
Estimation of Wind Turbine Blade Icing Volume Based on Binocular Vision


Abstract
1. Introduction
2. Principle and Method
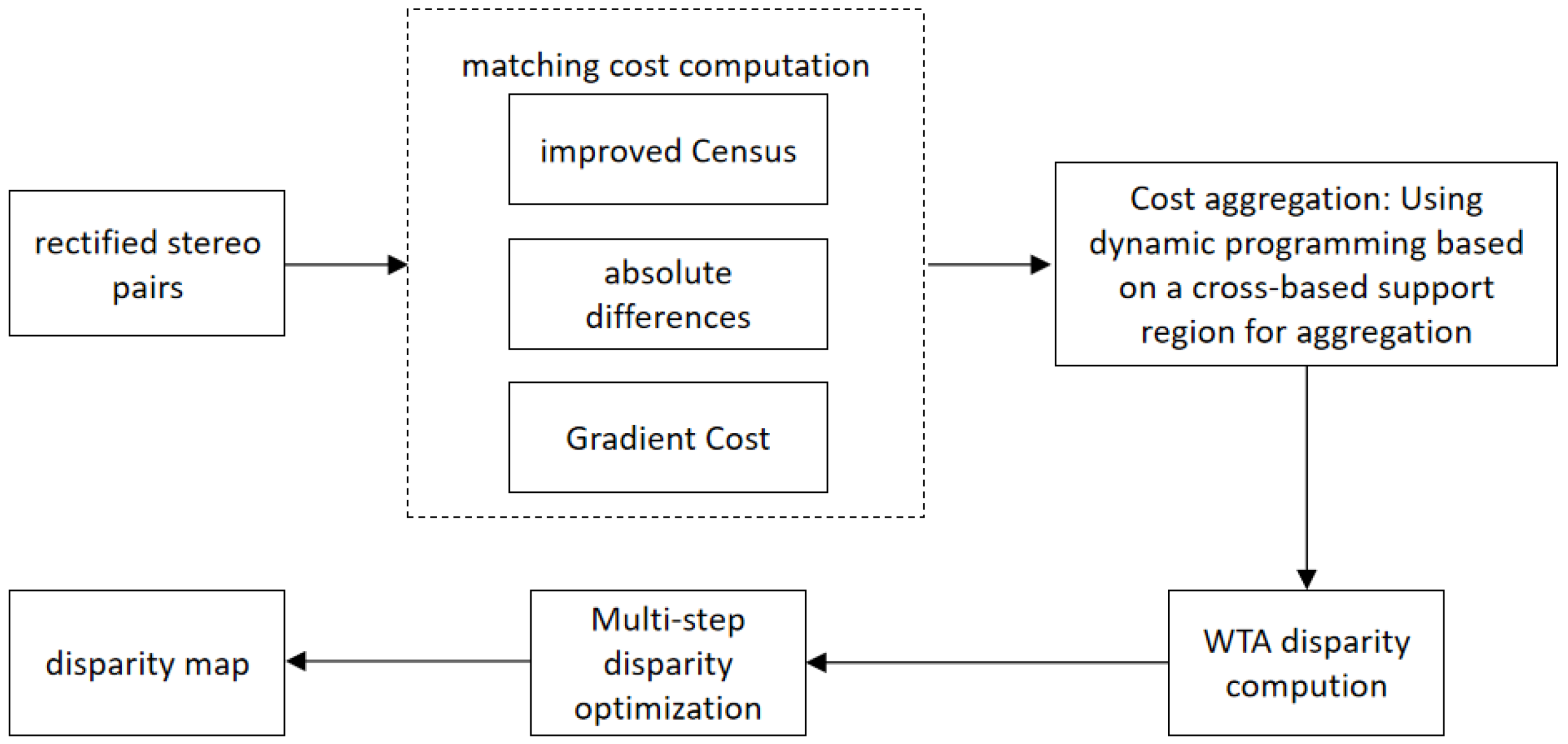
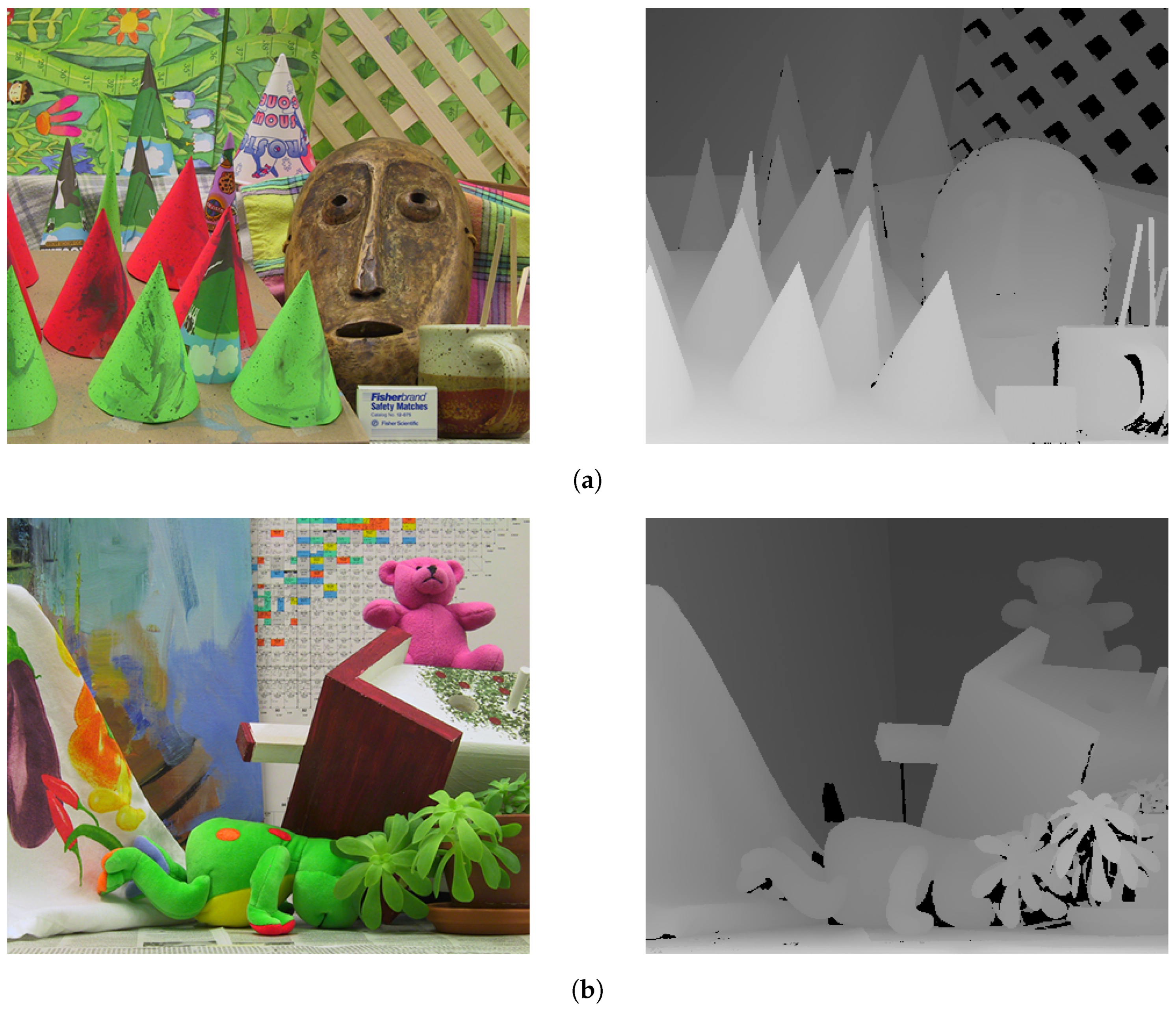
2.1. Stereo Matching
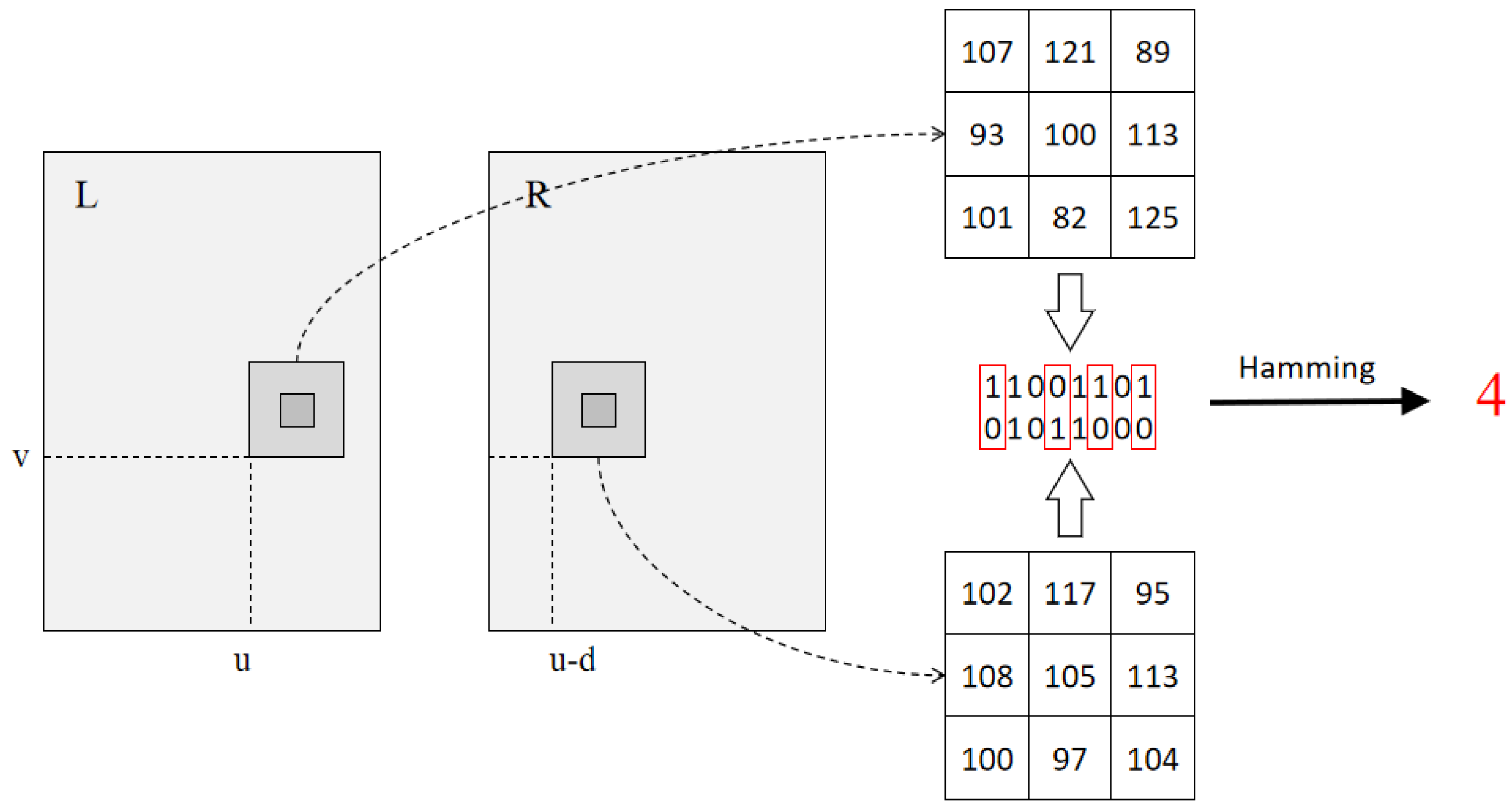
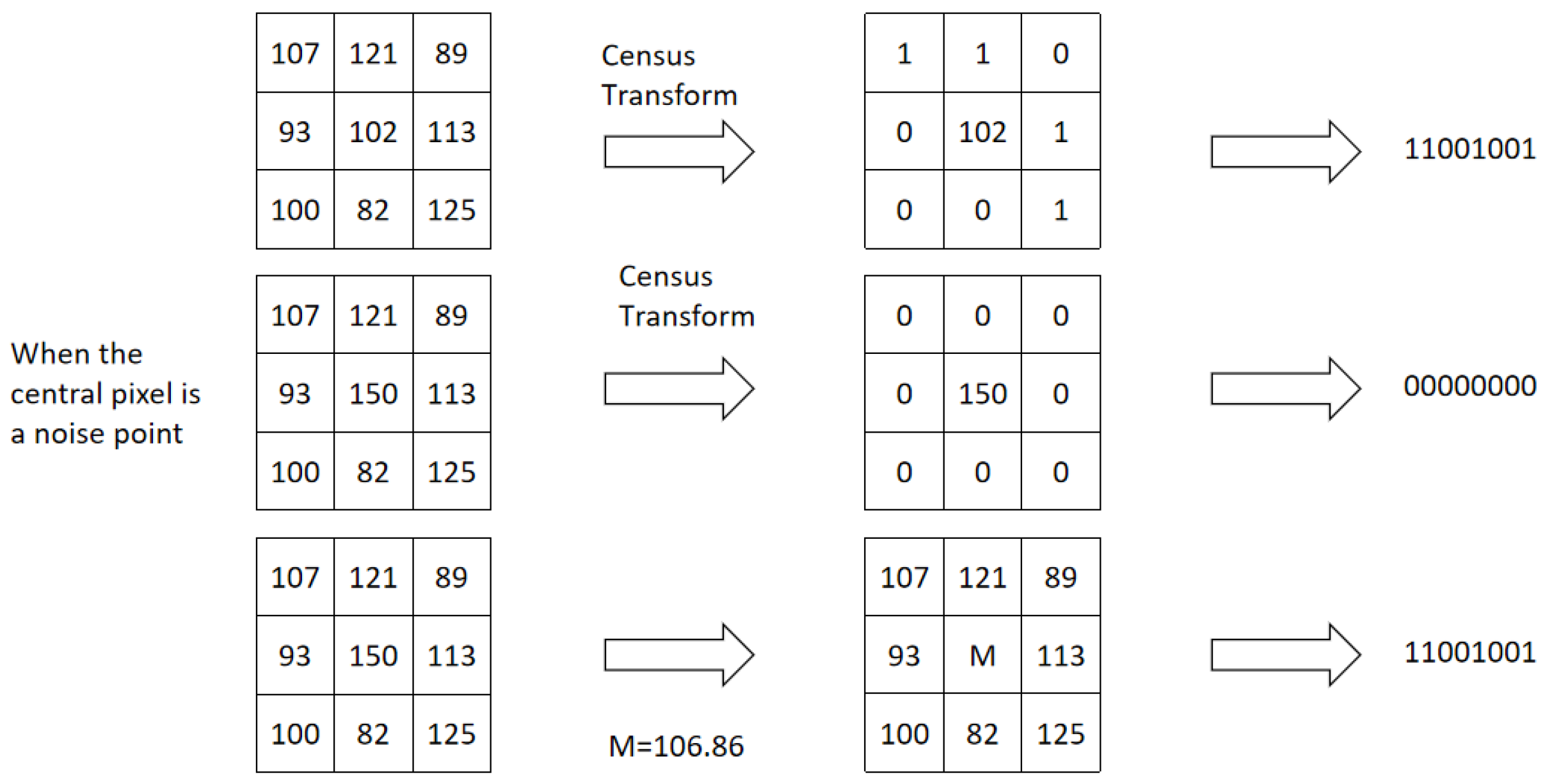
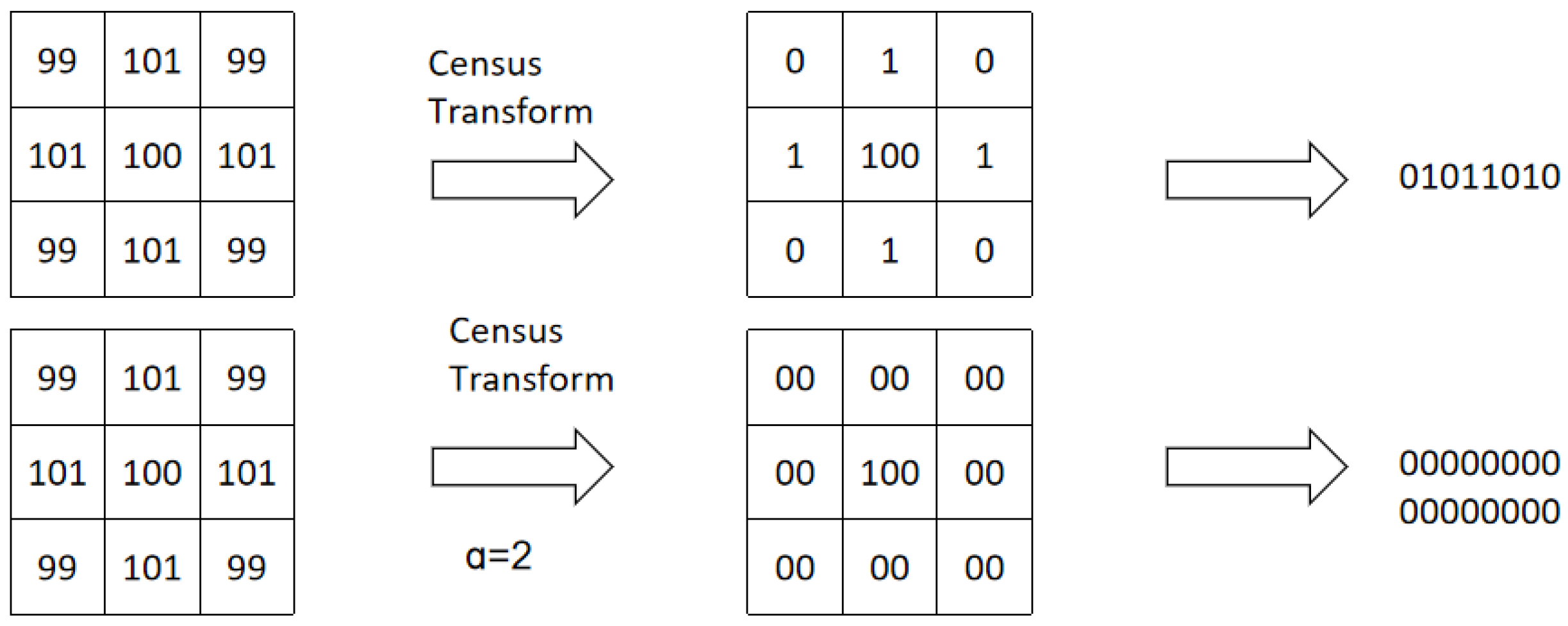
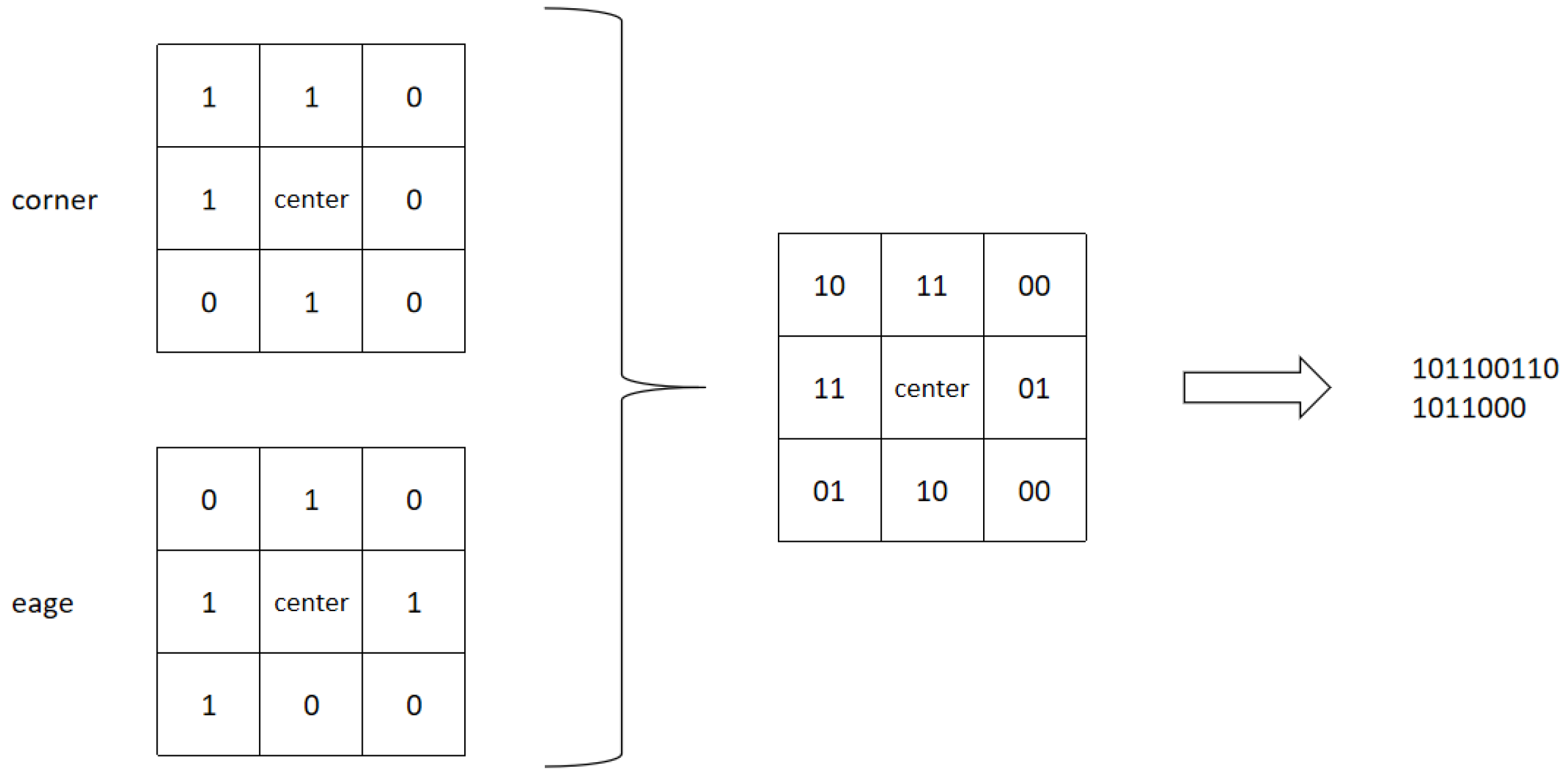
- Initial Cost Computation: The initial matching cost is obtained by combining an improved Census transform with gradient and color information.
- Cross-Based Cost Aggregation: We adopt the adaptive window method based on cross-based regions from reference [24] and introduce a unidirectional dynamic programming cost aggregation algorithm for cost aggregation.
- Disparity Computation: The initial disparity map is computed using the Winner-Take-All (WTA) method.
- Disparity Optimization: Multiple methods are employed to optimize the initial disparity map.
2.1.1. Matching Cost Calculation
2.1.2. Cross-Based Cost Aggregation
- and ;
- ;
- , when .
- , , if and ;
- , , if and ;
- , , if and ;
- , , if and .
2.1.3. Disparity Computation and Disparity Optimization
2.2. Volume Calculation
- 1.
- Sum of Heights and Unit Area Method
- 2.
- Trapezoidal Integration Method
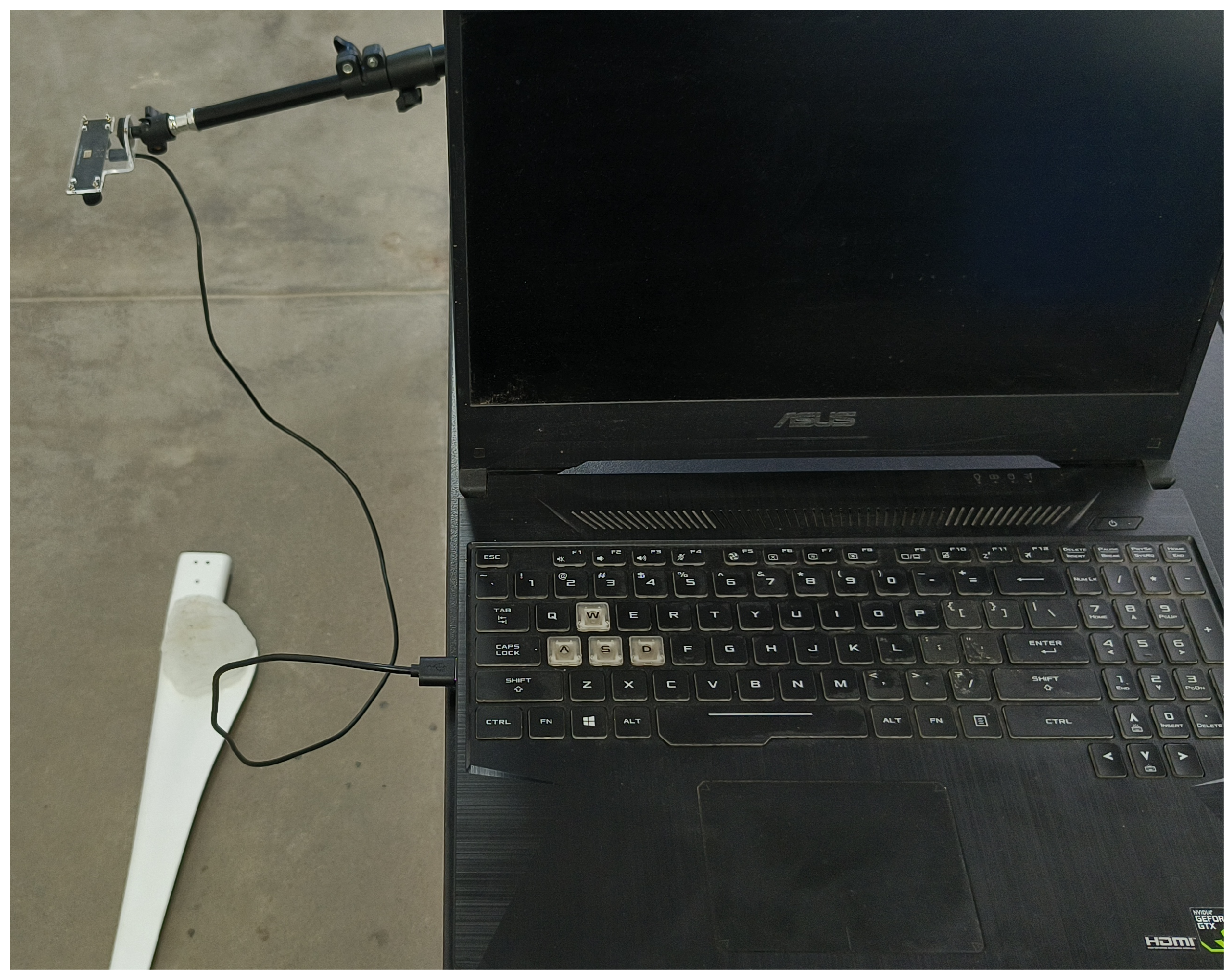
3. Experimental Design and Results Analysis
3.1. Noise Resistance Experiment
3.2. Volume Estimation Experiment of Regular-Shaped Ice Blocks
3.3. Simulation Experiment of Wind Turbine Blade Ice Accretion Volume Estimation
4. Conclusions
5. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yasmeen, R.; Zhang, X.; Sharif, A.; Shah, W.U.H.; Dincă, M.S. The role of wind energy towards sustainable development in top-16 wind energy consumer countries: Evidence from STIRPAT model. Gondwana Res. 2023, 121, 56–71. [Google Scholar] [CrossRef]
- Han, Y.; Lei, Z.; Dong, Y.; Wang, Q.; Li, H.; Feng, F. The Icing Characteristics of a 1.5 MW Wind Turbine Blade and Its Influence on the Blade Mechanical Properties. Coatings 2024, 14, 242. [Google Scholar] [CrossRef]
- Zhang, T.; Lian, Y.; Xu, Z.; Li, Y. Effects of wind speed and heat flux on de-icing characteristics of wind turbine blade airfoil surface. Coatings 2024, 14, 852. [Google Scholar] [CrossRef]
- Douvi, E.; Douvi, D. Aerodynamic characteristics of wind turbines operating under hazard environmental conditions: A review. Energies 2023, 16, 7681. [Google Scholar] [CrossRef]
- Rekuviene, R.; Saeidiharzand, S.; Mažeika, L.; Samaitis, V.; Jankauskas, A.; Sadaghiani, A.K.; Gharib, G.; Muganlı, Z.; Koşar, A. A review on passive and active anti-icing and de-icing technologies. Appl. Therm. Eng. 2024, 250, 123474. [Google Scholar] [CrossRef]
- Skrimpas, G.A.; Kleani, K.; Mijatovic, N.; Sweeney, C.W.; Jensen, B.B.; Holboell, J. Detection of icing on wind turbine blades by means of vibration and power curve analysis. Wind Energy 2016, 19, 1819–1832. [Google Scholar] [CrossRef]
- Zhao, X.; Rose, J.L. Ultrasonic guided wave tomography for ice detection. Ultrasonics 2016, 67, 212–219. [Google Scholar] [CrossRef] [PubMed]
- Wang, P.; Zhou, W.; Bao, Y.; Li, H. Ice monitoring of a full-scale wind turbine blade using ultrasonic guided waves under varying temperature conditions. Struct. Control Health Monit. 2018, 25, e2138. [Google Scholar] [CrossRef]
- Roberge, P.; Lemay, J.; Ruel, J.; Bégin-Drolet, A. A new atmospheric icing detector based on thermally heated cylindrical probes for wind turbine applications. Cold Reg. Sci. Technol. 2018, 148, 131–141. [Google Scholar] [CrossRef]
- Xu, J.; Tan, W.; Li, T. Predicting fan blade icing by using particle swarm optimization and support vector machine algorithm. Comput. Electr. Eng. 2020, 87, 106751. [Google Scholar] [CrossRef]
- Li, Y.; Hou, L.; Tang, M.; Sun, Q.; Chen, J.; Song, W.; Yao, W.; Cao, L. Prediction of wind turbine blades icing based on feature Selection and 1D-CNN-SBiGRU. Multimed. Tools Appl. 2022, 81, 4365–4385. [Google Scholar] [CrossRef]
- Cheng, X.; Shi, F.; Liu, Y.; Liu, X.; Huang, L. Wind turbine blade icing detection: A federated learning approach. Energy 2022, 254, 124441. [Google Scholar] [CrossRef]
- Wang, Z.; Qin, B.; Sun, H.; Zhang, J.; Butala, M.D.; Demartino, C.; Peng, P.; Wang, H. An imbalanced semi-supervised wind turbine blade icing detection method based on contrastive learning. Renew. Energy 2023, 212, 251–262. [Google Scholar] [CrossRef]
- Jiang, G.; Yue, R.; He, Q.; Xie, P.; Li, X. Imbalanced learning for wind turbine blade icing detection via spatio-temporal attention model with a self-adaptive weight loss function. Expert Syst. Appl. 2023, 229, 120428. [Google Scholar] [CrossRef]
- Wang, F.; Niu, L.; Wang, T.; Ye, L. Wind Turbine Blade Icing Monitoring, De-Icing and Wear Prediction Device Based on Machine Vision Recognition Algorithm. In Proceedings of the 2024 IEEE 2nd International Conference on Control, Electronics and Computer Technology (ICCECT), Jilin, China, 26–28 April 2024; pp. 687–694. [Google Scholar]
- Aminzadeh, A.; Dimitrova, M.; Meiabadi, M.S.; Sattarpanah Karganroudi, S.; Taheri, H.; Ibrahim, H.; Wen, Y. Non-Contact Inspection Methods for Wind Turbine Blade Maintenance: Techno–Economic Review of Techniques for Integration with Industry 4.0. J. Nondestruct. Eval. 2023, 42, 54. [Google Scholar] [CrossRef]
- Wang, D.; Sun, H.; Lu, W.; Zhao, W.; Liu, Y.; Chai, P.; Han, Y. A novel binocular vision system for accurate 3-D reconstruction in large-scale scene based on improved calibration and stereo matching methods. Multimed. Tools Appl. 2022, 81, 26265–26281. [Google Scholar] [CrossRef]
- Liu, P.; Zhang, L.; Wang, M. Measurement of Large-Sized-Pipe Diameter Based on Stereo Vision. Appl. Sci. 2022, 12, 5277. [Google Scholar] [CrossRef]
- Zhou, S.; Zhang, G.; Yi, R.; Xie, Z. Research on vehicle adaptive real-time positioning based on binocular vision. IEEE Intell. Transp. Syst. Mag. 2021, 14, 47–59. [Google Scholar] [CrossRef]
- Ma, J.; Jiang, X.; Fan, A.; Jiang, J.; Yan, J. Image matching from handcrafted to deep features: A survey. Int. J. Comput. Vis. 2021, 129, 23–79. [Google Scholar] [CrossRef]
- De-Maeztu, L.; Villanueva, A.; Cabeza, R. Stereo matching using gradient similarity and locally adaptive support-weight. Pattern Recognit. Lett. 2011, 32, 1643–1651. [Google Scholar] [CrossRef]
- Mei, X.; Sun, X.; Zhou, M.; Jiao, S.; Wang, H.; Zhang, X. On building an accurate stereo matching system on graphics hardware. In Proceedings of the 2011 IEEE International Conference on Computer Vision Workshops (ICCV Workshops), Barcelona, Spain, 6–13 November 2011; pp. 467–474. [Google Scholar]
- Lee, Z.; Juang, J.; Nguyen, T.Q. Local disparity estimation with three-moded cross census and advanced support weight. IEEE Trans. Multimed. 2013, 15, 1855–1864. [Google Scholar] [CrossRef]
- Hosni, A.; Bleyer, M.; Gelautz, M. Secrets of adaptive support weight techniques for local stereo matching. Comput. Vis. Image Underst. 2013, 117, 620–632. [Google Scholar] [CrossRef]
- Wang, W.; Yan, J.; Xu, N.; Wang, Y.; Hsu, F.H. Real-time high-quality stereo vision system in FPGA. IEEE Trans. Circuits Syst. Video Technol. 2015, 25, 1696–1708. [Google Scholar] [CrossRef]
- Cheng, F.; Zhang, H.; Sun, M.; Yuan, D. Cross-trees, edge and superpixel priors-based cost aggregation for stereo matching. Pattern Recognit. 2015, 48, 2269–2278. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.; Jun, D.; Eem, C.; Hong, H. Improved census transform for noise robust stereo matching. Opt. Eng. 2016, 55, 063107. [Google Scholar] [CrossRef]
- Lv, C.; Li, J.; Kou, Q.; Zhuang, H.; Tang, S. Stereo matching algorithm based on HSV color space and improved census transform. Math. Probl. Eng. 2021, 2021, 1857327. [Google Scholar] [CrossRef]
- Zhou, Z.; Pang, M. Stereo matching algorithm of multi-feature fusion based on improved census transform. Electronics 2023, 12, 4594. [Google Scholar] [CrossRef]
- Yang, Z.; Li, Z. Stereo Matching Algorithm Based on Improved Census Transform. In Proceedings of the 2023 4th International Conference on Computer Vision, Image and Deep Learning (CVIDL), Zhuhai, China, 12–14 May 2023; pp. 422–425. [Google Scholar]
- Chang, X.; Zhou, Z.; Wang, L.; Shi, Y.; Zhao, Q. Real-time accurate stereo matching using modified two-pass aggregation and winner-take-all guided dynamic programming. In Proceedings of the 2011 International Conference on 3D Imaging, Modeling, Processing, Visualization and Transmission, Hangzhou, China, 16–19 May 2011; pp. 73–79. [Google Scholar]
- Scharstein, D.; Szeliski, R. High-accuracy stereo depth maps using structured light. In Proceedings of the 2003 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, Madison, WI, USA, 18–20 June 2003; Volume 1. [Google Scholar]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2007, 30, 328–341. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | 0 | 3 | 6 | 9 | 12 |
|---|---|---|---|---|---|
| SGM | 4.99 | 5.72 | 7.32 | 8.16 | 9.87 |
| AD-Census | 4.57 | 5.28 | 5.88 | 6.92 | 8.76 |
| Proposed algorithm | 3.97 | 3.99 | 4.21 | 4.83 | 6.52 |
| Algorithm | 0 | 2 | 4 | 6 | 8 |
|---|---|---|---|---|---|
| SGM | 4.99 | 8.78 | 11.18 | 14.09 | 16.57 |
| AD-Census | 4.57 | 6.20 | 8.30 | 10.15 | 12.21 |
| Proposed algorithm | 3.97 | 5.20 | 7.21 | 8.97 | 10.19 |
| Algorithm | SGM | AD-Census | Proposed Algorithm |
|---|---|---|---|
| Time | 6.786 | 3.074 | 3.201 |
| Specification | Parameter |
|---|---|
| Maximum Resolution | 2688 × 1520 |
| Sensor Model | OV4689 (1/) |
| Supply Voltage | DC 5V ± 5% |
| Operating Temperature Range | −30 °C to 70 °C |
| Field of View (FOV) | 80° |
| No | Volume (mm3) | Measured Volume (mm3) | Error |
|---|---|---|---|
| 1 | 574,456.52 | 544,133.70 | 5.28% |
| 2 | 427,173.91 | 391,503.49 | 8.35% |
| 3 | 417,391.30 | 397,165.91 | 4.85% |
| No | Volume (mm3) | Measured Volume (mm3) | Error (%) |
|---|---|---|---|
| 1 | 97,608.69 | 92,667.37 | 5.06% |
| 2 | 197,717.39 | 184,961.32 | 6.45% |
| 3 | 257,391.30 | 232,847.36 | 9.54% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, F.; Guo, Z.; Han, Q.; Qi, W. Estimation of Wind Turbine Blade Icing Volume Based on Binocular Vision. Appl. Sci. 2025, 15, 114. https://doi.org/10.3390/app15010114
Wei F, Guo Z, Han Q, Qi W. Estimation of Wind Turbine Blade Icing Volume Based on Binocular Vision. Applied Sciences. 2025; 15(1):114. https://doi.org/10.3390/app15010114
Chicago/Turabian StyleWei, Fangzheng, Zhiyong Guo, Qiaoli Han, and Wenkai Qi. 2025. "Estimation of Wind Turbine Blade Icing Volume Based on Binocular Vision" Applied Sciences 15, no. 1: 114. https://doi.org/10.3390/app15010114
APA StyleWei, F., Guo, Z., Han, Q., & Qi, W. (2025). Estimation of Wind Turbine Blade Icing Volume Based on Binocular Vision. Applied Sciences, 15(1), 114. https://doi.org/10.3390/app15010114