

Development and Experimental Study of a Seamless Morphing Trailing Edge Flap Equipped with an Elephant Trunk Actuation Mechanism


Abstract
1. Introduction
1.1. Literature Review
1.2. Problem Definition
2. Design of Experiment (DOE)
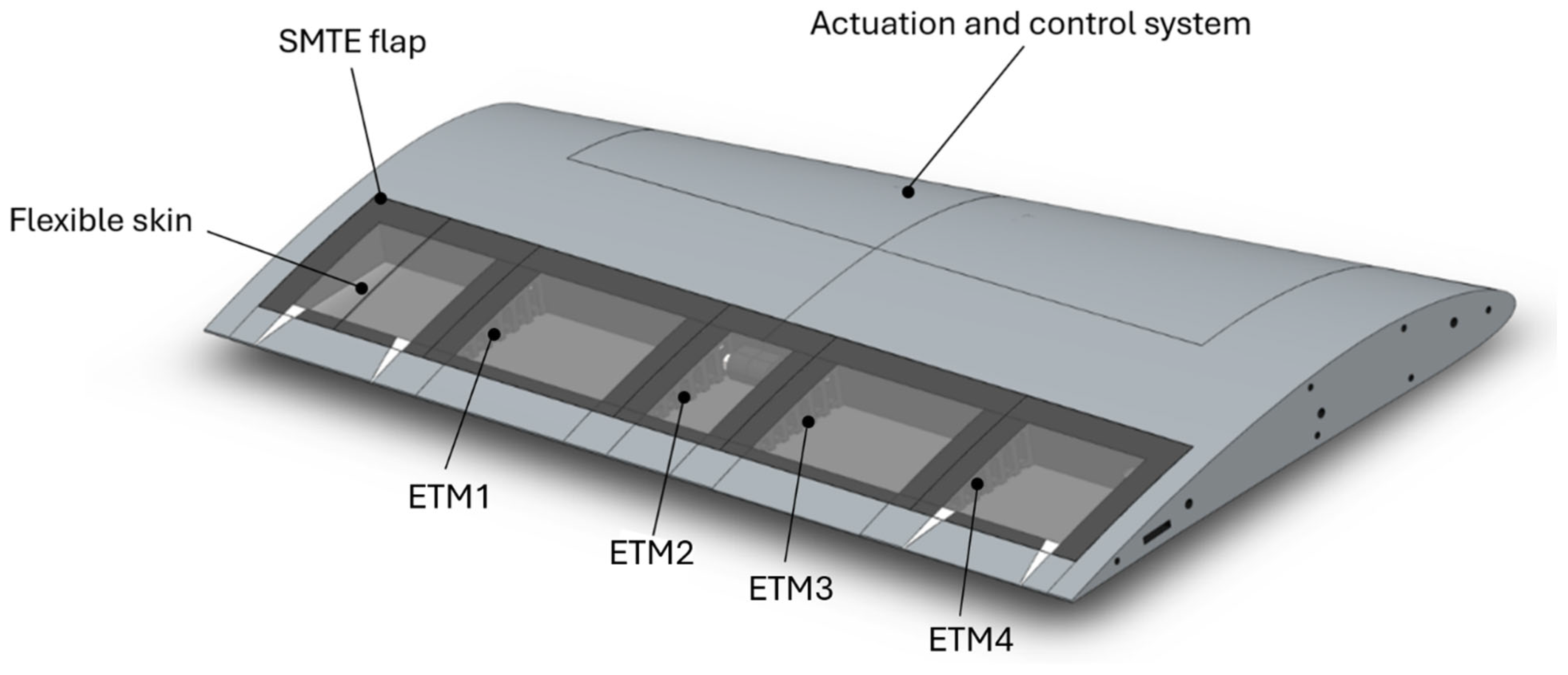
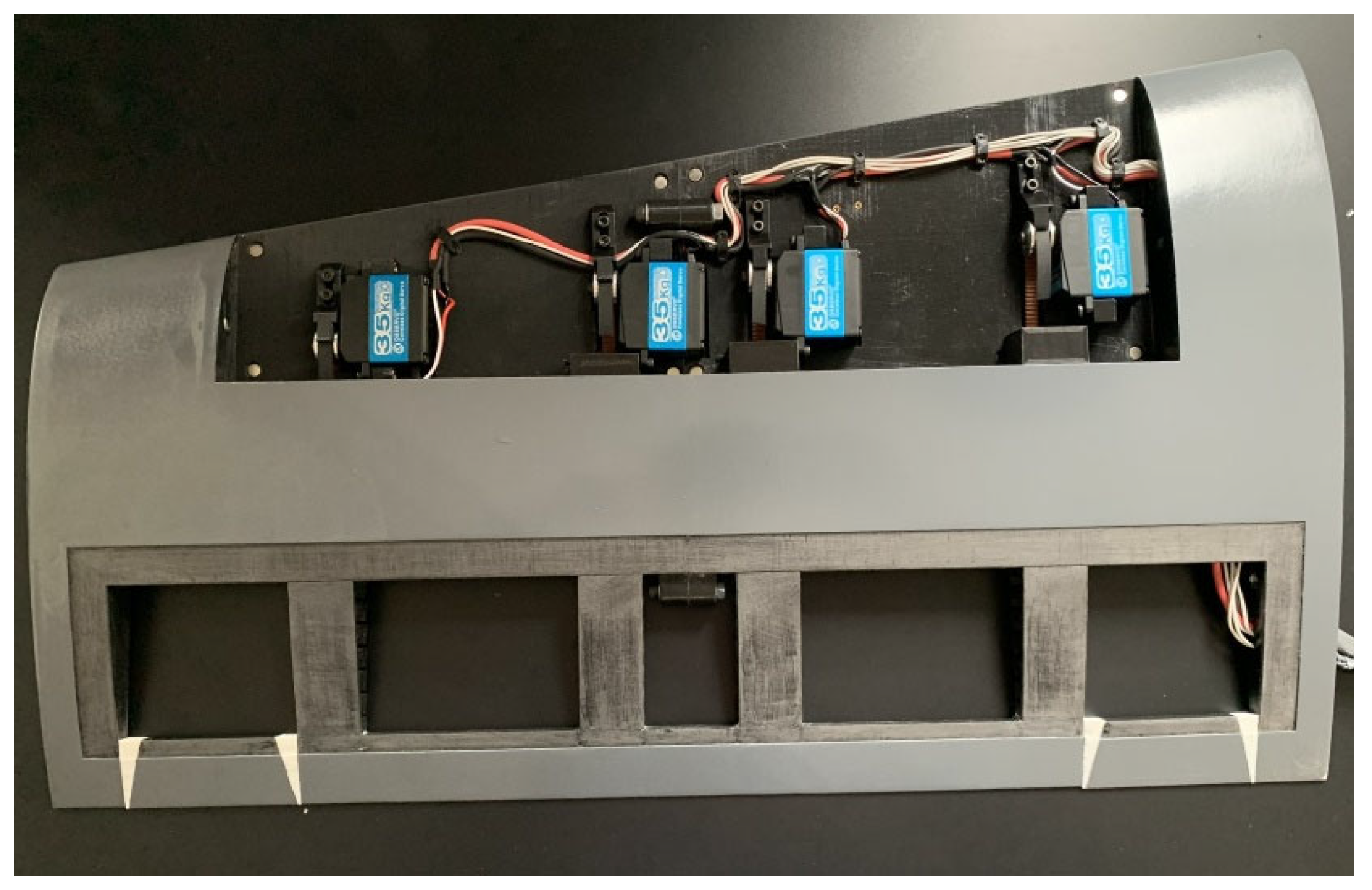
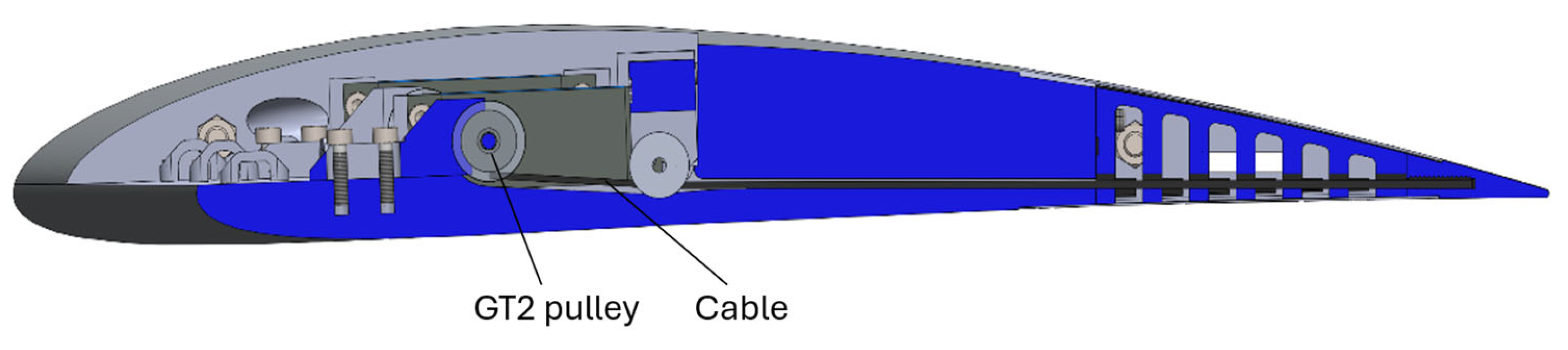
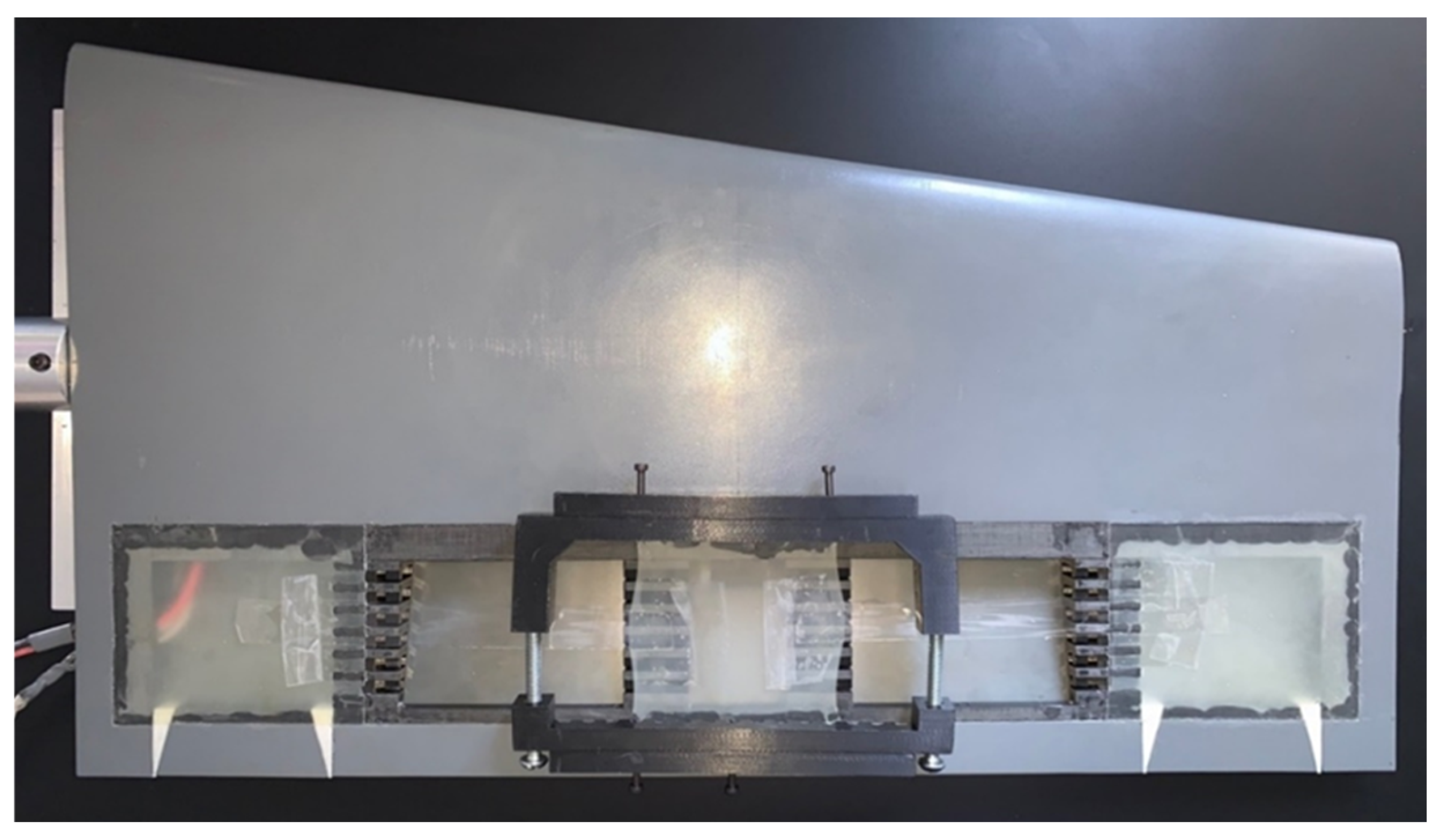
2.1. Prototyping the UAS-S45 Wing Section and Its ETMs
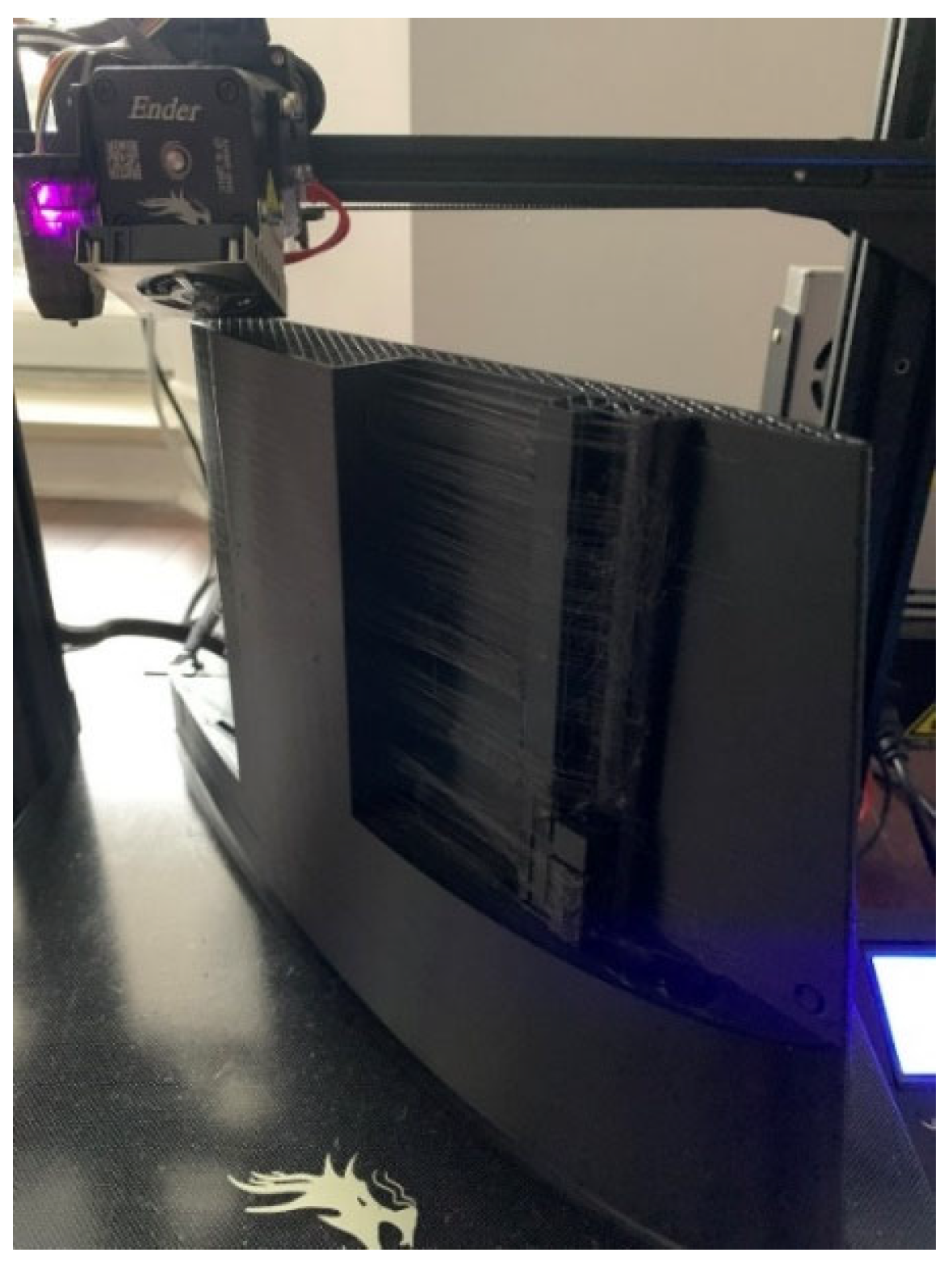
2.2. Printing Setup
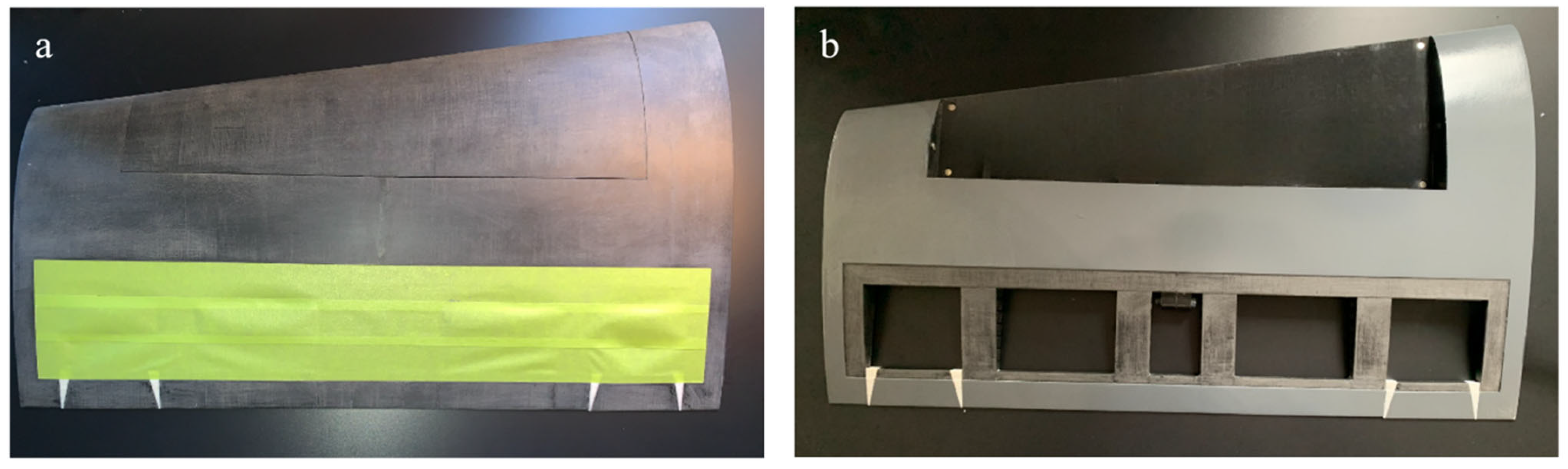
2.3. Post-Printing
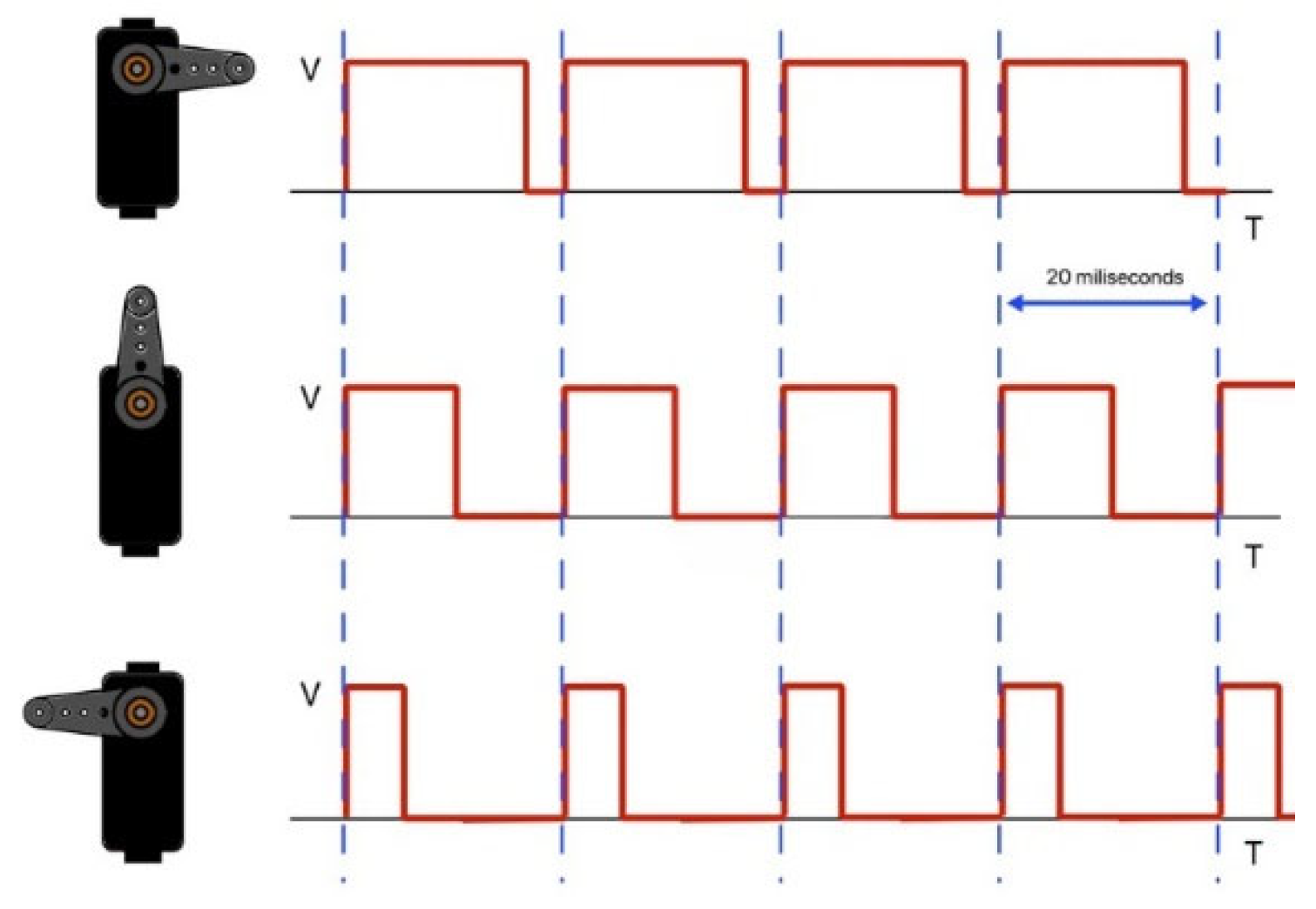
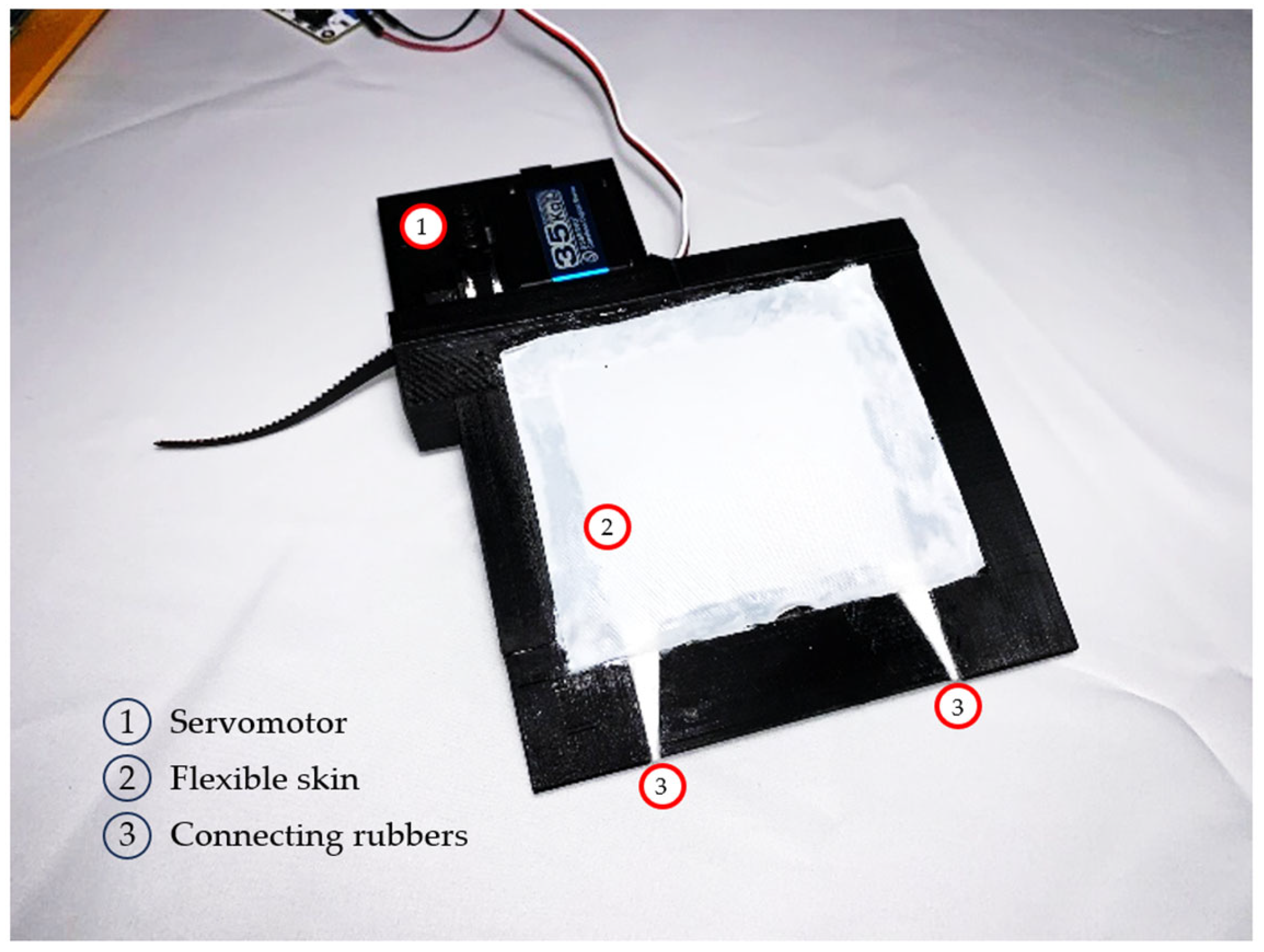
2.4. Actuation Control System
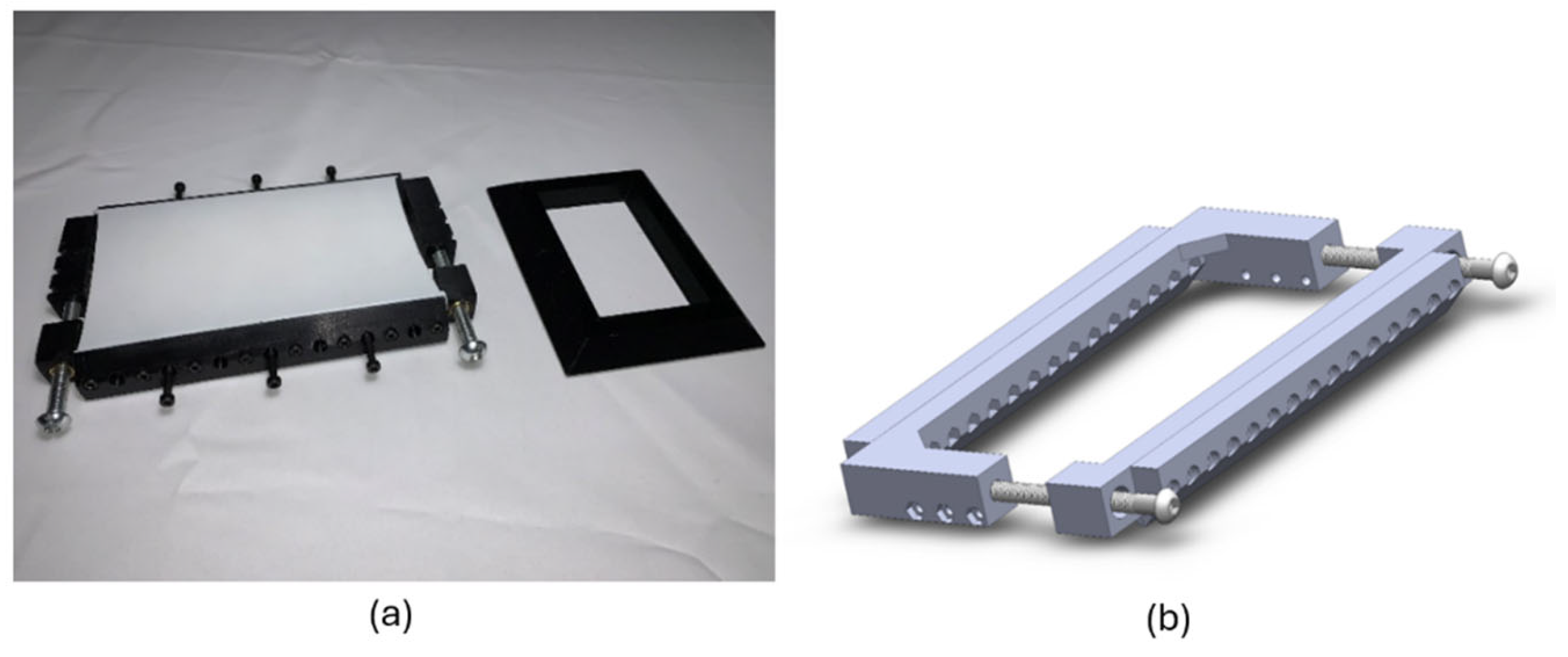
2.5. Implementation of Flexible Skin
2.6. Graphical User Interface (GUI)
- −
- The wing was placed flat on the lower skin on a flat surface (measuring marble), with the flap section extended on a cantilever.
- −
- It was then clamped to the marble, and the precision dial was positioned vertically on the trailing edge.
- −
- The wing was then connected to the Arduino board and the power supply, and the Morphing Wing Controller program was initiated.
- −
- The value of the slider corresponding to the ETM being measured with the precision dial was adjusted.
- −
- This value was incremented by the minimum amount until the needle on the dial moved.
- −
- The value was then incremented backwards, and the reading was recorded.
3. Results and Discussion
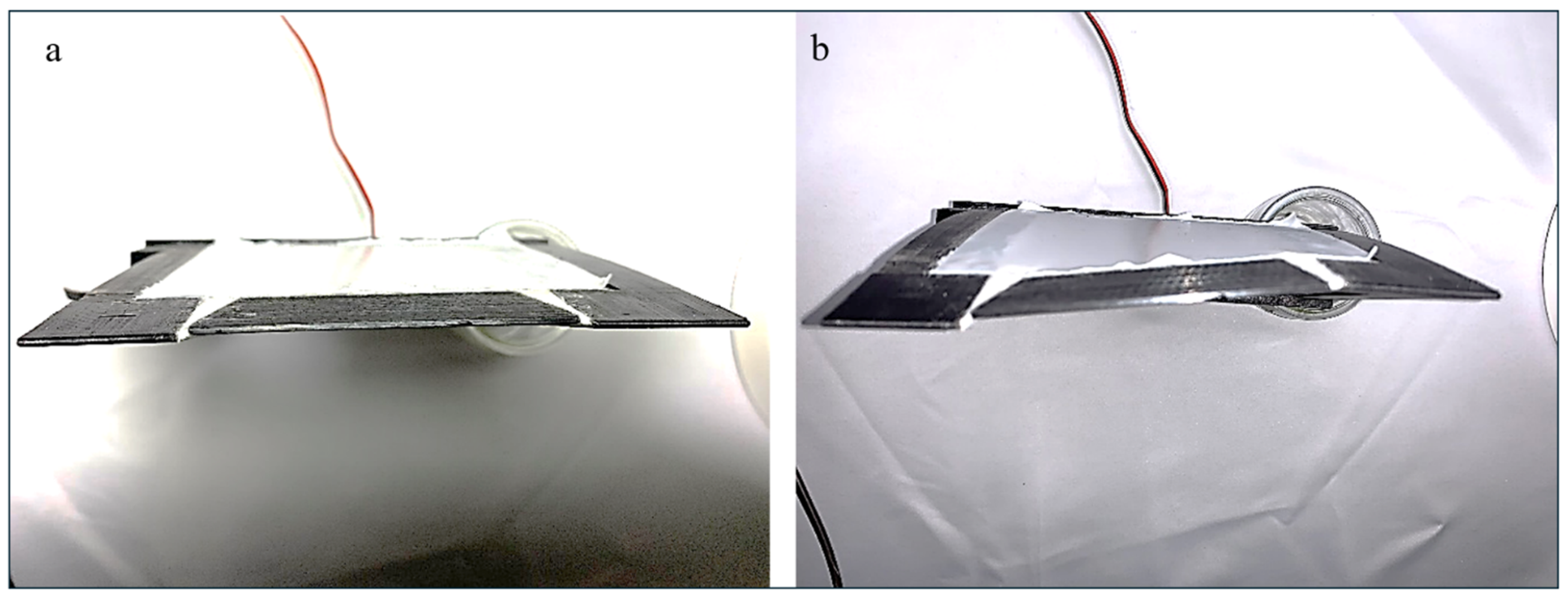
3.1. Pre-Wind Tunnel Evaluations
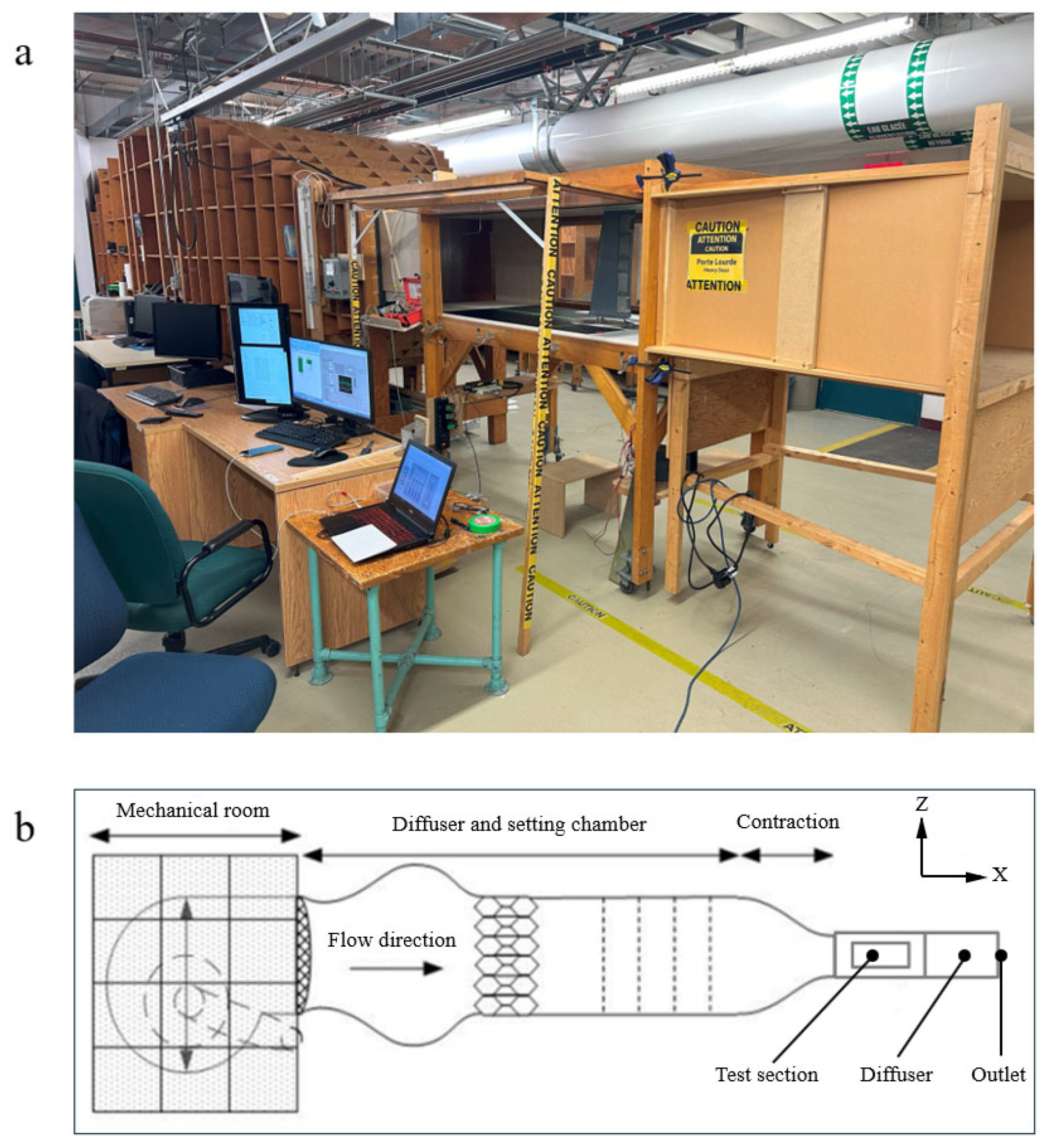
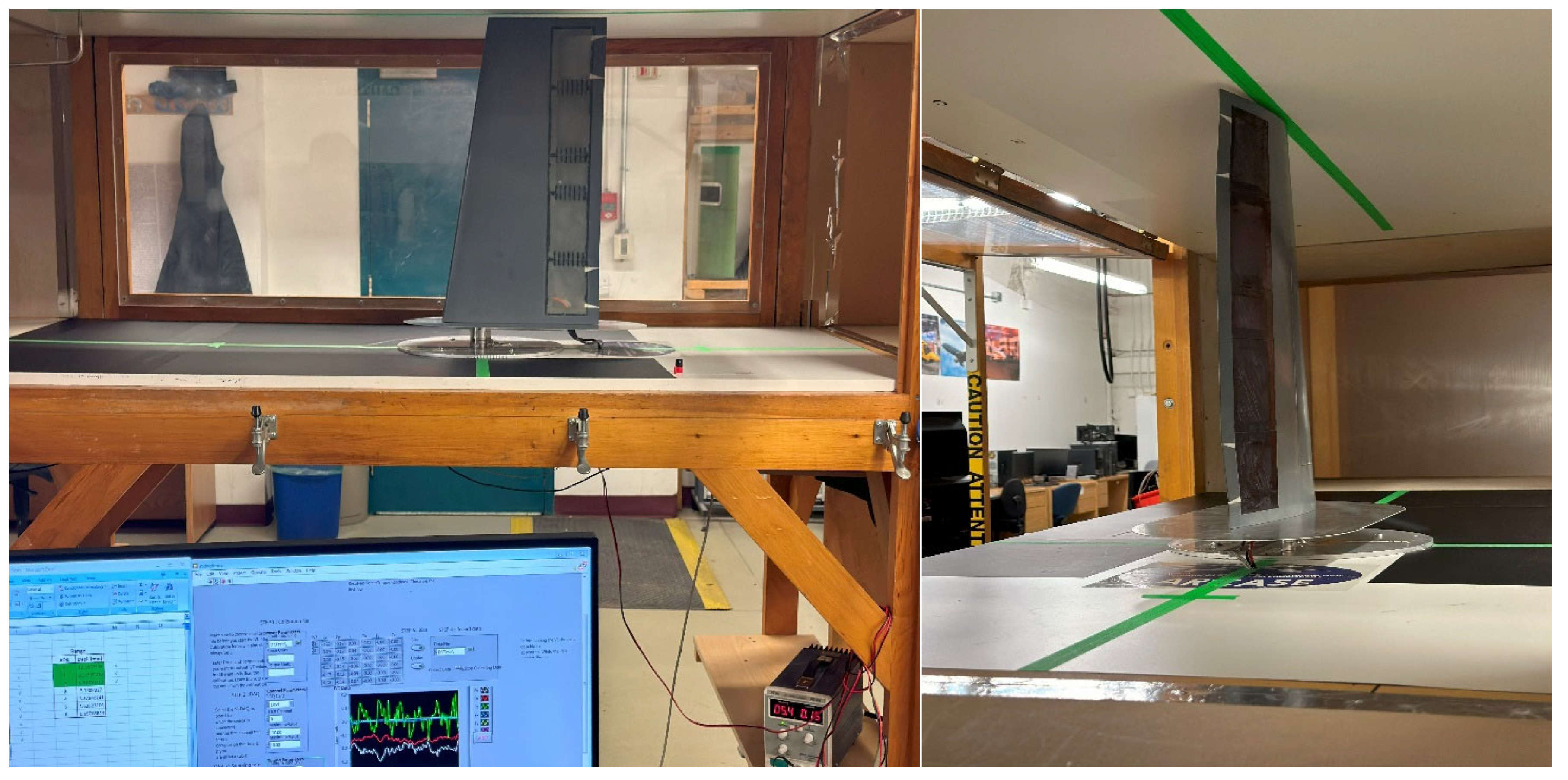
3.2. Price–Païdoussis Subsonic Wind Tunnel
3.3. Wind Tunnel Test Preparation
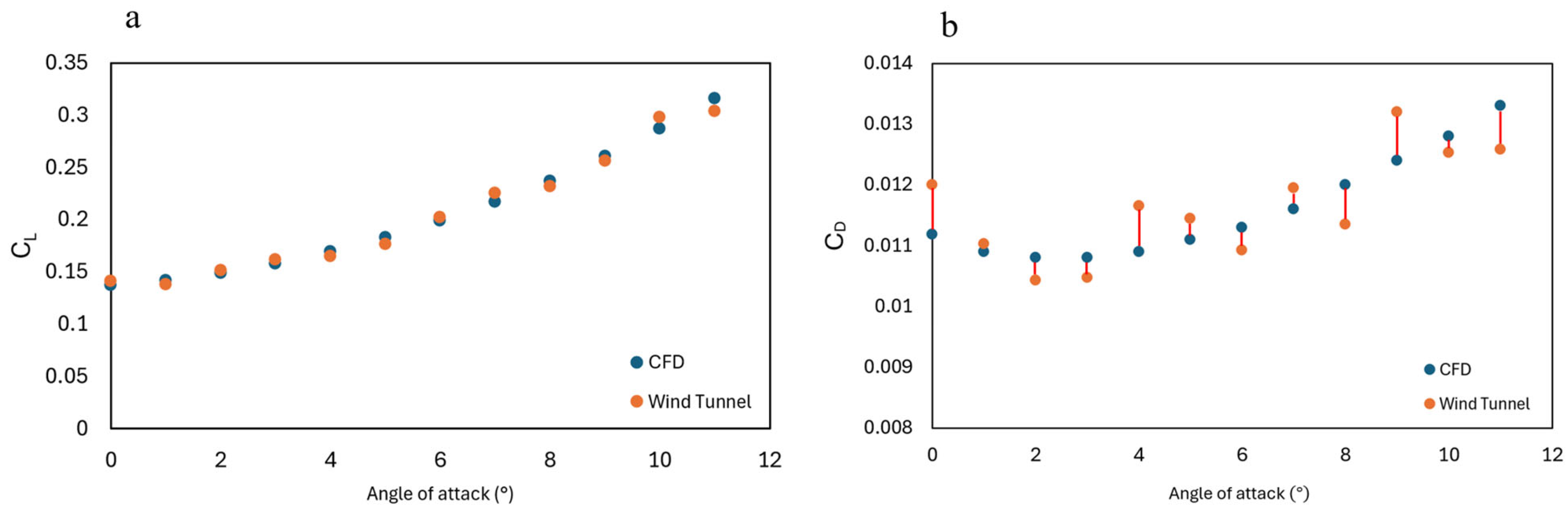
3.4. Wind Tunnel Test Results—Comparison of Numerical and Experimental Data
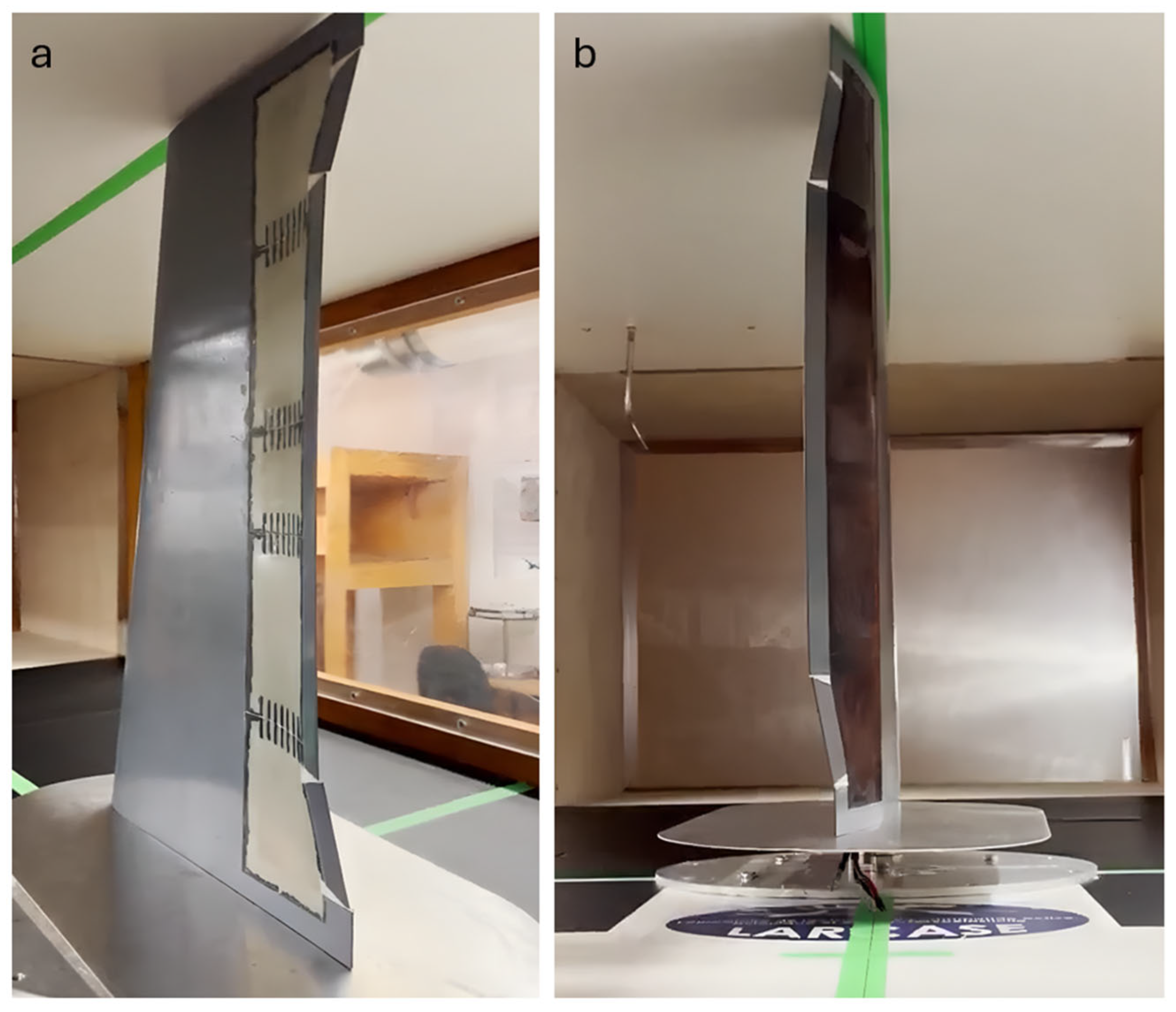
3.5. Wind Tunnel Test Results—Structural Feasibility of ETMs and Flexible Skin
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ameduri, S.; Concilio, A. Morphing wings review: Aims, challenges, and current open issues of a technology. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 4112–4130. [Google Scholar] [CrossRef]
- Barbarino, S.; Bilgen, O.; Ajaj, R.M.; Friswell, M.I.; Inman, D.J. A review of morphing aircraft. J. Intell. Mater. Syst. Struct. 2011, 22, 823–877. [Google Scholar] [CrossRef]
- Wickenheiser, A.M.; Garcia, E. Aerodynamic modeling of morphing wings using an extended lifting-line analysis. J. Aircr. 2007, 44, 10–16. [Google Scholar] [CrossRef]
- Jo, B.W.; Majid, T. Aerodynamic analysis of camber morphing airfoils in transition via computational fluid dynamics. Biomimetics 2022, 7, 52. [Google Scholar] [CrossRef]
- Körpe, D.S. Aerodynamic Modelling and Optimization of Morphing Wings. Ph.D. Thesis, Turkish Aerospace Industries, Ankara, Türkiye, 2014. [Google Scholar]
- Sicim Demirci, M.S.; Pecora, R.; Chianese, L.; Viscardi, M.; Kaya, M.O. Structural Analysis and Experimental Tests of a Morphing-Flap Scaled Model. Aerospace 2024, 11, 725. [Google Scholar] [CrossRef]
- Soneda, K.; Yokozeki, T.; Imamura, T.; Tsushima, N. Aero-structural analysis of corrugated morphing wing with spanwise camber change. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020; p. 0450. [Google Scholar]
- Obradovic, B.; Subbarao, K. Modeling of flight dynamics of morphing wing aircraft. J. Aircr. 2011, 48, 391–402. [Google Scholar] [CrossRef]
- Xiao, K.; Chen, Y.; Jiang, W.; Wang, C.; Zhao, L. Modeling, simulation and implementation of a bird-inspired morphing wing aircraf. In Proceedings of the 2019 3rd International Conference on Robotics and Automation Sciences (ICRAS), Wuhan, China, 1–3 June 2019; pp. 238–243. [Google Scholar]
- Liauzun, C.; Le Bihan, D.; David, J.-M.; Joly, D.; Paluch, B. Study of Morphing Winglet Concepts Aimed at Improving Load Control and the Aeroelastic Behavior of Civil Transport Aircraft; Aerospace Lab: Bangalore, India, 2018; pp. 1–15. [Google Scholar]
- Dimino, I.; Flauto, D.; Diodati, G.; Concilio, A.; Pecora, R. Actuation system design for a morphing wing trailing edge. Recent Pat. Mech. Eng. 2014, 7, 138–148. [Google Scholar] [CrossRef]
- Wang, Q.; Xu, Z.; Zhu, Q. Structural design of morphing trailing edge actuated by SMA. Front. Mech. Eng. 2013, 8, 268–275. [Google Scholar] [CrossRef]
- Campanile, L.; Sachau, D. The belt-rib concept: A structronic approach to variable camber. J. Intell. Mater. Syst. Struct. 2000, 11, 215–224. [Google Scholar] [CrossRef]
- Bourchak, M.; Ajaj, R.; Flores, E.S.; Khalid, M.; Juhany, K. Optimum design of a PID controller for the adaptive torsion wing. Aeronaut. J. 2015, 119, 871–889. [Google Scholar] [CrossRef]
- Parancheerivilakkathil, M.S.; Pilakkadan, J.S.; Amoozgar, M.; Asadi, D.; Zweiri, Y.; Friswell, M.I. A review of control strategies used for morphing aircraft applications. Chin. J. Aeronaut. 2024, 37, 436–463. [Google Scholar] [CrossRef]
- Fonzi, N.; Brunton, S.L.; Fasel, U. Data-driven nonlinear aeroelastic models of morphing wings for control. Proc. R. Soc. A 2020, 476, 20200079. [Google Scholar] [CrossRef] [PubMed]
- Moosavian, A.; Xi, F.; Hashemi, S.M. Design and motion control of fully variable morphing wings. J. Aircr. 2013, 50, 1189–1201. [Google Scholar] [CrossRef]
- Özel, C.; Özbek, E.; Ekici, S. A review on applications and effects of morphing wing technology on uavs. Int. J. Aviat. Sci. Technol. 2020, 1, 30–40. [Google Scholar] [CrossRef]
- Sofla, A.; Meguid, S.; Tan, K.; Yeo, W. Shape morphing of aircraft wing: Status and challenges. Mater. Des. 2010, 31, 1284–1292. [Google Scholar] [CrossRef]
- Jha, A.K.; Kudva, J.N. Morphing aircraft concepts, classifications, and challenges. In Proceedings of the Smart Structures and Materials 2004: Industrial and Commercial Applications of Smart Structures Technologies, San Diego, CA, USA, 16–18 March 2004; pp. 213–224. [Google Scholar]
- Kota, S.; Osborn, R.; Ervin, G.; Maric, D.; Flick, P.; Paul, D. Mission adaptive compliant wing–design, fabrication and flight test. In Proceedings of the RTO Applied Vehicle Technology Panel (AVT) Symposium, Bonn, Germany, 19–22 October 2009; pp. 1–18. [Google Scholar]
- Botez, R.M.; Koreanschi, A.; Gabor, O.S.; Tondji, Y.; Guezguez, M.; Kammegne, J.; Grigorie, L.; Sandu, D.; Mebarki, Y.; Mamou, M. Numerical and experimental transition results evaluation for a morphing wing and aileron system. Aeronaut. J. 2018, 122, 747–784. [Google Scholar] [CrossRef]
- Popov, A.V.; Grigorie, L.T.; Botez, R.; Mamou, M.; Mebarki, Y. Closed-loop control validation of a morphing wing using wind tunnel tests. J. Aircr. 2010, 47, 1309–1317. [Google Scholar] [CrossRef]
- Carossa, G.M.; Ricci, S.; De Gaspari, A.; Liauzun, C.; Dumont, A.; Steinbuch, M. Adaptive trailing edge: Specifications, aerodynamics, and exploitation. In Proceedings of the Smart Intelligent Aircraft Structures (SARISTU), Proceedings of the Final Project Conference, Moscow, Russia, 19–21 May 2015; pp. 143–158. [Google Scholar]
- Ameduri, S.; Concilio, A.; Dimino, I.; Pecora, R.; Ricci, S. AIRGREEN2-clean sky 2 programme: Adaptive Wing technology maturation, challenges and perspectives. Smart Mater. Adapt. Struct. Intell. Syst. 2018, 51944, V001T004A023. [Google Scholar]
- Kota, S.; Flick, P.; Collier, F.S. Flight testing of flexfloiltm adaptive compliant trailing edge. In Proceedings of the 54th AIAA Aerospace Sciences Meeting, San Diego, CA, USA, 4–8 January 2016; p. 0036. [Google Scholar]
- Zhigang, W.; Xiasheng, S.; Yu, Y.; Wenjie, G.; Daochun, L.; Xiang, J.; Panpan, B.; Qi, W.; Da Ronch, A. Design optimization and testing of a morphing leading-edge with a variable-thickness compliant skin and a closed-chain mechanism. Chin. J. Aeronaut. 2024, 37, 285–300. [Google Scholar]
- Communier, D.; Le Besnerais, F.; Botez, R.M.; Wong, T. Design, manufacturing, and testing of a new concept for a morphing leading edge using a subsonic blow down wind tunnel. Biomimetics 2019, 4, 76. [Google Scholar] [CrossRef]
- Jia, S.; Zhang, Z.; Zhang, H.; Song, C.; Yang, C. Wind tunnel tests of 3D-Printed variable camber morphing wing. Aerospace 2022, 9, 699. [Google Scholar] [CrossRef]
- Ricci, S.; De Gaspari, A.; Riccobene, L. Design, manufacturing and wind tunnel test of a morphing wing based on compliant structures. In Proceedings of the 24th AIAA/AHS Adaptive Structures Conference, San Diego, CA, USA, 4–8 January 2016; p. 1316. [Google Scholar]
- Dimino, I.; Galasso, B.; Guida, M.; Miceli, M.; Riemenschneider, J.; Kalow, S.; Luebker, J. Whirl Tower Demonstration of an SMA Blade Twist System. Actuators 2022, 11, 141. [Google Scholar] [CrossRef]
- Jeong, J.; Bae, J.-S. Wind tunnel & Flight Test of VCCS Morphing UAV. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 1424–1431. [Google Scholar]
- Botez, R.M.; Koreanschi, A.; Oliviu, S.G.; Mebarki, Y.; Mamou, M.; Tondji, Y.; Amoroso, F.; Pecora, R.; Lecce, L.; Amendola, G. Numerical and experimental testing of a morphing upper surface wing equipped with conventional and morphing ailerons. In Proceedings of the 55th AIAA Aerospace Sciences Meeting, Grapevine, TX, USA, 9–13 January 2017; p. 1425. [Google Scholar]
- Groves-Raines, M.M.; Araujo-Estrada, S.A.; Mohamed, A.; Watkins, S.; Windsor, S.P. Wind tunnel testing of an avian-inspired morphing wing with distributed pressure sensing. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 290–299. [Google Scholar]
- Salinas, M.F.; Botez, R.M.; Gauthier, G. New validation methodology of an adaptive wing for UAV S45 for fuel reduction and climate improvement. Appl. Sci. 2023, 13, 1799. [Google Scholar] [CrossRef]
- Negahban, M.H.; Bashir, M.; Traisnel, V.; Botez, R.M. Seamless morphing trailing edge flaps for UAS-S45 using high-fidelity aerodynamic optimization. Chin. J. Aeronaut. 2024, 37, 12–29. [Google Scholar] [CrossRef]
- Negahban, M.H.; Hallonet, A.; Noupoussi Woumeni, M.; Nguyen, C.; Botez, R.M. Structural and Topological Optimization of a Novel Elephant Trunk Mechanism for Morphing Wing Applications. Aerospace 2025, 12, 381. [Google Scholar] [CrossRef]
- Moulton, B.C. 3D-Printed Morphing Wings for Controlling Yaw on Flying-Wing Aircraft. Master of Science, Utah State University, Logan, UT, USA, 2021. [Google Scholar]
- Rivero, A.E.; Fournier, S.; Heeb, R.M.; Woods, B.K. Design, manufacture and wind tunnel test of a modular FishBAC wing with novel 3D printed skins. Appl. Sci. 2022, 12, 652. [Google Scholar] [CrossRef]
- Farnell. PLA+ Filament. Available online: https://www.farnell.com/datasheets/3775310.pdf (accessed on 13 February 2025).
- Khalid, M.; Juhany, K.A.; Hafez, S. Computational modeling of the flow in a wind tunnel. Aircr. Eng. Aerosp. Technol. 2018, 90, 175–185. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value |
|---|---|
| Density (g/cm3) | 1.23 |
| Melt Flow Index (190 °C/2.16 kg) | 5 |
| Tensile Strength (MPa) | 63 |
| Elongation at Break (%) | 20 |
| Flexural Strength (MPa) | 74 |
| Flexural Modulus (MPa) | 1973 |
| Heat Distortion Temperature (°C) | 53 |
| Young’s Modulus (MPa) | Poisson’s Ratio | Density (kg/m3) | Yield Strength (MPa) |
|---|---|---|---|
| 2960 | 0.41 | 1140 | 75 |
| Property | Value |
|---|---|
| Layer height (mm) | 0.2 |
| Line width (mm) | 0.4 |
| Wall thickness (mm) | 2 |
| Top/bottom thickness (mm) | 2 |
| Infill density (%) | 30 |
| Printing temperature (°C) | 200 |
| Build plate temperature (°C) | 60 |
| Print speed (mm/s) | 50 |
| Wall print speed (mm/s) | 15 |
| Build plate adhesion type | Brim |
| Young’s Modulus (MPa) | Poisson Ratio | Tensile Yield Strength (MPa) | Density (kg/m3) |
|---|---|---|---|
| 17 | 0.5 | 10.4 | 1230 |
| Air Density (Kg/m3) | Temperature (°C) | Relative Humidity (%) | Air Speed (m/s) | Pressure (kPa) |
|---|---|---|---|---|
| 1.19 | 22.6 | 34 | 28.3 | 101.6 |
| AOA (°) | Flap Vertical Displacement (mm) | CFD | Wind Tunnel | Error (%) | |||
|---|---|---|---|---|---|---|---|
| CL | CD | CL | CD | CL | CD | ||
| 0 | 30.815 | 0.1371 | 0.0110 | 0.1412 | 0.01201 | 3.98 | 7.30 |
| 1 | 25.132 | 0.1418 | 0.0109 | 0.1380 | 0.01103 | 3.03 | 1.20 |
| 2 | 20.630 | 0.1487 | 0.0108 | 0.1515 | 0.01043 | 1.69 | 3.46 |
| 3 | 17.594 | 0.1579 | 0.0108 | 0.1613 | 0.01047 | 3.91 | 3.02 |
| 4 | 15.086 | 0.1694 | 0.0109 | 0.1648 | 0.01165 | 2.39 | 6.87 |
| 5 | 13.405 | 0.1829 | 0.0111 | 0.1762 | 0.01144 | 3.40 | 3.04 |
| 6 | 11.419 | 0.1985 | 0.0113 | 0.2021 | 0.01092 | 4.04 | 3.36 |
| 7 | 10.734 | 0.2165 | 0.0116 | 0.2251 | 0.01195 | 0.88 | 3.02 |
| 8 | 10.062 | 0.2370 | 0.0120 | 0.2313 | 0.01135 | 1.02 | 5.38 |
| 9 | 8.030 | 0.2603 | 0.0124 | 0.2557 | 0.01320 | 4.06 | 6.45 |
| 10 | 5.157 | 0.2865 | 0.0128 | 0.2974 | 0.01253 | 2.18 | 2.12 |
| 11 | 3.048 | 0.3157 | 0.0133 | 0.3032 | 0.01258 | 1.93 | 5.40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Negahban, M.H.; Saci, T.; Botez, R.M. Development and Experimental Study of a Seamless Morphing Trailing Edge Flap Equipped with an Elephant Trunk Actuation Mechanism. Appl. Sci. 2025, 15, 5570. https://doi.org/10.3390/app15105570
Negahban MH, Saci T, Botez RM. Development and Experimental Study of a Seamless Morphing Trailing Edge Flap Equipped with an Elephant Trunk Actuation Mechanism. Applied Sciences. 2025; 15(10):5570. https://doi.org/10.3390/app15105570
Chicago/Turabian StyleNegahban, Mir Hossein, Tarek Saci, and Ruxandra Mihaela Botez. 2025. "Development and Experimental Study of a Seamless Morphing Trailing Edge Flap Equipped with an Elephant Trunk Actuation Mechanism" Applied Sciences 15, no. 10: 5570. https://doi.org/10.3390/app15105570
APA StyleNegahban, M. H., Saci, T., & Botez, R. M. (2025). Development and Experimental Study of a Seamless Morphing Trailing Edge Flap Equipped with an Elephant Trunk Actuation Mechanism. Applied Sciences, 15(10), 5570. https://doi.org/10.3390/app15105570