
Multi-Unit Coupled Motion Hybrid Generator Based on a Simple Pendulum Structure


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Materials and Methods
2.1. Fabrication of MCM-HG
2.2. Electrical Measurements of MCM-HG
3. Results and Discussion
3.1. Structure and Working Principle of MCM-HG
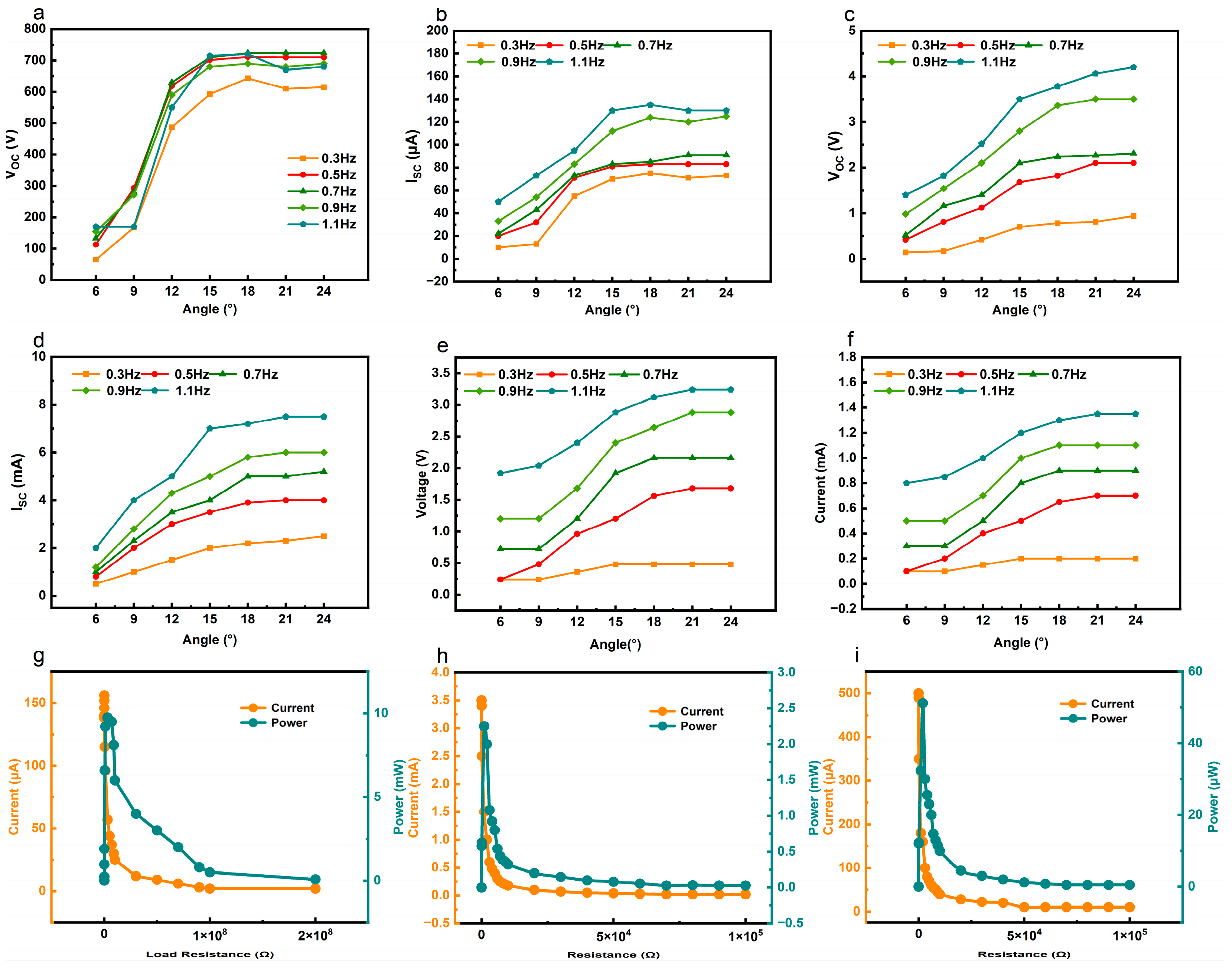
3.2. Structural Design and Optimization of MCM-HG
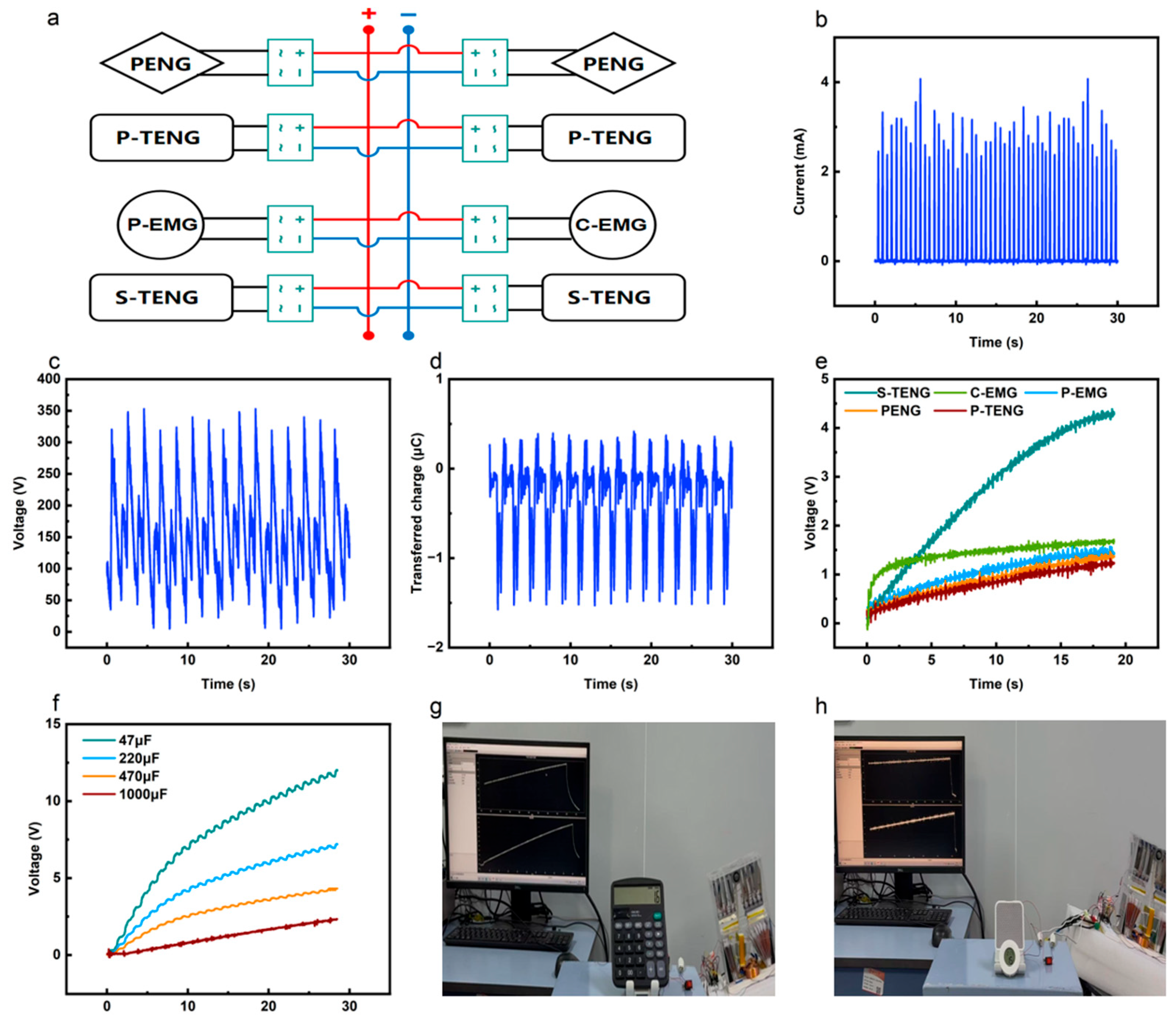
3.3. Output Performance of MCM-HG
3.4. Demonstration of MCM-HG Applications
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Stojanovic, M.; Preisig, J. Overview of networking protocols for underwater wireless communications. IEEE Commun. Mag. 2009, 47, 97–102. [Google Scholar] [CrossRef]
- Razzaq, A.; Ahmad, A.; Malik, A.W.; Fahmideh, M.; Ramadan, R.A. Software engineering for internet of underwater things to analyze oceanic data. Internet Things 2023, 24, 100893. [Google Scholar] [CrossRef]
- Baños, R.; Manzano-Agugliaro, F.; Montoya, F.G.; Gil, C.; Alcayde, A.; Gómez, J. Optimization methods applied to renewable and sustainable energy: A review. Renew. Sustain. Energy Rev. 2010, 14, 899. [Google Scholar] [CrossRef]
- Bar David, Y.; Geller, T.; Bistritz, I.; Ben-Gal, I.; Bambos, N.; Khmelnitsky, E. Wireless Body Area Network Control Policies for Energy-Efficient Health Monitoring. Sensors 2021, 21, 4245. [Google Scholar] [CrossRef]
- Hribernik, M.; Kos, A. Exploring the applicability of haptic actuators in aquatic environments. Internet Things 2023, 24, 100924. [Google Scholar] [CrossRef]
- Dong, L.; Li, J.; Zhang, H.; Gao, M.; Yang, Y.; Yang, F. Adaptive energy harvesting approach for smart wearables towards human-induced stochastic oscillations. J. Clean. Prod. 2023, 418, 138094. [Google Scholar] [CrossRef]
- Liu, Y.H.; Tse, C.K.; Yang, G.; Liao, Y.; Lin, H.; Dai, D.; Lin, H.; Hong, H.; Wu, H.; Zhang, X. Achieving Ultrahigh Efficiency of Triboelectric Nanogenerator Energy Harvesting Systems via Hybrid Electronic-Spark Power Management. Adv. Funct. Mater. 2024, 34, 2405338. [Google Scholar] [CrossRef]
- Xiao, Z.; Tan, P.; Xue, J.; Xi, Y.; Liu, M.; Zou, Y.; Zheng, Q.; Li, Z.; Wu, Y. Adaptive respiratory muscle trainer based on hybrid nanogenerator sensor and artificial intelligence. InfoMat 2025, 7, e70004. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Networks 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Heidemann, J.; Stojanovic, M.; Zorzi, M. Underwater sensor networks: Applications, advances, and challenges. Philos. Trans. R. Soc. A 2012, 370, 158–175. [Google Scholar] [CrossRef]
- Jung, S.; Lee, J.; Hyeon, T.; Lee, M.; Kim, D.H. Fabric-based integrated energy devices for wearable activity monitors. Adv. Mater. 2014, 26, 6329–6334. [Google Scholar] [CrossRef] [PubMed]
- Zhao, L.-C.; Zou, H.-X.; Xie, X.; Guo, D.-H.; Gao, Q.-H.; Wu, Z.-Y.; Yan, G.; Wei, K.-X.; Zhang, W.-M. Mechanical intelligent wave energy harvesting and self-powered marine environment monitoring. Nano Energy 2023, 108, 108230. [Google Scholar] [CrossRef]
- Wang, W.; Yang, D.; Yan, X.; Wang, L.; Hu, H.; Wang, K. Triboelectric nanogenerators: The beginning of blue dream. Front. Chem. Sci. Eng. 2023, 17, 635–678. [Google Scholar] [CrossRef]
- Fan, F.-R.; Tian, Z.-Q.; Wang, Z.L. Flexible Triboelectric Generator. Nano Energy 2012, 1, 328–334. [Google Scholar] [CrossRef]
- Wang, Z.L. Triboelectric nanogenerators as new energy technology and self-powered sensors-Principles, problems and perspectives. Faraday Discuss. 2014, 176, 447–458. [Google Scholar] [CrossRef]
- Fan, F.R.; Tang, W.; Wang, Z.L. Flexible Nanogenerators for Energy Harvesting and Self-Powered Electronics. Adv. Mater. 2016, 28, 4283–4305. [Google Scholar] [CrossRef]
- Liang, X.; Jiang, T.; Liu, G.; Xiao, T.; Xu, L.; Li, W.; Xi, F.; Zhang, C.; Wang, Z.L. Triboelectric Nanogenerator Networks Integrated with Power Management Module for Water Wave Energy Harvesting. Adv. Funct. Mater. 2019, 29, 1807241. [Google Scholar] [CrossRef]
- Khan, U.; Kim, S.-W. Triboelectric Nanogenerators for Blue Energy Harvesting. ACS Nano 2016, 10, 6429–6432. [Google Scholar] [CrossRef]
- Viet, N.V.; Wu, N.; Wang, Q. A Review on Energy Harvesting from Ocean Waves by Piezoelectric Technology. J. Model. Mech. Mater. 2017, 1, 20160161. [Google Scholar] [CrossRef]
- Rodrigues, C.; Nunes, D.; Clemente, D.; Mathias, N.; Correia, J.M.; Rosa-Santos, P.; Taveira-Pinto, F.; Morais, T.; Pereira, A.; Ventura, J. Emerging Triboelectric Nanogenerators for Ocean Wave Energy Harvesting: State of the Art and Future Perspectives. Energy Environ. Sci. 2020, 13, 2657–2683. [Google Scholar] [CrossRef]
- Wu, H.; Wang, Z.; Zi, Y. Multi-mode Water-tube-based Triboelectric Nanogenerator Designed for Low-frequency Energy Harvesting with Ultrahigh Volumetric Charge Density. Adv. Energy Mater. 2021, 11, 2100038. [Google Scholar] [CrossRef]
- Li, J.; Chen, J.; Guo, H. Triboelectric Nanogenerators for Harvesting Wind Energy: Recent Advances and Future Perspectives. Energies 2021, 14, 6949. [Google Scholar] [CrossRef]
- Xiang, H.; Zeng, Y.; Huang, X.; Wang, N.; Cao, X.; Wang, Z.L. From Triboelectric Nanogenerator to Multifunctional Triboelectric Sensors: A Chemical Perspective toward the Interface Optimization and Device Integration. Small 2022, 18, 2107222. [Google Scholar] [CrossRef] [PubMed]
- Yuan, Z.; Wei, X.; Jin, X.; Sun, Y.; Wu, Z.; Wang, Z.L. Magnetic energy harvesting of transmission lines by the swinging triboelectric nanogenerator. Mater. Today Energy 2021, 21, 100848. [Google Scholar] [CrossRef]
- Demircioglu, O.; Cicek, M.O.; Doganay, D.; Gazaloglu, G.; Baykal, C.; Cinar, S.; Unalan, H.E. Triboelectric Nanogenerators for Blue Energy Harvesting in Simulated Wave Conditions. Nano Energy 2022, 108, 108157. [Google Scholar] [CrossRef]
- Zhang, C.; Yuan, W.; Zhang, B.; Yang, J.; Hu, Y.; He, L.; Zhao, X.; Li, X.; Wang, Z.L.; Wang, J. A Rotating Triboelectric Nanogenerator Driven by Bidirectional Swing for Water Wave Energy Harvesting. Small 2023, 19, 2304412. [Google Scholar] [CrossRef]
- Ren, Z.W.; Liang, X.; Liu, D.; Li, X.J.; Ping, J.F.; Wang, Z.M.; Wang, Z.L. Water-Wave Driven Route Avoidance Warning System for Wireless Ocean Navigation. Adv. Energy Mater. 2021, 11, 2101116. [Google Scholar] [CrossRef]
- Xu, Z.; Chen, L.; Zhang, Z.; Han, J.; Chen, P.; Hong, Z.; Jiang, T.; Wang, Z.L. Durable Roller-Based Swing-Structured Triboelectric Nanogenerator for Water Wave Energy Harvesting. Small 2023, 19, 2307288. [Google Scholar] [CrossRef]
- Zhao, T.; Niu, B.; Xie, G.; Hu, C.; Liu, B.; Xu, M.; Ma, Y. A High Output Triboelectric–Electromagnetic Hybrid Generator for Water Wave Energy Harvesting. Adv. Mater. Technol. 2022, 7, 2101485. [Google Scholar] [CrossRef]
- Ding, J.; Jiang, J.; Lin, T.; Liu, G.; Yao, H.; Wen, H.; Li, S.; Mo, F.; Wan, L. Realization of a Sustainable Charging Power Source by In Situ Low-Frequency Water Wave Energy Harvesting with a Coaxial Triboelectric–Electromagnetic Hybrid Generator. Adv. Energy Sustain. Res. 2022, 3, 2200087. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Li, H.; Wan, L. Multi-Unit Coupled Motion Hybrid Generator Based on a Simple Pendulum Structure. Appl. Sci. 2025, 15, 5454. https://doi.org/10.3390/app15105454
Li Y, Li H, Wan L. Multi-Unit Coupled Motion Hybrid Generator Based on a Simple Pendulum Structure. Applied Sciences. 2025; 15(10):5454. https://doi.org/10.3390/app15105454
Chicago/Turabian StyleLi, Yifan, Huiying Li, and Lingyu Wan. 2025. "Multi-Unit Coupled Motion Hybrid Generator Based on a Simple Pendulum Structure" Applied Sciences 15, no. 10: 5454. https://doi.org/10.3390/app15105454
APA StyleLi, Y., Li, H., & Wan, L. (2025). Multi-Unit Coupled Motion Hybrid Generator Based on a Simple Pendulum Structure. Applied Sciences, 15(10), 5454. https://doi.org/10.3390/app15105454