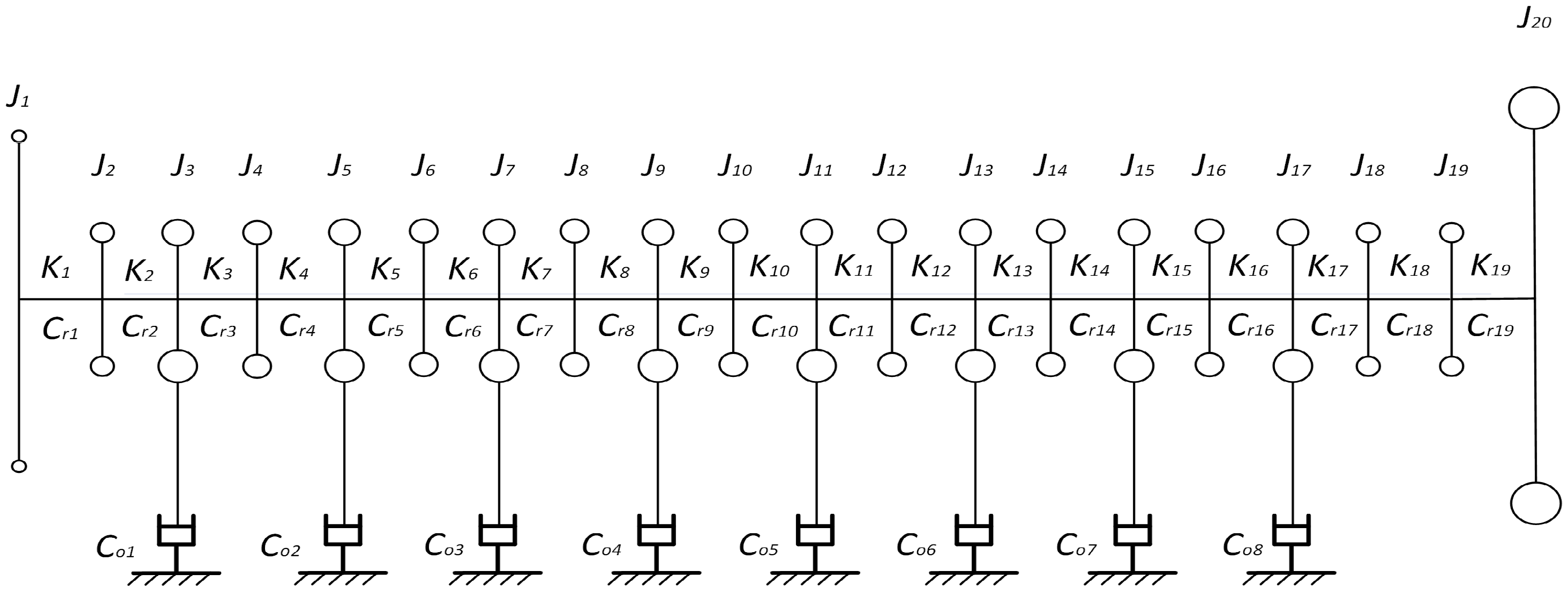
2.1. Torsional Vibration Calculation Model
2.2. Free Vibration Calculation
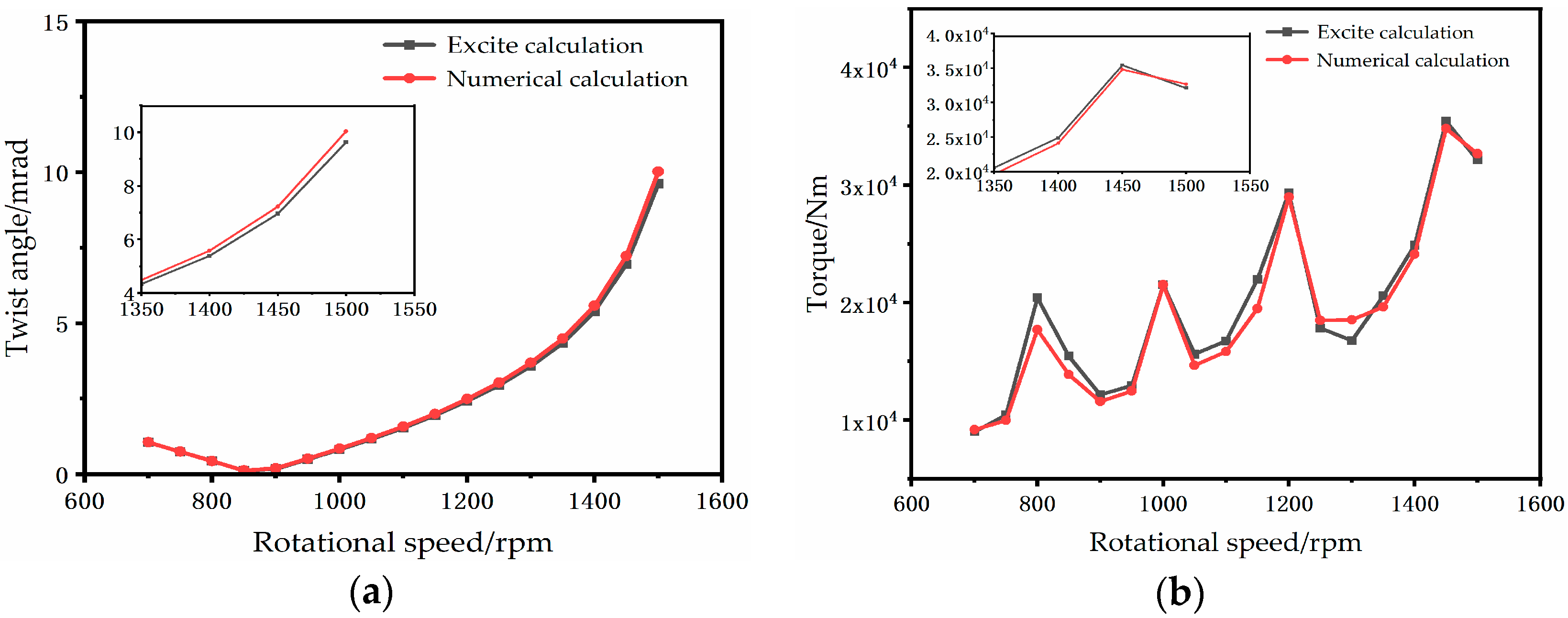
2.3. Forced Vibration Calculation
2.4. Selection of Optimization Parameters for Shock Absorbers
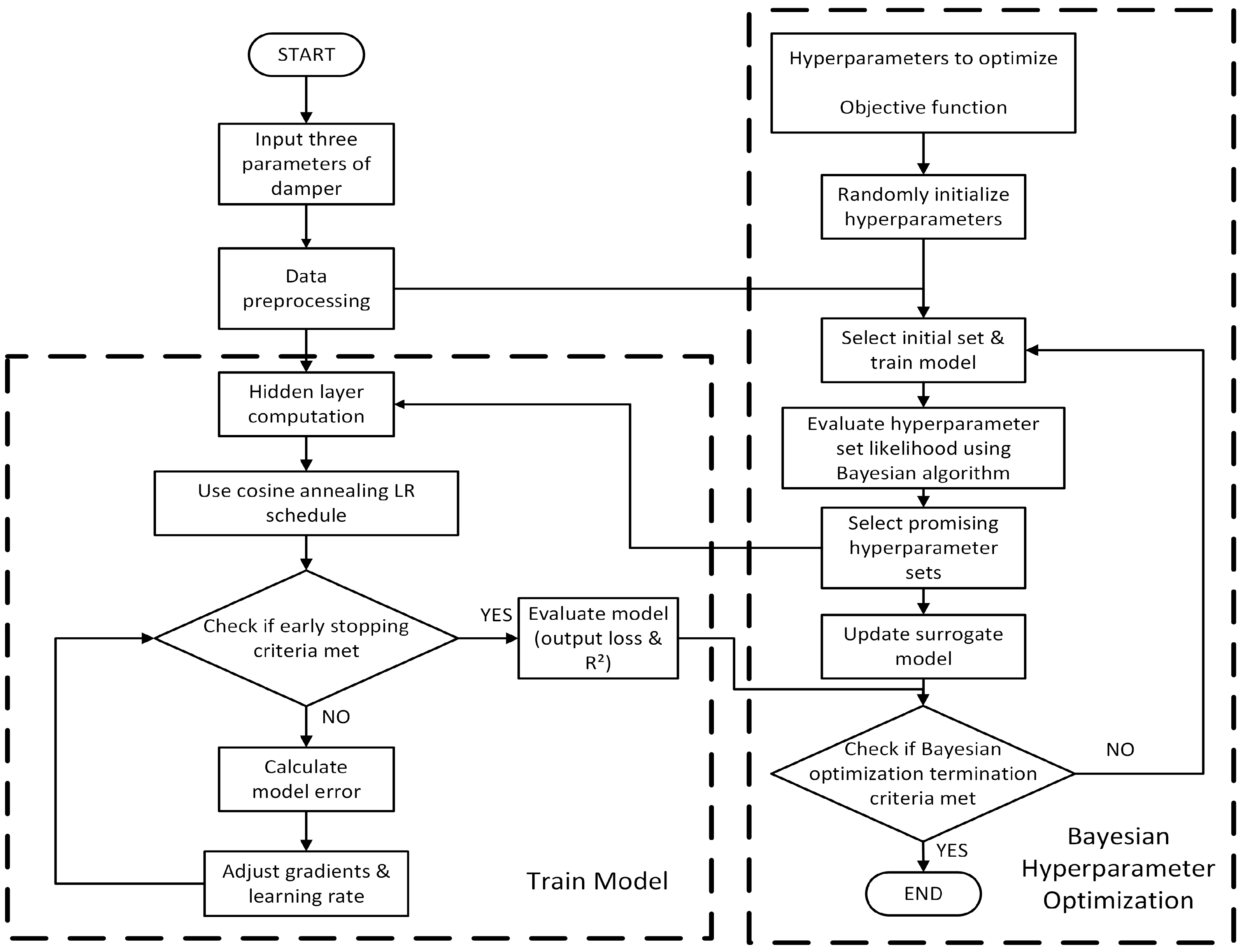
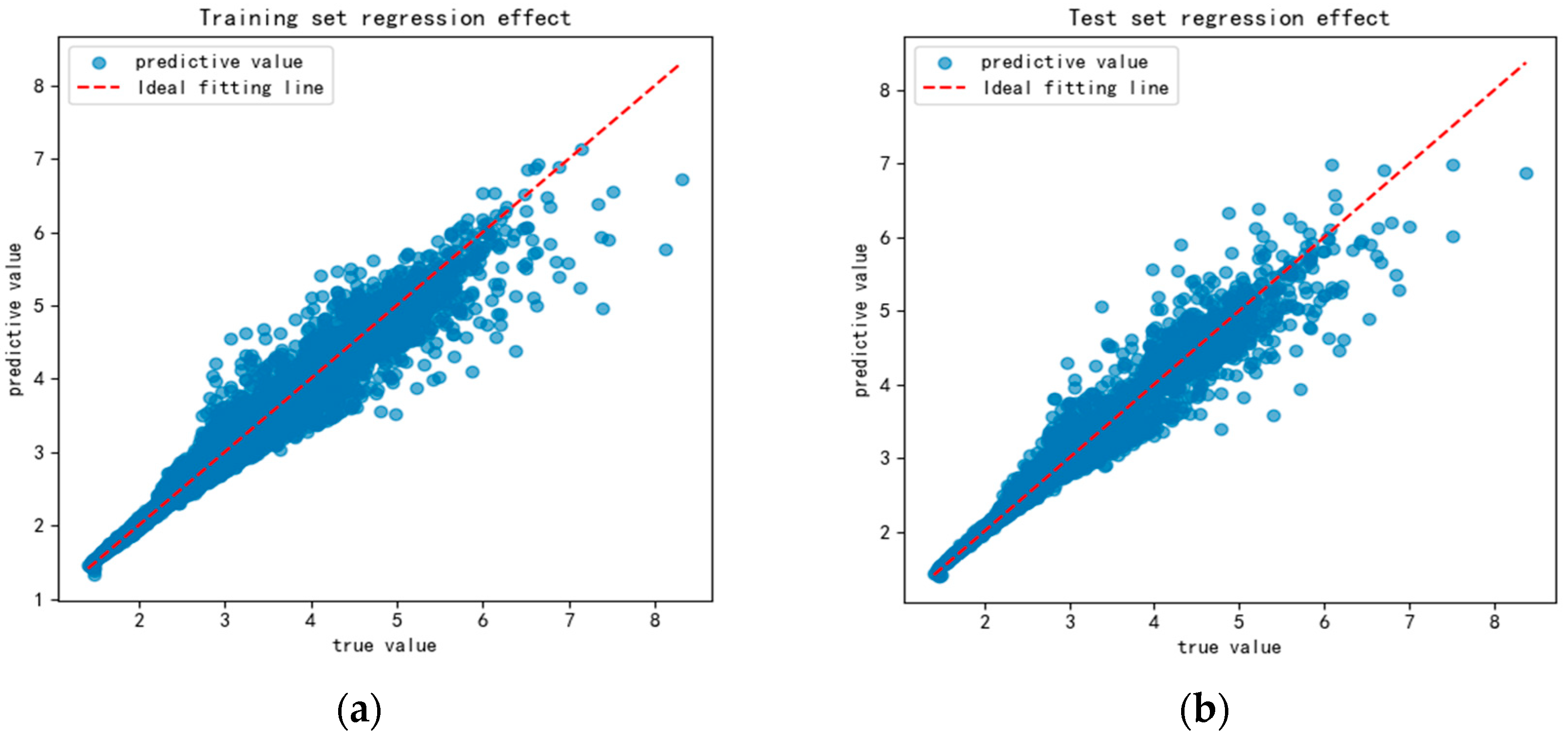
2.5. Neural Network Training of Torsional Vibration Damper Parameters
2.6. Dual Objective Optimization of Torsional Vibration Dampers
3. Results
4. Discussion
5. Conclusions
- Multi-cylinder diesel crankshaft models frequently exhibit poor numerical conditioning. The modified Jacobi sweep method resolves this through threshold-controlled iterations, reducing eigenfrequency errors to <1% relative to ANSYS benchmarks.
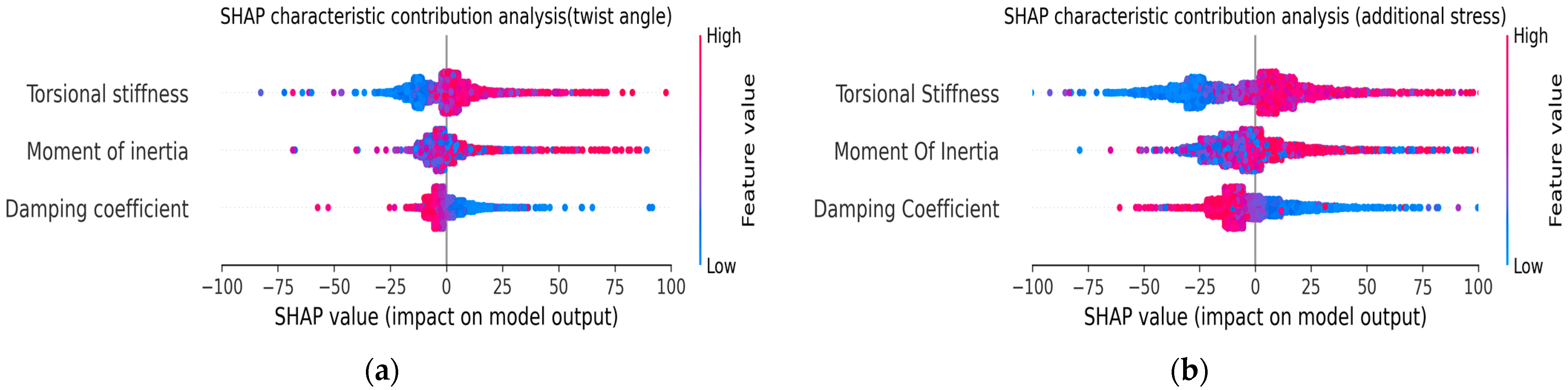
- Traditional inertia ratio recommendations (0.1–0.3) fail to concurrently optimize vibration suppression and stress mitigation. SHAP analysis confirms bidirectional effects of inertia ratios: high inertia ratios (>0.25) effectively reduce torsional amplitudes but marginally impact stress concentrations, while low ratios (<0.15) decrease peak alternating stresses despite slightly increased vibrations.
- Tuning ratio optimization reveals distinct regimes: high-inertia dampers (0.25–0.3) achieve near-theoretical tuning ratios for balanced performance, whereas low-inertia configurations require 15–20% upward tuning ratio adjustments to maximize stress reduction. SHAP-based sensitivity maps validate this compensation mechanism, linking stiffness-tuning trade-offs to nonlinear inertia-stress coupling.
- Damping coefficients consistently converge to the upper bounds of dual-pendulum recommendations, enhancing both vibration attenuation and fatigue resistance. SHAP values reinforce this practice, showing damping’s unidirectional positive contributions.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ali, A.; Ahmed, A.; Ali, M.; Azam, A.; Wu, X.; Zhang, Z.; Yuan, Y. A review of energy harvesting from regenerative shock absorber from 2000 to 2021: Advancements, emerging applications, and technical challenges. Environ. Sci. Pollut. Res. 2023, 30, 5371–5406. [Google Scholar] [CrossRef]
- Singh, W.; Srilatha, N. Design and analysis of shock absorber: A review. Mater. Today Proc. 2018, 5, 4832–4837. [Google Scholar] [CrossRef]
- Zheng, P.; Wang, R.; Gao, J. A comprehensive review on regenerative shock absorber systems. J. Vib. Eng. Technol. 2020, 8, 225–246. [Google Scholar] [CrossRef]
- Martande, S.; Jangale, Y.N.; Motgi, N.S. Design and analysis of shock absorber. Int. J. Appl. Inov. Eng. Manag. 2013, 2, 195–199. [Google Scholar]
- Zhang, R.; Wang, X. Parameter study and optimization of a half-vehicle suspension system model integrated with an arm-teeth regenerative shock absorber using Taguchi method. Mech. Syst. Signal Process. 2019, 126, 65–81. [Google Scholar] [CrossRef]
- Liu, Y.; Pan, L.; Cui, Q.; Meng, D. A Case Study on Structural Optimization Design of Shock Absorber Brackets in Automobile Suspension. IEEE Access 2023, 11, 131064–131072. [Google Scholar] [CrossRef]
- Syrakos, A.; Dimakopoulos, Y.; Tsamopoulos, J. Theoretical study of the flow in a fluid damper containing high viscosity silicone oil: Effects of shear-thinning and viscoelasticity. Phys. Fluids 2018, 30, 030708. [Google Scholar] [CrossRef]
- Sezgen, H.Ç.; Tinkir, M. Optimization of torsional vibration damper of cranktrain system using a hybrid damping approach. Eng. Sci. Technol. Int. J. 2021, 24, 959–973. [Google Scholar] [CrossRef]
- Liu, G.; Hu, H.; Ouyang, Q.; Zhang, F. Multi-objective optimization design and performance comparison of magnetorheological torsional vibration absorbers of different configurations. Materials 2023, 16, 3170. [Google Scholar] [CrossRef]
- Jee, J.; Kim, C.; Kim, Y. Design improvement of a viscous-spring damper for controlling torsional vibration in a propulsion shafting system with an engine acceleration problem. J. Mar. Sci. Eng. 2020, 8, 428. [Google Scholar] [CrossRef]
- Sun, Y.; Feng, T.; Jin, Z. Review on vibration signal analysis of rotating machinery based on deep learning. J. Phys. Conf. Ser. 2021, 1820, 012034. [Google Scholar] [CrossRef]
- Bagri, I.; Tahiry, K.; Hraiba, A.; Touil, A.; Mousrij, A. Vibration Signal Analysis for Intelligent Rotating Machinery Diagnosis and Prognosis: A Comprehensive Systematic Literature Review. Vibration 2024, 7, 1013–1062. [Google Scholar] [CrossRef]
- Guo, Q.; Yang, X.; Li, K.; Li, D. Parameters identification of magnetorheological damper based on particle swarm optimization algorithm. Eng. Appl. Artif. Intell. 2025, 143, 110016. [Google Scholar] [CrossRef]
- Shatskyi, I.; Velychkovych, A. Analytical model of structural damping in friction module of shell shock absorber connected to spring. Shock Vib. 2023, 2023, 4140583. [Google Scholar] [CrossRef]
- Dai, Y.; Liu, X.; Pang, J.; Li, Y.; Lv, Y.; Niu, Y. Vibration trend forecasting of motorized spindle on the basis of signal processing and deep learning. Nonlinear Dyn. 2025, 113, 17477–17490. [Google Scholar] [CrossRef]
- Oh, L.; Pitz, E.; Pochiraju, K. Spindle condition monitoring with a smart vibration sensor and an optimized deep neural network. J. Nondestruct. Eval. Diagn. Progn. Eng. Syst. 2023, 6, 021003. [Google Scholar] [CrossRef]
- Mangalasseri, A.S.; Mukunda, S.; Mahesh, V.; Ponnusami, S.A.; Harursampath, D. Vibration-based energy harvesting characteristics of functionally graded magneto-electro-elastic beam structures using lumped parameter model. J. Vib. Eng. Technol. 2022, 10, 1705–1720. [Google Scholar] [CrossRef]
- Safian, A.; Zhang, H.; Liang, X.; Wu, N. Dynamic simulation of a cylindrical roller bearing with a local defect by combining finite element and lumped parameter models. Meas. Sci. Technol. 2021, 32, 125111. [Google Scholar] [CrossRef]
- GD15-2021; Guidelines for Vibration Control on Ships. China Classification Society (CCS): Beijing, China, 2021.
- Yalcin, H.S.; Arikoglu, A.; Ozkol, I. Free vibration analysis of circular plates by differential transformation method. Appl. Math. Comput. 2009, 212, 377–386. [Google Scholar] [CrossRef]
- Mayes, R.L.; Pacini, B.R.; Roettgen, D.R. A modal model to simulate typical structural dynamic nonlinearity. In Dynamics of Coupled Structures, Volume 4: Proceedings of the 34th IMAC, A Conference and Exposition on Structural Dynamics 2016; Springer International Publishing: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Repin, S.; Litvin, R.; Kuzmichev, V.; Vorontsov, I. Automotive shock absorbers’ applicability for damping resonant oscillations in construction machines. Archit. Eng. 2021, 6, 81–87. [Google Scholar] [CrossRef]
- Maureira-Carsalade, N.; Villagrán-Valenzuela, M.; Sanzana-Jara, D.; Roco-Videla, A. Proof of concept of a novel frictional shock absorber; analytical model and experimental analysis. Eng. Struct. 2021, 230, 111657. [Google Scholar] [CrossRef]
- Wang, X.; Jin, Y.; Schmitt, S.; Olhofer, M. Recent advances in Bayesian optimization. ACM Comput. Surv. 2023, 55, 1–36. [Google Scholar] [CrossRef]
- Alibrahim, H.; Ludwig, S.A. Hyperparameter optimization: Comparing genetic algorithm against grid search and bayesian optimization. In Proceedings of the 2021 IEEE Congress on Evolutionary Computation (CEC), Kraków, Poland, 28 June–1 July 2021. [Google Scholar]
- Turner, R.; Eriksson, D.; McCourt, M.; Kiili, J.; Laaksonen, E.; Xu, Z.; Guyon, I. Bayesian optimization is superior to random search for machine learning hyperparameter tuning: Analysis of the black-box optimization challenge 2020. In Proceedings of the NeurIPS 2020 Competition and Demonstration Track. PMLR, Virtual, 6–12 December 2020. [Google Scholar]
- Wu, K.; Kim, K.; Garnett, R.; Gardner, J.R. The behavior and convergence of local bayesian optimization. Adv. Neural Inf. Process. Syst. 2023, 36, 73497–73523. [Google Scholar]
- Victoria, A.H.; Maragatham, G. Automatic tuning of hyperparameters using Bayesian optimization. Evol. Syst. 2021, 12, 217–223. [Google Scholar] [CrossRef]
- Nguyen, X.D.J.; Liu, Y. Methodology for hyperparameter tuning of deep neural networks for efficient and accurate molecular property prediction. Comput. Chem. Eng. 2025, 193, 108928. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Harmonic Order | Jacobi Iterative Method/(Hz) | Jacobi Screening Method/(Hz) | Lanczos Method/(Hz) |
|---|---|---|---|
| 1 | 305.04 | 108.66 | 108.64 |
| 2 | 308.01 | 279.69 | 279.62 |
| 3 | 410.68 | 461.42 | 461.33 |
| 4 | 638.32 | 644.85 | 644.77 |
| 5 | 817.73 | 825.15 | 825.07 |
| Parameters of Torsional Vibration Damper | Pareto Optimization Solution Parameters | Numerical Calculation Solution | Error Value | ||||
|---|---|---|---|---|---|---|---|
| Moment of Inertia/(kg·m2) | Torsional Stiffness/(N·m/rad) | Twist Angle/(mrad) | Additional Stress/(Mpa) | Twist Angle/(mrad) | Additional Stress/(Mpa) | Twist Angle/(%) | Stress/(%) |
| 2.22 | 1,309,201 | 3.44112 | 18.92056 | 3.44377 | 18.85 | 0.077 | 0.373 |
| 2.46 | 1,508,795 | 3.43292 | 19.15328 | 3.41851 | 19.29 | 0.420 | 0.714 |
| 5.25 | 1,790,494 | 3.05977 | 22.94072 | 3.05135 | 23.11 | 0.275 | 0.738 |
| 6.46 | 1,849,238 | 2.88952 | 25.25194 | 2.89001 | 25.14 | 0.017 | 0.443 |
| Theoretical Shock Absorber Parameters | Pareto-Optimized Damper Parameters | Theoretical Shock Absorber Response | Change in Optimization Objectives | ||||
|---|---|---|---|---|---|---|---|
| Moment of Inertia /(kg·m2) | Torsional Stiffness /(N·m/rad) | Moment of Inertia /(kg·m2) | Torsional Stiffness /(N·m/rad) | Twist Angle /(mrad) | Additional Stress /(Mpa) | Angle Increase /(%) | Stress Mitigation /(%) |
| 2.22 | 865,311.4 | 2.22 | 1,309,201 | 3.4180 | 19.91 | 0.754 | 5.323 |
| 2.46 | 940,286.6 | 2.46 | 1,508,795 | 3.3900 | 20.76 | 0.841 | 7.081 |
| 5.25 | 1,619,536 | 5.25 | 1,790,494 | 3.0416 | 23.60 | 0.320 | 2.076 |
| 6.46 | 1,828,091. | 6.46 | 1,849,238 | 2.8886 | 26.21 | 0.049 | 4.082 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, Z.; Ge, Z. Parameter-Matching Multi-Objective Optimization for Diesel Engine Torsional Dampers. Appl. Sci. 2025, 15, 5639. https://doi.org/10.3390/app15105639
Tian Z, Ge Z. Parameter-Matching Multi-Objective Optimization for Diesel Engine Torsional Dampers. Applied Sciences. 2025; 15(10):5639. https://doi.org/10.3390/app15105639
Chicago/Turabian StyleTian, Zhongxu, and Zhongda Ge. 2025. "Parameter-Matching Multi-Objective Optimization for Diesel Engine Torsional Dampers" Applied Sciences 15, no. 10: 5639. https://doi.org/10.3390/app15105639
APA StyleTian, Z., & Ge, Z. (2025). Parameter-Matching Multi-Objective Optimization for Diesel Engine Torsional Dampers. Applied Sciences, 15(10), 5639. https://doi.org/10.3390/app15105639