
Research Progress of Self-Powered Gait Monitoring Sensor Based on Triboelectric Nanogenerator




Abstract
1. Introduction
2. Triboelectric Nanogenerator
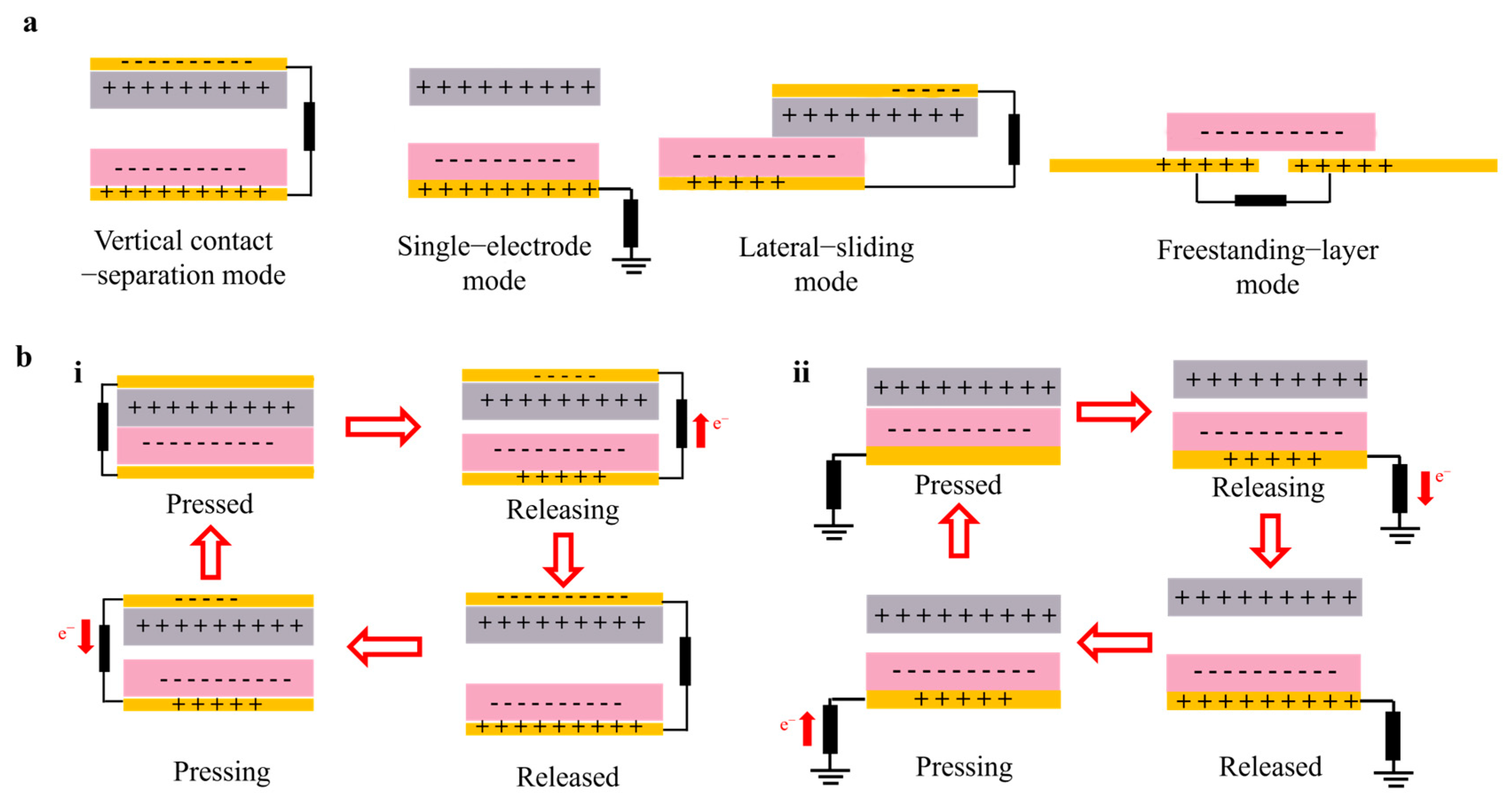
2.1. Working Mechanism of Triboelectric Nanogenerator
2.2. Working Modes of Triboelectric Nanogenerator
3. Applications of Self-Powered Triboelectric Nanogenerator in Gait Monitoring
3.1. Basic Gait Information Monitoring
3.2. Abnormal Gait Detection and Fall Monitoring
3.3. Rehabilitation Assessment and Auxiliary Training
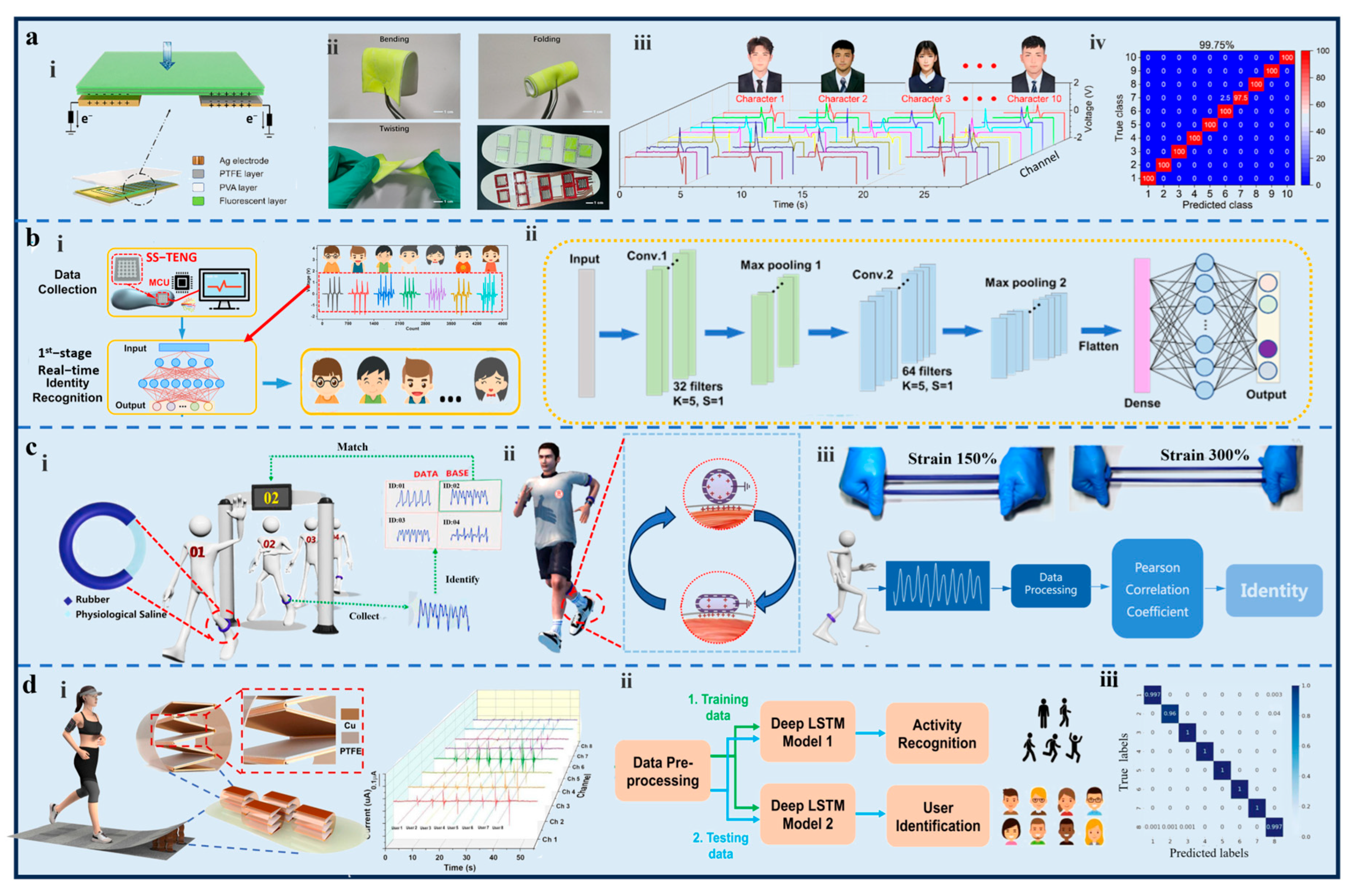
3.4. Machine Learning-Assisted Identity Recognition
3.5. Comparison Between TENGs Based on Different Materials and Structure
4. Conclusions and Prospects
- (1)
- Barriers to high integration of TENG sensors with health monitoring platforms. The integration of TENG-based gait sensors with health monitoring platforms faces several challenges for real-world applications. For example, the gait characteristics of different individuals vary greatly, and the TENG-based gait monitoring sensors may not be able to accurately capture and recognize the gait characteristics of all individuals when collecting data. If the sensor cannot adaptively adjust to these differences, the data collected may be inaccurate, affecting the subsequent analysis and evaluation on the health monitoring platform. Moreover, environmental factors, such as temperature, humidity, and electromagnetic interference, can degrade sensor performance, introducing data deviations and misinterpreting health status. Additionally, compatibility issues arise between TENGs’ signal outputs and existing platforms. Due to their unique signal characteristics, additional circuitry or algorithms are often required for data standardization, increasing system integration complexity.
- (2)
- Comfort of the sensor. During the process of gait diagnosis for patients or long-term monitoring, the discomfort experienced by users when wearing the sensor may affect the accuracy of the signals. The discomfort may lead to skin irritation or other physical issues for the users. Therefore, to ensure optimal comfort during prolonged wear, gait monitoring sensors require comprehensive optimization of their size, shape, and material properties, along with improved wearing methods. During design, the sensor dimensions should be precisely determined through ergonomic analysis of foot biomechanics across diverse populations, measuring both force distribution and range of motion during gait. The shape must conform to natural foot contours to minimize movement interference, while material selection should prioritize soft, skin-friendly biocompatible substrates. Furthermore, the wearing system should incorporate user-friendly fixation mechanisms that maintain sensor stability without restricting movement or causing discomfort, thereby enhancing both functionality and wearability.
- (3)
- Washability of fabric-based TENGs. Most of the sensors used for gait monitoring are wearable. Their hygienic conditions need to be taken into consideration, especially those sensors placed on the soles of the feet. Bacteria that breed from sweat or other secretions secreted during exercise not only pose a threat to the safety of human skin but also make it unsuitable for long-term wearing. In view of this, researchers should explore textile materials of TENGs with washability and self-cleaning to create hygienic conditions for their contact with human skin. For instance, by implementing functionalized antimicrobial embedding strategies, antimicrobial agents are incorporated into triboelectric polymer matrices. This approach enables the device to exhibit self-cleaning properties, effectively reducing the growth of bacteria and maintaining a hygienic environment. Additionally, through optimizing the structural design in the preparation process, the device’s wash resistance can be enhanced. It might involve modifying the material’s composition ratios, adjusting the manufacturing process parameters, or adopting novel fabrication techniques to ensure that the device can withstand repeated washing cycles without significant degradation of its performance or structure.
- (4)
- Stability and durability of the sensor. As a sensor for gait monitoring, the TENG is usually integrated with socks or insoles, or directly contacts the human skin. Gait monitoring is achieved during physical movement, so the impact of chemical substances in human sweat on the sensor cannot be ignored. These impacts may reduce the stability of the sensor. Moreover, environmental factors such as humidity and temperature can potentially compromise the sensor’s performance stability. To solve the above practical problems, on one hand, it is essential to actively research and develop new anti-interference materials. These include corrosion-resistant electrodes, triboelectric polymers resistant to sweat and environmental changes, and materials stable in temperature and humidity. On the other hand, optimizing device encapsulation is crucial. This involves selecting waterproof, moisture-proof, and heat-insulating polymers for tight wrapping, designing a multilayer structure, and configuring ventilation holes rationally. This protects against external substances and balances pressure. Through these efforts, the stability and durability of TENG sensors are likely to be significantly enhanced, potentially promoting broader application in gait monitoring.
- (5)
- System integration and miniaturization. Currently, many gait diagnosis systems and auxiliary training systems based on TENG sensors are composed of multiple modules, which inevitably leads to a relatively large volume. A large volume may limit the application conditions. Therefore, achieving the functional integration of the system and the miniaturization of the device are the keys to the widespread application of the sensing system. For system integration, standardizing interfaces and communication protocols across modules is fundamental. Additionally, meticulous optimization of module design is necessary. Regarding equipment miniaturization, leveraging advanced manufacturing techniques, such as microelectromechanical systems (MEMS) and precision machining, holds great promise. These technologies allow the fabrication of high-precision components within confined spaces, enabling a higher degree of component integration. Through optimized spatial layouts and innovative multifunctional integration designs, multiple functional elements can be consolidated into a compact unit. This approach is likely to reduce the physical footprint of the equipment while maintaining its core functionality, potentially facilitating the broader adoption of TENG-based sensing systems across various applications.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, Y.; Shen, M.; Cui, X.; Shao, Y.; Li, L.; Zhang, Y. Triboelectric nanogenerator based self-powered sensor for artificial intelligence. Nano Energy 2021, 84, 105887. [Google Scholar] [CrossRef]
- Lu, P.; Liao, X.; Guo, X.; Cai, C.; Liu, Y.; Chi, M.; Du, G.; Wei, Z.; Meng, X.; Nie, S. Gel-Based Triboelectric Nanogenerators for Flexible Sensing: Principles, Properties, and Applications. Nano-Micro Lett. 2024, 16, 206. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Li, Y.; Sun, Q.; Yang, J.; Zhao, Y.; Cui, X.; Tian, Y. Triboelectric wearable devices for accelerated wound healing. Chem. Eng. J. 2024, 497, 154628. [Google Scholar] [CrossRef]
- Zhang, C.; Zhang, L.; Tian, Y.; Bao, B.; Li, D. A Machine-Learning-Algorithm-Assisted Intelligent System for Real-Time Wireless Respiratory Monitoring. Appl. Sci. 2023, 13, 3885. [Google Scholar] [CrossRef]
- Jiang, Y.; Liang, X.; Jiang, T.; Wang, Z.L. Advances in Triboelectric Nanogenerators for Blue Energy Harvesting and Marine Environmental Monitoring. Engineering 2024, 33, 204–224. [Google Scholar] [CrossRef]
- Yang, J.; Hong, K.; Hao, Y.; Zhu, X.; Qin, Y.; Su, W.; Zhang, H.; Zhang, C.; Wang, Z.L.; Li, X. Triboelectric Nanogenerators with Machine Learning for Internet of Things. Adv. Mater. Technol. 2025, 10, 2400554. [Google Scholar] [CrossRef]
- Zhang, H.; Gong, X.; Ye, J.; Li, X. Wearable photothermal TENG patches that enhance triboelectric output are used to promote proliferation and metastasis of fibroblasts. Colloid Surf. A-Physicochem. Eng. Asp. 2025, 716, 136687. [Google Scholar] [CrossRef]
- Zahed, M.A.; Rana, S.M.S.; Faruk, O.; Islam, M.R.; Reza, M.S.; Lee, Y.; Pradhan, G.B.; Asaduzzaman, M.; Kim, D.; Bhatta, T.; et al. Self-Powered Wireless System for Monitoring Sweat Electrolytes in Personalized Healthcare Wearables. Adv. Funct. Mater. 2024, 35, 2421021. [Google Scholar] [CrossRef]
- Mensah, A.; Liao, S.; Amesimeku, J.; Li, J.; Chen, Y.; Hao, Y.; Yang, J.; Wang, Q.; Huang, F.; Liu, Y.; et al. Therapeutic Smart Insole Technology with Archimedean Algorithmic Spiral Triboelectric Nanogenerator-Based Power System and Sensors. Adv. Fiber Mater. 2024, 6, 1746–1764. [Google Scholar] [CrossRef]
- Sarkar, P.K.; Kamilya, T.; Acharya, S. Introduction of Triboelectric Positive Bioplastic for Powering Portable Electronics and Self-Powered Gait Sensor. ACS Appl. Energ. Mater. 2019, 2, 5507–5514. [Google Scholar] [CrossRef]
- Lin, Z.; Wu, Z.; Zhang, B.; Wang, Y.-C.; Guo, H.; Liu, G.; Chen, C.; Chen, Y.; Yang, J.; Wang, Z.L. A Triboelectric Nanogenerator-Based Smart Insole for Multifunctional Gait Monitoring. Adv. Mater. Technol. 2019, 4, 1800360. [Google Scholar] [CrossRef]
- Chen, X.; Wan, Z.; Zhang, R.; Ma, L.; Yang, Z.; Xiao, X. Self-powered flexible wearable wireless sensing for outdoor work heatstroke prevention and health monitoring. Chem. Eng. J. 2024, 499, 156431. [Google Scholar] [CrossRef]
- Zheng, Q.; Jia, C.; Sun, F.; Zhang, M.; Wen, Y.; Xie, Z.; Wang, J.; Liu, B.; Mao, Y.; Zhao, C. Ecoflex Flexible Array of Triboelectric Nanogenerators for Gait Monitoring Alarm Warning Applications. Electronics 2023, 12, 3226. [Google Scholar] [CrossRef]
- Issabek, M.; Oralkhan, S.; Anash, A.; Nurbergenova, N.; Balapan, A.; Yeshmukhametov, A.; Rakhmanov, Y.; Kalimuldina, G. AI-Enhanced Gait Analysis Insole with Self-Powered Triboelectric Sensors for Flatfoot Condition Detection. Adv. Mater. Technol 2025, 10, 2401282. [Google Scholar] [CrossRef]
- Ibrahim, A.; Jain, M.; Salman, E.; Willing, R.; Towfighian, S. A smart knee implant using triboelectric energy harvesters. Smart Mater. Struct. 2019, 28, 025040. [Google Scholar] [CrossRef]
- Cao, J.; Fu, X.; Zhu, H.; Qu, Z.; Qi, Y.; Zhang, Z.; Zhang, Z.; Cheng, G.; Zhang, C.; Ding, J. Self-Powered Non-Contact Motion Vector Sensor for Multifunctional Human–Machine Interface. Small Methods 2022, 6, 2200588. [Google Scholar] [CrossRef]
- Luo, C.; Li, H. A three-dimensional coupled structure triboelectric nanogenerator for vertical and horizontal mechanical energy harvesting and fitness gait monitoring. APL Mater. 2024, 12, 041127. [Google Scholar] [CrossRef]
- Ramaraj, S.G.; Elamaran, D.; Tabata, H.; Zhang, F.; Liu, X. Biocompatible triboelectric energy generators (BT-TENGs) for energy harvesting and healthcare applications. Nanoscale 2024, 16, 18251–18273. [Google Scholar] [CrossRef]
- Wang, Y.; Cai, S.; Wang, Y.; Wu, D.; Xiang, G.; Yang, S.; Zhang, J.; Dai, S.; Xu, M.; Xiang, X. Study on dynamics and power generation performance coupling of galloping-based triboelectric nanogenerator for harvesting broadband wind energy. Nano Energy 2024, 130, 110126. [Google Scholar] [CrossRef]
- Mudgal, T.; Tiwari, M.; Bharti, D. Cylindrical-electrode triboelectric nanogenerator for low-speed wind energy harvesting. Nano Energy 2024, 123, 109388. [Google Scholar] [CrossRef]
- Wu, Q.; Wang, W.; Zhang, L.; Wu, X.; Zhang, X.; Wang, D. High-output pulsed water flow and gas-liquid two-phase flow triboelectric nanogenerator based on induction electrification. Nano Energy 2024, 126, 109642. [Google Scholar] [CrossRef]
- Zhou, L.; Zhang, D.; Ji, X.; Zhang, H.; Wu, Y.; Yang, C.; Xu, Z.; Mao, R. A superhydrophobic droplet triboelectric nanogenerator inspired by water strider for self-powered smart greenhouse. Nano Energy 2024, 129, 109985. [Google Scholar] [CrossRef]
- Li, C.; Guo, H.; Liao, J.; Wang, Y.; Qin, Y.; Tian, Z.Q. Gas-driven triboelectric nanogenerator for mechanical energy harvesting and displacement monitoring. Nano Energy 2024, 126, 109681. [Google Scholar] [CrossRef]
- Dong, W.; Gao, S.; Peng, S.; Shi, L.; Shah, S.P.; Li, W. Graphene reinforced cement-based triboelectric nanogenerator for efficient energy harvesting in civil infrastructure. Nano Energy 2024, 131, 110380. [Google Scholar] [CrossRef]
- Liu, H.; Yan, F.; Jin, Y.; Liu, W.; Chen, H.; Kong, F. Hydrodynamic and Energy Capture Properties of a Cylindrical Triboelectric Nanogenerator for Ocean Buoy. Appl. Sci. 2021, 11, 3076. [Google Scholar] [CrossRef]
- Chen, Z.; Lu, Y.; Manica, R.; Lu, J.; Shi, D.; Li, J.; Liu, Q. Cellulose-based slippery covalently attached liquid surfaces for synergistic rain and solar energy harvesting. Nanoscale 2023, 15, 8158–8168. [Google Scholar] [CrossRef] [PubMed]
- Liu, D.; Wen, Y.; Xie, Z.; Zhang, M.; Wang, Y.; Feng, Q.; Cheng, Z.; Lu, Z.; Mao, Y.; Yang, H. Self-Powered, Flexible, Wireless and Intelligent Human Health Management System Based on Natural Recyclable Materials. ACS Sens. 2024, 9, 6236–6246. [Google Scholar] [CrossRef]
- Cheng, Z.; Wen, Y.; Xie, Z.; Zhang, M.; Feng, Q.; Wang, Y.; Liu, D.; Cao, Y.; Mao, Y. A multi-sensor coupled supramolecular elastomer empowers intelligent monitoring of human gait and arch health. Chem. Eng. J. 2025, 504, 158760. [Google Scholar] [CrossRef]
- Liu, B.; Xie, Z.; Feng, Q.; Wang, Y.; Zhang, M.; Lu, Z.; Mao, Y.; Zhang, S. Biodegradable flexible triboelectric nanogenerator for winter sports monitoring. Front. Mater. 2024, 11. [Google Scholar] [CrossRef]
- Xie, Z.; Dai, Y.; Wen, Y.; Zhang, M.; Tu, M.; Sun, F.; An, Z.; Zhao, T.; Liu, B.; Mao, Y. Hydrogel-based flexible degradable triboelectric nanogenerators for human activity recognition. Sustain. Mater. Technol. 2024, 40, e00967. [Google Scholar] [CrossRef]
- Feng, Q.; Wen, Y.; Sun, F.; Xie, Z.; Zhang, M.; Wang, Y.; Liu, D.; Cheng, Z.; Mao, Y.; Zhao, C. Recent Advances in Self-Powered Electronic Skin Based on Triboelectric Nanogenerators. Energies 2024, 17, 638. [Google Scholar] [CrossRef]
- Sun, F.; Zhu, Y.; Jia, C.; Wen, Y.; Zhang, Y.; Chu, L.; Zhao, T.; Liu, B.; Mao, Y. Deep-Learning-Assisted Neck Motion Monitoring System Self-Powered Through Biodegradable Triboelectric Sensors. Adv. Funct. Mater. 2024, 34, 2310742. [Google Scholar] [CrossRef]
- Zhang, Y.; Liu, J.; Zhang, J.; Chen, Y.; Zhou, Y.; Liu, X. A flexible droplet-based triboelectric-electromagnetic hybrid generator for raindrop energy harvesting. Nano Energy 2024, 121, 109253. [Google Scholar] [CrossRef]
- Bu, X.; Zhou, B.; Li, J.; Gao, C.; Guo, J. Orange peel-like triboelectric nanogenerators with multiscale micro-nano structure for energy harvesting and touch sensing applications. Nano Energy 2024, 122, 109280. [Google Scholar] [CrossRef]
- Feng, Y.; Pan, G.; Wu, C. Experiment Study of Deformable Honeycomb Triboelectric Nanogenerator for Energy Collection and Vibration Measurement in Downhole. Appl. Sci. 2024, 14, 2539. [Google Scholar] [CrossRef]
- Bardakas, A.; Segkos, A.; Tsamis, C. Zinc Oxide-Based Rotational–Linear Triboelectric Nanogenerator. Appl. Sci. 2024, 14, 2396. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Z.; Wang, G.; Liu, G.; Chen, J.; Pu, X.; Xi, Y.; Wang, X.; Guo, H.; Hu, C.; et al. Integrated charge excitation triboelectric nanogenerator. Nat. Commun. 2019, 10, 1426. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, Y.; Deng, L.; Zhu, X.; Xu, C.; Xie, L.; Yang, Q.; Zhang, H. Efficient electrical energy conversion strategies from triboelectric nanogenerators to practical applications: A review. Nano Energy 2024, 132, 110383. [Google Scholar] [CrossRef]
- Hinchet, R.; Yoon, H.-J.; Ryu, H.; Kim, M.-K.; Choi, E.-K.; Kim, D.-S.; Kim, S.-W. Transcutaneous ultrasound energy harvesting using capacitive triboelectric technology. Science 2019, 365, 491–494. [Google Scholar] [CrossRef]
- Zhu, G.; Peng, B.; Chen, J.; Jing, Q.; Lin Wang, Z. Triboelectric nanogenerators as a new energy technology: From fundamentals, devices, to applications. Nano Energy 2015, 14, 126–138. [Google Scholar] [CrossRef]
- Niu, S.; Liu, Y.; Chen, X.; Wang, S.; Zhou, Y.S.; Lin, L.; Xie, Y.; Wang, Z.L. Theory of freestanding triboelectric-layer-based nanogenerators. Nano Energy 2015, 12, 760–774. [Google Scholar] [CrossRef]
- Lone, S.A.; Lim, K.C.; Kaswan, K.; Chatterjee, S.; Fan, K.-P.; Choi, D.; Lee, S.; Zhang, H.; Cheng, J.; Lin, Z.-H. Recent advancements for improving the performance of triboelectric nanogenerator devices. Nano Energy 2022, 99, 107318. [Google Scholar] [CrossRef]
- Zou, Y.; Raveendran, V.; Chen, J. Wearable triboelectric nanogenerators for biomechanical energy harvesting. Nano Energy 2020, 77, 105303. [Google Scholar] [CrossRef]
- Zhang, M.; Wen, Y.; Xie, Z.; Liu, B.; Sun, F.; An, Z.; Zhong, Y.; Feng, Q.; Zhao, T.; Mao, Y. Wireless Sensing System Based on Biodegradable Triboelectric Nanogenerator for Evaluating Sports and Sleep Respiratory. Macromol. Rapid Commun. 2024, 45, 2400151. [Google Scholar] [CrossRef]
- Mao, Y.; Wen, Y.; Liu, B.; Sun, F.; Zhu, Y.; Wang, J.; Zhang, R.; Yu, Z.; Chu, L.; Zhou, A. Flexible wearable intelligent sensing system for wheelchair sports monitoring. iScience 2023, 26, 108126. [Google Scholar] [CrossRef]
- Sun, P.; Cai, N.; Zhong, X.; Zhao, X.; Zhang, L.; Jiang, S. Facile monitoring for human motion on fireground by using MiEs-TENG sensor. Nano Energy 2021, 89, 106492. [Google Scholar] [CrossRef]
- Xu, Z.; Zhang, D.; Cai, H.; Yang, Y.; Zhang, H.; Du, C. Performance enhancement of triboelectric nanogenerators using contact-separation mode in conjunction with the sliding mode and multifunctional application for motion monitoring. Nano Energy 2022, 102, 107719. [Google Scholar] [CrossRef]
- Cai, J.; Zhang, Z. A Spring Structure Triboelectric Nanogenerator for Human Gait Monitoring System. Nano 2021, 17, 2250001. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, Y.; Yang, G.; Hao, X.; Lv, X.; Wu, F.; Liu, J.; Zhang, Y. Wearable and self-powered sensors made by triboelectric nanogenerators assembled from antibacterial bromobutyl rubber. Nano Energy 2021, 82, 105769. [Google Scholar] [CrossRef]
- Beigh, N.T.; Beigh, F.T.; Mallick, D. Machine learning assisted hybrid transduction nanocomposite based flexible pressure sensor matrix for human gait analysis. Nano Energy 2023, 116, 108824. [Google Scholar] [CrossRef]
- Jao, Y.-T.; Yang, P.-K.; Chiu, C.-M.; Lin, Y.-J.; Chen, S.-W.; Choi, D.; Lin, Z.-H. A textile-based triboelectric nanogenerator with humidity-resistant output characteristic and its applications in self-powered healthcare sensors. Nano Energy 2018, 50, 513–520. [Google Scholar] [CrossRef]
- Wu, W.; Wen, S.; Wei, Y.; Ruan, L.; Li, F.; Cao, X.; Wang, Z.L.; Zhang, L. A volatile organic compound free unibody triboelectric nanogenerator and its application as a smart green track. Nano Energy 2023, 105, 108001. [Google Scholar] [CrossRef]
- Fan, F.-R.; Tian, Z.-Q.; Lin Wang, Z. Flexible triboelectric generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Wu, J.; Wang, X.; Li, H.; Wang, F.; Hu, Y. First-principles investigations on the contact electrification mechanism between metal and amorphous polymers for triboelectric nanogenerators. Nano Energy 2019, 63, 103864. [Google Scholar] [CrossRef]
- You, J.; Shao, J.; He, Y.; Guo, X.; See, K.W.; Wang, Z.L.; Wang, X. Simulation model of a non-contact triboelectric nanogenerator based on electrostatic induction. EcoMat 2023, 5, e12392. [Google Scholar] [CrossRef]
- Wang, Z.L. Triboelectric Nanogenerators as New Energy Technology for Self-Powered Systems and as Active Mechanical and Chemical Sensors. ACS Nano 2013, 7, 9533–9557. [Google Scholar] [CrossRef]
- Wang, Z.L.; Chen, J.; Lin, L. Progress in triboelectric nanogenerators as a new energy technology and self-powered sensors. Energy Environ. Sci. 2015, 8, 2250–2282. [Google Scholar] [CrossRef]
- Shi, K.; Chai, B.; Zou, H.; Wen, Z.; He, M.; Chen, J.; Jiang, P.; Huang, X. Contact Electrification at Adhesive Interface: Boosting Charge Transfer for High-Performance Triboelectric Nanogenerators. Adv. Funct. Mater. 2023, 33, 2307678. [Google Scholar] [CrossRef]
- Wang, N.; Yupeng, L.; Enyi, Y.; Zibiao, L.; Wang, D. Control methods and applications of interface contact electrification of triboelectric nanogenerators: A review. Mater. Res. Lett. 2022, 10, 97–123. [Google Scholar] [CrossRef]
- Yang, P.; Shi, Y.; Tao, X.; Liu, Z.; Dong, X.; Wang, Z.L.; Chen, X. Radical anion transfer during contact electrification and its compensation for charge loss in triboelectric nanogenerator. Matter 2023, 6, 1295–1311. [Google Scholar] [CrossRef]
- Zhao, L.; Guo, X.; Pan, Y.; Jia, S.; Liu, L.; Daoud, W.A.; Poechmueller, P.; Yang, X. Triboelectric gait sensing analysis system for self-powered IoT-based human motion monitoring. InfoMat 2024, 6, e12520. [Google Scholar] [CrossRef]
- Zhao, W.; Li, N.; Liu, X.; Liu, L.; Yue, C.; Zeng, C.; Liu, Y.; Leng, J. 4D printed shape memory metamaterials with sensing capability derived from the origami concept. Nano Energy 2023, 115, 108697. [Google Scholar] [CrossRef]
- Shao, Y.; Luo, C.; Deng, B.-w.; Yin, B.; Yang, M.-b. Flexible porous silicone rubber-nanofiber nanocomposites generated by supercritical carbon dioxide foaming for harvesting mechanical energy. Nano Energy 2020, 67, 104290. [Google Scholar] [CrossRef]
- Zhu, M.; Shi, Q.; He, T.; Yi, Z.; Ma, Y.; Yang, B.; Chen, T.; Lee, C. Self-Powered and Self-Functional Cotton Sock Using Piezoelectric and Triboelectric Hybrid Mechanism for Healthcare and Sports Monitoring. ACS Nano 2019, 13, 1940–1952. [Google Scholar] [CrossRef]
- Xi, Y.; Hua, J.; Shi, Y. Noncontact triboelectric nanogenerator for human motion monitoring and energy harvesting. Nano Energy 2020, 69, 104390. [Google Scholar] [CrossRef]
- Yun, S.-Y.; Kim, M.H.; Yang, G.G.; Choi, H.J.; Kim, D.-W.; Choi, Y.-K.; Kim, S.O. A triboelectric nanogenerator with synergistic complementary nanopatterns fabricated by block copolymer self-assembly. J. Mater. Chem. A 2024, 12, 11302–11309. [Google Scholar] [CrossRef]
- Hu, S.; Li, H.; Lu, W.; Han, T.; Xu, Y.; Shi, X.; Peng, Z.; Cao, X. Triboelectric Insoles with Normal-Shear Plantar Stress Perception. Adv. Funct. Mater. 2024, 34, 2313458. [Google Scholar] [CrossRef]
- Wang, Z.; Bu, M.; Xiu, K.; Sun, J.; Hu, N.; Zhao, L.; Gao, L.; Kong, F.; Zhu, H.; Song, J.; et al. A flexible, stretchable and triboelectric smart sensor based on graphene oxide and polyacrylamide hydrogel for high precision gait recognition in Parkinsonian and hemiplegic patients. Nano Energy 2022, 104, 107978. [Google Scholar] [CrossRef]
- Xiong, J.; Thangavel, G.; Wang, J.; Zhou, X.; Lee, P.S. Self-healable sticky porous elastomer for gas-solid interacted power generation. Sci. Adv. 2020, 6, eabb4246. [Google Scholar] [CrossRef]
- Ahmed, T.; Gao, Y.; So, M.Y.; Tan, D.; Lu, J.; Zhang, J.; Wang, Q.; Liu, X.; Xu, B. Diamond-Structured Fabric-Based Triboelectric Nanogenerators for Energy Harvesting and Healthcare Application. Adv. Funct. Mater. 2024, 34, 2408680. [Google Scholar] [CrossRef]
- Wang, Y.; Chu, L.; Meng, S.; Yang, M.; Yu, Y.; Deng, X.; Qi, C.; Kong, T.; Liu, Z. Scalable and Ultra-Sensitive Nanofibers Coaxial Yarn-Woven Triboelectric Nanogenerator Textile Sensors for Real-Time Gait Analysis. Adv. Sci. 2024, 11, 2401436. [Google Scholar] [CrossRef] [PubMed]
- Yeh, C.; Kao, F.-C.; Wei, P.-H.; Pal, A.; Kaswan, K.; Huang, Y.-T.; Parashar, P.; Yeh, H.-Y.; Wang, T.-W.; Tiwari, N.; et al. Bioinspired shark skin-based liquid metal triboelectric nanogenerator for self-powered gait analysis and long-term rehabilitation monitoring. Nano Energy 2022, 104, 107852. [Google Scholar] [CrossRef]
- Zhang, Q.; Jin, T.; Cai, J.; Xu, L.; He, T.; Wang, T.; Tian, Y.; Li, L.; Peng, Y.; Lee, C. Wearable Triboelectric Sensors Enabled Gait Analysis and Waist Motion Capture for IoT-Based Smart Healthcare Applications. Adv. Sci. 2022, 9, 2103694. [Google Scholar] [CrossRef]
- Wei, C.; Cheng, R.; Ning, C.; Wei, X.; Peng, X.; Lv, T.; Sheng, F.; Dong, K.; Wang, Z.L. A Self-Powered Body Motion Sensing Network Integrated with Multiple Triboelectric Fabrics for Biometric Gait Recognition and Auxiliary Rehabilitation Training. Adv. Funct. Mater. 2023, 33, 2303562. [Google Scholar] [CrossRef]
- Xu, W.; Wong, M.-C.; Guo, Q.; Jia, T.; Hao, J. Healable and shape-memory dual functional polymers for reliable and multipurpose mechanical energy harvesting devices. J. Mater. Chem. A 2019, 7, 16267–16276. [Google Scholar] [CrossRef]
- Guo, Z.H.; Zhang, Z.; An, K.; He, T.; Sun, Z.; Pu, X.; Lee, C. A Wearable Multidimensional Motion Sensor for AI-Enhanced VR Sports. Research 2023, 6, 0154. [Google Scholar] [CrossRef]
- Zhang, D.; Xu, Z.; Wang, Z.; Cai, H.; Wang, J.; Li, K. Machine-learning-assisted wearable PVA/Acrylic fluorescent layer-based triboelectric sensor for motion, gait and individual recognition. Chem. Eng. J. 2023, 478, 147075. [Google Scholar] [CrossRef]
- Xu, L.; Zhong, S.; Yue, T.; Zhang, Z.; Lu, X.; Lin, Y.; Li, L.; Tian, Y.; Jin, T.; Zhang, Q.; et al. AIoT-enhanced health management system using soft and stretchable triboelectric sensors for human behavior monitoring. EcoMat 2024, 6, e12448. [Google Scholar] [CrossRef]
- Han, Y.; Yi, F.; Jiang, C.; Dai, K.; Xu, Y.; Wang, X.; You, Z. Self-powered gait pattern-based identity recognition by a soft and stretchable triboelectric band. Nano Energy 2019, 56, 516–523. [Google Scholar] [CrossRef]
- Li, J.; Xie, Z.; Wang, Z.; Lin, Z.; Lu, C.; Zhao, Z.; Jin, Y.; Yin, J.; Mu, S.; Zhang, C.; et al. A triboelectric gait sensor system for human activity recognition and user identification. Nano Energy 2023, 112, 108473. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structure | Working Mode | Tribo-Materials | TENG Output | Detection Things | Refs. |
|---|---|---|---|---|---|
| Nanofiber | C-S | PVDF/BaTiO3/MWCNT and silver fabric | ~374 V, ~10.2 mA | Step frequency, step speed and acceleration monitoring. | [61] |
| Polymer | TENG + PENG | Al and PFF | ~131 V, ~1.1 μA | Motion status and step frequency monitoring. | [62] |
| Elastomer | S-E | Rubber and carbon nanofiber | ~91 V, ~2.87 μA | Abnormal gait detection. | [63] |
| Textile | TENG + PENG | PEDOT: PSS coated fabrics and PTFE | ~1.71 mW | Gait pattern recognition, motion tracking. | [64] |
| Non-contact | S-E | Body and paper | ~2 V | Motion speed tracking. | [65] |
| Copolymer | C-S | Cu and Teflon | ~442 V, ~22.2 μA | Abnormal gait monitoring. | [66] |
| Elastomer | Gas–solid interaction | PDPU porous elastomer and air | ~5.2 V | Parkinsonian gait recognition. | [69] |
| Textile | C-S | Nylon/cotton yarn and PDMS/BaTiO3 | ~763 V, ~20.4 μA | Abnormal gait monitoring fall monitoring. | [70] |
| Yarn-woven | C-S | PVDF and PA66 yarns | ~3.45 V, ~62.1 mW | Abnormal gait detection and joint movement monitoring. | [71] |
| Bionic | S-E | Ecoflex and liquid metals | ~32 V, ~19.04 mW | Detection of neuromuscular disorders and rehabilitation self-assessment. | [72] |
| Textile | C-S | Ecoflex and Ni-fabric | ~20 V, ~1.3 μW | User recognition. Rehabilitation monitoring. | [73] |
| Textile | C-S | PE sheet yarn and conductive fabric | ~9 V | Biological gait recognition, assisted rehabilitation training. | [74] |
| Polymer | S-E | PBA polymer and movable object | Flatfoot treatment. Gait analysis. | [75] | |
| Triboelectric band | S-E | Rubber tube and skin | ~89.4 V | Identity recognition. Step frequency and speed monitoring. | [79] |
| Stacked structures | C-S | PTFE and copper foils | ~80 V, ~10.58 μW | Identity recognition. Gait recognition. Fitness monitoring. | [80] |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, Y.; Liang, J.; Zhang, R.; Zhao, T.; Zhou, A. Research Progress of Self-Powered Gait Monitoring Sensor Based on Triboelectric Nanogenerator. Appl. Sci. 2025, 15, 5637. https://doi.org/10.3390/app15105637
Mao Y, Liang J, Zhang R, Zhao T, Zhou A. Research Progress of Self-Powered Gait Monitoring Sensor Based on Triboelectric Nanogenerator. Applied Sciences. 2025; 15(10):5637. https://doi.org/10.3390/app15105637
Chicago/Turabian StyleMao, Yupeng, Jiaxiang Liang, Rui Zhang, Tianming Zhao, and Aiguo Zhou. 2025. "Research Progress of Self-Powered Gait Monitoring Sensor Based on Triboelectric Nanogenerator" Applied Sciences 15, no. 10: 5637. https://doi.org/10.3390/app15105637
APA StyleMao, Y., Liang, J., Zhang, R., Zhao, T., & Zhou, A. (2025). Research Progress of Self-Powered Gait Monitoring Sensor Based on Triboelectric Nanogenerator. Applied Sciences, 15(10), 5637. https://doi.org/10.3390/app15105637