
A Traffic Information Detection Method at Single Intersection Based on Wi-Fi Data


Abstract
1. Introduction
2. Theoretical and Technical Foundations
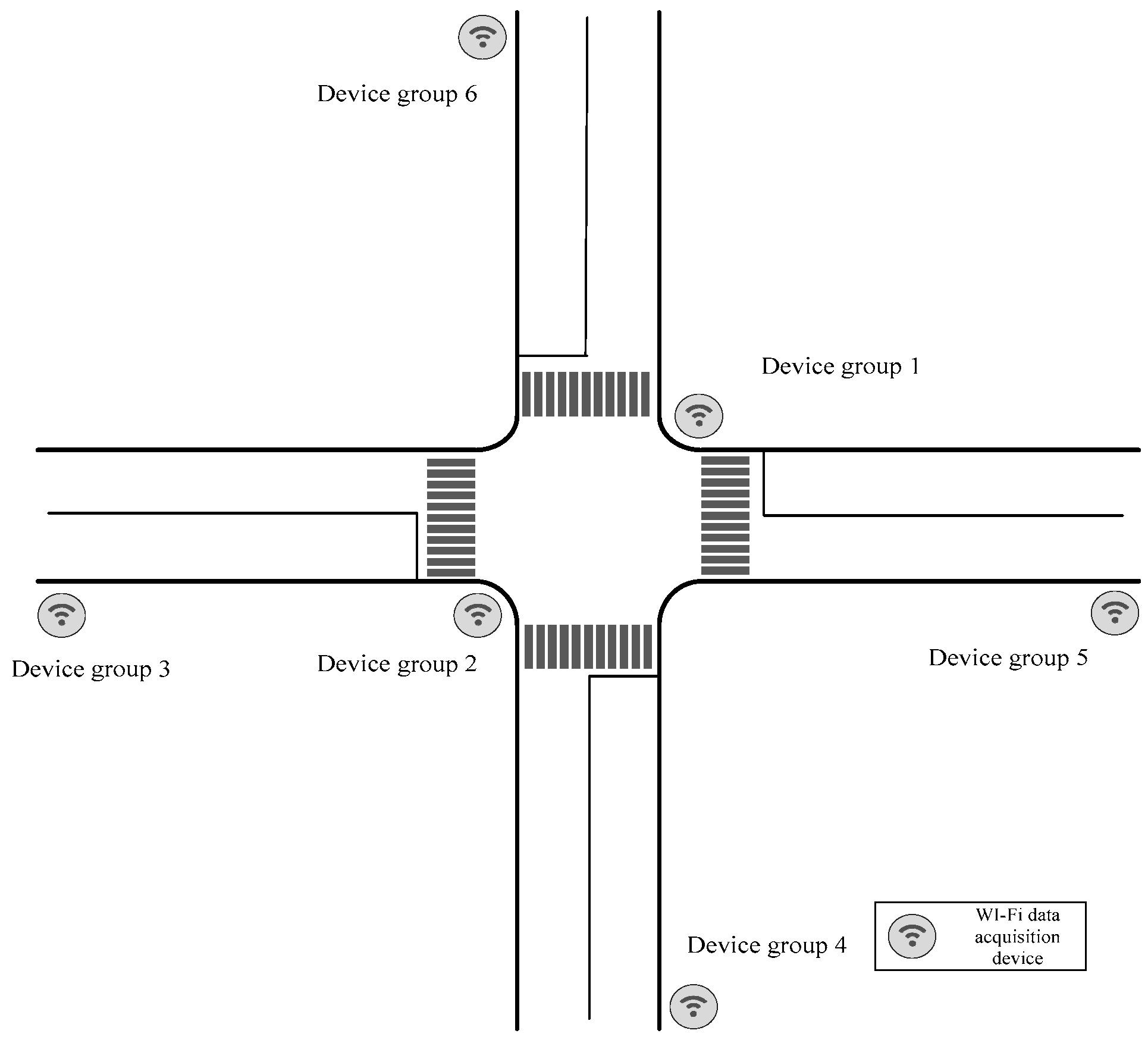
2.1. System Architecture of Wi-Fi Data Acquisition
2.2. Key Technology
2.2.1. MAC Address Matching
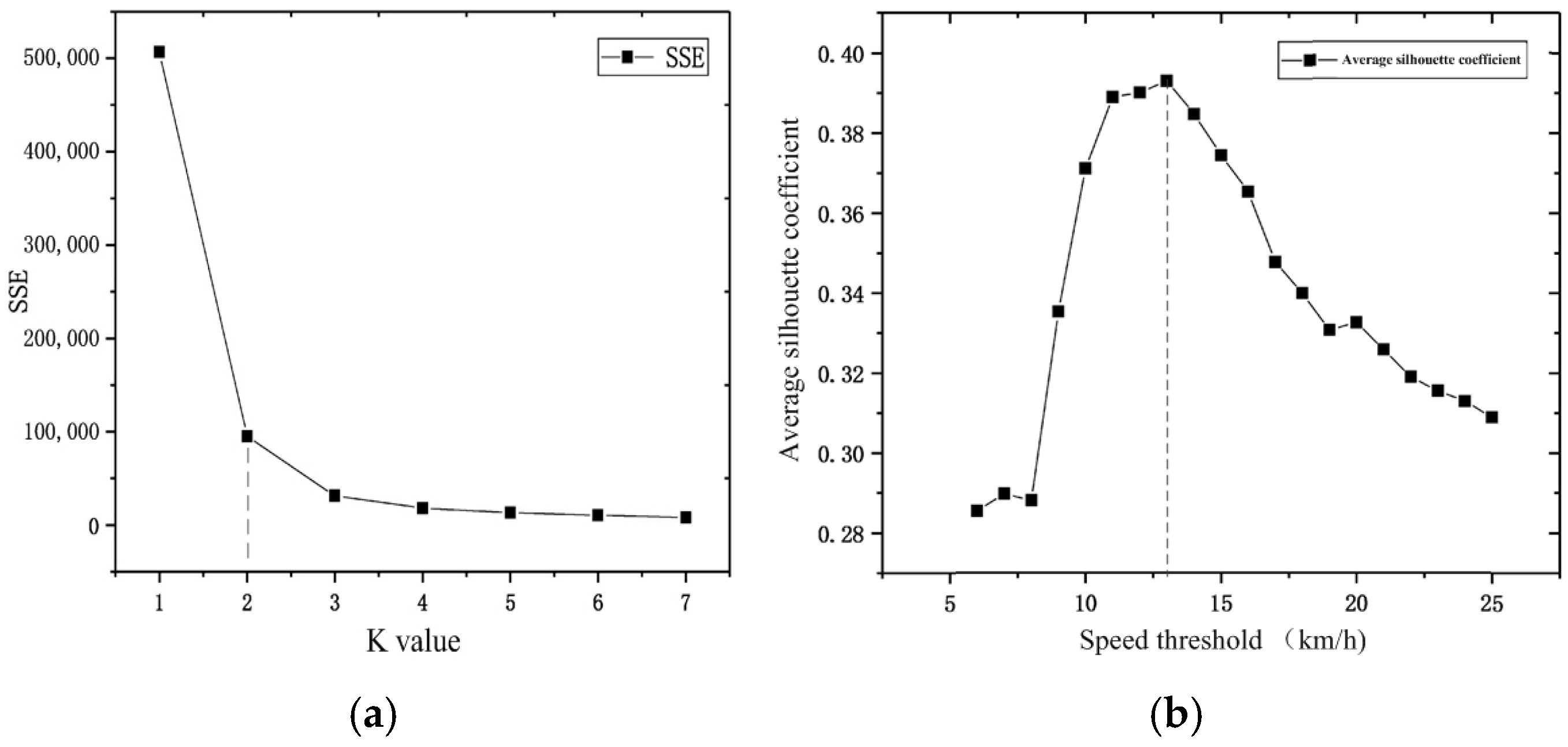
2.2.2. K-Means Clustering
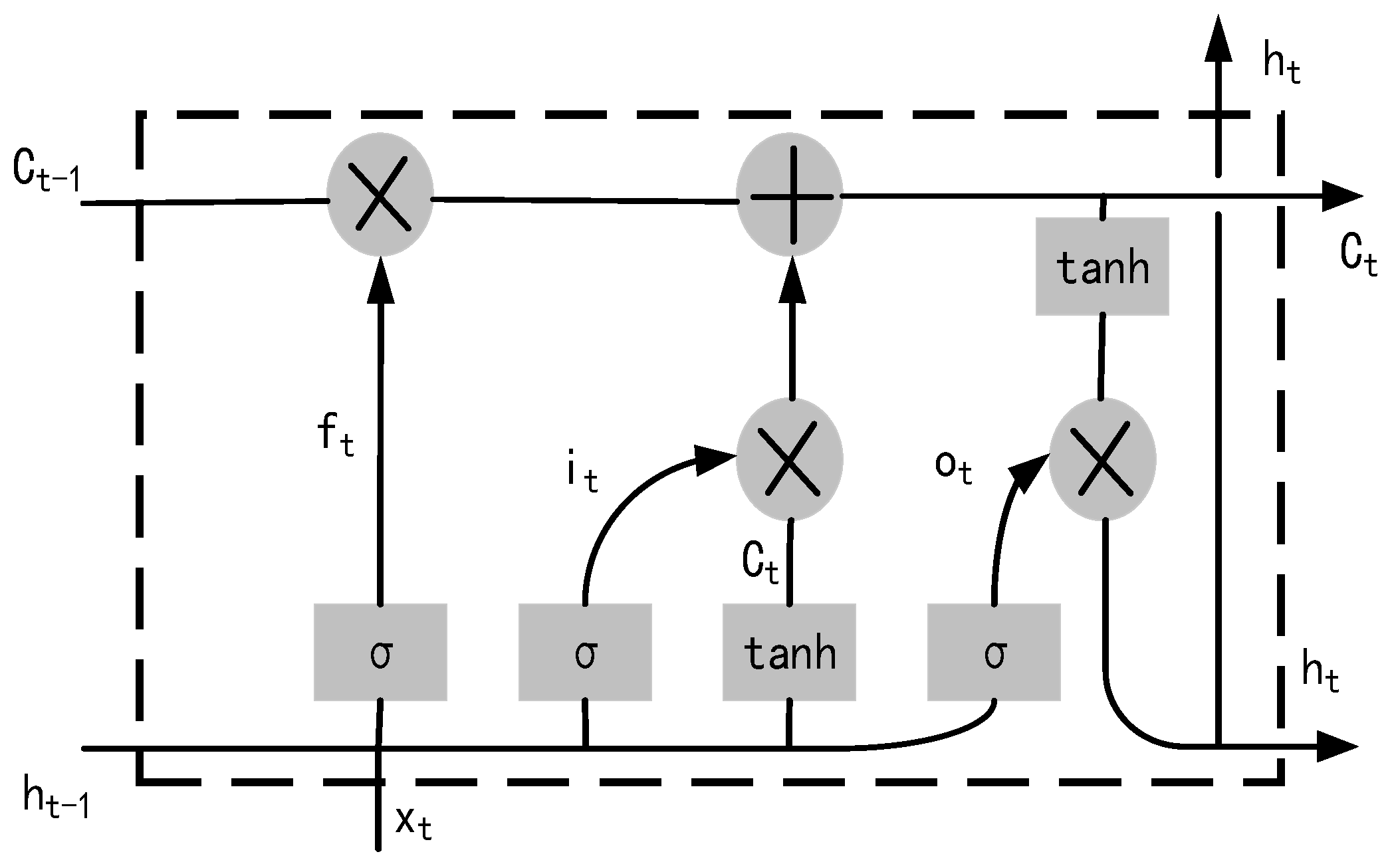
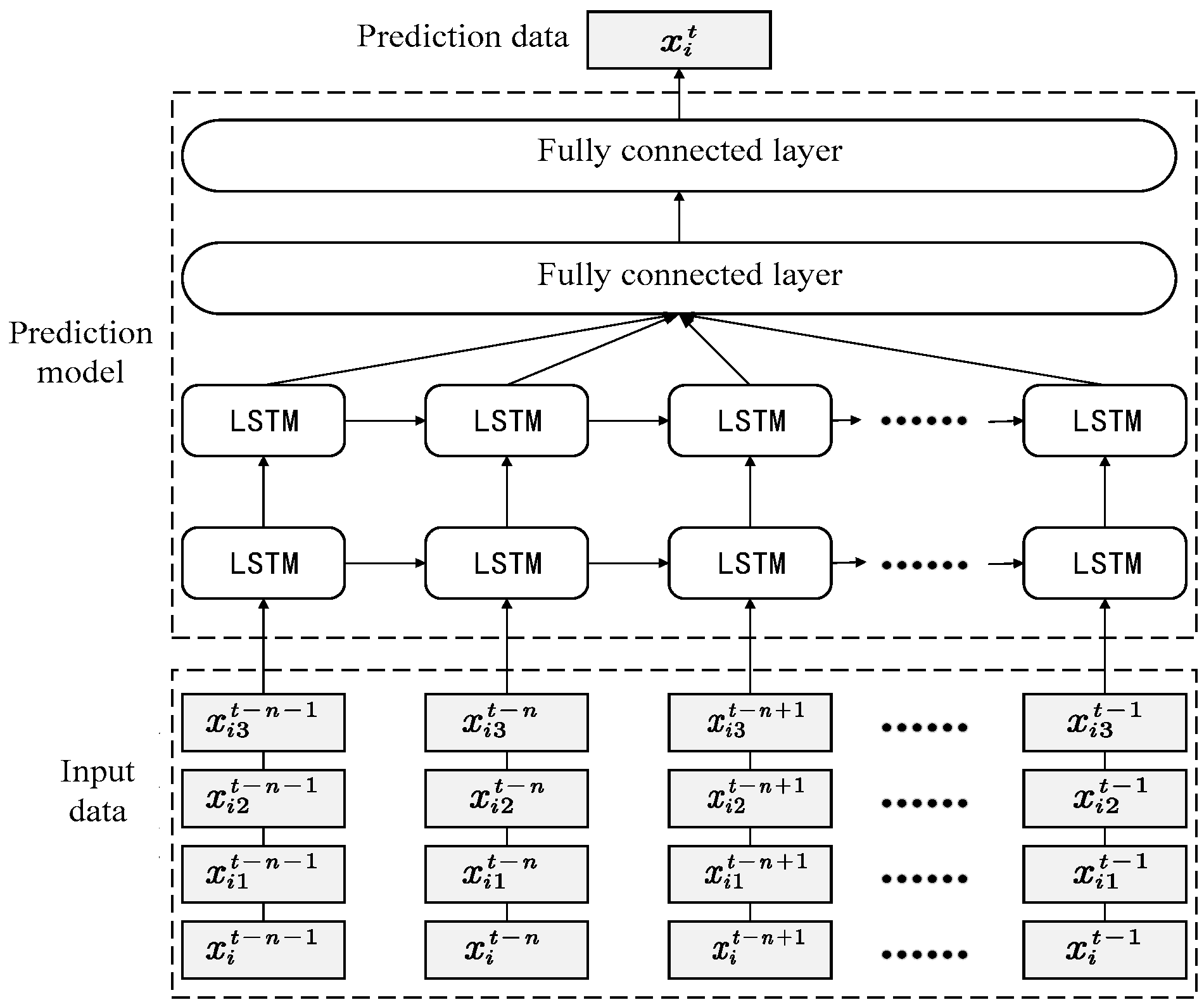
2.2.3. LSTM Neural Network Model
3. Methodology
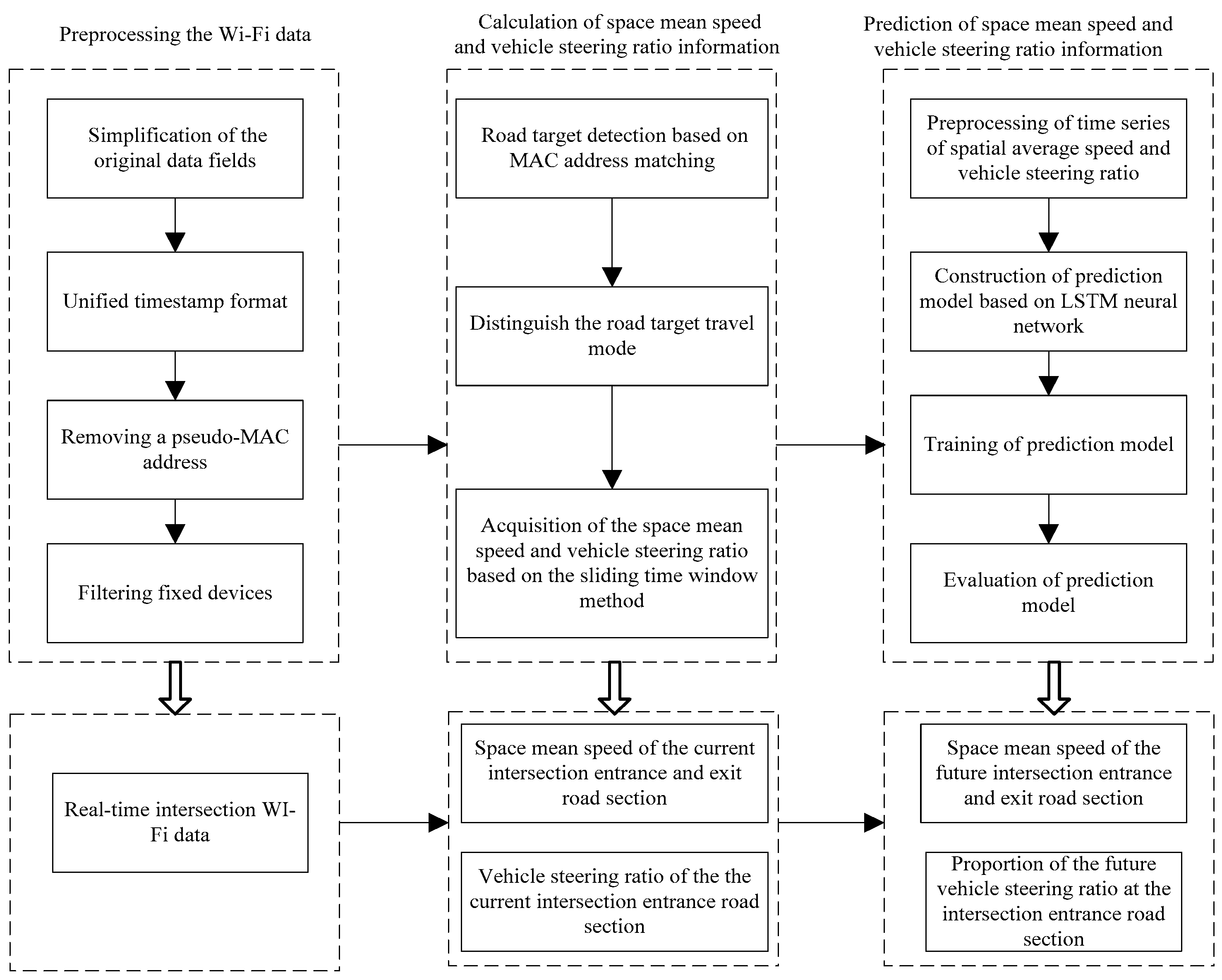
3.1. Traffic Information Detection Process
3.2. Preprocessing the Wi-Fi Data
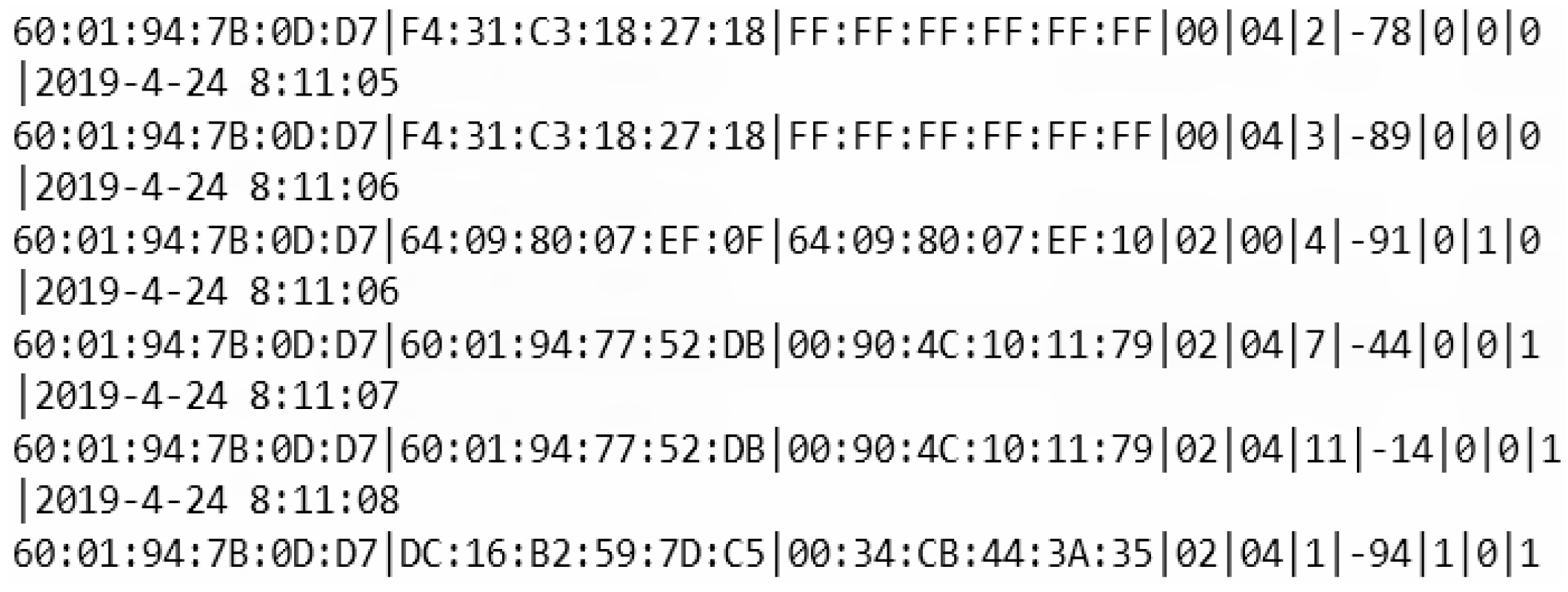
3.2.1. Simplification of the Original Data Fields
3.2.2. Unified Timestamp Format
3.2.3. Removing a Pseudo-MAC Address
3.2.4. Filtering Fixed Devices
3.3. Calculation of Intersection Data
3.3.1. Road Target Detection Based on MAC Address Matching
3.3.2. Distinguish the Road Target Travel Mode
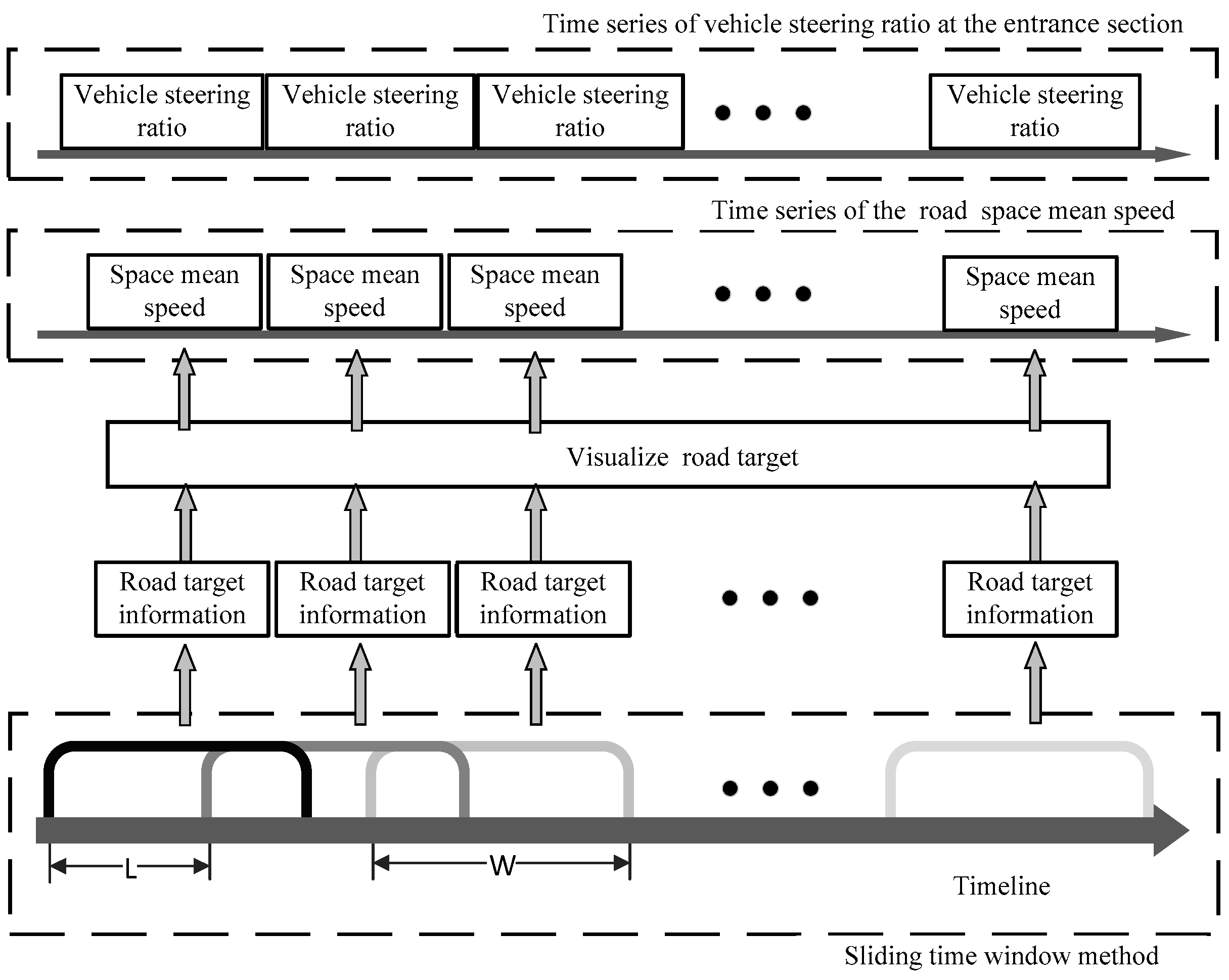
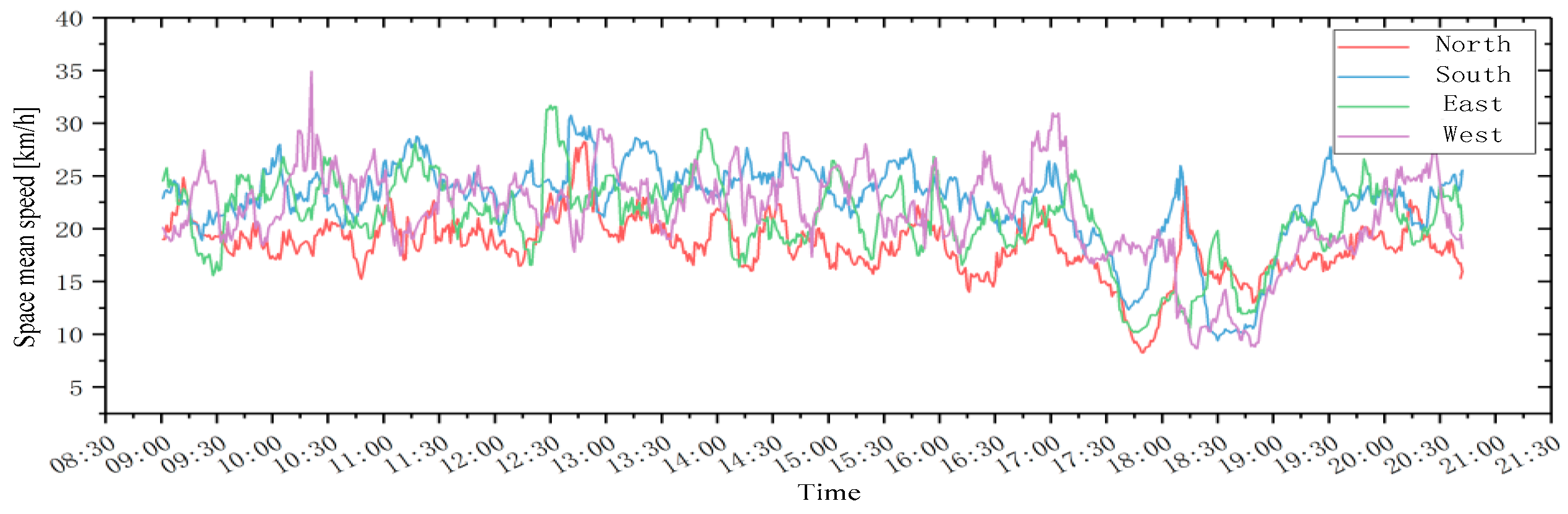
3.3.3. Calculation of Intersection Space Mean Speed and Vehicle Steering Ratio
3.4. Traffic Data Prediction Model of the Intersection Entrance Section
3.4.1. Training Data Preprocessing
- (1)
- When the traffic data represents the spatial average speed, the maximum value should be the highest speed limit of the road section. Speed data exceeding this maximum value and zero-value data should be marked as missing data.
- (2)
- When the traffic data are the vehicle steering ratio, the zero value data of the steering ratio should be marked as missing data. Finally, missing data in the time series are uniformly filled using the average of the adjacent data.
- (1)
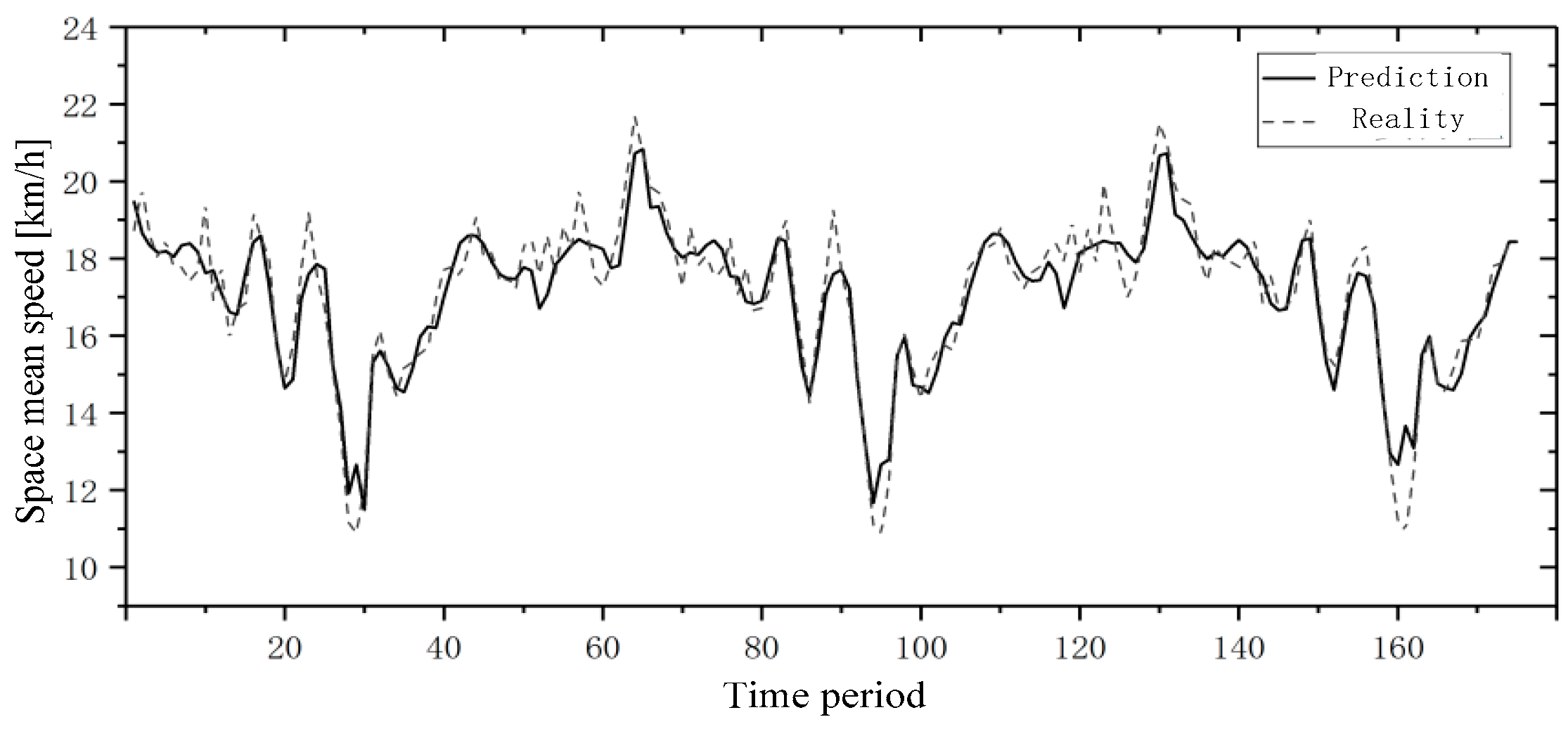
- When the traffic data are the spatial average speed, their values and fluctuation amplitudes are relatively large. The min–max method is adopted to normalize the speed data, which can reduce the size differences of the speed time series and accelerate the convergence process of LSTM neural network training, thereby improving the prediction effect.
- (2)
- When the traffic data are the vehicle steering ratio, no such operation is required.
- (1)
- When the traffic data are the space mean speed, i is the number of the entrance section of the intersection that needs to be predicted in (16). , , and are the numbers of the downstream left turn, straight, and right turn in intersection exit sections corresponding to the entrance section. The speed data of the entrance section and the three downstream exit sections, which include the current time period and the first time period, are taken to predict the space mean speed of the entrance section in the future time period.
- (2)
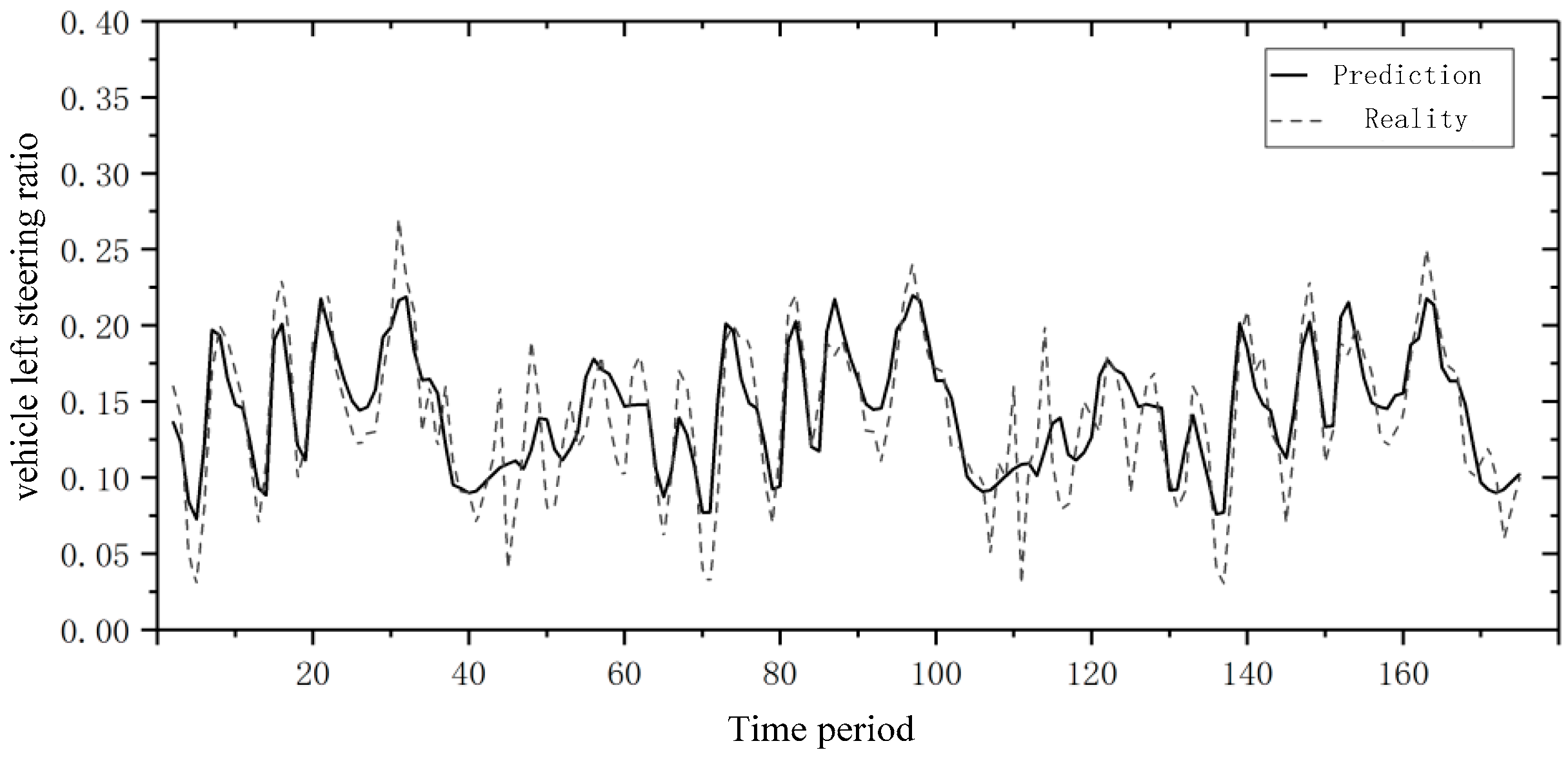
- When the traffic data x are the vehicle steering ratio, i is the number of the entrance section of the intersection that needs to be predicted in (16). , , and are the corresponding numbers of the other three road entrance sections, except the current road entrance section. The vehicle steering ratio data of the entrance itself and the other three entrance sections, including the input data of the current time period and the previous time period, are taken to predict the vehicle steering ratio of the entrance section in the future time period.
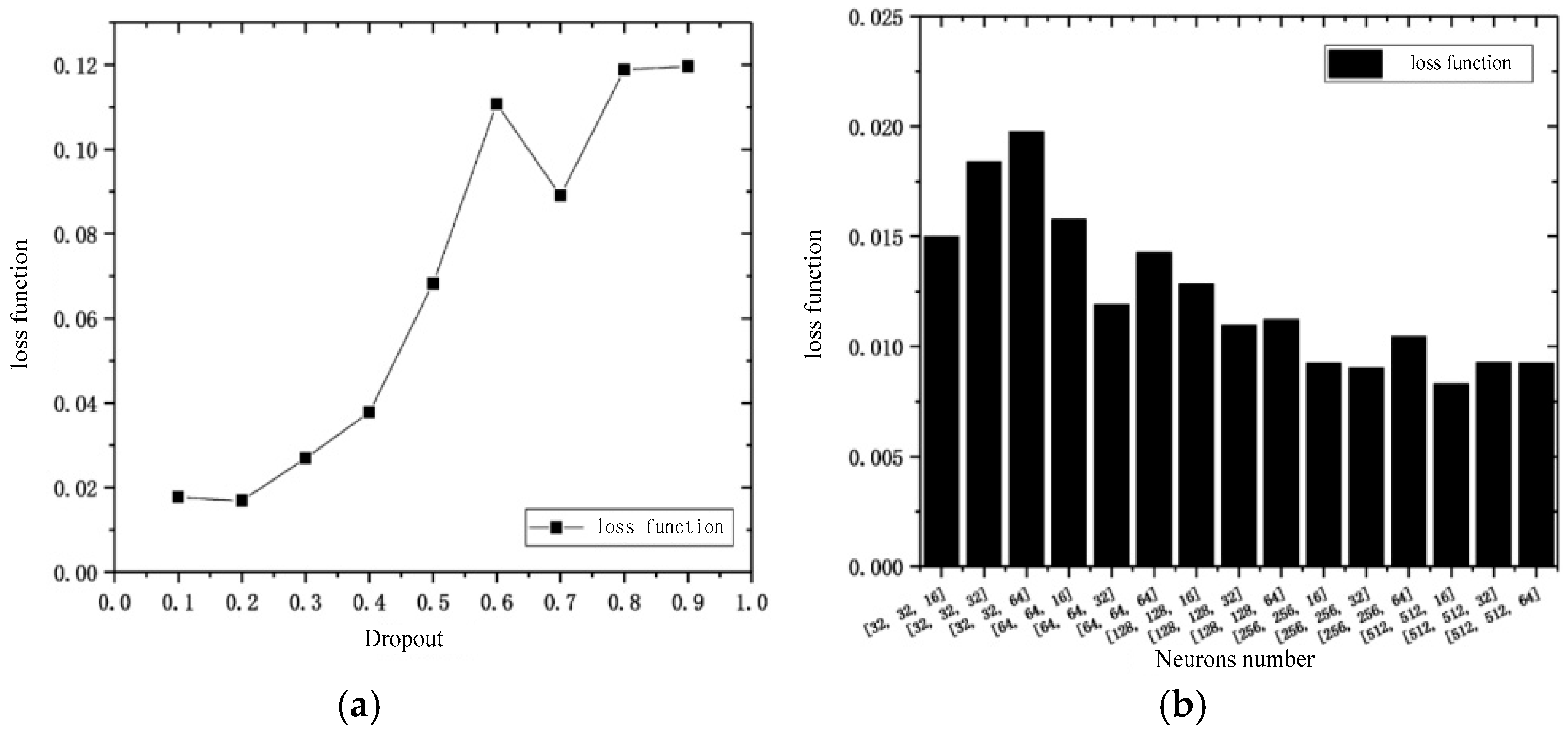
3.4.2. Model Construction
3.4.3. Model Evaluation Index
4. Experiment and Result Analysis
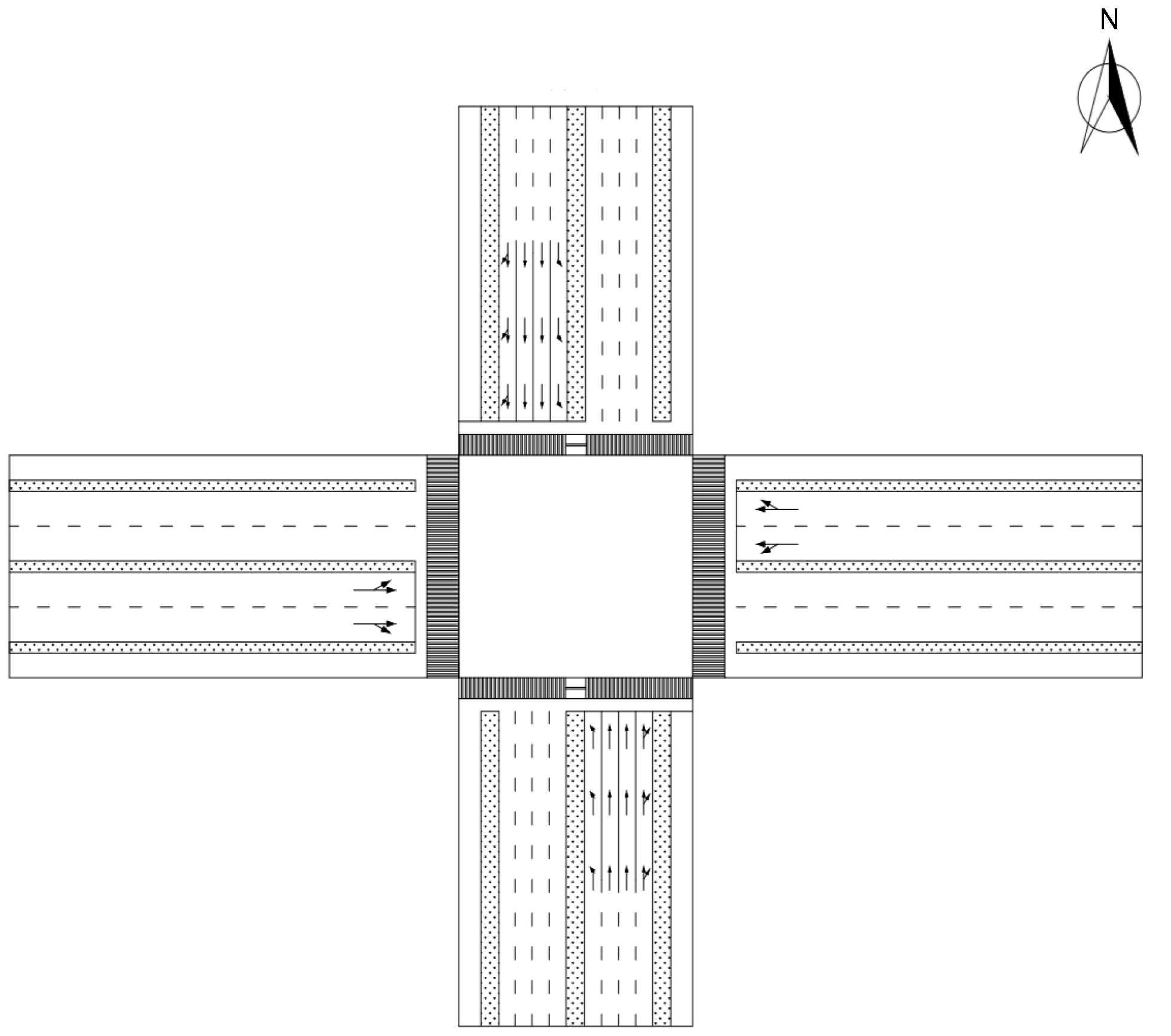
4.1. Experimental Intersection Information
4.2. Traffic Information Detection
4.3. Predictive Model Training and Verification
5. Conclusions
- (1)
- The hardware architecture of Wi-Fi data acquisition equipment is determined to realize the collection of Wi-Fi data at a single intersection.
- (2)
- This study combined MAC address matching, k-means clustering, sliding time window, and other algorithms to process and analyze the Wi-Fi data of a single intersection and realize the detection of the spatial average speed of the entrance and exit sections of a single intersection and the vehicle turning proportion information of the entrance section.
- (3)
- The function of a single-point intersection traffic information detection scheme based on Wi-Fi data acquisition equipment is expanded. The traffic data prediction model of the intersection inlet section based on the LSTM neural network is constructed, and the training of the prediction model is completed in the Keras framework so as to predict the spatial average speed and vehicle turning ratio of the intersection inlet section.
- (1)
- Taking into account the influence of the surrounding environment, in our subsequent research, we will adopt complementary technologies to expand the research scope to multiple intersections and also consider the impact of complex environments (different days, seasons, weather conditions, etc.) on the collection of Wi-Fi signals.
- (2)
- Multi-step prediction and sliding-window forecasting approaches are the research directions for us in the future.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Danesh, A.; Ma, W.; Wang, L. Identifying the adaptability of different control types based on delay and capacity for isolated intersection. Transport. Res. Rec. 2023, 2677, 33–45. [Google Scholar] [CrossRef]
- Wu, J.J. Congestion control method for urban traffic intersections by integrating Internet of Things and traffic flow data. Comput. Inform. Mech. Syst. 2022, 5, 86–91. [Google Scholar]
- Zhang, Y.; Shang, K.; Cui, Z.; Zhang, Z.; Zhang, F. Research on traffic flow prediction at intersections based on DT-TCN-attention. Sensors 2023, 23, 6683. [Google Scholar] [CrossRef] [PubMed]
- Xu, M.; Qiu, T.Z.; Fang, J.; He, H.; Chen, H. Signal-control refined dynamic traffic graph model for movement-based arterial network traffic volume prediction. Exp. Syst. Appl. 2023, 228, 120393. [Google Scholar] [CrossRef]
- Azimjonov, J.; Özmen, A.; Varan, M. A vision-based real-time traffic flow monitoring system for road intersections. Multimed. Tools Appl. 2023, 82, 25155–25174. [Google Scholar] [CrossRef]
- Yue, G.; Li, Z.; Tao, Y.; Jin, T. Low-illumination traffic object detection using the saliency region of infrared image masking on infrared-visible fusion image. J. Electron. Imaging. 2022, 31, 3. [Google Scholar] [CrossRef]
- Liu, C.C.; Liang, Y.P.; Zhang, X.L. The analysis and advanced development of traffic flow information acquisition technology in ITS. Appl. Mech. Mater. 2014, 536, 828–832. [Google Scholar] [CrossRef]
- Guo, C.; Li, D.; Chen, X. Unequal Interval Dynamic Traffic Flow Prediction with Singular Point Detection. Appl. Sci. 2023, 13, 8979. [Google Scholar] [CrossRef]
- Liu, H.; Teng, K.; Rai, L.; Zhang, Y.; Wang, S. A two-step abnormal data analysis and processing method for millimetre-wave radar in traffic flow detection applications. IET Intell. Transp. Syst. 2021, 15, 671–682. [Google Scholar] [CrossRef]
- Huang, S.; Sun, D.; Zhao, M.; Chen, J.; Chen, R. Short-term traffic flow prediction approach incorporating vehicle functions from RFID-ELP data for urban road sections. IET Intell. Transp. Syst. 2023, 17, 144–164. [Google Scholar] [CrossRef]
- Bhargava, K.; Wah Choy, K.; Jennings, P.A.; Higgins, M.D. Novel mathematical model to determine geo-referenced locations for C-ITS communications to generate dynamic vehicular gaps. IET Intell. Transp. Syst. 2021, 14, 2010–2020. [Google Scholar] [CrossRef]
- Iqbal, R.; Yukimatsu, K. Intelligent transportation systems using short range wireless technologies. J. Transport. Technol. 2011, 1, 132–137. [Google Scholar] [CrossRef]
- Radu, V.; Kriara, L.; Marina, M.K. Pazl: A mobile crowdsensing based indoor WiFi monitoring system. In Proceedings of the 9th International Conference on Network and Service Management (CNSM 2013), Zurich, Switzerland, 14–18 October 2013. [Google Scholar]
- Gao, S.; Liu, Y.; Wang, Y.; Ma, X. Discovering spatial interaction communities from mobile phone data. Trans. Gis. 2013, 17, 463–481. [Google Scholar] [CrossRef]
- Prentow, T.S.; Ruiz-Ruiz, A.J.; Blunck, H.; Stisen, A.; Kjærgaard, M.B. Spatio-temporal facility utilization analysis from exhaustive wifi monitoring. Pervasive Mob. Comput. 2015, 16, 305–316. [Google Scholar] [CrossRef]
- Cunche, M. I know your MAC address: Targeted tracking of individual using Wi-Fi. J. Comput. Virol. Hack. Tech. 2014, 10, 219–227. [Google Scholar] [CrossRef]
- Hidayat, A.; Terabe, S.; Yaginuma, H. Determine non-passenger data from WiFi scanner data (MAC address), a case study: Romango bus, Obuse, Nagano prefecture, Japan. Int. Rev. Spat. Plan. Sustain. Dev. 2018, 6, 154–167. [Google Scholar] [CrossRef]
- Xu, Z.; Zhao, J.; Lin, C. Pedestrain monitoring system using Wi-Fi technology and RSSI based localization. Int. J. Wirel. Mobile Netw. 2013, 5, 17–34. [Google Scholar] [CrossRef]
- Zhao, F.; Shi, W.; Gan, Y.; Peng, Z.; Luo, X. A localization and tracking scheme for target gangs based on big data of Wi-Fi locations. Cluster Comput. 2019, 22, 1679–1690. [Google Scholar] [CrossRef]
- Huang, Z.; Xu, L.; Lin, Y. Multi-stage pedestrian positioning using filtered WiFi scanner data in an urban road environment. Sensors 2020, 20, 3259. [Google Scholar] [CrossRef]
- Zhang, S.; Ni, B. Science and education integration mode python-c experimental teaching research design of WiFi line avoidance vehicle. In Communications, Signal Processing, and Systems; Springer: Singapore, 2023. [Google Scholar]
- Kochańska, J.; Burduk, A.; Markowski, M.; Klusek, A.; Wojciechowska, M. Improvement of factory transport efficiency with use of WiFi-based technique for monitoring industrial vehicles. Sustainability 2023, 15, 1113. [Google Scholar] [CrossRef]
- Chen, H.C.; Lin, R.S.; Huang, C.J.; Tian, L.; Su, X.; Yu, H. Bluetooth-controlled parking system based on WiFi positioning technology. Sens. Mater. 2022, 34, 1179–1189. [Google Scholar] [CrossRef]
- Mazokha, S.; Bao, F.; Zhai, J.; Hallstrom, J.O. MobIntel: Sensing and analytics infrastructure for urban mobility intelligence. Pervasive Mob. Comput. 2021, 77, 101475. [Google Scholar] [CrossRef]
- Oransirikul, T.; Nishide, R.; Piumarta, I.; Takada, H. Measuring bus passenger load by monitoring Wi-Fi transmissions from mobile devices. Procedia Technol. 2014, 18, 120–125. [Google Scholar] [CrossRef]
- Hidayat, A.; Terabe, S.; Yaginuma, H. WiFi scanner technologies for obtaining travel data about circulator bus passengers: Case study in Obuse, Nagano prefecture, Japan. Transport. Res. Rec. 2018, 2672, 45–54. [Google Scholar] [CrossRef]
- Hidayat, A.; Terabe, S.; Yaginuma, H. Estimating bus passenger volume based on a Wi-Fi scanner survey. Transp. Res. Interdiscip. Perspect. 2020, 6, 100142. [Google Scholar] [CrossRef]
- Ahmed, H.; El-Darieby, M.; Morgan, Y.; Abdulhai, B. A wireless mesh network-based platform for ITS. In Proceedings of the VTC Spring 2008—IEEE Vehicular Technology Conference, Marina Bay, Singapore, 11–14 May 2008. [Google Scholar]
- Vieira, T.; Almeida, P.; Meireles, M.; Ribeiro, R. Public transport occupancy estimation using WLAN probing and mathematical modeling. Transport. Res. Procedia. 2020, 48, 3299–3309. [Google Scholar] [CrossRef]
- Won, M.; Zhang, S.; Son, S.H. WiTraffic: Low-Cost and Non-Intrusive Traffic Monitoring System Using WiFi. In Proceedings of the 2017 26th International Conference on Computer Communication and Networks (ICCCN), Vancouver, BC, Canada, 31 July–3 August 2017. [Google Scholar]
- Oransirikul, T.; Piumarta, I.; Takada, H. Classifying passenger and non-passenger signals in public transportation by analysing mobile device Wi-Fi activity. J. Inf. Process. 2019, 27, 25–32. [Google Scholar] [CrossRef]
- Leng, B.; Huang, L.; Qiao, C.; Xu, H. Urban Traffic Condition Estimation: Let WiFi Do It. In Proceedings of the 2016 13th Annual IEEE International Conference on Sensing, Communication, and Networking (SECON), London, UK, 27–30 June 2016. [Google Scholar]
- Marakkalage, S.H.; Yuen, C.; Yow, W.Q.; Chong, K.H. WiFi fingerprint clustering for urban mobility analysis. IEEE Access. 2021, 9, 69527–69538. [Google Scholar] [CrossRef]
- Cai, X.; Tan, J.; Lu, Z. Multi mobile robot positioning technology and path planning design based on WiFi Positioning. In Proceedings of the 2022 International Conference on Computer, Electronic and Materials Engineering (ICCEME 2022), Taiyuan, China, 18–19 June 2022. [Google Scholar]
- Alam, S.S.; Al-Qurishi, M.; Souissi, R. Estimating indoor crowd density and movement behavior using WiFi sensing. Front. Internet Things 2022, 1. [Google Scholar] [CrossRef]
- Asim, M.A.; Kattan, L.; Wirasinghe, S.C. Smartphone: A source for transit service planning and management using WIFI sensor data. In Proceedings of the Canadian Society of Civil Engineering Annual Conference 2021, Whistler, BC, Canada, 26–29 May 2021. [Google Scholar]
- Hidayat, A.; Terabe, S.; Yaginuma, H. Mapping of MAC Address with Moving WiFi Scanner. Int. J. Artif. Intell. Res. 2017, 1, 34–40. [Google Scholar] [CrossRef]
- Rao, W.; Xia, J.; Lyu, W.; Lu, Z. Interval data-based k-means clustering method for traffic state identification at urban intersections. IET Intell. Transp. Syst. 2019, 13, 1106–1115. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| MAC Addresses | Timestamp | RSS |
|---|---|---|
| 50:XX:55:0F:F9:00 | 2019.4.24 08:25:01 | −87 |
| 78:XX:51:07:1E:19 | 2019.4.24 08:25:01 | −85 |
| F0:XX:98:12:47:B5 | 2019.4.24 08:50:33 | −44 |
| 94:XX:29:7E:92:FD | 2019.4.24 09:52:06 | −75 |
| B4:XX:44:EB:B6:0F | 2019.4.24 12:20:26 | −7 |
| 1C:XX:CE:53:1E:23 | 2019.4.24 12:32:34 | −90 |
| D4:XX:3F:46:68:67 | 2019.4.24 15:53:45 | −94 |
| 00:XX:4C:10:11:82 | 2019.4.24 08:50:56 | −39 |
| Layer Number | Layer | Layer Number | Layer |
|---|---|---|---|
| 1 | LSTM layer | 4 | Dropout layer |
| 2 | Dropout layer | 5 | Dense layer |
| 3 | LSTM layer | 6 | Dense layer |
| Device Group Number | The Coordinate of Latitude and Longitude | Distance from Intersection (m) |
|---|---|---|
| 1 | [108.953867, 4.336224] | 0 |
| 2 | [108.953525, 4.335852] | 0 |
| 3 | [108.944506, 4.336089] | 831 |
| 4 | [108.953489, 4.332886] | 336 |
| 5 | [108.960119, 4.335911] | 574 |
| 6 | [108.953885, 4.339578] | 388 |
| Error | North | South | East | West |
|---|---|---|---|---|
| RMSE (Textual reconstruction method) | 0.01713 | 0.01642 | 0.02594 | 0.02041 |
| MAPE (Textual reconstruction method) | 12.8634 | 10.07899 | 10.1695 | 11.9669 |
| RMSE | 0.017605 | 0.021753 | 0.02827 | 0.02743 |
| MAPE | 13.69658 | 13.15832 | 10.5006 | 12.2864 |
| Error | North | South | East | West |
|---|---|---|---|---|
| RMSE (Textual reconstruction method) | 0.64729 | 0.93593 | 0.99953 | 0.958572 |
| MAPE (Textual reconstruction method) | 2.79431 | 3.26728 | 3.41611 | 3.6238 |
| RMSE | 0.66443 | 1.067952 | 1.25264 | 0.72434 |
| MAPE | 3.10929 | 3.50150 | 4.48097 | 2.93503 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Feng, J.; Li, S. A Traffic Information Detection Method at Single Intersection Based on Wi-Fi Data. Appl. Sci. 2025, 15, 5407. https://doi.org/10.3390/app15105407
Wang Q, Feng J, Li S. A Traffic Information Detection Method at Single Intersection Based on Wi-Fi Data. Applied Sciences. 2025; 15(10):5407. https://doi.org/10.3390/app15105407
Chicago/Turabian StyleWang, Qingmiao, Jinghe Feng, and Shuguang Li. 2025. "A Traffic Information Detection Method at Single Intersection Based on Wi-Fi Data" Applied Sciences 15, no. 10: 5407. https://doi.org/10.3390/app15105407
APA StyleWang, Q., Feng, J., & Li, S. (2025). A Traffic Information Detection Method at Single Intersection Based on Wi-Fi Data. Applied Sciences, 15(10), 5407. https://doi.org/10.3390/app15105407