
Theoretical and Simulation Study of Suction Force in Wall-Climbing Cleaning Robots with Negative Pressure Adsorption


Abstract
1. Introduction
2. Structural Design and Methods
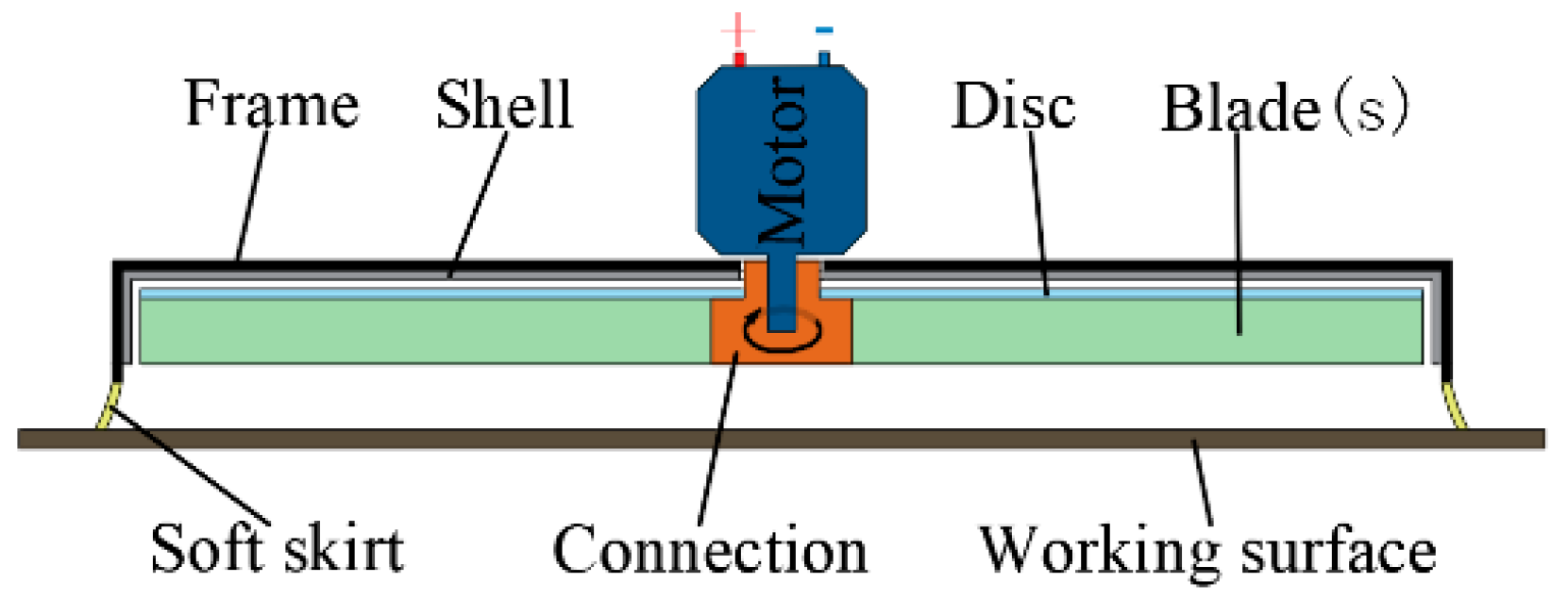
2.1. Structural Design
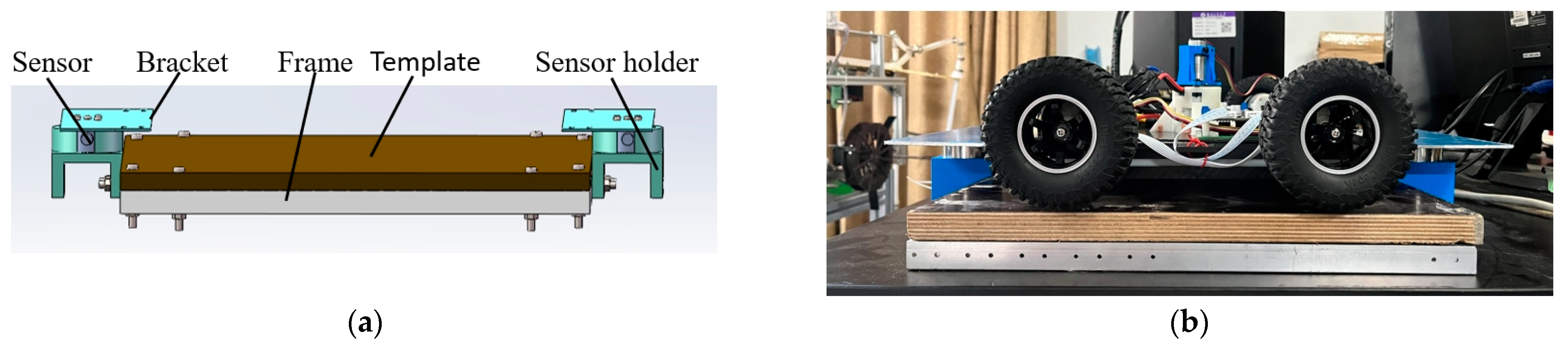
2.2. Apparatus and Method for Measuring Adhesion Force
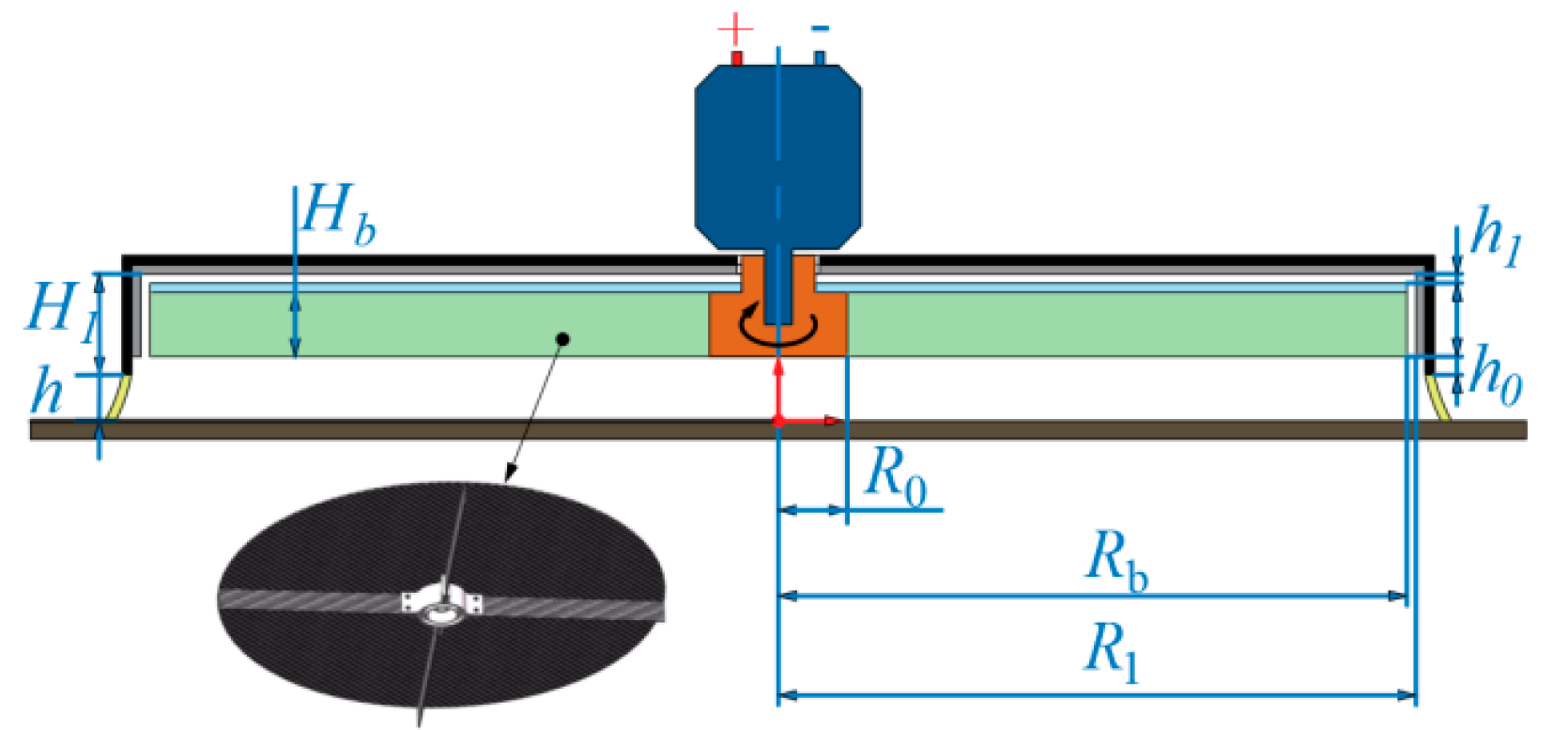
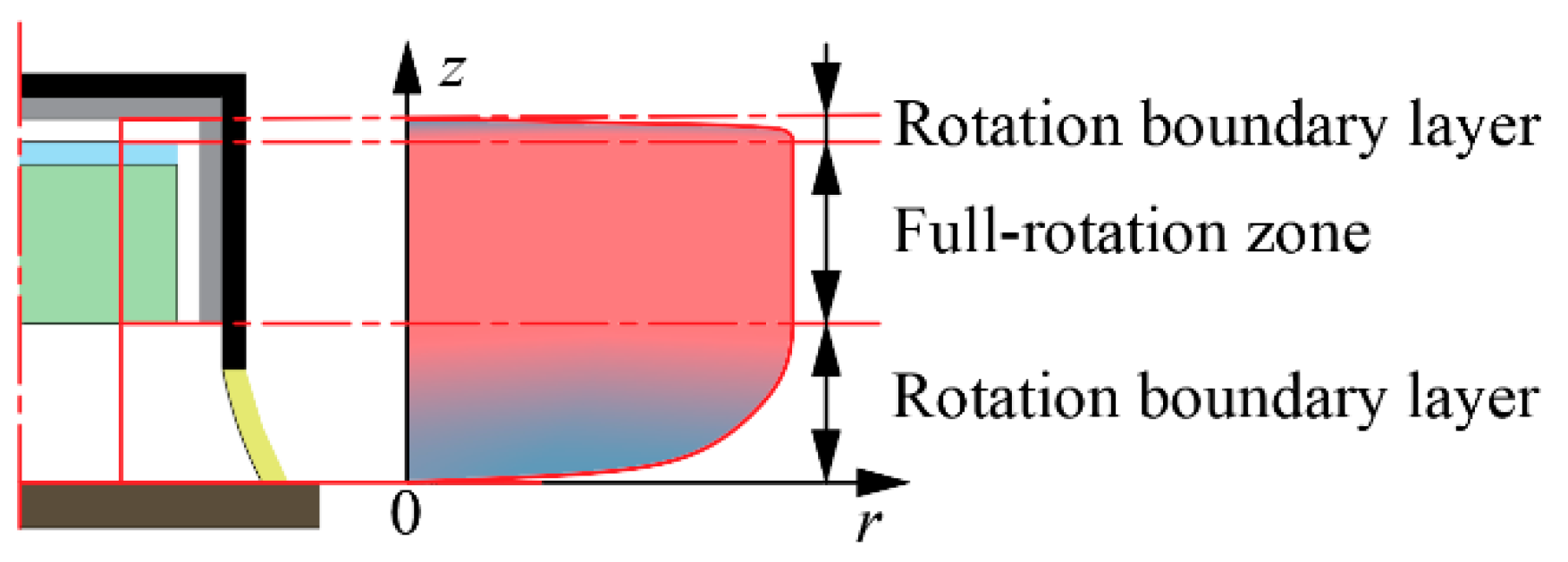
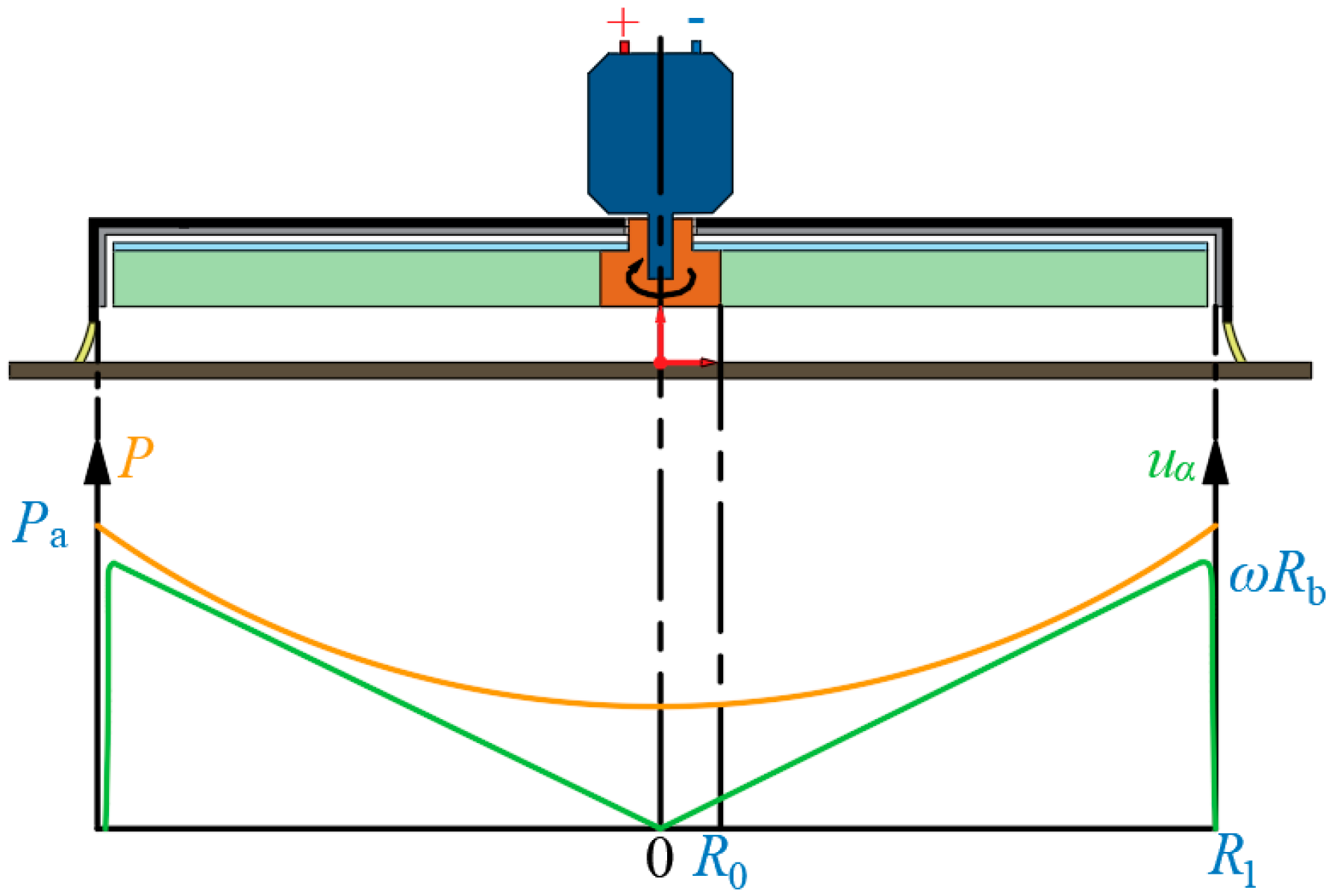
3. Theoretical Modeling
- The continuum assumption, which posits that a fluid is composed of a continuous distribution of fluid particles.
- The incompressible flow assumption, which holds when the Mach number is within the range of 0–0.3, and the density and temperature of the airflow within the adhesion chamber are considered constants. The maximum Mach number in this suction unit is 0.22.
- Only the tangential air velocity generated by the fan rotation is considered, with the vertical and radial air velocities being neglected.
4. Results
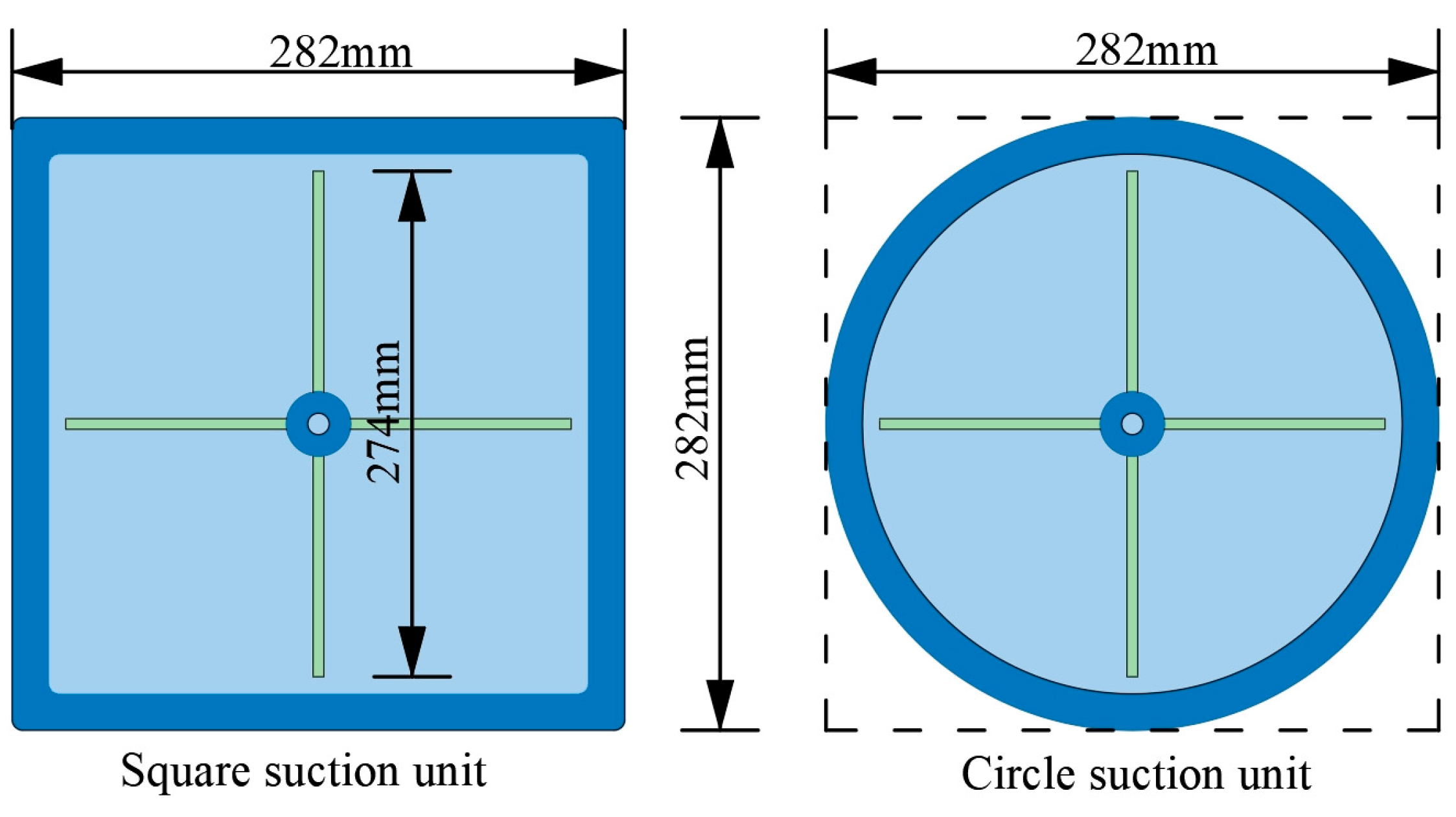
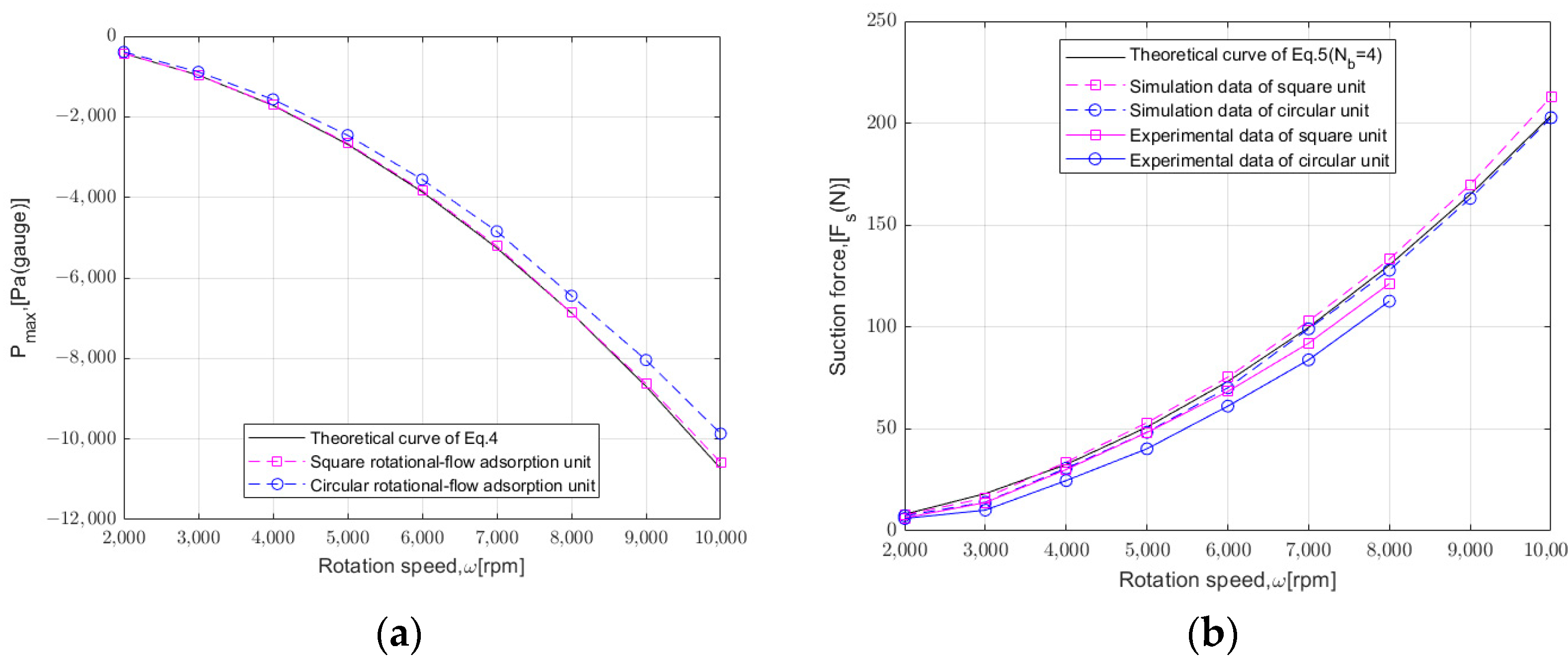
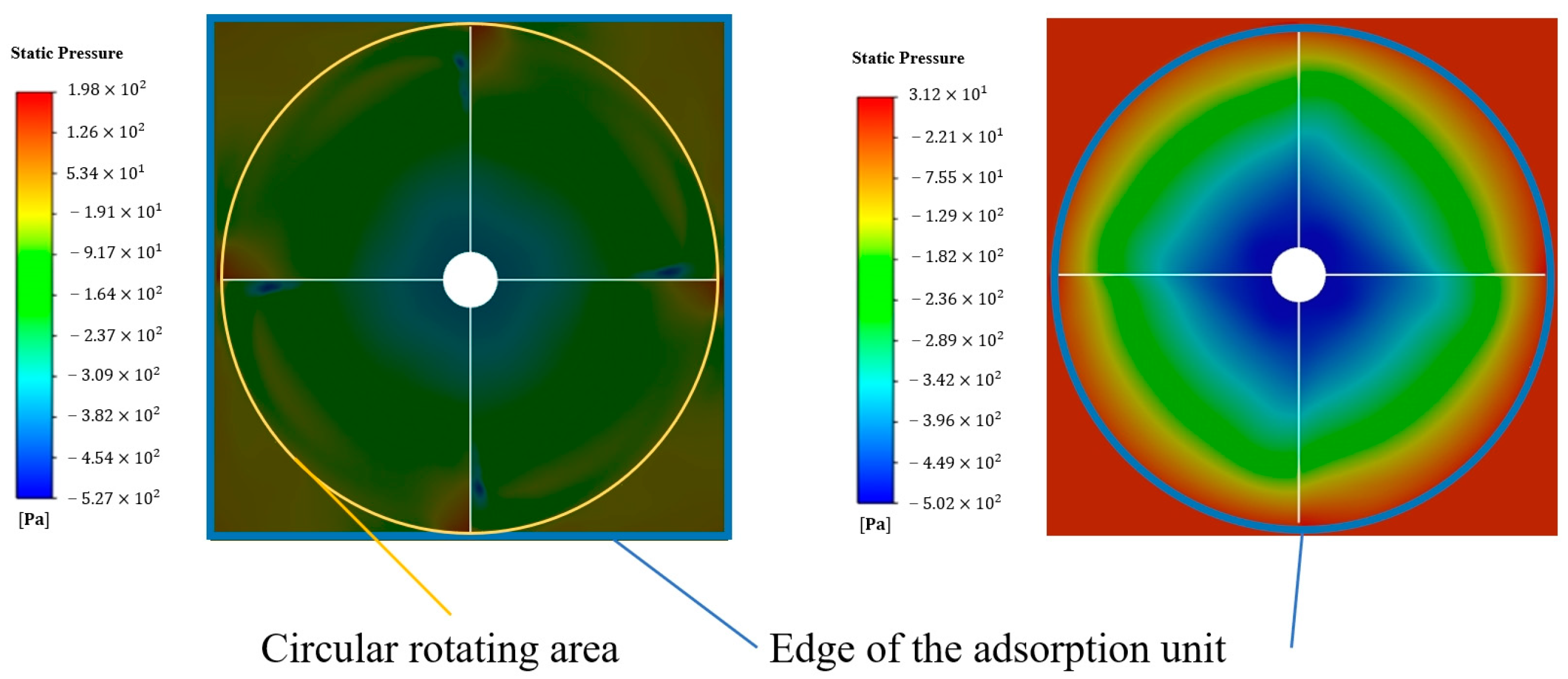
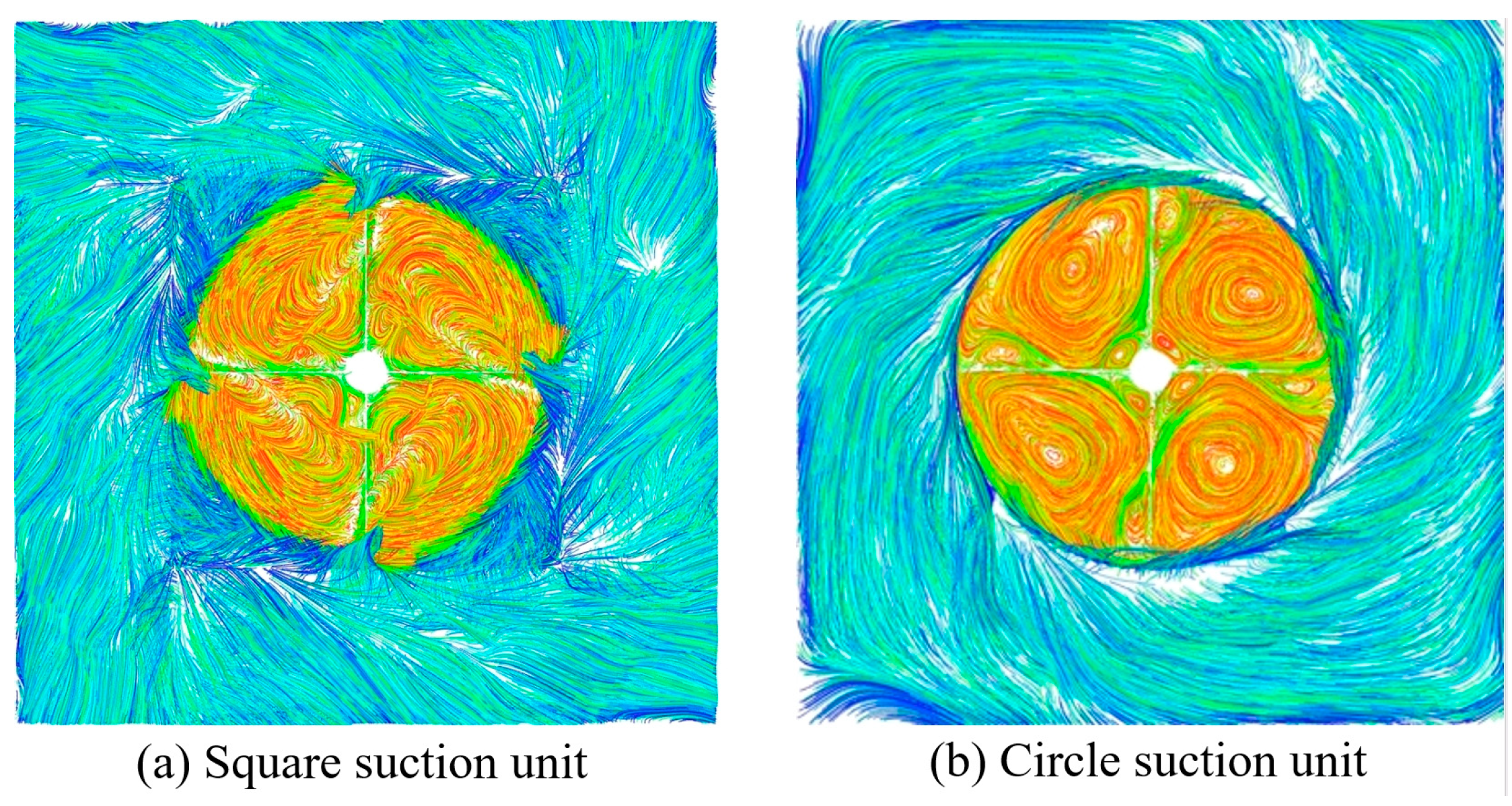
4.1. Comparison of Square and Circular Suction Units
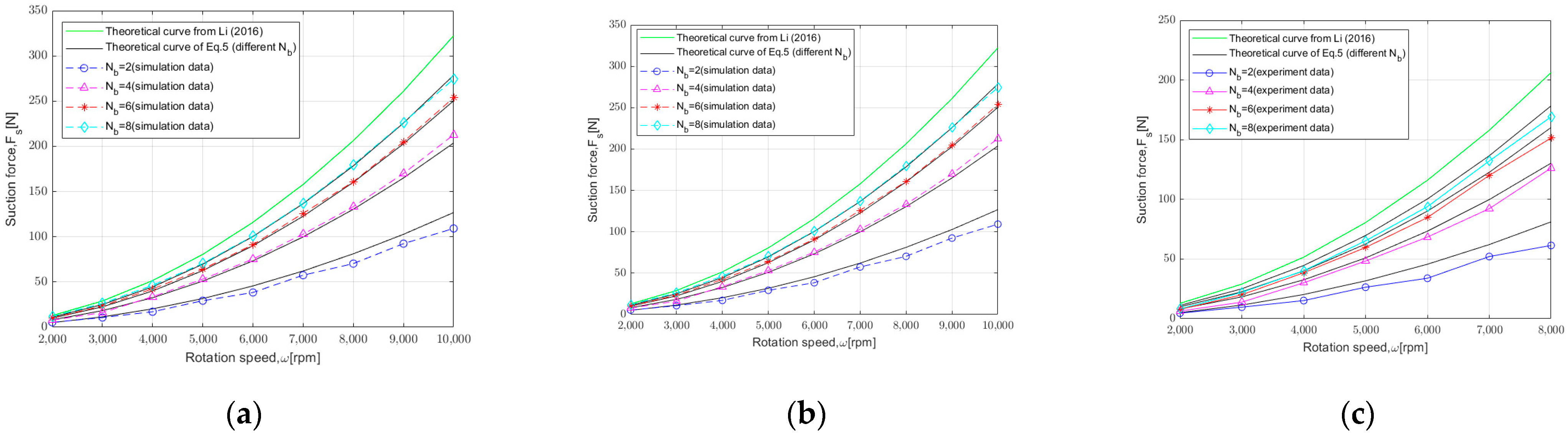
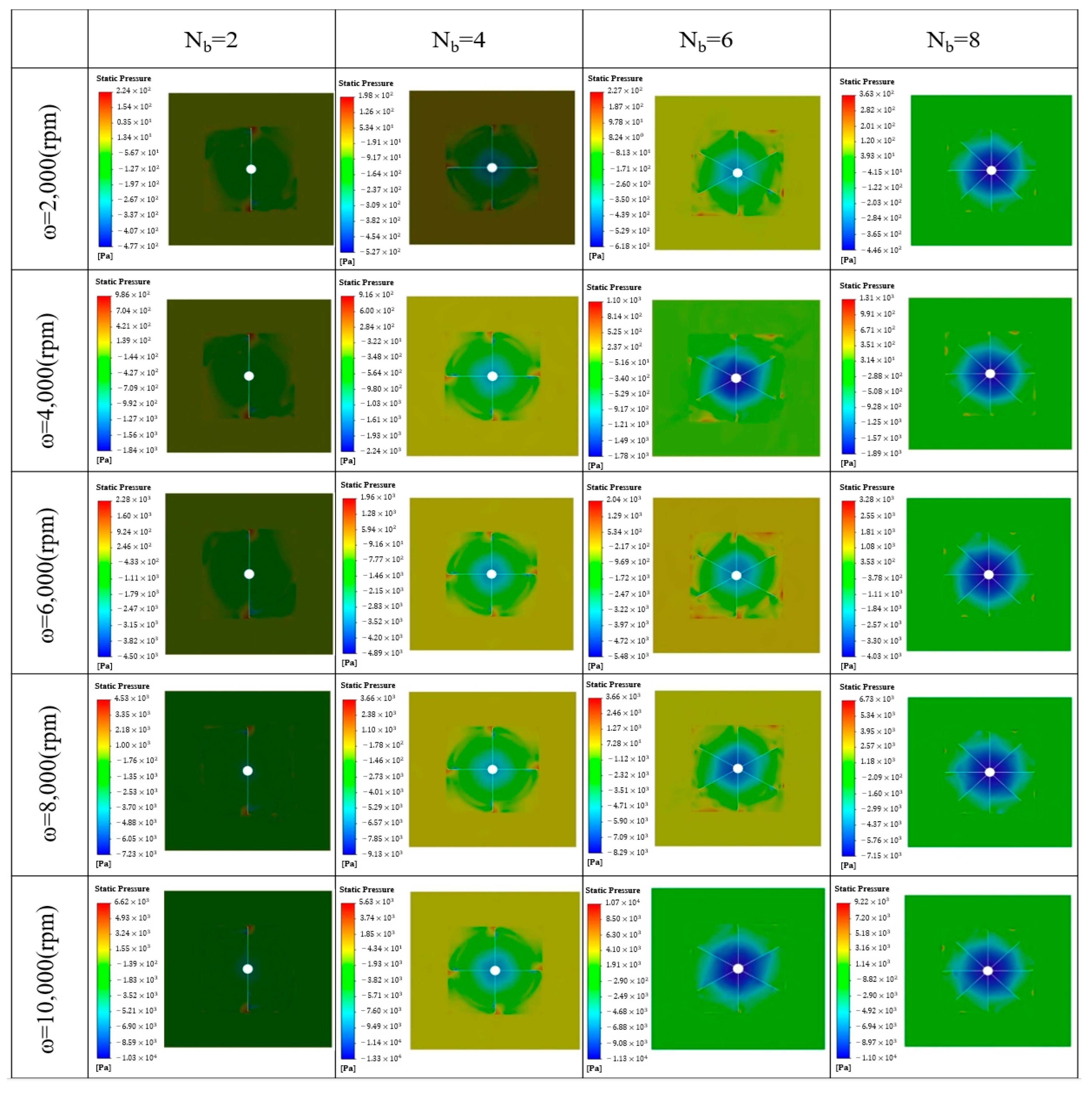
4.2. The Effect of Blade Quantity on Adsorption
4.3. The Impact of Blade Thickness on Adsorption
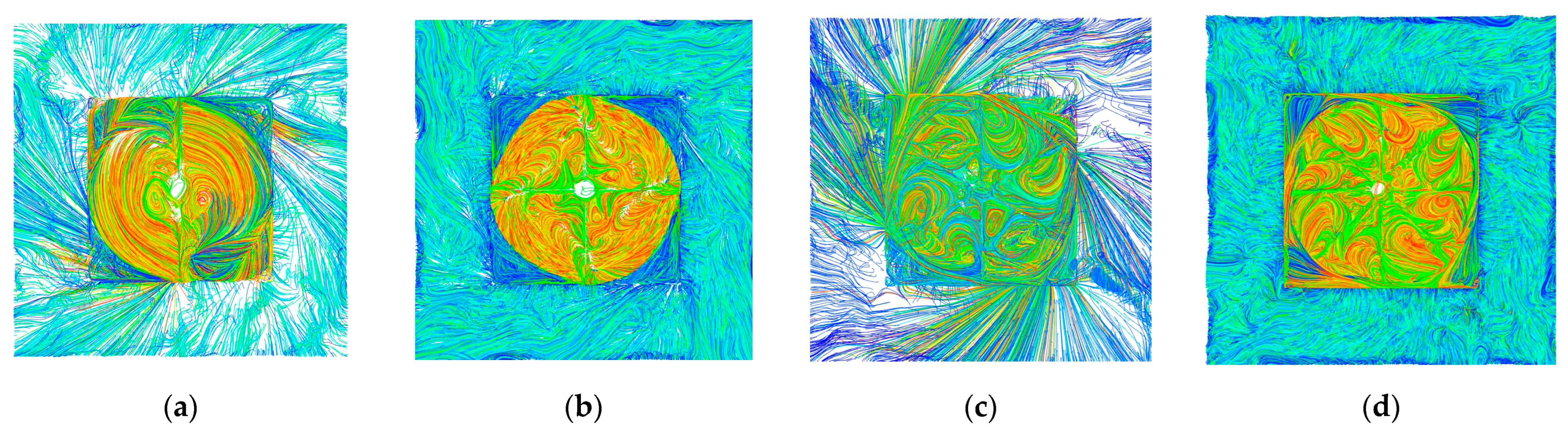
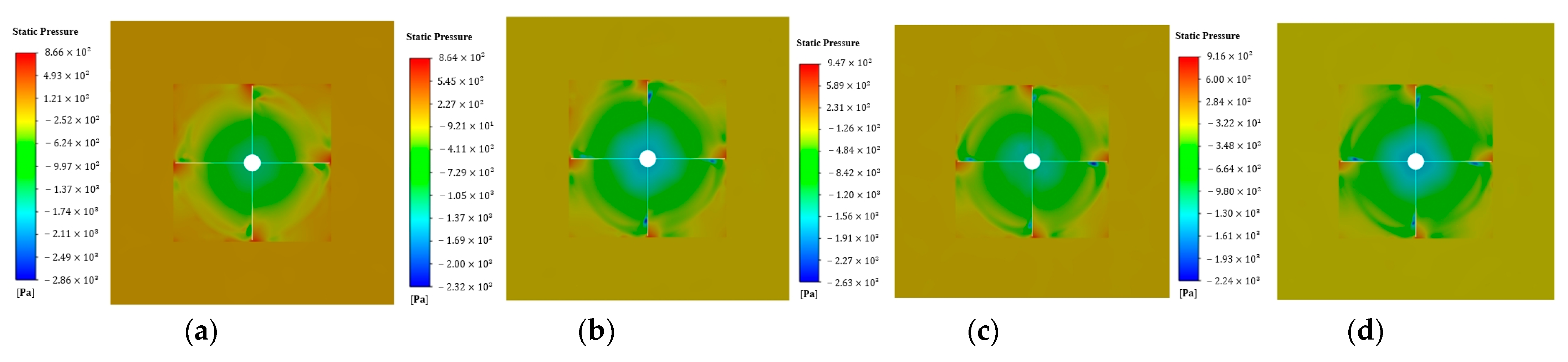
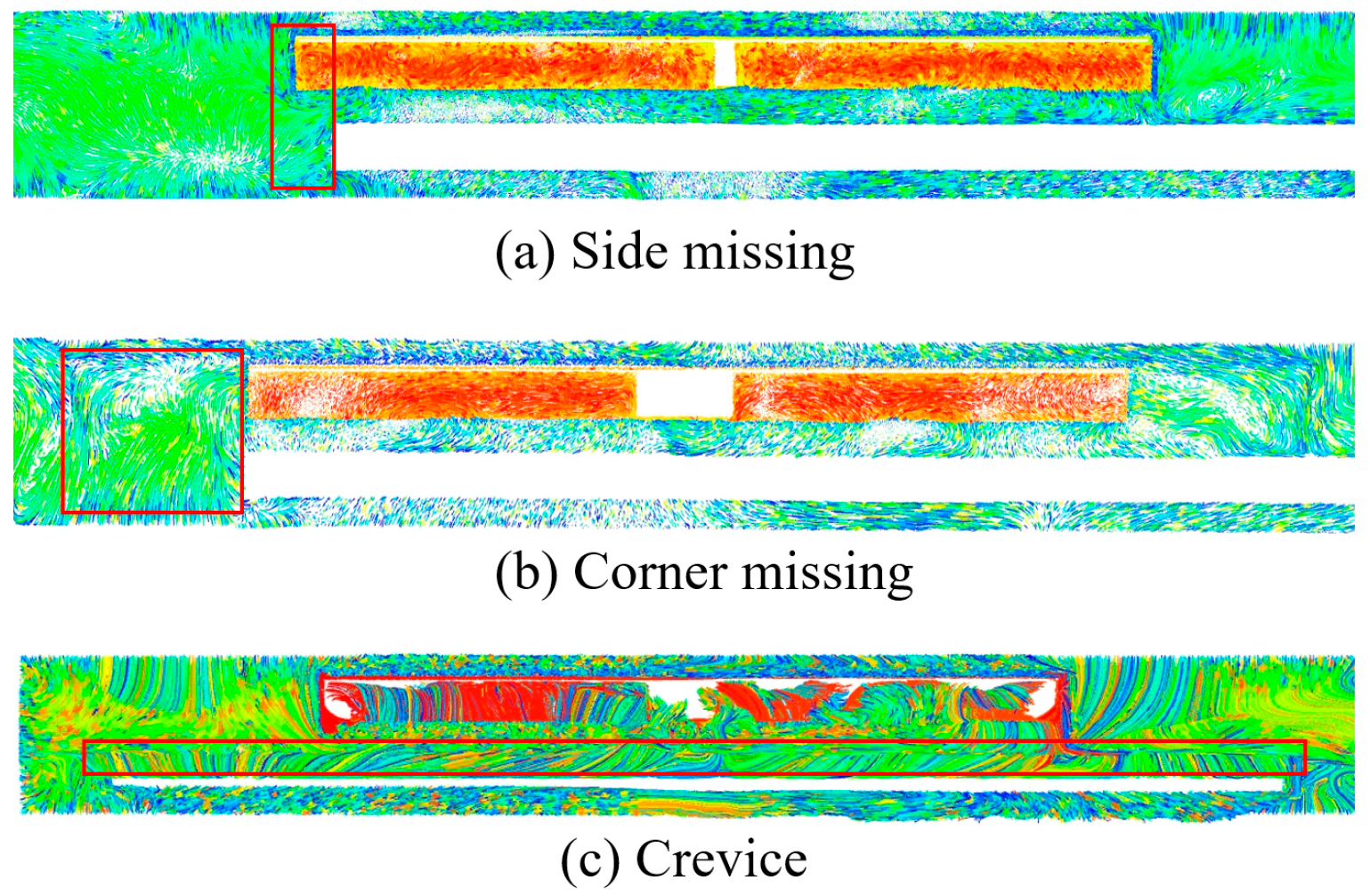
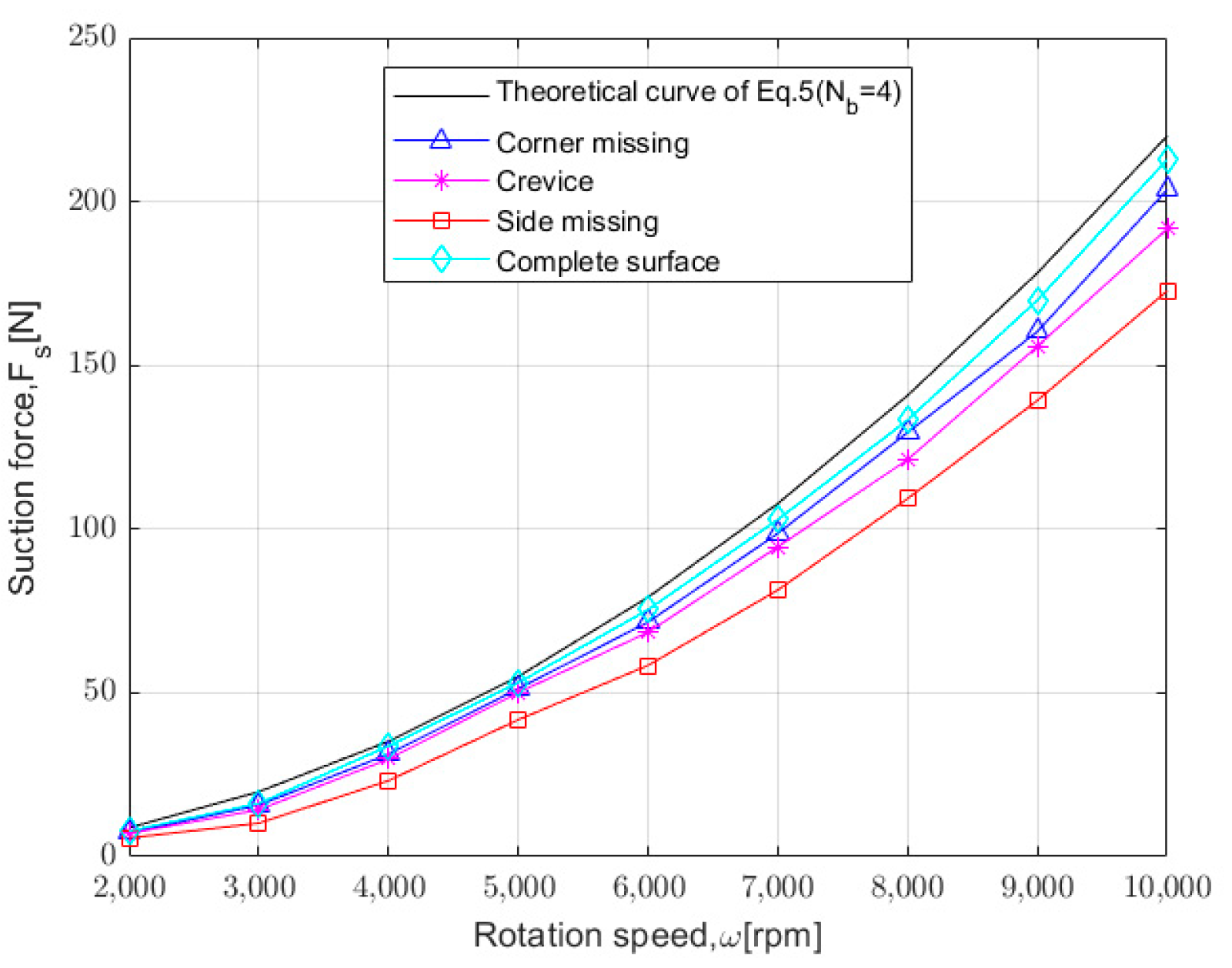
4.4. The Impact of Leakage Zones on Adsorption
5. Conclusions
- (1)
- Compared to circular suction units, square suction units provide greater suction force for two main reasons: a larger adhesion area and reduced loss of the internal pressure gradient.
- (2)
- An increase in the number of blades improves the distribution of nonlinear velocity in the z-plane. Suction force increases significantly with the number of blades up to a certain point, after which further improvements are minimal. In practical applications, four or six blades are appropriate.
- (3)
- As the number of blades increases, the thickness of the blades primarily affects the air volume in the rotating domain, influencing suction force; thinner blades are preferable.
- (4)
- This paper analyzes three dangerous working conditions that the wall-climbing cleaning robot may encounter, with edge leakage being the most dangerous, followed by corner leakage, and gap leakage having the least impact.
6. Future Work
- (1)
- The design of wall-climbing cleaning robots requires further refinement, including balancing the load (cleaning equipment) with cleaning effectiveness, developing more efficient mobility strategies, and achieving lightweight and low-noise operation.
- (2)
- This study found that the internal airflow in the square suction unit is more turbulent, particularly near the blades, which negatively impacts adhesion. Optimizing blade design and the internal structure of the square suction unit to enhance the integrity of the rotating airflow is a promising area for further research.
- (3)
- A comprehensive and systematic analysis should be conducted, considering factors such as the mechanics, kinematics, and motor power of the wall-climbing robot on the wall surface.
- (4)
- The most critical issue for negative pressure adhesion is vacuum leakage. Further investigation into the anti-leakage theory of suction units and the development of safety measures to mitigate leakage are essential.
- (5)
- Overcoming obstacles is a critical function of wall-climbing robots. The impact of protruding obstacles on wall-climbing robots, as well as the influence of the internal flow field of the suction unit, are important areas for further investigation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nansai, S.; Mohan, R.E. A Survey of Wall Climbing Robots: Recent Advances and Challenges. Robotics 2016, 5, 14. [Google Scholar] [CrossRef]
- Schmidt, D.; Berns, K. Climbing robots for maintenance and inspections of vertical structures—A survey of design aspects and technologies. Robot. Auton. Syst. 2013, 61, 1288–1305. [Google Scholar] [CrossRef]
- Seo, T.; Jeon, Y.; Park, C.; Kim, J. Survey on Glass And Façade-Cleaning Robots: Climbing Mechanisms, Cleaning Methods, and Applications. Int. J. Precis Eng. Manuf.-Green Technol. 2019, 6, 367–376. [Google Scholar] [CrossRef]
- Akinfiev, T.; Armada, M.; Nabulsi, S. Climbing cleaning robot for vertical surfaces. Ind. Robot Int. J. 2009, 36, 352–357. [Google Scholar] [CrossRef]
- Shen, W.; Gu, J.; Shen, Y. Permanent magnetic system design for the wall-climbing robot. In Proceedings of the IEEE International Conference Mechatronics and Automation, Niagara Falls, ON, Canada, 29 July–1 August 2005. [Google Scholar]
- Faruq Howlader, M.D.O.; Sattar, T.P. Design and Optimization of Permanent Magnet Based Adhesion Module for Robots Climbing on Reinforced Concrete Surfaces. In Intelligent Systems and Applications: Extended and Selected Results from the SAI Intelligent Systems Conference (IntelliSys) 2015; Bi, Y., Kapoor, S., Bhatia, R., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 153–171. [Google Scholar]
- Gao, F.; Fan, J.; Zhang, L.; Jiang, J.; He, S. Magnetic crawler climbing detection robot basing on metal magnetic memory testing technology. Robot. Auton. Syst. 2020, 125, 103439. [Google Scholar] [CrossRef]
- Akinfiev, T.; Armada, M.; Prieto, M.; Uquillas, M. Concerning a Technique for Increasing Stability of Climbing Robots. J. Intell. Robot. Syst. 2000, 27, 195–209. [Google Scholar] [CrossRef]
- Griffiths, G.; Studley, M. Wall Climbing Robots Using Electro-Adhesion Technology. In Field Robotics; World Scientific: Singapore, 2011; pp. 381–387. [Google Scholar]
- Mao, J.; Qin, L.; Zhang, W.; Xie, L.; Wang, Y. Modeling and analysis of electrostatic adhesion force for climbing robot on dielectric wall materials. Eur. Phys. J. Appl. Phys. 2015, 69, 11003. [Google Scholar] [CrossRef]
- Guo, J.; Justham, L.; Jackson, M.; Parkin, R. A Concept Selection Method for Designing Climbing Robots. Key Eng. Mater. 2015, 649, 22–29. [Google Scholar]
- Takahashi, K.; Hasegawa, T.; Yuta, S. Flexible Electrostatic Adhesive Device and Its Performance Evaluations. In Proceedings of the 2019 IEEE/SICE International Symposium on System Integration (SII), Paris, France, 14–16 January 2019. [Google Scholar]
- Liu, Y.; Sun, S.; Wu, X.; Mei, T. A Wheeled Wall-Climbing Robot with Bio-Inspired Spine Mechanisms. J. Bionic Eng. 2015, 12, 17–28. [Google Scholar] [CrossRef]
- Chen, R.; Fu, L.; Qiu, Y.; Song, R.; Jin, Y. A gecko-inspired wall-climbing robot based on vibration suction mechanism. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2019, 233, 7132–7143. [Google Scholar] [CrossRef]
- Wang, W.; Wu, S. A caterpillar climbing robot with spine claws and compliant structural modules. Robotica 2016, 34, 1553–1565. [Google Scholar] [CrossRef]
- Dharmawan, A.G.; Xavier, P.; Anderson, D.; Perez, K.B.; Hariri, H.H.; Soh, G.S.; Baji, A.; Bouffanais, R.; Foong, S.; Low, H.Y.; et al. A Bio-Inspired Miniature Climbing Robot with Bilayer Dry Adhesives: Design, Modeling, and Experimentation. In Proceedings of the ASME 2018 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Quebec City, QC, Canada, 26–29 August 2018. [Google Scholar]
- Liang, P.; Gao, X.; Zhang, Q.; Gao, R.; Li, M.; Xu, Y.; Zhu, W. Design and Stability Analysis of a Wall-Climbing Robot Using Propulsive Force of Propeller. Symmetry 2020, 13, 37. [Google Scholar] [CrossRef]
- Shin, J.U.; Kim, D.; Kim, J.H.; Myung, H. Micro aerial vehicle type wall-climbing robot mechanism. In Proceedings of the 2013 IEEE RO-MAN, Gyeongju, Republic of Korea, 26–29 August 2013. [Google Scholar]
- Kawasaki, K.; Motegi, Y.; Zhao, M.; Okada, K.; Inaba, M. Dual connected Bi-Copter with new wall trace locomotion feasibility that can fly at arbitrary tilt angle. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–2 October 2015. [Google Scholar]
- Alkalla, M.; Fanni, M.; Mohamed, A.; Hashimoto, S.; Sawada, H.; Miwa, T.; Hamed, A. EJBot-II: An optimized skid-steering propeller-type climbing robot with transition mechanism. Adv. Robot. 2019, 33, 1042–1059. [Google Scholar] [CrossRef]
- Dong, W.G.; Wang, H.G.; Liu, A.H.; Li, Z.H. Design and Analysis of a Novel Wall-climbing Robot Mechanism. Adv. Eng. Forum 2011, 2, 346–351. [Google Scholar]
- Liu, J.; Xu, L.; Chen, S.; Xu, H.; Cheng, G.; Xu, J. Development of a Bio-inspired Wall-Climbing Robot Composed of Spine Wheels, Adhesive Belts and Eddy Suction Cup. Robotica 2021, 39, 3–22. [Google Scholar] [CrossRef]
- Liu, J.; Xu, L.; Xu, J.; Liu, L.; Cheng, G.; Chen, S.; Xu, H.; Shi, J.; Liang, X. Analysis and optimization of the wall-climbing robot with an adsorption system and adhesive belts. Int. J. Adv. Robot. Syst. 2020, 17, 1738083785. [Google Scholar] [CrossRef]
- Andriani, N.; Maulida, M.D.; Alfafa, M.F. Pressure control of a wheeled wall climbing robot using proporsional controller. In Proceedings of the 2016 International Conference on Information & Communication Technology and Systems (ICTS), Surabaya, Indonesia, 12 October 2016. [Google Scholar]
- Nishi, A.; Wakasugi, Y.; Watanabe, K. Design of a robot capable of moving on a vertical wall. Adv. Robot. 1986, 1, 33–45. [Google Scholar] [CrossRef]
- Kim, H.; Kim, D.; Yang, H.; Lee, K.; Seo, K. A wall climbing robot with vacuum caterpillar wheel system operated by mechanical valve. In Proceedings of the 9th International Conference on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Brussels, Belgium, 12–14 September 2006. [Google Scholar]
- Miyake, T.; Ishihara, H.; Tomino, T. Vacuum-based wet adhesion system for wall climbing robots -Lubricating action and seal action by the liquid. In Proceedings of the 2008 IEEE International Conference on Robotics and Biomimetics, Bangkok, Thailand, 22–25 February 2009. [Google Scholar]
- Koo, I.M.; Trong, T.D.; Lee, Y.H.; Moon, H.; Koo, J.; Park, S.K.; Choi, H.R. Development of Wall Climbing Robot System by Using Impeller Type Adhesion Mechanism. J. Intell. Robot. Syst. 2013, 72, 57–72. [Google Scholar] [CrossRef]
- Shi, K.; Li, X. Vacuum suction unit based on the zero pressure difference method. Phys. Fluids 2020, 32, 17104. [Google Scholar] [CrossRef]
- Li, X.; Dong, L. Development and Analysis of an Electrically Activated Sucker for Handling Workpieces With Rough and Uneven Surfaces. IEEE/ASME Trans. Mechatron. 2016, 21, 1024–1034. [Google Scholar] [CrossRef]
- Zhou, Q.; Li, X. Experimental investigation on climbing robot using rotation-flow adsorption unit. Robot. Auton. Syst. 2018, 105, 112–120. [Google Scholar] [CrossRef]
- Chen, N.; Shi, K.; Li, X. Theoretical and Experimental Study and Design Method of Blade Height of a Rotational-Flow Suction Unit in a Wall-Climbing Robot. J. Mech. Robot. 2020, 12, 045002. [Google Scholar] [CrossRef]
- Shi, K.; Li, X. Efficiency Improvement of Electrically Activated Rotation-Flow Suction Unit Based on Drag Torque and Suction Force Modeling. IEEE/ASME Trans. Mechatron. 2020, 25, 882–893. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Adsorption Method | Application Scenario | Advantages | Disadvantages | |
|---|---|---|---|---|
| Magnetic attraction | Permanent magnets | Magnetic wall | Strong adsorption Simple structure | Only applicable to the magnetic wall |
| Solenoid | ||||
| Negative pressure adsorption | Suction cups | Smooth flat wall | Strong adsorption | High Sealing Requirements Complex structure |
| Rotational-flow adsorption unit | Wide range of applications | Moderate adsorption | Louder noise High power consumption | |
| Propeller thrust adsorption | Wide range of applications | High maneuverability and safety | Inefficient Noisy Susceptible to external influences | |
| Bionic adsorption | Rheum | Clean smooth wall | No need for extra power Lightweight Low noise | Limited maneuverability Complicated design Elevated costs Reduced load-bearing capacity |
| The van der Waals forces | ||||
| Claws and thorns | Rough wall | |||
| Electrostatic adhesion | Wide range of applications | Simple structure Low energy consumption Lightweight | Slow-moving speed Low load capacity Low load carrying capacity | |
| Hybrid adsorption | Wide range of applications | Integrating the advantages of different adsorption methods | Complex structure Complex control | |
| Symbol | Quantity | SI Unit |
|---|---|---|
| Fs | Suction force | N |
| g | Gravitational acceleration | m/s2 |
| G | Gravitational force | N |
| ρ | Air density | kg/m3 |
| h | Clearance between the surface and the suction unit | m |
| ω | Rotation speed | Rad/s |
| Hb | Height of blades | m |
| H1 | Height of the shell | m |
| R0 | The radius of the connector | m |
| Rb | The radius of the fan blade | m |
| R1 | Inner radius of the shell | m |
| Nb | The number of fan blades | |
| t | The thickness of the fan blades | m |
| Thicknesses/mm | a | b | c | d | e | |
|---|---|---|---|---|---|---|
| Air proportion | t = 1 | 98.4% | 98.0% | 97.5 | 97.1% | 90.5% |
| t = 10 | 94.7% | 90.5% | 86.3% | 82.2% | 27.9% | |
| Suction force/N | t = 1 | 5.4 | 7.8 | 10.2 | 11.9 | 14.5 |
| t = 10 | 3.8 | 8.1 | 9.4 | 10.3 | 5.6 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Yang, S.; Zhang, P.; Xu, C.; Li, B.; Li, Y. Theoretical and Simulation Study of Suction Force in Wall-Climbing Cleaning Robots with Negative Pressure Adsorption. Appl. Sci. 2025, 15, 80. https://doi.org/10.3390/app15010080
Zhang Z, Yang S, Zhang P, Xu C, Li B, Li Y. Theoretical and Simulation Study of Suction Force in Wall-Climbing Cleaning Robots with Negative Pressure Adsorption. Applied Sciences. 2025; 15(1):80. https://doi.org/10.3390/app15010080
Chicago/Turabian StyleZhang, Zheng, Shida Yang, Peixian Zhang, Chaobin Xu, Bazhou Li, and Yang Li. 2025. "Theoretical and Simulation Study of Suction Force in Wall-Climbing Cleaning Robots with Negative Pressure Adsorption" Applied Sciences 15, no. 1: 80. https://doi.org/10.3390/app15010080
APA StyleZhang, Z., Yang, S., Zhang, P., Xu, C., Li, B., & Li, Y. (2025). Theoretical and Simulation Study of Suction Force in Wall-Climbing Cleaning Robots with Negative Pressure Adsorption. Applied Sciences, 15(1), 80. https://doi.org/10.3390/app15010080