
Proof-of-Concept of a Monopulse Antenna Architecture Enabling Radar Sensors in Unmanned Aircraft Collision Avoidance Systems for UAS in U-Space Airspaces


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
Featured Application
Abstract
1. Introduction
2. Design Requirements
3. Formulation of a Concept of Radar Antennas for CA Systems
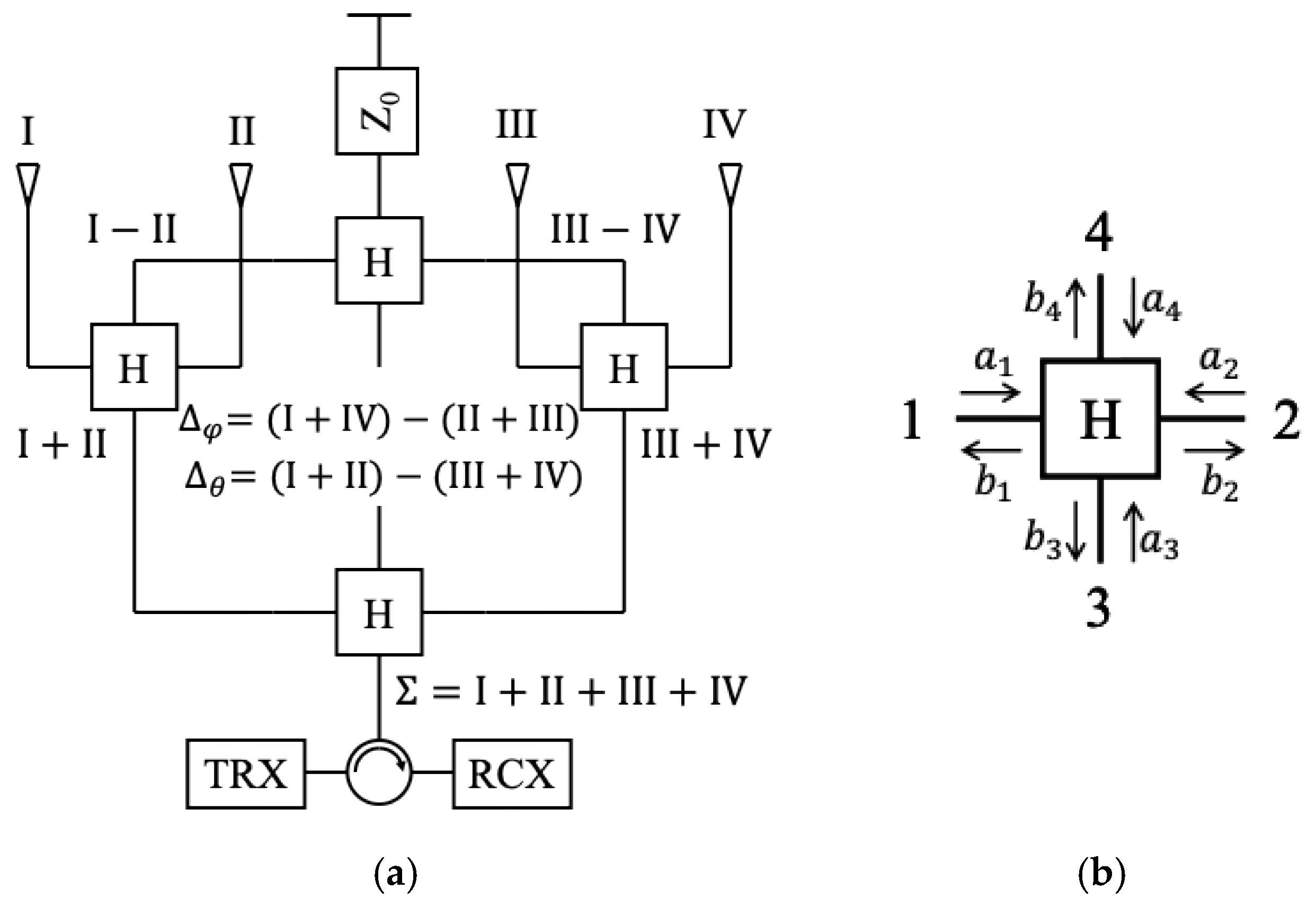
3.1. Identification of a Candidate Architecture
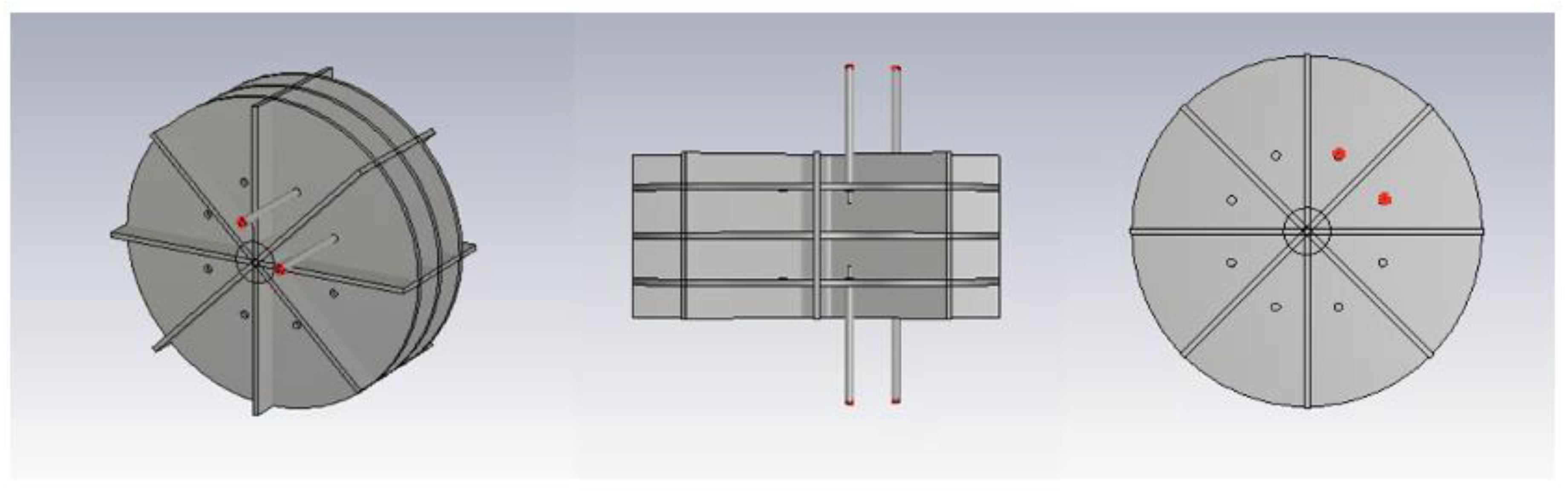
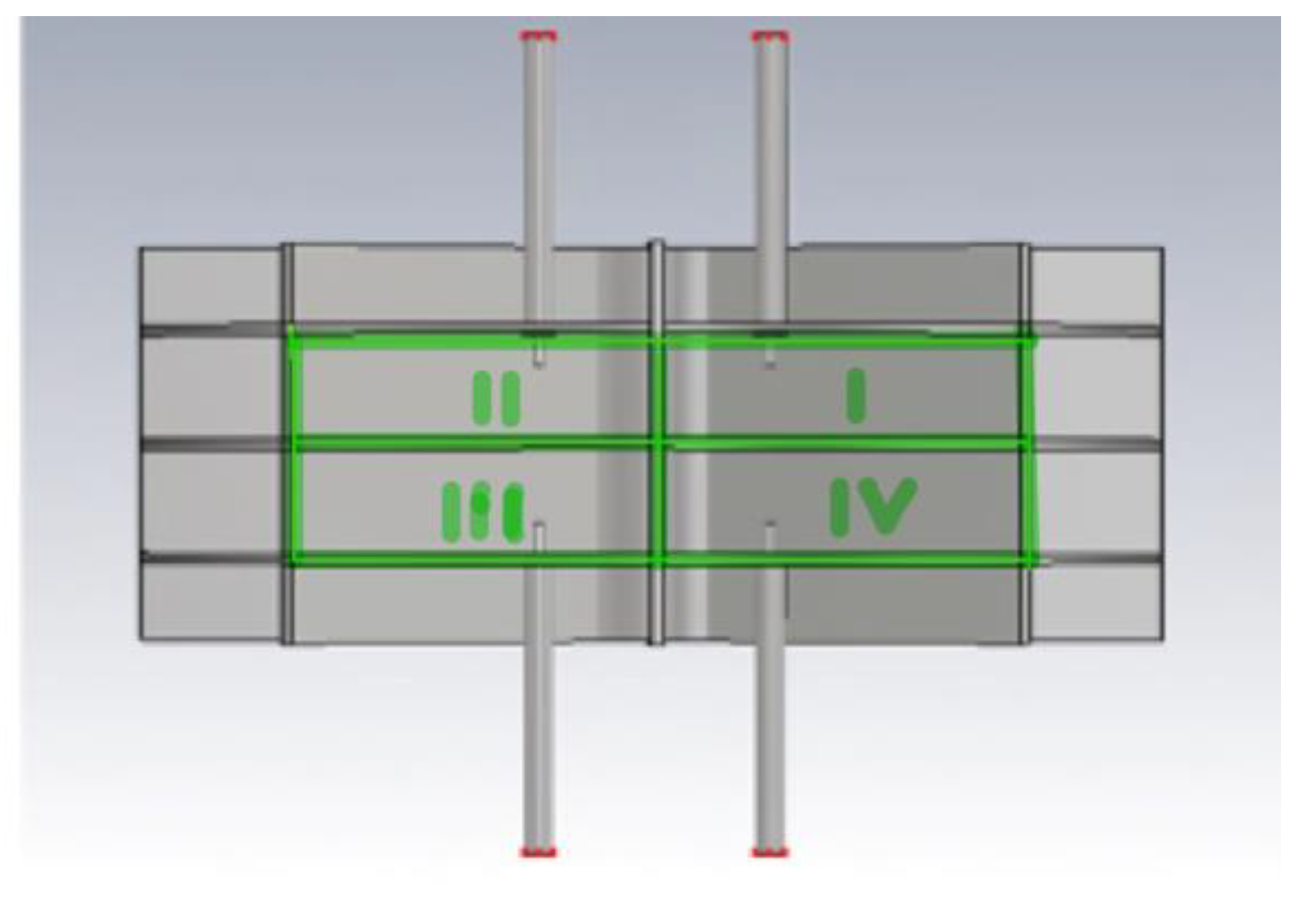
3.2. Design of a Prototype Implementing the Candidate Architecture
4. Experimental Proof of Concept
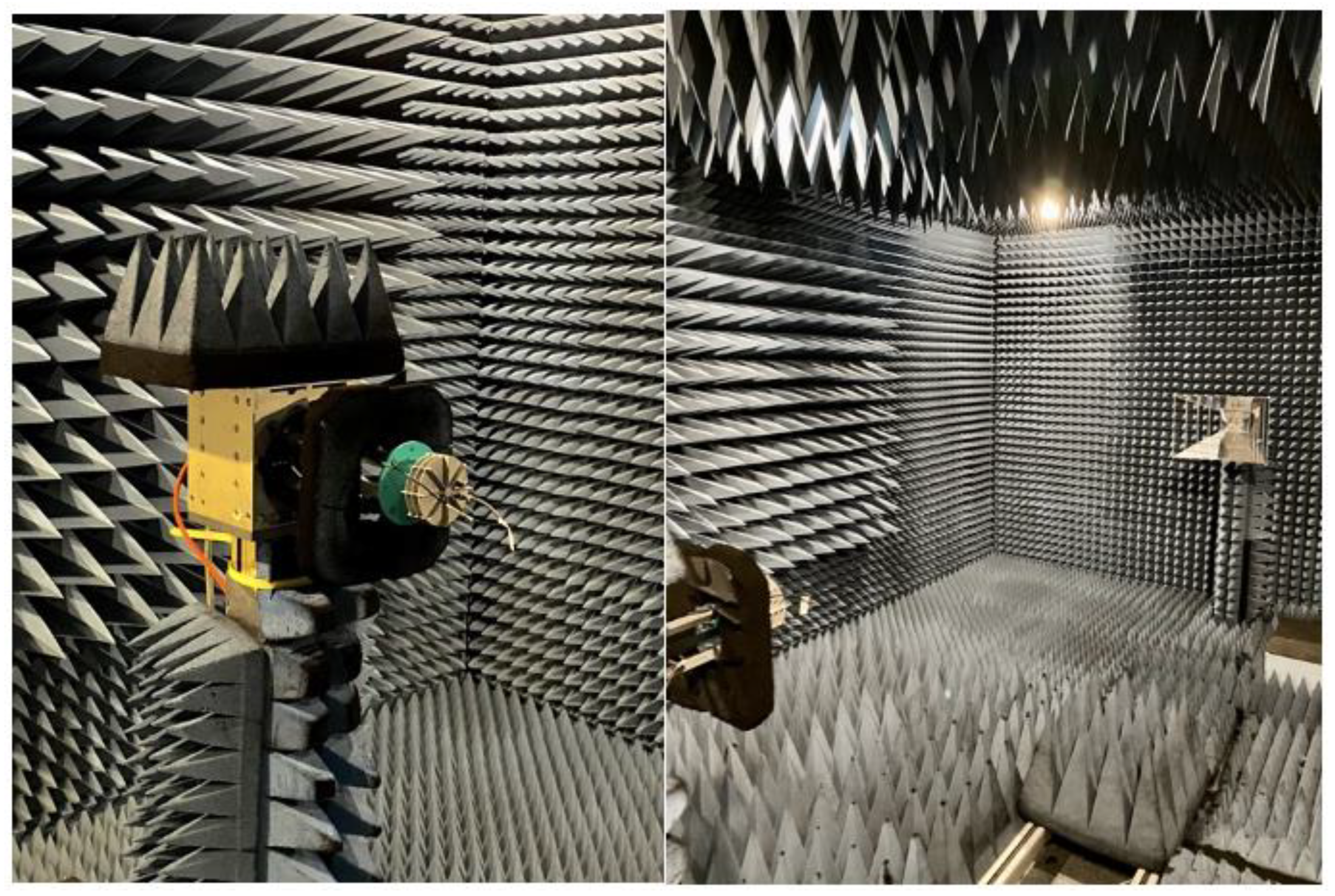
4.1. Materials and Methods
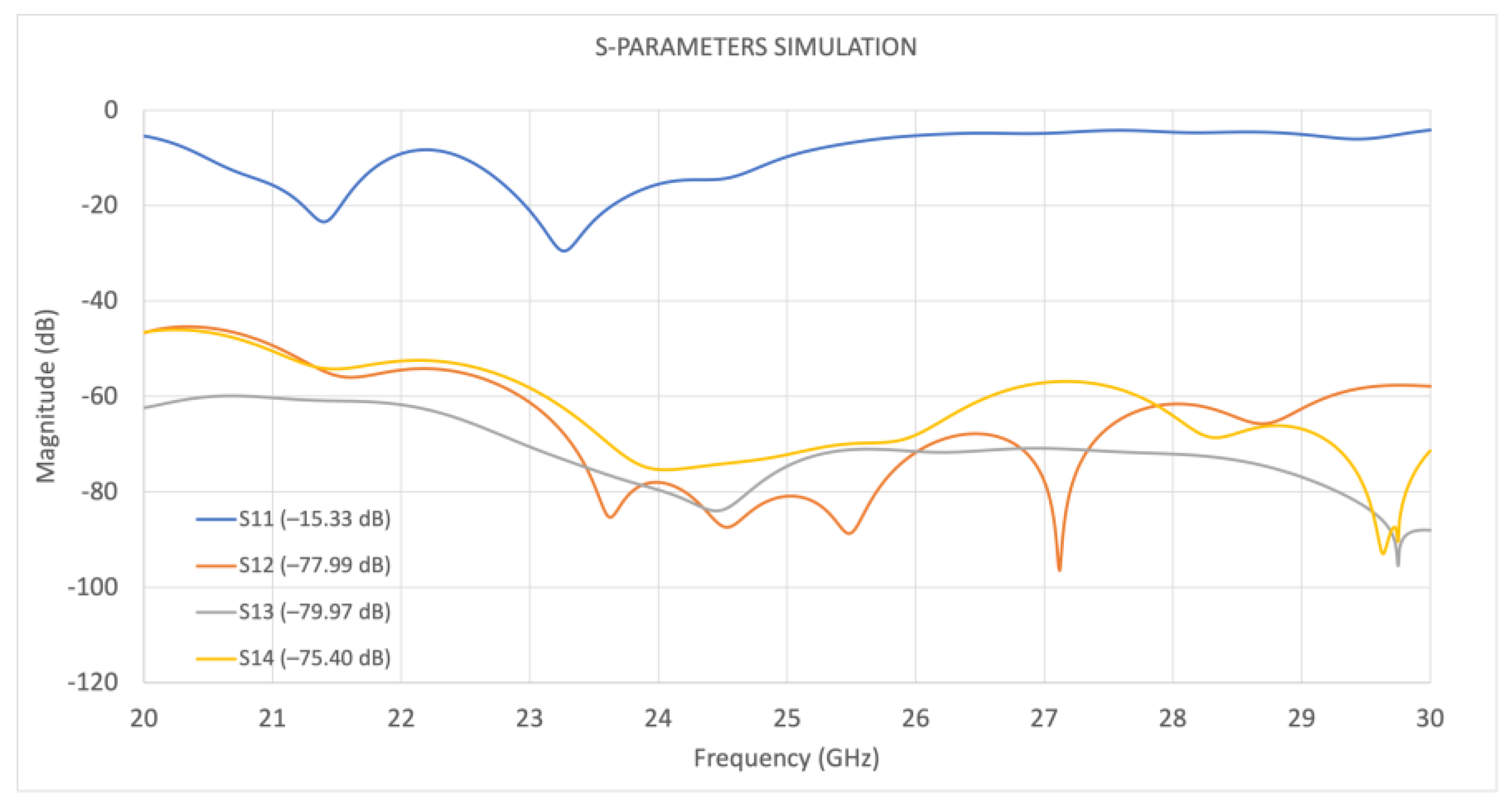
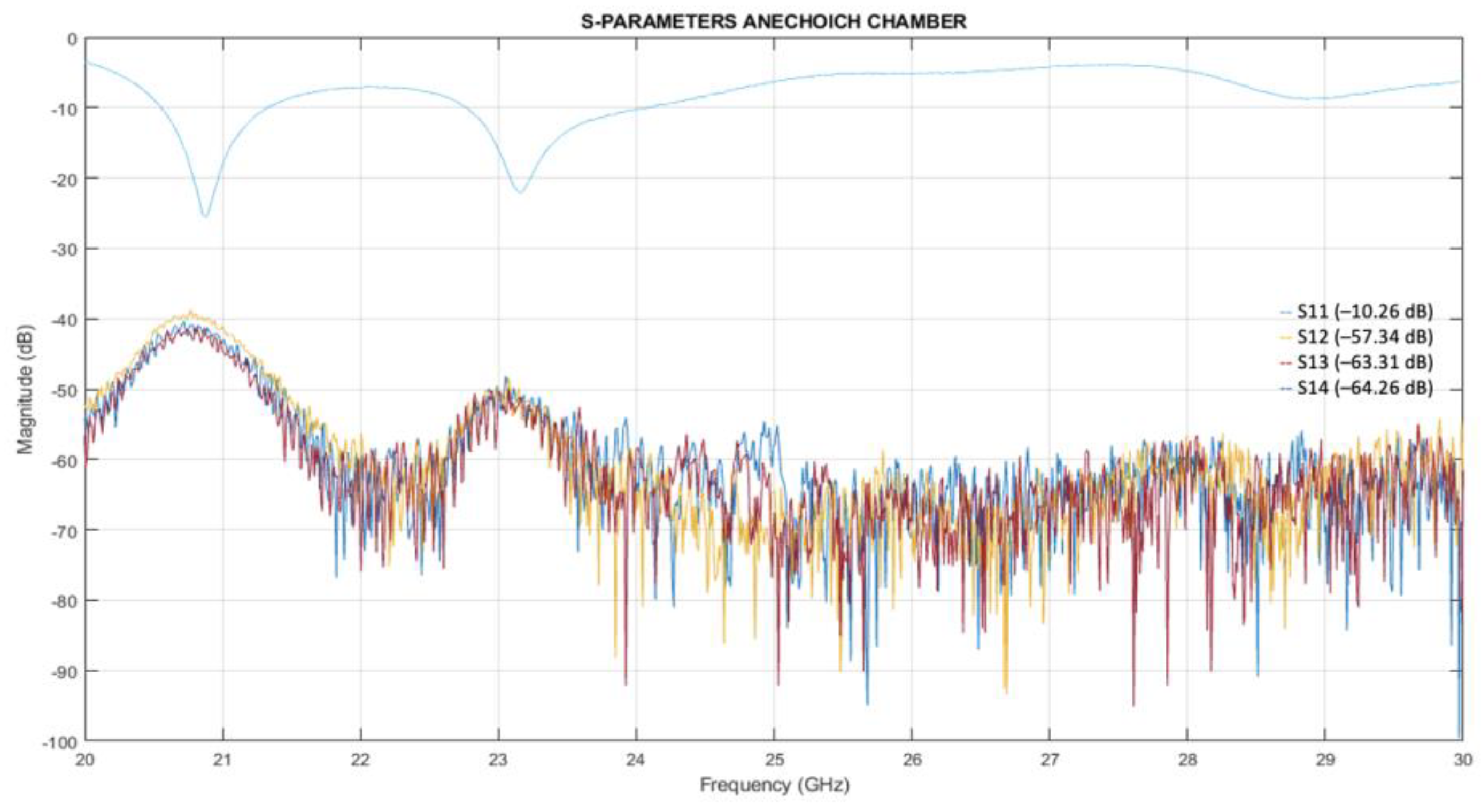
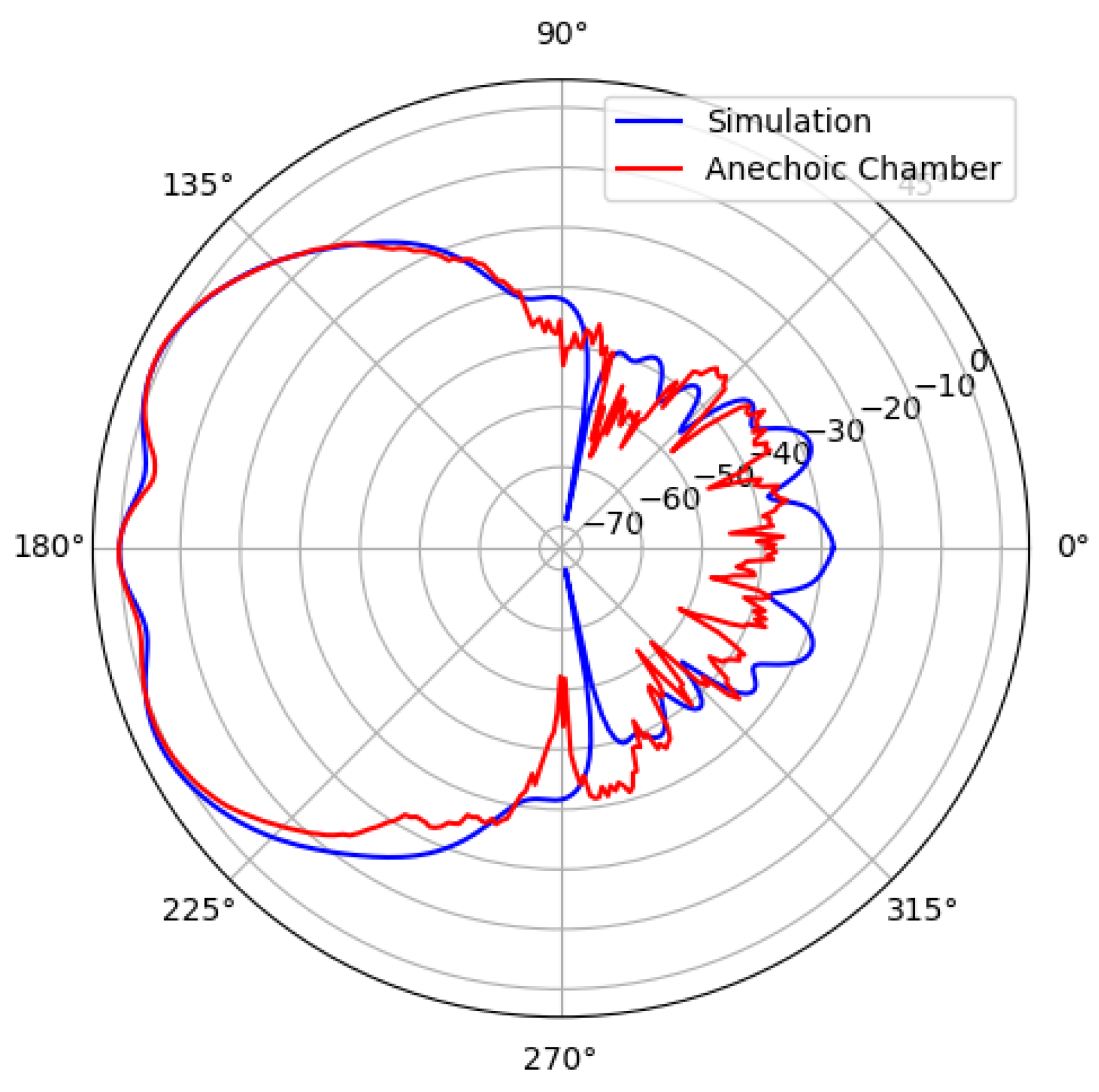
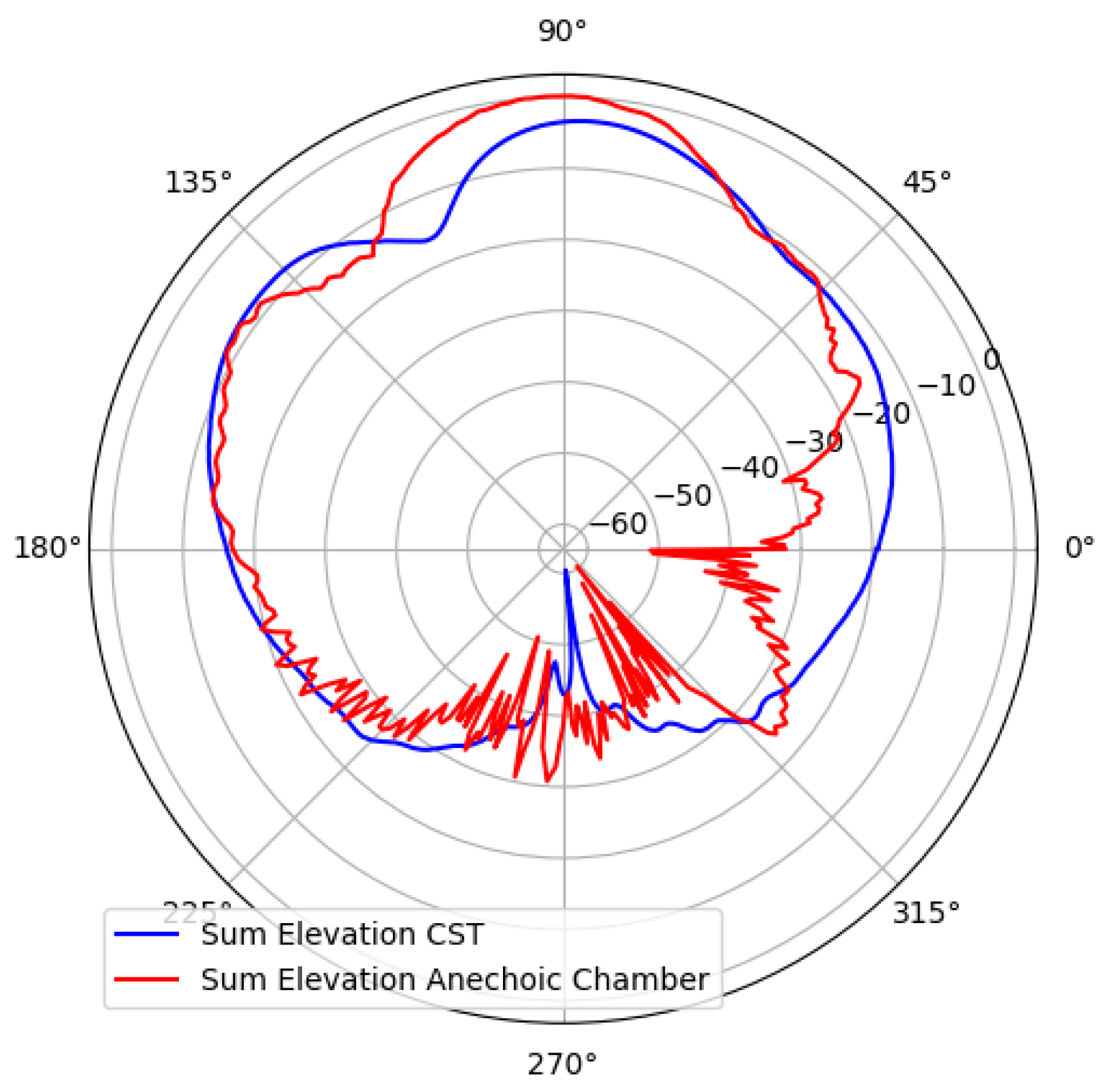
4.2. Results
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AAM | Advanced Air Mobility |
| ACAS | Airborne Collision Avoidance System |
| AoA | Angle of Arrival |
| APL | Antennas and Propagation Lab |
| ARC | Air Risk Class |
| ATAR | Air-to-Air RADAR |
| CA | Collision Avoidance |
| ConOps | Concept of Operation |
| COTS | Commercial-Off-The-Shelf |
| CW-LFM | Continuous Wave, Linearly Frequency Modulated, |
| DAA | Detect and Avoid |
| EEA | European Economic Area |
| EU | European Union |
| EUROCAE | European Organisation for Civil Aviation Equipment |
| FFT | Fast Fourier Transform |
| FOV | Field of Vision |
| GA | General Aviation |
| GRC | Ground Risk Class |
| ICAO | International Civil Aviation Organisation |
| IFR | Instrumental Flight Rules |
| ISM | Industrial, Medical, and Scientific |
| MAC | Mid-Air Collision |
| MOPS | Minimum Operational Performance Standard |
| NMAC | Near Mid-Air Collision |
| OSED | Operational Services and Environment Description |
| RPAS | Remotely Piloted Aircraft Systems |
| RTCA | Radiotechnical Commission for Aeronautics |
| RWC | Remain Well Clear |
| SC | Special Committee |
| SESAR | Single European Sky Air Traffic Management Research |
| SLM | Selective Laser Melting |
| sNMAC | small UAS NMAC |
| SORA | Specific Operations Risk Assessment |
| sUA | Small UA |
| SWaP | Size, Weight, and Power |
| TCR | Tactical Conflict Resolution |
| TRL | Technology Readiness Level |
| VFR | Visual Flight Rules |
| VLL | Very Low Level |
| UA | Unmanned Aircraft |
| UAM | Urban Air Mobility |
| UAS | Unmanned Aircraft System |
| UTM | Unmanned Aircraft System Traffic Management |
References
- International Civil Aviation Organisation. Cir 328, Umanned Aircraft Systems (UAS); International Civil Aviation Organisation: Montréal, QC, Canada, 2011. [Google Scholar]
- Imperial War Museums. Available online: https://www.iwm.org.uk/history/a-brief-history-of-drones (accessed on 17 March 2025).
- Wagner, W. Lightning Bugs, and other Reconnaissance Drones; Aero Publishers, Inc.: Fallbrook, CA, USA, 1982. [Google Scholar]
- European Drones Outlook Study; SESAR JU: Brussels, Belgium, 2016; Available online: https://www.sesarju.eu/sites/default/files/documents/reports/European_Drones_Outlook_Study_2016.pdf (accessed on 17 March 2025).
- ED-267 Operational Services & Environment Description (OSED) for Detect & Avoid in Very Low-Level Operations; European Organisation for Civil Aviation Equipment (EUROCAE): Saint-Denis, France, 2020.
- European Union Aviation Safety Agency. Study on the Societal Acceptance of Urban Air Mobility in Europe; European Union Aviation Safety Agency (EASA): Cologne, Germany, 2021. [Google Scholar]
- Commission Implementing Regulation (EU) 2019/947 of 24 May 2019 on the Rules and Procedures for the Operation of Unmanned Aircraft. Available online: https://eur-lex.europa.eu/eli/reg_impl/2019/947/oj/eng (accessed on 15 March 2025).
- European Union Aviation Safety Agency. Easy Access Rules for Unmanned Aircraft Systems; European Union Aviation Safety Agency (EASA): Cologne, Germany, 2024. [Google Scholar]
- European Union Aviation Safety Agency. EASA Concept for Regulation of Unmanned Aircraft Systems (UAS) Operations in the ‘Certified’ Category and Urban Air Mobility—Issue 3.0; European Union Aviation Safety Agency (EASA): Cologne, Germany, 2021. [Google Scholar]
- Federal Aviation Administration. Concept of Use for the Airborne Collision Avoidance System Xu for Smaller UAS (ACAS sXu); Version 2; Federal Aviation Administration (FAA): Washington, DC, USA, 2020. [Google Scholar]
- International Civil Aviation Organisation. Global Air Traffic Management Operational Concept, 1st ed.; International Civil Aviation Organisation (ICAO): Montréal, QC, Canada, 2005. [Google Scholar]
- Radiotechnical Commission for Aeronautics. DO-396 Minimum Operational Performance Standards for Airborne Collision Avoidance System sXu (ACAS sXu); Radiotechnical Commission for Aeronautics (RTCA): Washington, DC, USA, 2023. [Google Scholar]
- Commission Implementing Regulation (EU) 2021/666 of 22 April 2021 amending Regulation (EU) No 923/2012 as regards requirements for manned aviation operating in U-space airspace. Available online: https://eur-lex.europa.eu/eli/reg_impl/2021/666/oj/eng (accessed on 15 March 2025).
- RTCA Paper No. 261-22/PMC-2336. Radiotechnical Commission for Aeronautics (RTCA). Available online: https://www.rtca.org/wp-content/uploads/2024/07/SC-147-TOR-Rev-20-Approved-2022-09-15-1.pdf (accessed on 17 March 2025).
- International Civil Aviation Organisation. Unmanned Aircraft Systems Traffic Management (UTM)—A Common Framework with Core Principles for Global Harmonization, 4th ed.; International Civil Aviation Organisation: Monteral, QC, Canada, 2023. [Google Scholar]
- UTM Concept of Operations, v2.0, Federal Aviation Administration, v2.0, 2020. Available online: https://www.faa.gov/researchdevelopment/trafficmanagement/utm-concept-operations-version-20-utm-conops-v20 (accessed on 17 March 2025).
- NavCanada. RPAS Traffic Management (RTM) System: Concept of Operations, Version 1.1; NavCanada: Ottawa, ON, USA, 2023; Available online: https://www.navcanada.ca/en/rpas-conops.pdf (accessed on 15 March 2025).
- U-space ConOps and architecture, Ed. 4.0, CORUS-XUAM project, 2023. Available online: https://www.sesarju.eu/node/4544 (accessed on 17 March 2025).
- SESAR Joint Undertaking. European ATM Master Plan, 2020th ed.; SESAR Joint Undertaking: Brussels, Belgium, 2020; Available online: https://www.sesarju.eu/sites/default/files/documents/reports/SESAR%20Master%20Plan%202025.pdf (accessed on 15 March 2025).
- Commission Delegated Regulation (EU) 2019/945 of 12 March 2019 on Unmanned Aircraft Systems and on Third-Country Operators of Unmanned Aircraft Systems. Available online: https://eur-lex.europa.eu/eli/reg_del/2019/945/oj/eng (accessed on 15 March 2025).
- Commission Delegated Regulation (EU) 2020/1058 of 27 April 2020 Amending Delegated Regulation (EU) 2019/945 as Regards the Introduction of Two New Unmanned Aircraft Systems Classes. Available online: https://eur-lex.europa.eu/eli/reg_del/2020/1058/oj/eng (accessed on 15th March 2025).
- Commission Implementing Regulation (EU) 2021/664 of 22 April 2021 on a Regulatory Framework for the U-Space. Available online: https://eur-lex.europa.eu/eli/reg_impl/2021/664/oj/eng (accessed on 15 March 2025).
- Commission Implementing Regulation (EU) 2021/665 of 22 April 2021amending Implementing Regulation (EU) 2017/373 as Regards Requirements for Providers of Air Traffic Management/Air Navigation Services and Other Air Traffic Management Network Functions in the U-Space Airspace Designated in Controlled Airspace. Available online: https://eur-lex.europa.eu/eli/reg_impl/2021/665/oj/eng (accessed on 15 March 2025).
- European Union Aviation Safety Agency. Easy Access Rules for U-Space; European Union Aviation Safety Agency (EASA): Cologne, Germany, 2024. [Google Scholar]
- SESAR Joint Undertaking. European ATM Master Plan, 2025th ed.; SESAR Joint Undertaking: Brussels, Belgium, 2025. [Google Scholar]
- SPATIO. Available online: https://research.dblue.it/spatio/ (accessed on 17 March 2025).
- Radiotechnical Commission for Aeronautics. DO-366 Minimum Operational Performance Standards for Air-to-Air Radar for Traffic Surveillance; Radiotechnical Commission for Aeronautics (RTCA): Washington, DC, USA, 2020. [Google Scholar]
- European Organisation for Civil Aviation Equipment. EUROCAE ED-275—Minimum Operational Performance Standard (MOPS) for ACAS Xu; European Organisation for Civil Aviation Equipment (EUROCAE): Saint-Denis, France, 2019. [Google Scholar]
- International Civil Aviation Organisation. Aeronautical Surveillance Manual (Doc. 9924), 3rd ed.; International Civil Aviation Organisation (ICAO): Montréal, QC, Canada, 2020. [Google Scholar]
- F3442/F3442M-20; Standard Specification for Detect and Avoid System Performance Requirement, The American Society for Test and Materials (ASTM). New York Office: New York, NY, USA, 2020.
- International Telecommunication Union, Article 5 of the ITU Radio Regulations (edition 2012): Geneva, Switzerland. Available online: https://www.itu.int/pub/R-REG-RR (accessed on 15 March 2025).
- IEEE 802.15.1-2005; IEEE Standard for Information Technology—Local and Metropolitan Area Networks—Specific Requirements—Part 15.1a: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Wireless Personal Area Networks (WPAN). IEEE: Piscataway, NJ, USA, 2005.
- IEEE 802.11b-1999; IEEE Standard for Information Technology—Telecommunications and Information Exchange Between Systems—Local and Metropolitan Networks—Specific Requirements—Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) Specifications: Higher Speed Physical Layer (PHY) Extension in the 2.4 GHz Band. IEEE: Piscataway, NJ, USA, 1999.
- Wide Band Solid State Power Amplifier 18 GHz–26.5 GHz. Available online: https://www.rflambda.com/pdf/poweramplifier/RFLUPA18G26GF.pdf (accessed on 17 March 2025).
- ADF5904. 4-Channel, 24 GHz, Receiver Downconverter. Available online: https://www.analog.com/en/products/adf5904.html (accessed on 17 March 2025).
- Skolnik, M.I. Introduction to Radar Systems, 3rd ed.; McGraw-Hill Education: New York, NY, USA, 2000. [Google Scholar]
- Semkin, V.; Haarla, J.; Pairon, T.; Slezak, C.; Viikari, V. Analyzing Radar Cross Section Signatures of Diverse Drone Models at mmWave Frequencies. IEE Access 2020, 8, 48958–48969. [Google Scholar] [CrossRef]
- Mahafza, B.R. Radar Systems Analysis and Desing Using Matlab; Chapman and Hall: London, UK, 2020. [Google Scholar]
- Skolnik, M.I. (Ed.) Radar Handbook, 3rd ed.; McGraw-Hill Education: New York, NY, USA, 2008. [Google Scholar]
- Meikle, H. Modern Radars, 2nd ed.; Artech House: Washington, DC, USA, 2008. [Google Scholar]
- Skolnic, M. Systems Aspects of Digital Beamforming Ubiquitous Radars; Naval Research Laboratory: Washington, DC, USA, 2002. [Google Scholar]
- de Quevedo, Á.D.; Urzaiz, F.I.; Menoyo, J.G.; López, A.A. Drone Detection With X-Band Ubiquitous Radar. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018; pp. 1–10. [Google Scholar] [CrossRef]
- Moses, A.; Rutherford, M.J.; Valavanis, K.P. Radar-based detection and identification for miniature air vehicles. In Proceedings of the 2011 IEEE International Conference on Control Applications (CCA), Denver, CO, USA, 28–30 September 2011; pp. 933–940. [Google Scholar] [CrossRef]
- Hägelen, M.; Jetten, R.; Kulke, R.; Ben, C.; Krüger, M. Monopulse Radar for Obstacle Detection and Autonomous Flight for Sea Rescue UAVs. In Proceedings of the 2018 19th International Radar Symposium (IRS), Bonn, Germany, 20–22 June 2018; pp. 1–7. [Google Scholar] [CrossRef]
- Milias, C.; Andersen, R.B.; Lazaridis, P.I.; Zaharis, Z.D.; Muhammad, B.; Kristensen, J.T.B. End-fire antenna array with metamaterial decoupling structures for UAV-borne radar. In Proceedings of the 2022 3rd URSI Atlantic and Asia Pacific Radio Science Meeting (AT-AP-RASC), Gran Canaria, Spain, 29 May–3 June 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Al, H.; Johnson, D. A Modular Conformal Antenna Array for Wide-Beam SAR and DAA Radars. In Proceedings of the 2023 IEE International Radar Conference, Sydney, Australia, 6–10 November 2023. [Google Scholar] [CrossRef]
- Li, B.; Fei, Z.; Zhang, Y. UAV Communications for 5G and Beyond: Recent Advances and Future Trends. IEEE Internet Things J. 2019, 6, 2241–2263. [Google Scholar] [CrossRef]
- Wilson, N.; Kumar, A.; Jha, A.; Cenkeramaddi, L.R. Multitarget Angle of Arrival Estimation Using Rotating mmWave FMCW Radar and Yolov3. IEEE Sens. J. 2023, 23, 3173–3182. [Google Scholar] [CrossRef]
- Cenkeramaddi, L.R.; Rai, P.K.; Dayal, A.; Bhatia, J.; Soumya, J. A Novel Angle Estimation for mmWave FMCW Radars Using Machine Learning. IEEE Sens. J. 2021, 21, 9833–9843. [Google Scholar] [CrossRef]
- Wang, Z.; Sinha, A.; Willett, P.; Bar-Shalom, Y. Angle estimation for two unresolved targets with monopulse radar. IEEE Trans. Aerosp. Electron. Syst. 2004, 40, 998–1019. [Google Scholar] [CrossRef]
- CST Studio Suite. Available online: https://www.3ds.com/es/products/simulia/cst-studio-suite (accessed on 17 March 2025).
- PCBWay. PCB Prototype the Easy Way. Available online: https://www.pcbway.com (accessed on 17 March 2025).
- G. Technology Readiness Levels (TRL). Available online: https://ec.europa.eu/research/participants/data/ref/h2020/other/wp/2018-2020/annexes/h2020-wp1820-annex-g-trl_en.pdf (accessed on 18 March 2025).



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ruiz Alapont, J.; Ferrando-Bataller, M.; Balbastre, J.V. Proof-of-Concept of a Monopulse Antenna Architecture Enabling Radar Sensors in Unmanned Aircraft Collision Avoidance Systems for UAS in U-Space Airspaces. Appl. Sci. 2025, 15, 5618. https://doi.org/10.3390/app15105618
Ruiz Alapont J, Ferrando-Bataller M, Balbastre JV. Proof-of-Concept of a Monopulse Antenna Architecture Enabling Radar Sensors in Unmanned Aircraft Collision Avoidance Systems for UAS in U-Space Airspaces. Applied Sciences. 2025; 15(10):5618. https://doi.org/10.3390/app15105618
Chicago/Turabian StyleRuiz Alapont, Javier, Miguel Ferrando-Bataller, and Juan V. Balbastre. 2025. "Proof-of-Concept of a Monopulse Antenna Architecture Enabling Radar Sensors in Unmanned Aircraft Collision Avoidance Systems for UAS in U-Space Airspaces" Applied Sciences 15, no. 10: 5618. https://doi.org/10.3390/app15105618
APA StyleRuiz Alapont, J., Ferrando-Bataller, M., & Balbastre, J. V. (2025). Proof-of-Concept of a Monopulse Antenna Architecture Enabling Radar Sensors in Unmanned Aircraft Collision Avoidance Systems for UAS in U-Space Airspaces. Applied Sciences, 15(10), 5618. https://doi.org/10.3390/app15105618