
Usability Test for an Over-Ground Walking Assistance Robotic Device Based on the Mecanum Wheel


Abstract
1. Introduction
2. Methods
2.1. Participants
2.2. Procedure
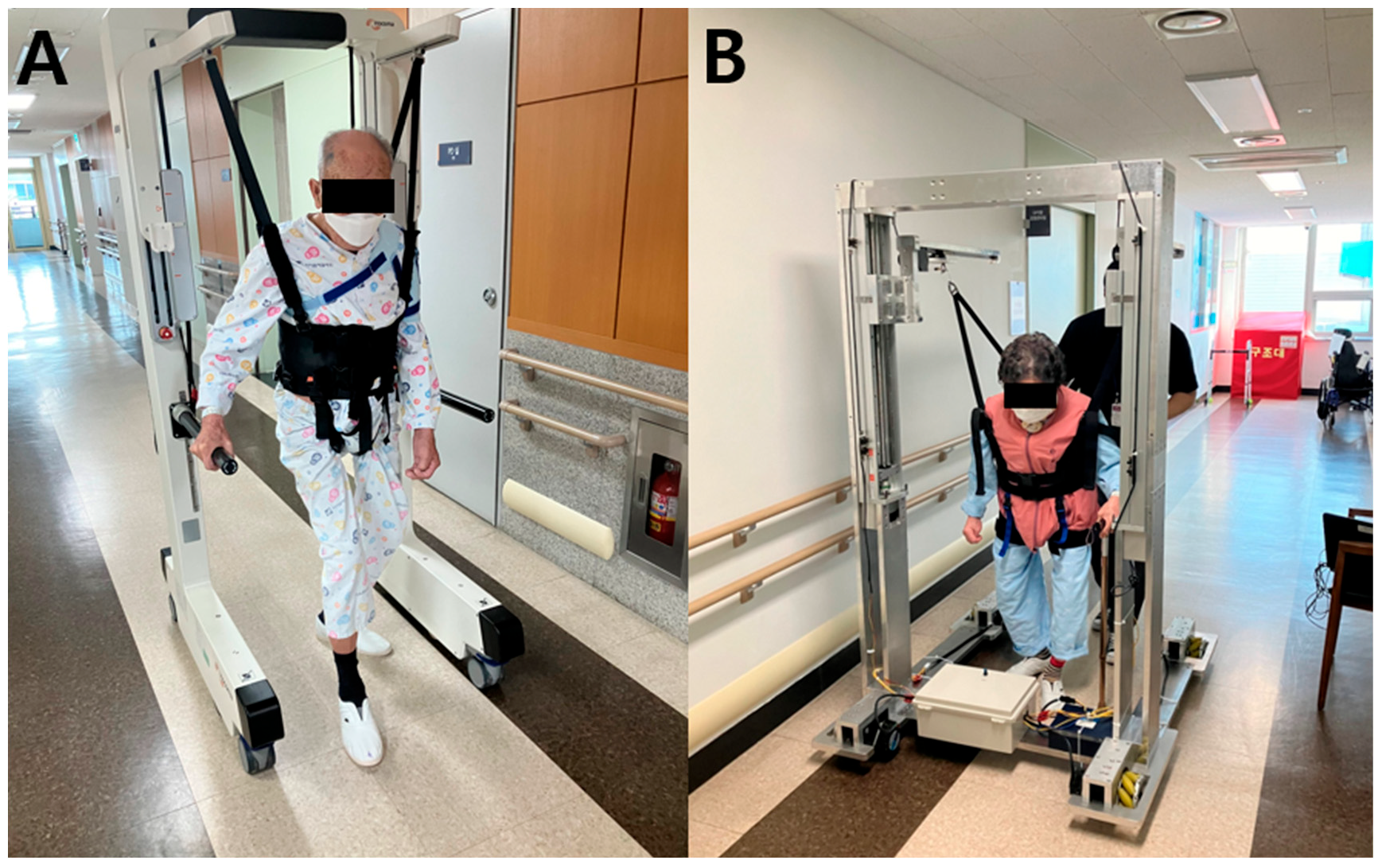
2.3. Commercialized Over-Ground Walking Assistance Robot (COWAR)
2.4. Over-Ground Walking Assistance Robotic Device Based on Mecanum Wheel (OWAR-MW)
2.5. Usability Test
2.6. Data Analysis
3. Results
3.1. Satisfaction Results for COWAR and OWAR-MW in Physical Therapists and Patients with Stroke
3.2. Main Findings for In-Depth Interviews
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Health Insurance Review & Assessment Service (HIRA). Current Status of Treatment for Cerebrovascular Diseases; Health Insurance Review & Assessment Service (HIRA): Wonju, Republic of Korea, 2023.
- Kelly-Hayes, M.; Beiser, A.; Kase, C.S.; Scaramucci, A.; D’Agostino, R.B.; Wolf, P.A. The influence of gender and age on disability following ischemic stroke: The Framingham study. J. Stroke Cerebrovasc. Dis. 2003, 12, 119–126. [Google Scholar] [CrossRef] [PubMed]
- Balaban, B.; Tok, F. Gait disturbances in patients with stroke. PM & R 2014, 6, 635–642. [Google Scholar] [CrossRef] [PubMed]
- Marks, D.; Schweinfurther, R.; Dewor, A.; Huster, T.; Paredes, L.P.; Zutter, D.; Möller, J.C. The Andago for overground gait training in patients with gait disorders after stroke—Results from a usability study. Physiother. Res. Rep. 2019, 2, 1–8. [Google Scholar] [CrossRef]
- Koceska, N.; Koceski, S. Robot devices for gait rehabilitation. Int. J. Comput. Appl. 2013, 62, 1–8. [Google Scholar] [CrossRef]
- Calabrò, R.S.; Cacciola, A.; Bertè, F.; Manuli, A.; Leo, A.; Bramanti, A.; Naro, A.; Milardi, D.; Bramanti, P. Robotic gait rehabilitation and substitution devices in neurological disorders: Where are we now? Neurol. Sci. 2016, 37, 503–514. [Google Scholar] [CrossRef] [PubMed]
- Tay, S.S.; Neo, E.J.; Tam, M.M.; Tan, P.L. Post-critical care COVID-19 patient benefits from a robotic patient-guided suspension system for pulmonary rehabilitation. Ann. Acad. Med. Singap. 2020, 49, 401–404. [Google Scholar] [CrossRef] [PubMed]
- Mehrholz, J.; Thomas, S.; Kugler, J.; Pohl, M.; Elsner, B. Electromechanical-assisted training for walking after stroke. Cochrane Database Syst. Rev. 2020, 10, CD006185. [Google Scholar] [CrossRef] [PubMed]
- Hidler, J.; Brennan, D.; Black, I.; Nichols, D.; Brady, K.; Nef, T. ZeroG: Overground gait and balance training system. J. Rehabil. Res. Dev. 2011, 48, 287–298. [Google Scholar] [CrossRef]
- Schmidt, H.; Hesse, S.; Berhardt, R.; Kruger, J. HapticWalker—A novel haptic foot device. ACM Trans. Appl. Percept. 2005, 2, 166–180. [Google Scholar] [CrossRef]
- Mikolajczyk, T.; Ciobanu, I.; Badea, D.I.; Iliescu, A.; Pizzamiglio, S.; Schauer, T.; Seel, T.; Seiciu, P.L.; Turner, D.L.; Berteanu, M. Advanced technology for gait rehabilitation: An overview. Adv. Mech. Eng. 2018, 10, 1687814018783627. [Google Scholar] [CrossRef]
- Fay, A.; Synott, E.; McDaid, E.; Barrett, E. A comparison of the immediate effects of the Andago over ground body weight support trainer versus over ground walking on selected gait parameters in a post-acute rehabilitation population. Physiother. Theory Pract. 2024, 40, 767–777. [Google Scholar] [CrossRef] [PubMed]
- van Hedel, H.J.; Rosselli, I.; Baumgartner-Ricklin, S. Clinical utility of the over-ground bodyweight-supporting walking system Andago in children and youths with gait impairments. J. Neuroeng. Rehabil. 2021, 18, 29. [Google Scholar] [CrossRef]
- Li, X.Y.; An, Q.; Choi, K.R. A study on behavior analysis and scenario-based furniture design through user observation—Focus on seniors walker design. Korean Soc. Sci. Art 2023, 41, 403–413. [Google Scholar] [CrossRef]
- Kim, J. Efforts and challenges for medical robots in South Korea. J. Inst. Control Robot. Syst. 2024, 30, 423–427. [Google Scholar] [CrossRef]
- Sabino, I.; do Carmo Fernandes, M.; Cepeda, C.; Quaresma, C.; Gamboa, H.; Nunes, I.L.; Gabriel, A.T. Ergo4workers: Usability testing of the second prototype of an app for the ergonomic assessment of healthcare professionals. In Occupational and Environmental Safety and Health V, Studies in Systems, Decision and Control; Springer: Cham, Switzerland, 2023; pp. 99–108. [Google Scholar] [CrossRef]
- Moustris, G.; Kardaris, N.; Tsiami, A.; Chalvatzaki, G.; Koutras, P.; Dometios, A.; Oikonomou, P.; Tzafestas, C.; Maragos, P.; Efthimiou, E.; et al. The i-walk lightweight assistive rollator: First evaluation study. Front. Robot. AI 2024, 100, 103570. [Google Scholar] [CrossRef]
- Hocoma. Andago–Robotic Gait Training. Available online: https://www.hocoma.com/solutions/andago/ (accessed on 1 April 2025).
- The Support Center for Senior Friendly Industry Under the Korea Health Industry Development Institute. Available online: https://www.khidi.or.kr/board?menuId=MENU00310&siteId=SITE00003 (accessed on 1 April 2025).
- van Hedel, H.J.; Bulloni, A.; Gut, A. Prefrontal cortex and supplementary motor area activation during robot-assisted weight-supported over-ground walking in young neurological patients: A pilot fNIRS study. Front. Rehabil. Sci. 2021, 2, 788087. [Google Scholar] [CrossRef]
- San Tay, S.; Visperas, C.A.; Abideen, A.B.Z.; Tan, M.M.J.; Zaw, E.M.; Lai, H.; Neo, E.J.R. Effectiveness of adjunct robotic therapy with a patient-guided suspension system for stroke rehabilitation using a 7-days-a-week model of care: A comparison with conventional rehabilitation. Arch. Rehabil. Res. Clin. Transl. 2021, 3, 100144. [Google Scholar] [CrossRef]
- Fay, A.; Synott, E.; McDaid, E.; Barrett, E. The influence of the ANDAGO® on gait parameters among older adults in the post-acute rehabilitation setting: A pilot study. Age Ageing 2022, 51, afac218.091. [Google Scholar] [CrossRef]
- Cowan, R.E.; Fregly, B.J.; Boninger, M.L.; Chan, L.; Rodgers, M.M.; Reinkensmeyer, D.J. Recent trends in assistive technology for mobility. J. Neuroeng. Rehabil. 2012, 9, 20. [Google Scholar] [CrossRef]
- Demiral, D.G. Emerging assistive technologies and challenges encountered. In Current Studies in Technology, Innovation and Entrepreneurship; ISRES Publisher: Konya, Turkey, 2023; Volume 1, pp. 1–21. [Google Scholar]


{kind=link}
{kind=link}
| Parameters | Physical Therapists (n = 9) | Stroke (n = 9) |
|---|---|---|
| Sex (male/female) | 4/5 | 2/7 |
| Age (years) | 29.44 ± 6.61 | 77.33 ± 8.50 |
| Height (cm) | 164.89 ± 12.84 | 158.44 ± 9.88 |
| Weight (kg) | 65.44 ± 12.78 | 58.17 ± 7.42 |
| BMI (kg/m2) | 23.99 ± 3.36 | 23.27 ± 3.14 |
| Clinical experiences (years) | 5.33 ± 5.67 | - |
| Onset duration (month) | - | 6.22 ± 2.68 |
| Affected side (Right/Left) | - | 3/6 |
| MAS, lower extremity (0/1) | - | 8/1 |
| MMT, knee extensor (P/F/G) | - | 2/5/2 |
| FAC (0/1/2) | - | 1/1/7 |
| BBS (score) | - | 24.22 ± 9.90 |
| MBI (score) | - | 58.56 ± 14.57 |
| K-MMSE (score) | - | 25.11 ± 2.03 |
| Questions by Categories | Physical Therapists (n = 9) | Stroke (n = 9) | |||||
|---|---|---|---|---|---|---|---|
| COWAR | OWAR-MW | Changes (%) † | COWAR | OWAR-MW | Changes (%) † | ||
| S | Does the device safely support the body when leaned on? | 4.67 ± 0.50 | 3.78 ± 1.30 | 0.89 ± 1.45 (19.05) | 5.00 ± 0.00 | 4.33 ± 1.12 | 0.67 ± 1.12 (13.33) |
| Is there no slipping risk when the device is pushed while stationary? | 4.22 ± 0.67 | 3.44 ± 1.13 | 0.78 ± 0.97 (18.42) | 4.56 ± 0.88 | 4.78 ± 0.44 | −0.22 ± 1.09 (4.88) | |
| Are there no safety risks during straight-line movement? | 4.22 ± 0.67 | 3.22 ± 1.09 | 1.00 ± 1.22 (23.68) * | 5.00 ± 0.00 | 4.11 ± 1.05 | 0.89 ± 1.05 (17.78) * | |
| Are there no safety risks during direction changes? | 3.89 ± 0.60 | 2.89 ± 1.17 | 1.00 ± 1.12 (25.71) * | 4.89 ± 0.33 | 3.44 ± 1.33 | 1.44 ± 1.51 (29.55) * | |
| Is the speed of directional changes appropriate? | 3.56 ± 0.88 | 3.22 ± 1.09 | 0.33 ± 1.50 (9.37) | 5.00 ± 0.00 | 4.00 ± 1.22 | 1.00 ± 1.22 (20.00) * | |
| Is in-place rotation performed safely without risk? | 3.56 ± 1.13 | 3.33 ± 1.00 | 0.22 ± 0.83 (6.25) | 4.89 ± 0.33 | 3.56 ± 1.42 | 1.33 ± 1.58 (27.27) * | |
| Is the device safe to use without the risk of bodily injury? | 4.00 ± 0.87 | 3.67 ± 1.22 | 0.33 ± 0.87 (8.33) | 5.00 ± 0.00 | 4.00 ± 1.22 | 1.00 ± 1.22 (20.00) * | |
| Safety average | 4.02 ± 0.83 | 3.37 ± 1.13 | 0.65 ± 1.15 (16.21) * | 4.90 ± 0.39 | 4.04 ± 1.18 | 0.87 ± 1.31 (17.80) * | |
| OF | Is the operation method easy to understand? | 4.11 ± 0.78 | 4.00 ± 1.00 | 0.11 ± 1.05 (2.70) | 4.44 ± 1.13 | 4.33 ± 1.00 | 0.11 ± 1.54 (2.50) |
| Is the driving method simple and convenient? | 4.33 ± 0.71 | 4.00 ± 0.87 | 0.33 ± 0.87 (7.69) | 4.89 ± 0.33 | 3.67 ± 1.00 | 1.22 ± 0.97 (25.00) * | |
| Does the device move as intended by the user? | 3.56 ± 1.24 | 3.78 ± 1.20 | −0.22 ± 1.09 (6.25) | 5.00 ± 0.00 | 4.33 ± 0.71 | 0.67 ± 0.71 (13.33) * | |
| Is it easy to change direction as intended? | 3.44 ± 1.33 | 3.56 ± 1.01 | −0.11 ± 1.69 (3.23) | 4.78 ± 0.67 | 4.22 ± 0.67 | 0.56 ± 0.88 (11.63) | |
| Does the device stop reliably as intended? | 3.67 ± 1.00 | 3.44 ± 0.88 | 0.22 ± 1.20 (6.06) | 4.89 ± 0.33 | 4.56 ± 0.53 | 0.33 ± 0.50 (6.82) | |
| Is it easy to wear or attach the relevant components? | 4.00 ± 1.12 | 4.11 ± 0.93 | −0.11 ± 1.45 (2.78) | 4.78 ± 0.44 | 4.67 ± 0.50 | 0.11 ± 0.60 (2.33) | |
| Can the device be properly adjusted to fit the user’s body? | 4.00 ± 0.87 | 4.00 ± 1.32 | 0.00 ± 1.50 (0.00) | 5.00 ± 0.00 | 4.56 ± 0.53 | 0.44 ± 0.53 (8.89) * | |
| Operability and functionality average | 3.87 ± 1.02 | 3.84 ± 1.02 | 0.03 ± 1.24 (0.82) | 4.83 ± 0.55 | 4.33 ± 0.76 | 0.49 ± 0.91 (10.20) * | |
| C | Does the device effectively assist with walking? | 4.89 ± 0.33 | 4.22 ± 0.83 | 0.67 ± 1.00 (13.64) | 5.00 ± 0.00 | 4.67 ± 0.50 | 0.33 ± 0.50 (6.67) |
| Are the weight and size of the device appropriate? | 3.78 ± 1.09 | 3.56 ± 1.24 | 0.22 ± 1.48 (5.88) | 4.89 ± 0.33 | 4.67 ± 0.50 | 0.22 ± 0.67 (4.55) | |
| Is there no discomfort caused by noise during walking? | 3.67 ± 1.22 | 3.56 ± 1.24 | 0.11 ± 1.69 (3.03) | 4.78 ± 0.44 | 4.78 ± 0.44 | 0.00 ± 0.71 (0.00) | |
| Is the operation method intuitive and aligned with user expectations? | 3.67 ± 1.12 | 3.33 ± 0.87 | 0.33 ± 1.50 (9.09) | 4.89 ± 0.33 | 4.33 ± 0.71 | 0.56 ± 0.73 (11.36) | |
| Are the legs comfortable when walking with the device attached? | 4.11 ± 0.78 | 3.89 ± 1.05 | 0.22 ± 0.83 (5.41) | 4.67 ± 1.00 | 4.11 ± 1.05 | 0.56 ± 0.73 (11.90) | |
| Are the arms comfortable when walking with the device attached? | 3.89 ± 1.05 | 3.56 ± 1.33 | 0.33 ± 1.12 (8.57) | 5.00 ± 0.00 | 4.44 ± 0.73 | 0.56 ± 0.73 (11.11) | |
| Is the torso comfortable when walking with the device attached? | 3.89 ± 0.78 | 3.67 ± 1.00 | 0.22 ± 0.97 (5.71) | 4.89 ± 0.33 | 4.44 ± 0.73 | 0.44 ± 0.73 (9.09) | |
| Convenience average | 3.98 ± 0.99 | 3.68 ± 1.08 | 0.30 ± 1.21 (7.57) | 4.87 ± 0.46 | 4.49 ± 0.69 | 0.38 ± 0.68 (7.82) * | |
| Categories | Physical Therapists (n = 9) | Stroke (n = 9) |
|---|---|---|
| Safety | -The drive unit poses a potential risk of foot entrapment during ambulation. | -The absence of handles induces a sense of instability during walking;-The actuator exhibits delayed responsiveness in tracking user movement. |
| Operability and Functionality | -A latency exists between user motion detection and actuator tracking. | -Motion detection sensitivity is low, yielding delays during directional changes and stopping;-The device operation is not intuitive and requires improvement. |
| Convenience | -The harness application procedure is complex and lacks ease of use. | -The harness is uncomfortable, particularly due to the thigh straps, which interfere with natural movement. |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hwang, D.; Choi, E.; Cho, K. Usability Test for an Over-Ground Walking Assistance Robotic Device Based on the Mecanum Wheel. Appl. Sci. 2025, 15, 5294. https://doi.org/10.3390/app15105294
Hwang D, Choi E, Cho K. Usability Test for an Over-Ground Walking Assistance Robotic Device Based on the Mecanum Wheel. Applied Sciences. 2025; 15(10):5294. https://doi.org/10.3390/app15105294
Chicago/Turabian StyleHwang, Daon, EunPyeong Choi, and KiHun Cho. 2025. "Usability Test for an Over-Ground Walking Assistance Robotic Device Based on the Mecanum Wheel" Applied Sciences 15, no. 10: 5294. https://doi.org/10.3390/app15105294
APA StyleHwang, D., Choi, E., & Cho, K. (2025). Usability Test for an Over-Ground Walking Assistance Robotic Device Based on the Mecanum Wheel. Applied Sciences, 15(10), 5294. https://doi.org/10.3390/app15105294