1. Introduction
The continuous rise in greenhouse gas emissions has exacerbated global warming and climate change, which are crucial environmental challenges that require immediate international action [
1]. Consequently, various countries have established carbon neutrality (Net-Zero) targets and implemented strong policies aimed at reducing greenhouse gas emissions. In particular, the transportation sector faces significant pressure owing to high carbon emissions [
2]. According to the International Energy Agency (IEA), the transportation sector accounts for 16% of the total greenhouse gas emissions, with maritime shipping accounting for approximately 3% [
3,
4]. Reports indicate that a single large vessel can emit hundreds of thousands of tons of greenhouse gases annually, highlighting the necessity for developing emission reduction technologies within shipping industries [
5,
6,
7,
8,
9,
10].
To address this, the International Maritime Organization (IMO) has set a target to reduce carbon emissions in international shipping by 100% by 2050 relative to emission levels in 2008. To achieve this objective, progressively stringent environmental regulations are being implemented. These enhanced regulations have significantly increased the difficulty of operating conventional internal combustion engine vessels, making it essential to develop technological alternatives. Among these, electric propulsion ships have gained considerable attention as a leading ecofriendly option. Unlike vessels based on conventional internal combustion engines, electric propulsion ships employ electrical energy, thereby eliminating emissions associated with fossil fuel combustion. They also present advantages such as improved energy efficiency and precise propulsion control [
11,
12,
13].
Furthermore, electric propulsion ships are effective in reducing exhaust gases, thereby emerging as a realistic alternative to meet IMO regulations. The high-power conversion efficiency of the propulsion motors can reduce operating costs. Additionally, motor-driven propulsion systems generate less noise and vibration than internal combustion engines. This enhances the comfort of both the passengers and crew members. Consequently, major shipyards and shipping companies worldwide are actively pursuing the commercialization of electric propulsion ships. Government support for the research and development of these sectors has also been expanding. The advancement of electric propulsion ship technology is projected to become a significant factor in transforming the shipping industry in conjunction with the strengthening of environmental regulations [
14,
15].
The performance of electric propulsion ships is primarily determined by the efficient control of propulsion motors, which relies on optimized inverters. An inverter functions as a power conversion device that transforms the power generated from generators or batteries into a variable frequency alternating current that is suitable for motors. The power conversion efficiency increases with the improvement in the inverter performance, thereby enhancing the overall energy efficiency and stability of electric propulsion ships.
The control method is a major factor in determining the inverter performance. Different inverter control methods present variations in the output voltage quality, power conversion loss, and motor torque response characteristics. Optimizing these aspects is a major challenge.
Several inverter control methods have been analyzed, including pulse width modulation (PWM) [
16,
17,
18], proportional-integral (PI) control [
19,
20,
21], sliding mode control (SMC) [
22,
23,
24], fuzzy logic control (FLC) [
25,
26,
27], and MPC [
28,
29,
30]. PWM involves controlling the voltage by adjusting the switching cycles. This method is widely used and is relatively simple to implement; however, it suffers from increased switching losses. PI controllers feature simple structures and easy implementation. However, they require control gain reconfiguration when the operating conditions vary and exhibit reduced performance in nonlinear systems. Furthermore, they cannot ensure optimal control performance in systems that require a high dynamic response owing to their slow transient response speeds. SMC achieves robust control performance, but it presents considerable implementation complexity. It also faces a high risk of chattering owing to discontinuities in the control inputs. In applications that require high switching frequencies, SMC may increase the switching noise and losses. The FLC demonstrates excellent adaptability in nonlinear systems. However, designing fuzzy rules is challenging, and it involves considerable trial and error. The computational demands increase with the increase in the number of control rules, thereby potentially complicating real-time control. Additionally, the fuzzy rules may require reconfiguration when the system dynamic characteristics vary. Conversely, MPC can overcome the limitations of conventional control methods by determining the optimal control inputs by predicting the future system states. It maintains a high-control performance under various operating conditions. Recently, MPC has gained considerable attention as an inverter control method. However, conventional MPC approaches face various challenges. Firstly, a low switching frequency can increase the current error and total harmonic distortion (THD) [
31,
32]. Secondly, increasing the switching frequency to improve the current error and THD can cause higher switching losses [
28,
33,
34]. To address these issues, ref. [
35] introduced a virtual voltage vector technique to reduce the THD. However, this approach increased the switching loss. Therefore, a new inverter control technique must be developed to maintain the current quality while reducing switching losses.
In this study, we proposed an MPC approach that incorporates discontinuous switching and zero-voltage vector selection to overcome the switching loss problems. Based on the comparison of the current and voltage magnitudes, we reduced the switching losses via discontinuous switching in the regions where the current values were maximum. Additionally, we suppressed unnecessary switching by selecting the optimal zero-voltage vectors based on the polarity of the calculated offset voltage for discontinuous switching. The proposed method employed multi-vector approaches with virtual voltage vectors to improve the current quality. Simultaneously, we applied discontinuous switching to effectively decrease the switching losses. This dual approach enhanced the inverter output performance and efficiency by improving the current distortion and reducing switching losses. The proposed method was verified via simulations and experimental tests.
These improvements help in optimizing the inverter performance and increasing the power conversion efficiency, thereby increasing the reliability of the entire electric propulsion system. The proposed Discontinuous MPC method presents more flexible operational characteristics than conventional inverter control methods and consistently maintains a stable performance across various load conditions.
This helps in advancing eco-friendly ship technology and presents considerable potential for applications across several industrial sectors where power conversion plays a crucial role. The broad applicability of the proposed approach extends beyond maritime applications to other fields that require efficient power conversion systems.
The remainder of this paper is organized as follows.
Section 2 analyzes the limitations of conventional inverter control methods and MPC, focusing on current quality degradation and increased switching losses.
Section 3 proposes an MPC that applies discontinuous switching, detailing the principles underlying the improvement of current distortion while reducing losses.
Section 4 verifies the performance of the proposed technique via simulations and experiments, analyzing the improved current quality and reduced switching losses when compared with conventional MPCs. Finally,
Section 5 summarizes the research results and presents the future research implications.
3. Proposed Discontinuous Model Predictive Control with Zero Vector Selection
We propose a discontinuous MPC (D-MPC) that minimizes the switching losses by setting discontinuous intervals based on the current magnitude. We improve the current error and THD by using the multi-vector approach presented by Chae and Roh’s research [
35] while reducing switching losses through D-MPC [
39,
40]. The zero-voltage vectors,
V7 and
V0, are selected based on the polarity of the offset voltage calculated for discontinuous switching, thereby suppressing unnecessary switching.
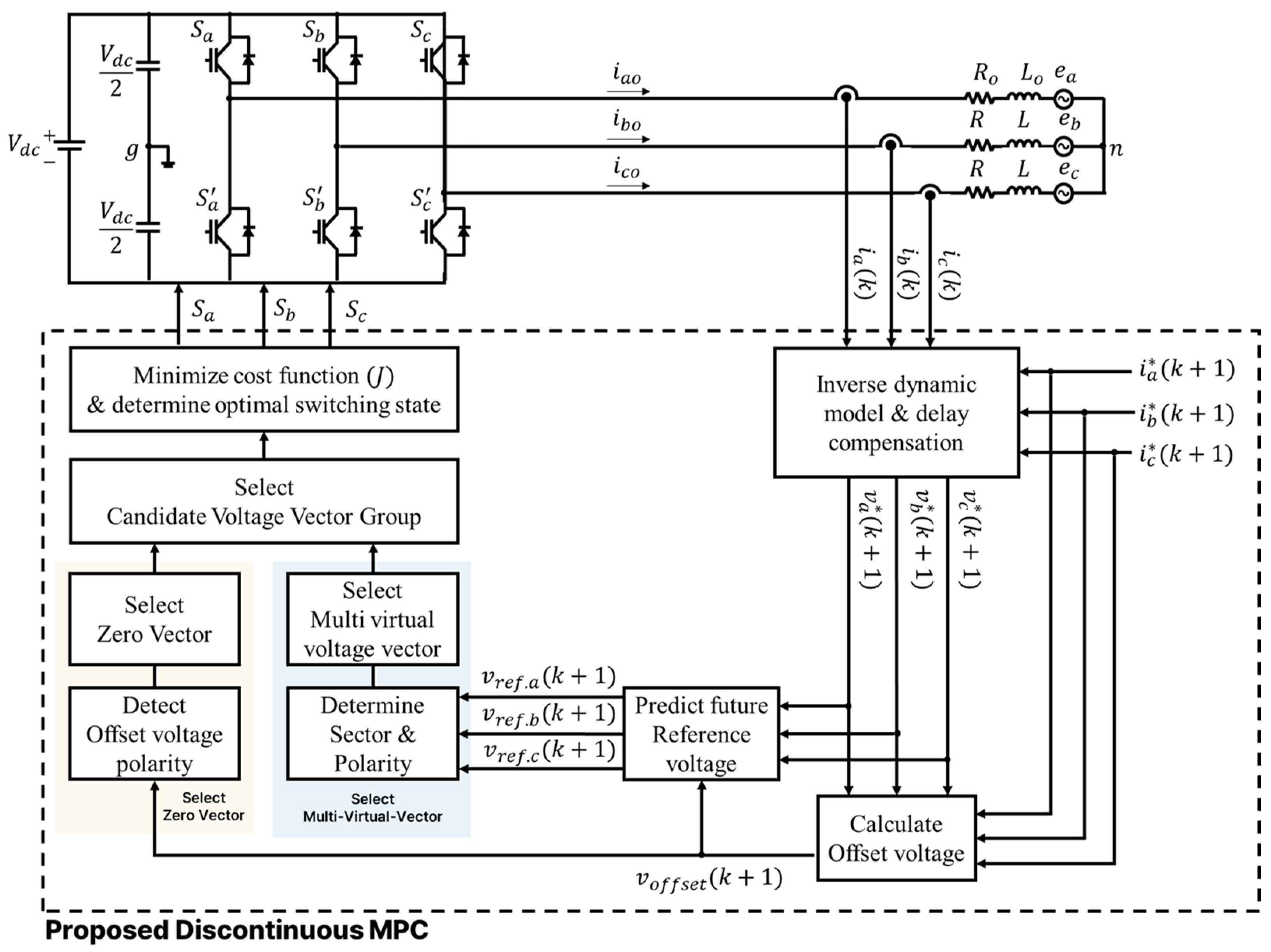
Figure 4 depicts a Block diagram of the proposed D-MPC.
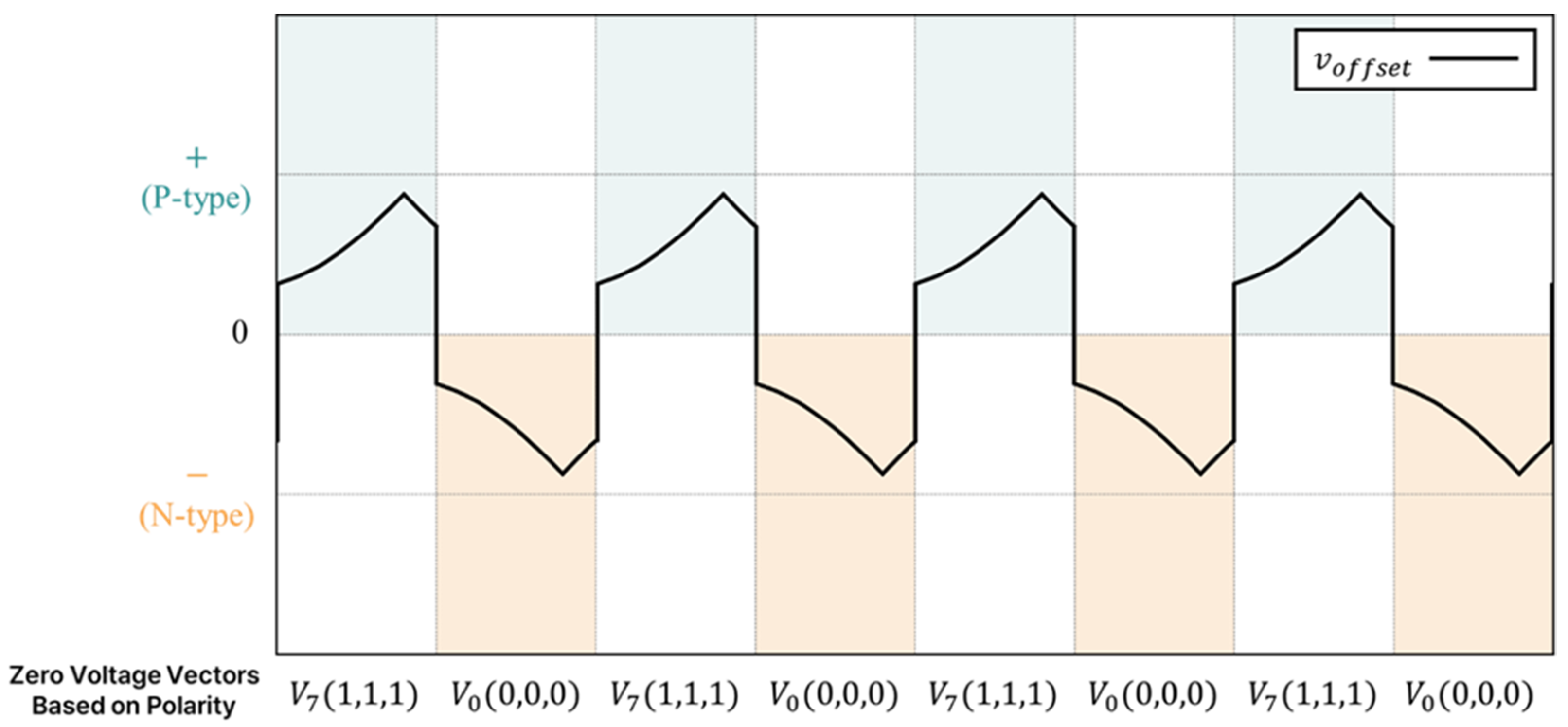
Switching losses are proportional to the magnitude of the load current flowing through the inverter leg during switching. The proposed D-MPC applies discontinuous switching by determining sections with the highest current and voltage magnitudes. By adding an offset voltage to the future reference voltage, the voltage in the maximum current sections is fixed at +Vdc/2 or −Vdc/2. The switching losses are reduced by clamping the phase with the maximum current to either a positive or a negative DC link.
Additionally, the proposed method selects an optimal zero-voltage vector by utilizing the offset voltage polarity. Although the zero-voltage vectors, V7 and V0, share the same magnitude of zero, their switching states vary as (111) and (000), respectively. The improper selection of zero-voltage vectors can cause unnecessary switching, thereby increasing the losses or creating nonoptimal discontinuous intervals. Therefore, the appropriate selection of zero-voltage switching states is crucial for reducing the switching losses.
The offset voltage for clamping is calculated based on the voltage and current magnitudes. When the polarity of the calculated offset voltage is positive (+), V7(111) is used as the zero-voltage vector; whereas, when it is negative (−), V0(000) is used. Selecting the appropriate zero-voltage vectors according to the offset voltage polarity helps in maintaining the switching state of the already clamped phase, thereby preventing additional switching losses.
This selection of zero-voltage vectors affects both the switching losses and MVVV generation. Zero-voltage vectors are essential for generating MVVVs. Since different zero-voltage vectors are used based on the offset voltage polarity, the multi-virtual vectors are also distinguished based on the polarity.
The vectors generated via this process form the candidate voltage group. The optimal voltage vector that minimizes the difference from the calculated reference voltage is determined using a cost function. The desired load current is tracked by applying the switching state corresponding to the inverter.
In summary, the proposed D-MPC presents a balanced performance by reducing the current error and distortion while improving the overall power conversion efficiency.
The proposed method constructs a voltage-based cost function. The output phase voltage of the inverter at the next sampling point, calculated based on Equation (6) and the inverse dynamic model, is expressed as follows:
where
,
, and
denote the inverter output phase voltages at the next sampling point, and
,
, and
denote the inverter output phase currents at the next sampling point, respectively.
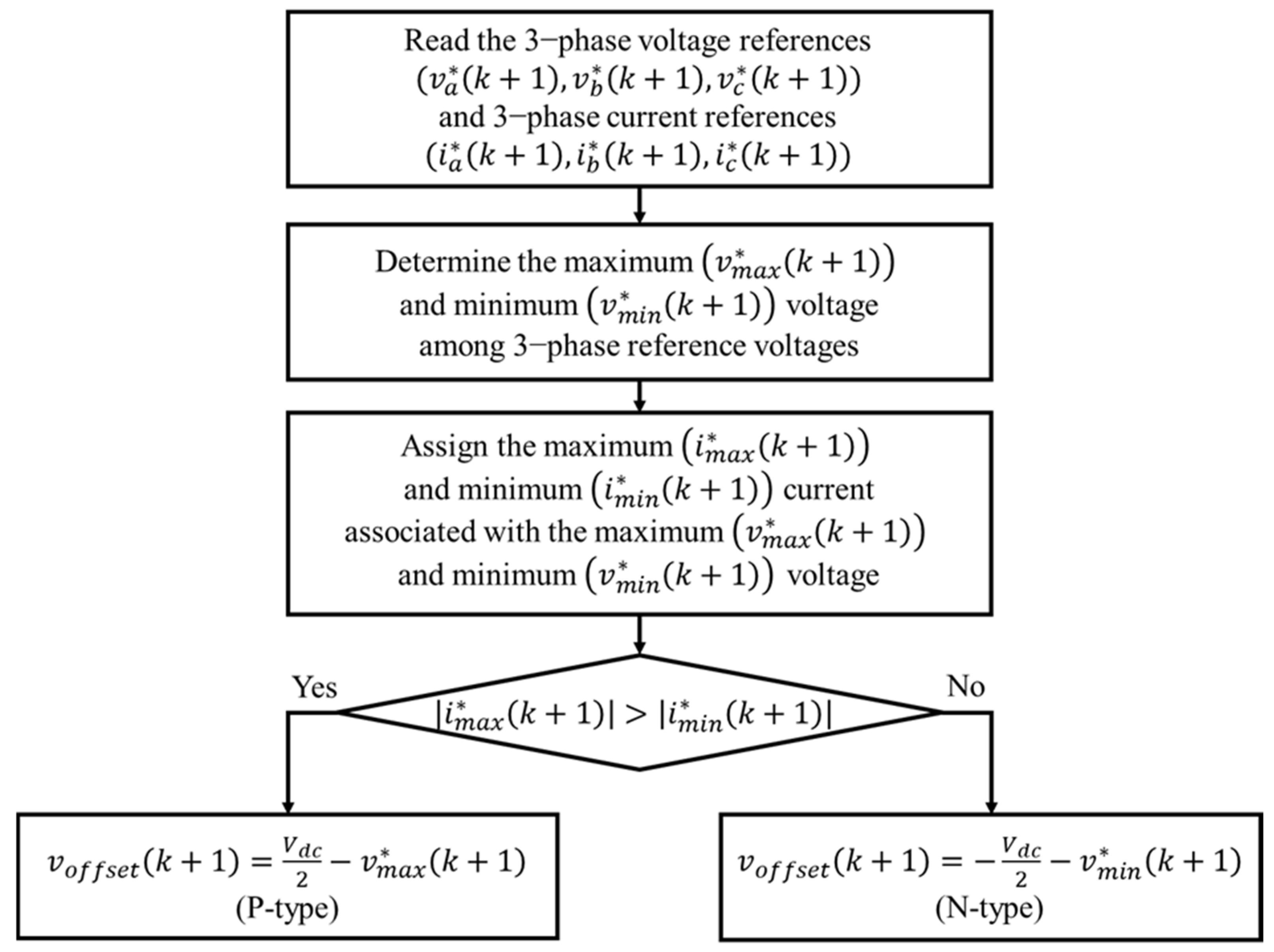
The discontinuous switching intervals are determined based on the voltage and current magnitudes. The maximum and minimum reference voltages calculated using Equation (8) are calculated as follows:
where
denotes the maximum voltage, and
denotes the minimum voltage, respectively.
Subsequently, the currents flowing in the phases where these two voltages occur are identified and designated as the maximum and minimum currents, respectively. In particular, the current in the phase where
occurs is assigned as
, whereas the current in the phase where
occurs is assigned as
. If the absolute value of
exceeds that of
, the offset voltage polarity becomes positive; otherwise, it becomes negative. The offset voltage is calculated as follows:
where
denotes the offset voltage.
When its polarity is positive (+), it is defined as a P-type offset voltage, and when it is negative (−), it is defined as an N-type offset voltage. The calculated offset voltage is added to the future reference voltage to clamp the phase with a high current to either a positive or negative DC link.
Figure 5 depicts the calculation process of the offset voltage.
In the proposed method,
V7(111) is selected when the offset voltage is P-type, and
V0(000) is selected when it is N-type.
Figure 6 depicts the selection of the zero-voltage vectors based on the offset voltage polarity.
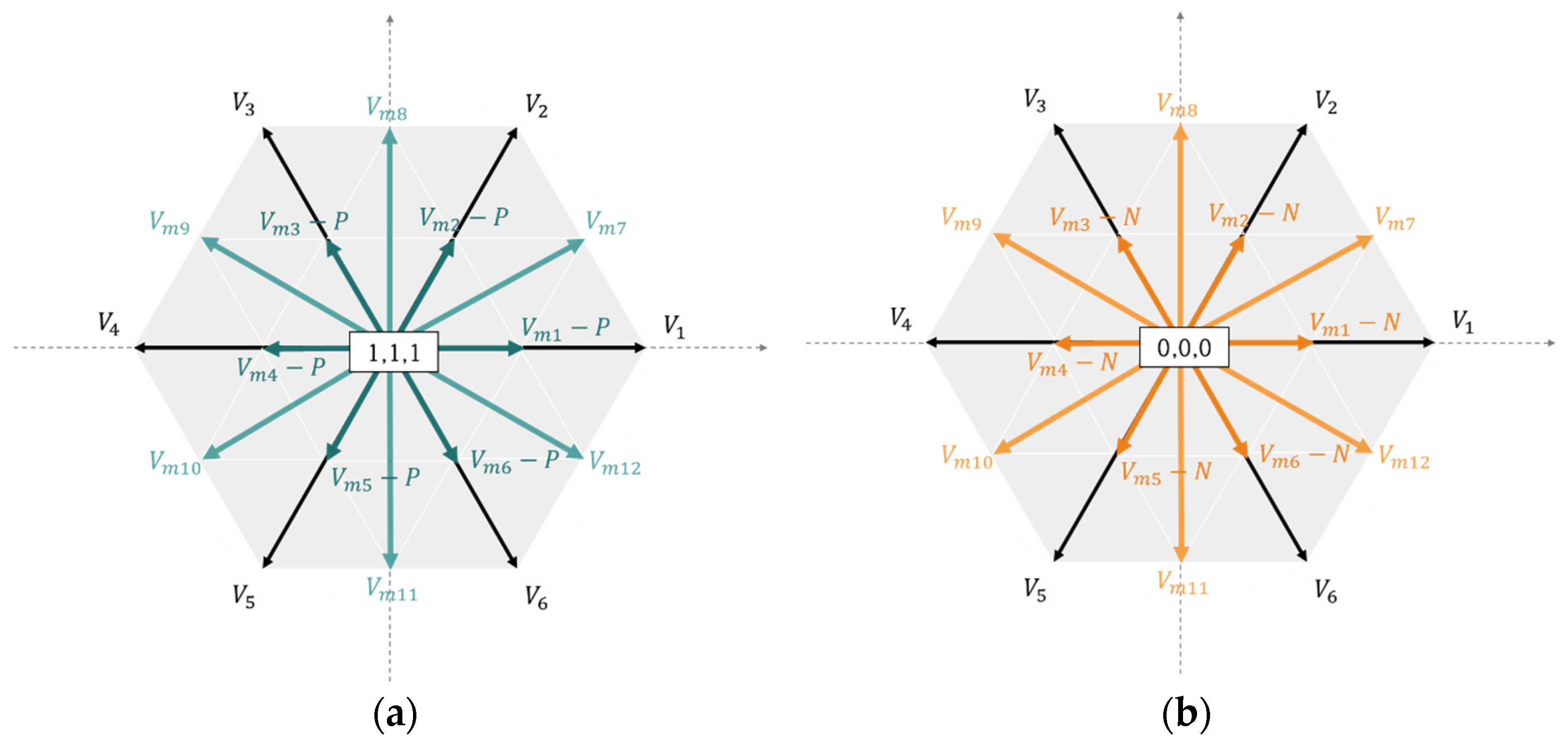
This selection of the zero-voltage vectors affects the switching losses and alters the switching states of the considered MVVVs. For the MVVV,
~
, the zero-voltage vectors, are essential for generation. Therefore, they are classified as P-type and N-type multi-vectors based on the offset voltage polarity. Since
~
is generated by synthesizing only the active vectors, it is a neutral vector that is unaffected by polarity.
Table 1 lists the switching states of the inverters used in the proposed method.
Figure 7 depicts a vector diagram of the multi-virtual voltage vectors based on the offset polarity.
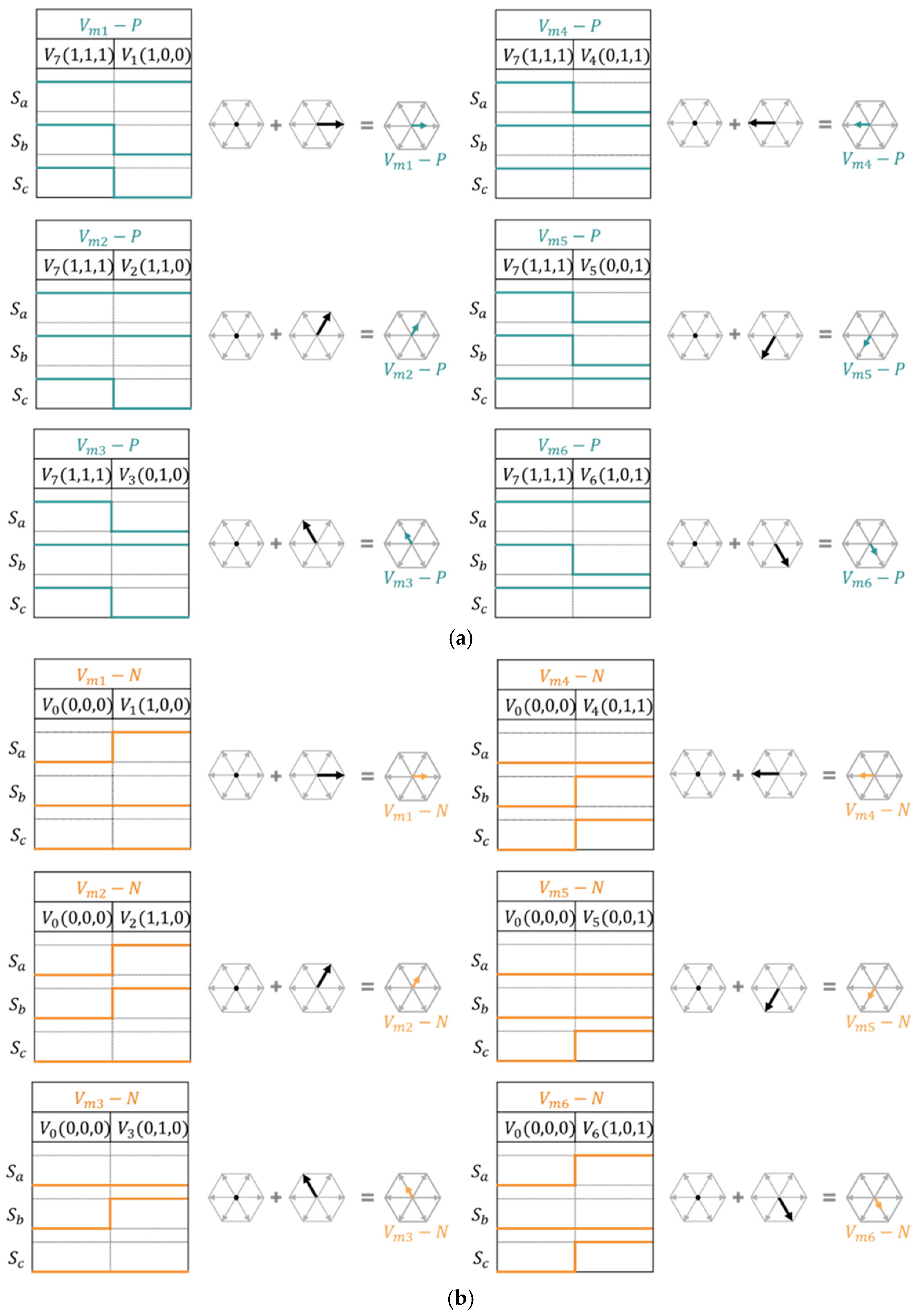
Figure 8 depicts the detailed switching states and generation process of P-type and N-type multi-vectors based on the selected zero-voltage vector.
The reference voltage for discontinuous switching can be calculated by adding the offset voltage to the voltage vector determined using Equation (8) as follows:
The optimal switching state is determined by comparing the reference voltage vector with the candidate vectors listed in
Table 1 using a cost function. The cost function is expressed as follows:
4. Simulations and Experimental Results
The performance of the proposed method is analyzed via simulations using an input DC voltage (V
dc = 200 V) and RL load (R = 1.2 Ω, L = 9.87 mH). The reference current is set to 15 A based on a modulation index of 0.6, and
Table 2 summarizes the parameters used in the simulation.
The performance of the proposed method is validated via comparative analyses with an existing MPC. The MPCs used in these analyses are given below.
The first is the conventional MPC. This approach utilizes six active voltage vectors and two zero-voltage vectors for current control in two-level inverters. However, its performance is limited by the number of available voltage vectors.
The second is the multi-vector MPC. This approach enhances the conventional MPC by introducing a multi-vector concept. While it achieves an output performance similar to that of multi-level inverters with improved current quality, it suffers from increased switching frequency and consequential switching losses owing to the higher number of voltage vectors under consideration.
To overcome these limitations, we propose the multi-vector-based D-MPC in this study. The proposed method integrates the multi-vector approach with discontinuous control techniques to preserve the output performance while suppressing switching during specific current intervals. This approach reduces the switching losses and improves the inverter efficiency.
This study verifies that the proposed D-MPC maintains the output performance while reducing the losses when compared with the conventional MPC and multi-vector MPC. We conducted simulations and experiments under both steady-state and transient conditions.
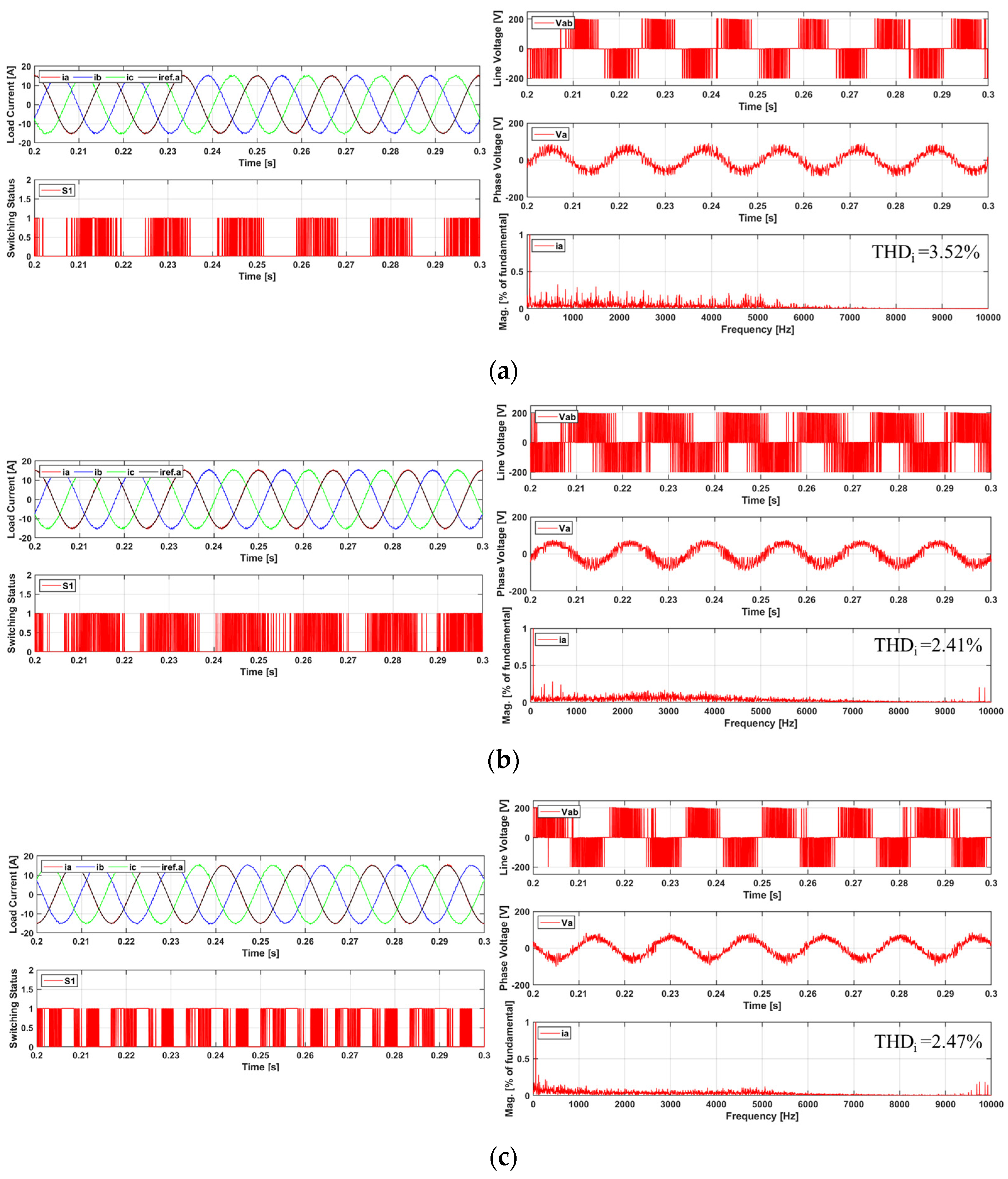
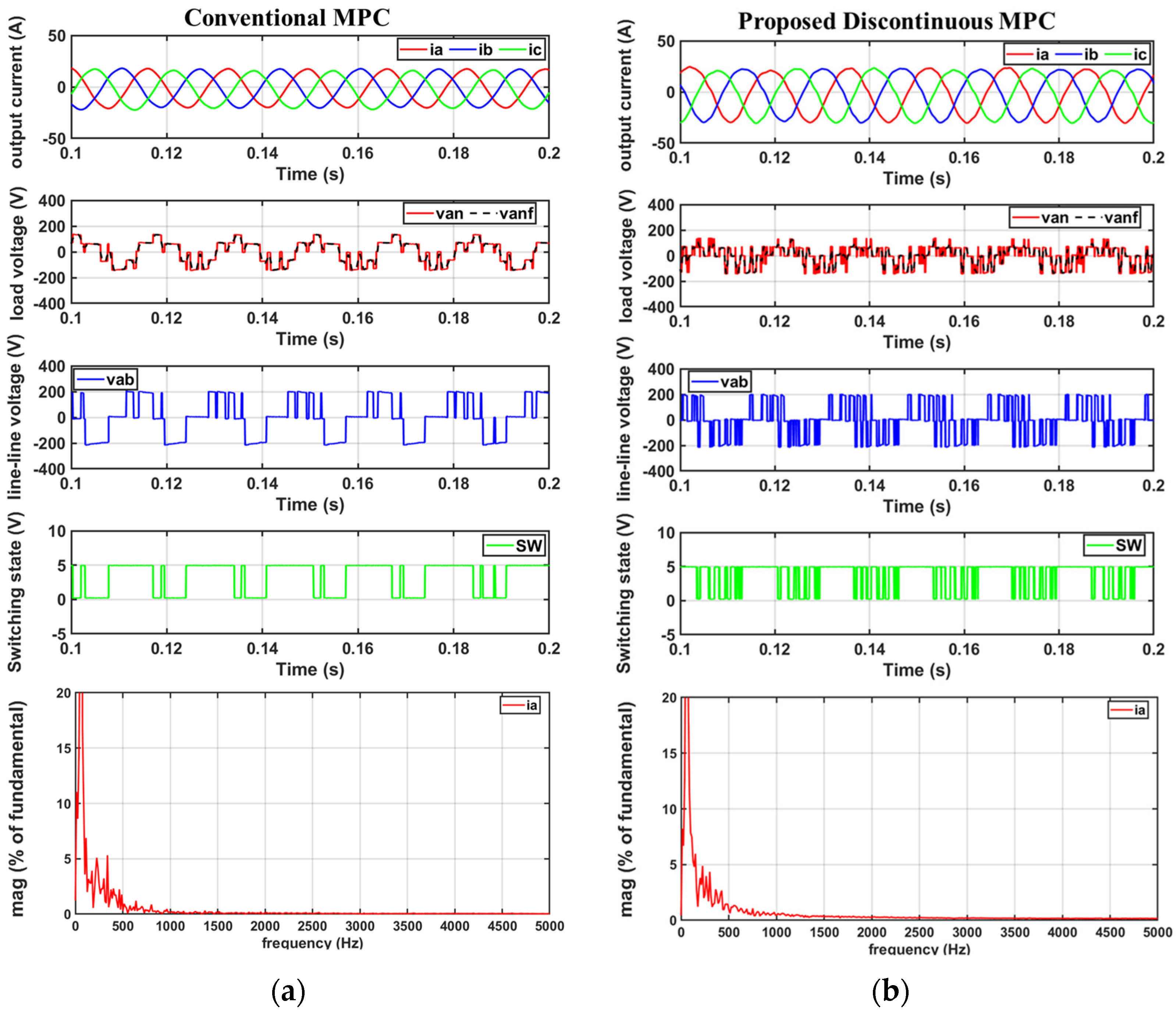
We performed a comparative performance analysis for the conventional MPC and multi-vector MPC, and we proposed D-MPC under normal operating conditions (
Figure 9). The comparison metrics include three-phase output currents, phase A reference current, switching waveforms for the phase A leg, line-to-line voltages, load phase voltages, and THD.
The results indicate that the conventional MPC exhibited relatively lower quality in three-phase output currents, with phase voltages presenting significant deviations from the ideal sinusoidal waveforms. This indicates the limitations of the basic implementation of the predictive control strategy.
The multi-vector MPC exhibited improved three-phase output current quality when compared with the conventional MPC by utilizing multiple vectors. The phase voltages also exhibited a closer approximation to the sinusoidal waveforms. However, this approach faces a significant drawback in that an increased switching frequency presents higher switching losses, which reduces the overall electric propulsion ship system efficiency.
The proposed D-MPC method exhibited additional improvements. The fast Fourier transform (FFT) analysis of the phase A output current demonstrated that the proposed method presented lower THD when compared with the conventional MPC, while maintaining THD performance equivalent to that of the multi-vector MPC.
Although direct confirmation of the switching losses from the graphs is challenging, the analysis of the switching patterns demonstrated suppressed switching activity during periods of high currents. This indicates a potential reduction in the switching losses, which was subsequently verified via additional data analysis, as shown in
Figure 10.
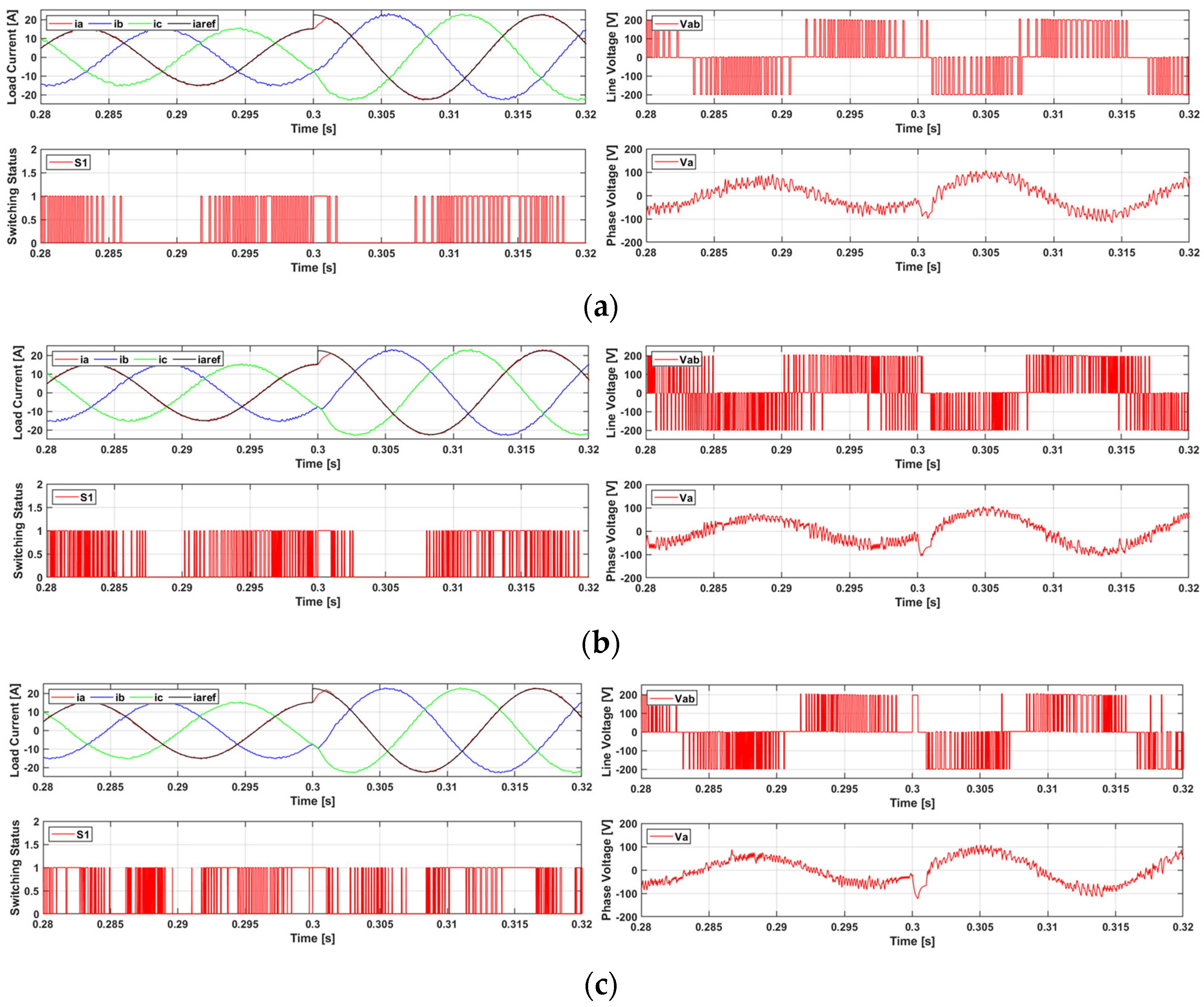
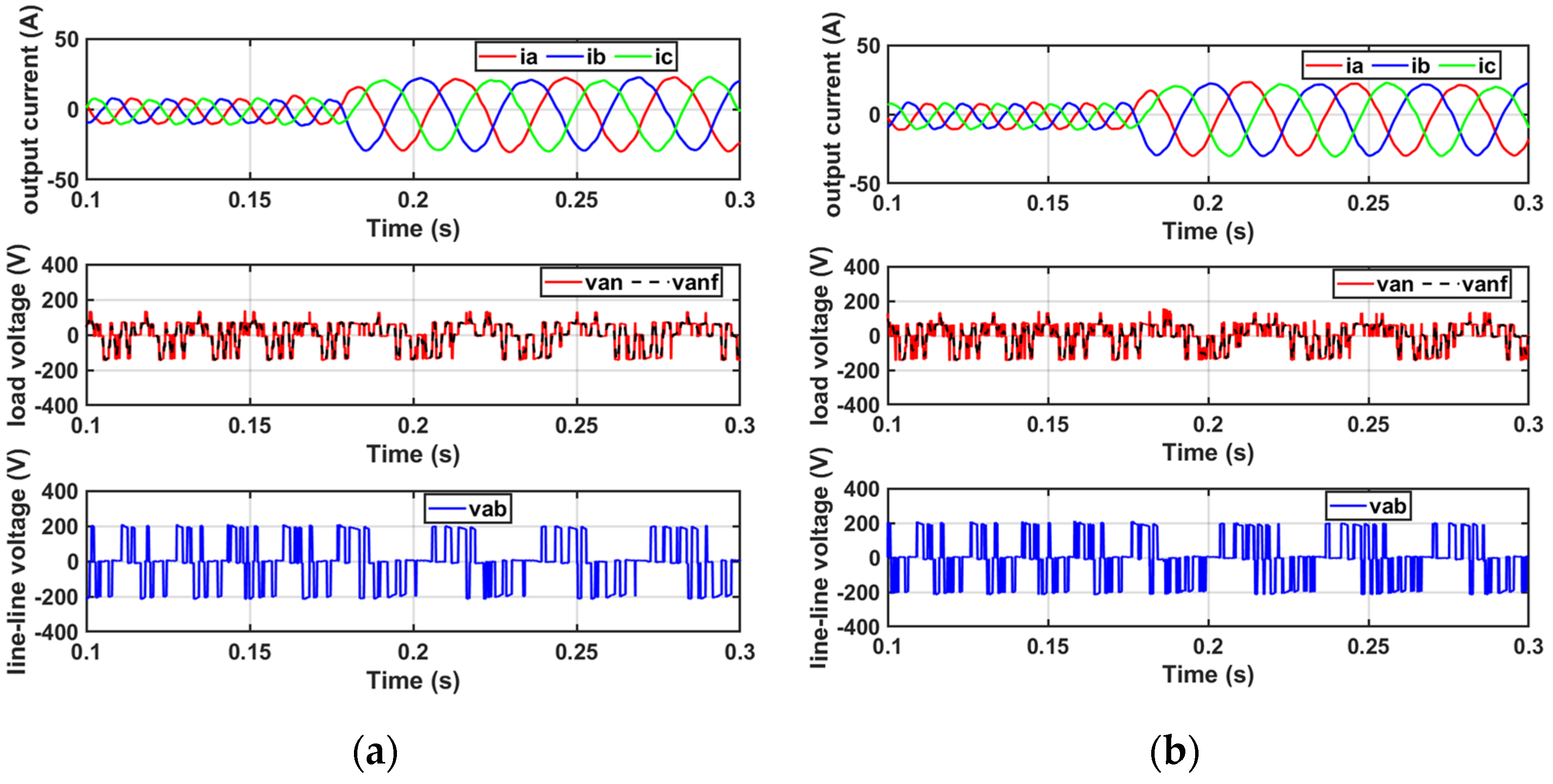
The output performance of the conventional MPC, multi-vector MPC, and the proposed D-MPC was compared during the transient states by varying the output current, as shown in
Figure 11. The comparison criteria are identical to those used in the steady-state analysis.
The conventional MPC exhibited rapid response characteristics; however, it demonstrated a relatively lower output current quality.
The multi-vector MPC demonstrated improved output performance when compared with the conventional MPC using multiple vectors, but it presented increased losses due to higher switching frequency.
The proposed D-MPC achieved rapid response characteristics similar to the conventional MPC while applying multiple vectors and demonstrated that discontinuous intervals are preserved even under low-load conditions. This indicates that a discontinuous control technique can be applied via switching patterns in low-load regions to suppress unnecessary switching operations, thereby potentially reducing the switching losses. Additionally, the output current performance exhibited results similar to those of the multi-vector MPC.
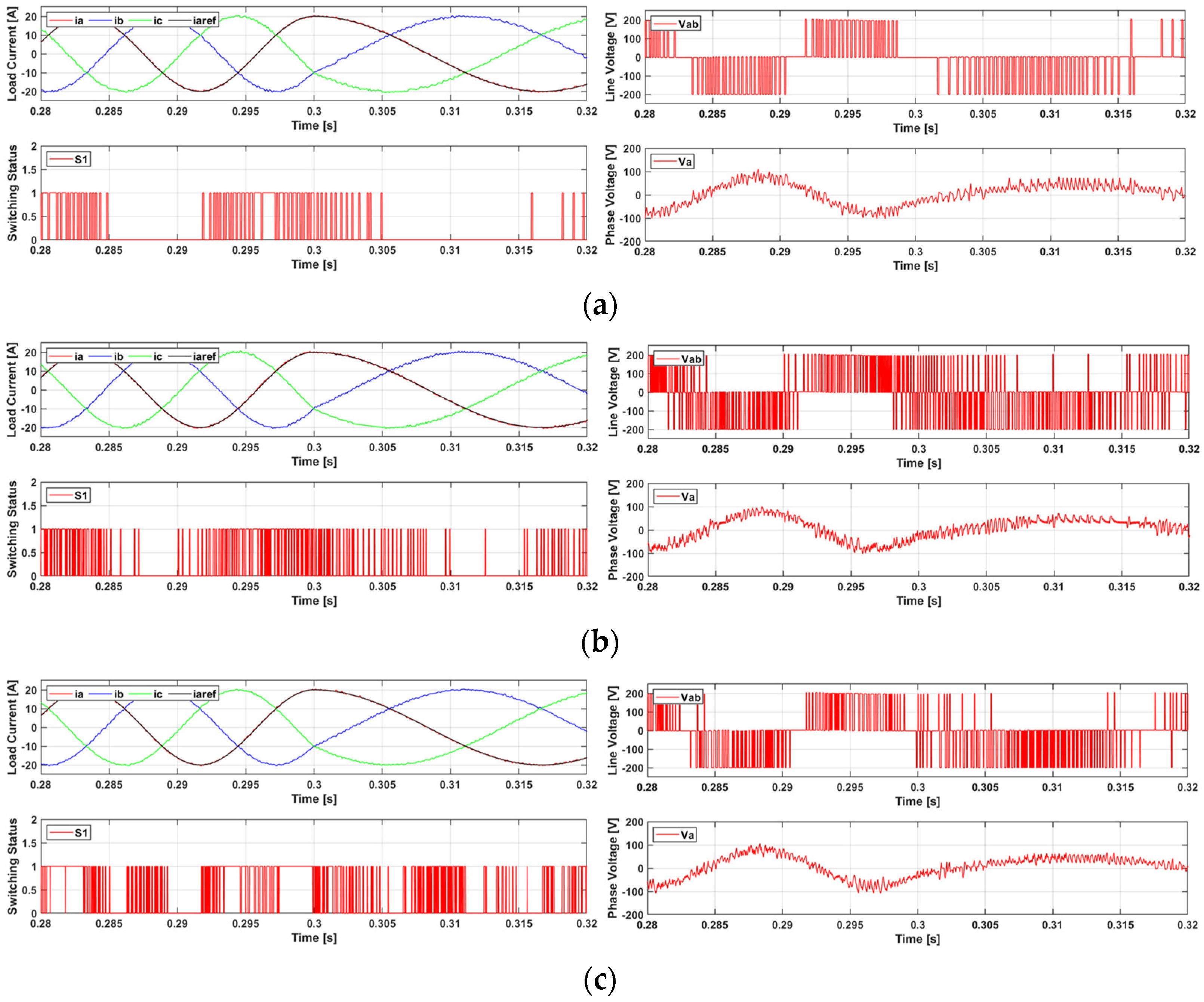
The performances of the conventional MPC, multi-vector MPC, and the proposed D-MPC were compared during the transient states by varying the output frequency, as shown in
Figure 12. The comparison criteria were identical to those used in the steady-state analysis.
The conventional MPC exhibited rapid response characteristics; however, it exhibited a tendency towards degraded output current quality under low-frequency conditions.
The multi-vector MPC improved the output performance when compared with the conventional MPC by utilizing multiple vectors; however, this presents the disadvantage of increased switching losses.
The proposed D-MPC exhibited rapid response characteristics similar to those of the conventional MPC while applying multiple vectors and demonstrated superior output current performance even under low-frequency conditions. Furthermore, the discontinuous switching intervals were consistently maintained in the high-current regions, regardless of the frequency variations. This demonstrates that the discontinuous control technique presents consistent switching suppression effects independent of the frequency changes, thereby preventing unnecessary switching operations and reducing the switching losses.
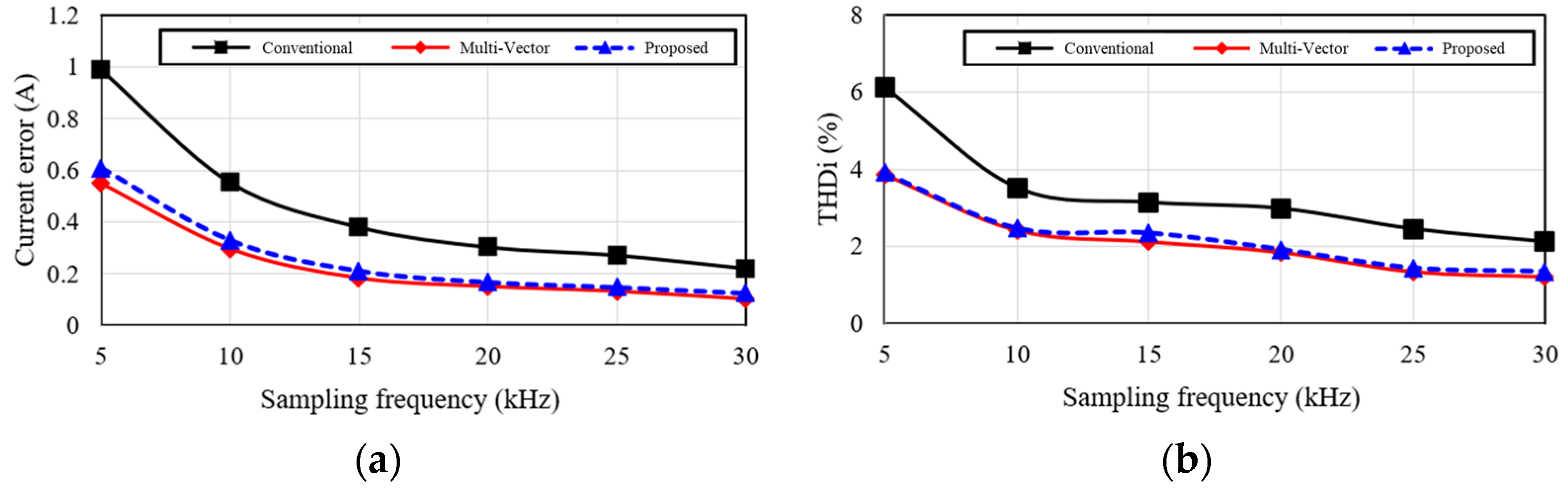
We performed a comparative analysis for the conventional MPC, multi-vector MPC, and the proposed D-MPC across various sampling frequency conditions, as shown in
Figure 10.
Figure 10a presents a comparison of the current error performances of each method. The current error is calculated as follows:
where
denotes the reference currents for each phase, and
denotes the measured load currents. With N set to 10,000, the error represents the average of these values.
The proposed D-MPC method presents a lower current error when compared with the conventional MPC across all the sampling frequency ranges, despite implementing multiple vectors. When compared with the multi-vector MPC, the proposed method achieves a nearly identical output performance while effectively reducing the current error by employing its discontinuous switching technique. In particular, the proposed method presents considerable potential for improving the system efficiency owing to reduced switching losses, achieved via switching suppression in the discontinuous regions.
Additionally,
Figure 10b depicts the comparison of the output current THD for each method. The THD output current is calculated as follows:
where
denote the fundamental and nth harmonic components of the output currents in phase
, respectively. The simulation considers up to the 8335th harmonic components.
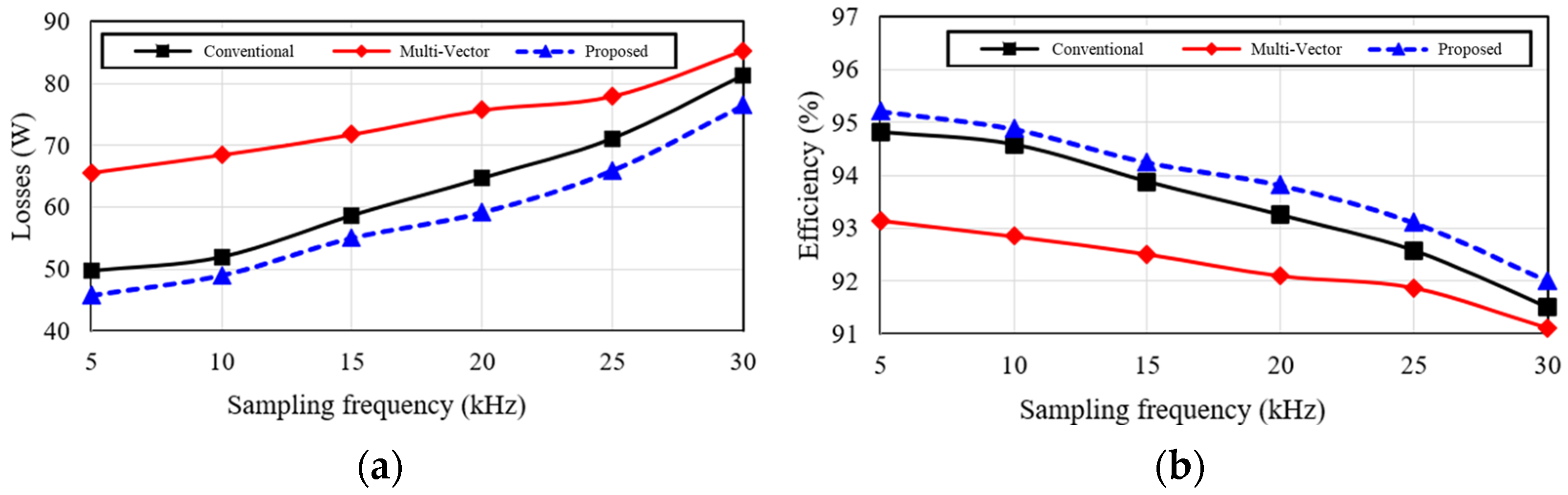
We performed comparative analyses of the total losses and for the conventional MPC, multi-vector MPC, and the proposed D-MPC across various switching frequency conditions, as shown in
Figure 13. The proposed D-MPC presented lower losses and higher efficiency than the conventional MPC at identical switching frequencies. This improvement is attributed to the fact that the conventional MPC increases the number of switching operations during the periods of increasing current, whereas the proposed D-MPC employs discontinuous switching techniques that suppress the switching operations during unnecessary intervals. Furthermore, when compared with the multi-vector MPC, the proposed method maintained the output performance while further reducing the switching losses, achieving greater efficiency improvement.
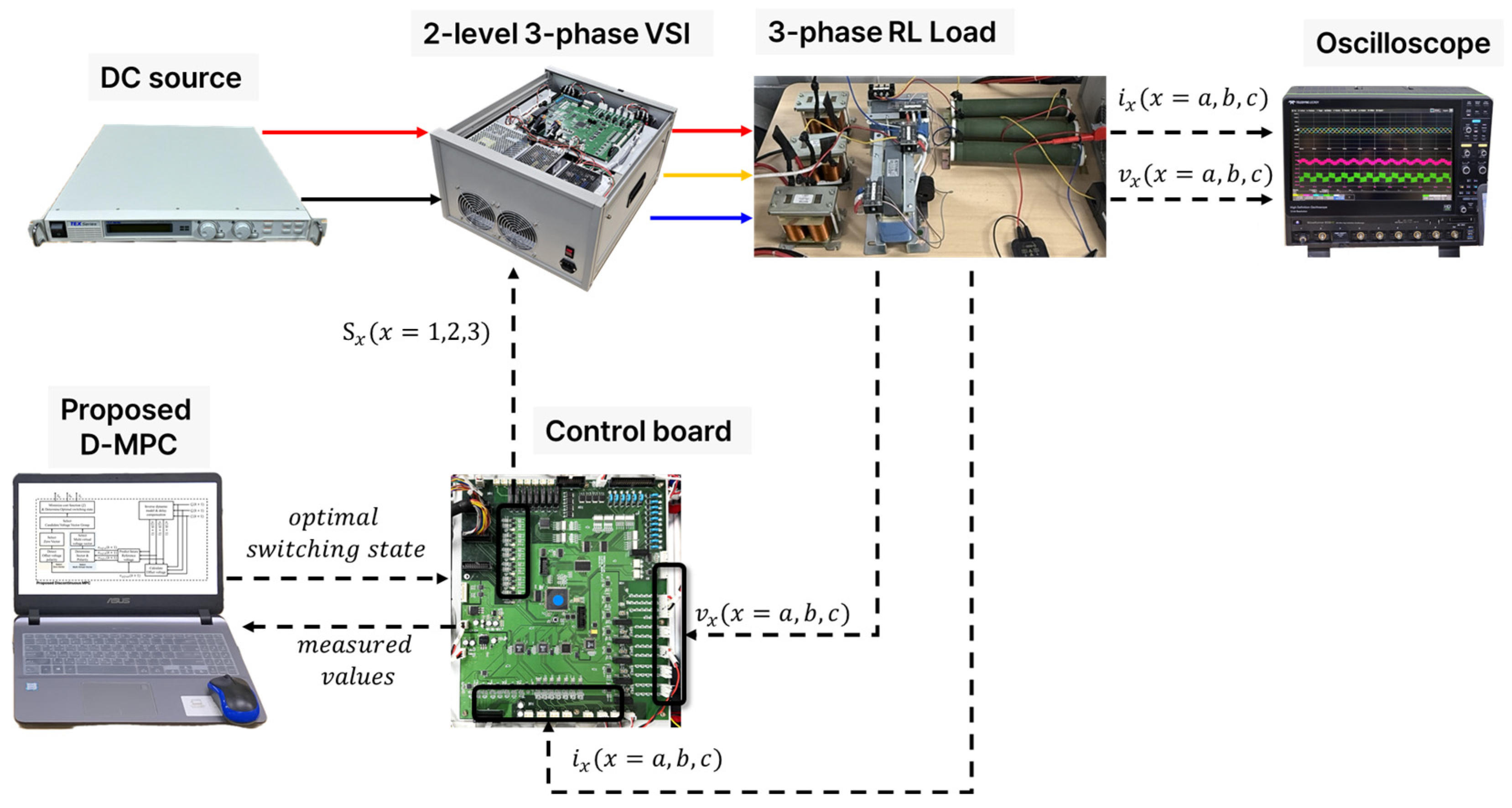
The proposed method was implemented using a prototype experimental setup, as shown in
Figure 14. The experimental apparatus comprised a three-phase voltage source inverter (VSI) with IGBT modules and an RL load. A digital signal processor (DSP, TMS320F28335) was used for the real-time processing of the switching algorithm.
In this experiment, we validated the performance of the proposed method via comparison with conventional MPCs. We conducted experiments to demonstrate that the proposed method can maintain the output current performance while reducing the switching losses and improving inverter efficiency via discontinuous switching techniques. In addition, the performance was evaluated under various switching frequencies and load conditions to examine the feasibility of its practical implementation in real-world environments.
The experimental results (
Figure 15 and
Figure 16) demonstrate the superior performance of the proposed discontinuous MPC compared with the conventional MPC. Notably, the results exhibit the same trends as those observed in the simulation, confirming consistent improvements under both steady-state (
Figure 15) and transient-state (
Figure 16) conditions.
The output performance of the proposed MPC was maintained at nearly identical levels to that of the multi-vector MPC. However, by implementing discontinuous-based switching techniques, experimental validation confirmed that switching losses can be potentially reduced, thereby increasing the inverter efficiency.
Table 3 presents a comparison of the DSP execution times and reduction rates for the conventional MPC, multi-vector MPC, and the proposed D-MPC. The proposed method achieved an execution time of 20.12 μs, which demonstrates an improvement of approximately 20% when compared with the conventional MPC (25.23 μs). This efficiency is quantified by a DSP execution time reduction rate of 0.79, exhibiting enhanced computational efficiency over the existing method. Furthermore, the execution time of the proposed method is similar to that of the multi-vector MPC (19.34 μs).
Despite implementing multiple vectors, the introduction of the pre-vector selection technique enabled the proposed method to maintain an efficient execution time comparable to that of the existing methods. These experimental results demonstrate that the combination of discontinuous switching and pre-vector selection can minimize the computational overhead while maintaining the control performance. The proposed D-MPC balances the processing efficiency with the control accuracy.
Table 4 presents a comparison of the losses and efficiency of the conventional MPC, multi-vector MPC, and proposed D-MPC under a 5 kW load condition.
The experimental results demonstrate that the proposed MPC achieved lower losses at 260 W, demonstrating an improvement of approximately 15% when compared with the conventional MPC (307.5 W). When compared with the multi-vector MPC (344 W), the proposed method reduced the losses by 24%, indicating a significant improvement in the performance.
In terms of efficiency, the proposed MPC exhibited superior results at 95%, outperforming both the conventional MPC (94%) and multi-vector MPC (93%).
These experimental findings demonstrate that discontinuous switching effectively reduces the switching losses by suppressing the switching operations during high-current periods. Furthermore, the results indicate that selecting the optimal zero-voltage vectors based on the offset voltage polarity prevents unnecessary switching, making it an effective methodology for improving both the loss reduction and electric propulsion system efficiency.
5. Conclusions
In this study, we propose a D-MPC approach to enhance the performance of the inverters used in electric propulsion ships. The proposed method maintains the power quality improvements of the multi-vector MPC while minimizing the switching losses via discontinuous modulation and optimized zero-voltage vector selection. The simulation and experimental results demonstrate the superior performance of the D-MPC method when compared with the conventional MPC and multi-vector MPC approaches.
The proposed method employs discontinuous switching in high-current regions to reduce the switching losses, and it selects the optimal zero-voltage vector based on the offset voltage polarity to suppress unnecessary switching operations. Using this approach, the proposed method achieves an improved THD performance of up to 30%. The current error is also reduced by 30–45% based on the sampling frequency, with significant improvements observed under lower sampling frequency conditions (5–10 kHz).
While maintaining a current quality similar to that of the multi-vector MPC, the proposed method achieves substantial loss reductions of approximately 15% when compared with the conventional MPC and 24% when compared with that of the multi-vector MPC. A consistent pattern of lower switching losses and higher inverter efficiency was observed under various switching frequency conditions.
Furthermore, the D-MPC approach reduces the computational overhead by limiting the number of switching state options via discontinuous interval settings. The DSP execution time of the proposed method decreases by approximately 20% when compared with that of conventional MPC, while maintaining a performance level similar to that of the multi-vector MPC, thereby ensuring the ease of real-time implementation. This ensures the feasibility of real-time implementation.
The findings of this study present considerable technical advantages for power conversion devices operating in environments with limited cooling systems, such as small- to medium-sized vessels. By simultaneously enhancing the inverter efficiency, control performance, and implementation simplicity, the proposed D-MPC contributes to the advancement of inverter control technology for electric propulsion ships. Furthermore, it presents considerable potential for applications in various industrial fields where power conversion is critical.
Future plans include long-term performance verification through maritime demonstration on actual small- and medium-sized electric propulsion vessels and the optimization of overall electric propulsion system efficiency through integration with energy storage systems.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}