
Precise Calculation of Inverse Kinematics of the Center of Gravity for Bipedal Walking Robots


Abstract
1. Introduction
2. Materials and Methods
2.1. Robot Structure
2.2. Robot Kinematics
2.3. Robot Dynamics
2.4. CoG and ZMP Calculations
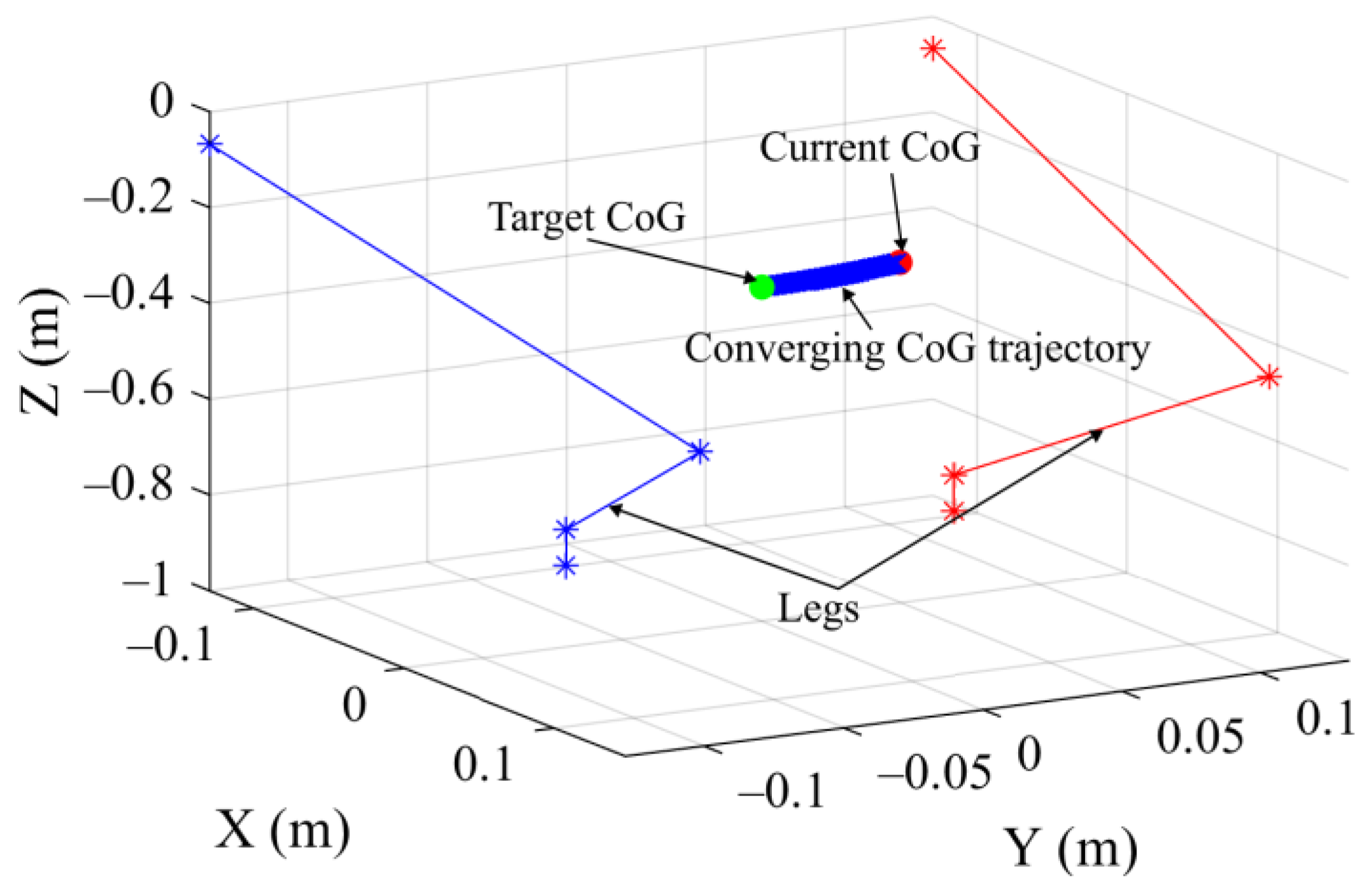
2.5. Converging Center of Gravity Algorithm
| Algorithm 1. Converging center of gravity algorithm (CCG) | ||
| 1: | fixed ⇐ 1 | |
| 2: | moving ⇐ 2 | |
| 3: | For each point in CoG_Traj | |
| 4: | ⇐ point (1) | |
| 5: | ⇐ point (2) | |
| 6: | ||
| 7: | While > | |
| 8: | (Equation (19)) | |
| 9: | (Equation (20)) | |
| 10: | (Equation (21)) | |
| 11: | (Equation (22)) | |
| 12: | ||
| 13: | (Equations (5)–(10)) | |
| 14: | (Equation (19)) | |
| 15: | (Equation (20)) | |
| 16: | If < | |
| 17: | Save joint angles | |
| 18: | Else | |
| 19: | (Equation (11)) | |
| 20: | Continue cycle | |
| 21: | End if | |
| 22: | transitory ⇐ j | |
| 23: | j ⇐ i | |
| 24: | i ⇐ transitory | |
| 25: | End while | |
| 26: | End for | |
2.6. Simulation Model
3. Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Optimus (Robot). Available online: https://en.wikipedia.org/wiki/Optimus_(robot) (accessed on 15 March 2024).
- Agility Robotics. Available online: https://Agilityrobotics.Com/ (accessed on 15 March 2024).
- Kaneko, K.; Kaminaga, H.; Sakaguchi, T.; Kajita, S.; Morisawa, M.; Kumagai, I.; Kanehiro, F. Humanoid Robot HRP-5P: An Electrically Actuated Humanoid Robot with High-Power and Wide-Range Joints. IEEE Robot. Autom. Lett. 2019, 4, 1431–1438. [Google Scholar] [CrossRef]
- Sugihara, T.; Morisawa, M. A Survey: Dynamics of Humanoid Robots. Adv. Robot. 2020, 34, 1338–1352. [Google Scholar] [CrossRef]
- Rokbani, N.; Cherif, A.; Alimi, A.M. Toward Intelligent Biped-Humanoids Gaits Generation. In Humanoid Robots; Choi, B., Ed.; Intech: Rijeka, Croatia, 2009; pp. 259–272. [Google Scholar] [CrossRef]
- Chevallereau, C.; Razavi, H.; Six, D.; Aoustin, Y.; Grizzle, J. Self-Synchronization and Self-Stabilization of 3D Bipedal Walking Gaits. Robot. Auton. Syst. 2018, 100, 43–60. [Google Scholar] [CrossRef]
- Yin, C.; Zhu, J.; Xu, H. Walking Gait Planning And Stability Control. In Humanoid Robots; Choi, B., Ed.; Intech: Rijeka, Croatia, 2009; pp. 297–332. [Google Scholar] [CrossRef]
- Tang, Z.; Er, M.J. Humanoid 3D Gait Generation Based on Inverted Pendulum Model. In Proceedings of the 22nd IEEE International Symposium on Intelligent Control, ISIC 2007. Part of IEEE Multi-conference on Systems and Control, Singapore, 1–3 October 2007; pp. 339–344. [Google Scholar] [CrossRef]
- Kajita, S.; Kanehiro, F.; Kaneko, K.; Fujiwara, K.; Harada, K.; Yokoi, K.; Hirukawa, H. Biped Walking Pattern Generation by Using Preview Control of Zero-Moment Point. In Proceedings of the 2003 IEEE International Conference on Robotics and Automation, Taipei, Taiwan, 14–19 September 2003; pp. 1620–1626. [Google Scholar] [CrossRef]
- Vukobratovic, M.; Borovac, B. Zero-Moment Point—Thirty Five Years of Its Life. Int. J. Humanoid Robot. 2012, 1, 157–173. [Google Scholar] [CrossRef]
- Lavor, C.; Xambó-Descamps, S.; Zaplana, I. Robot Kinematics. In SpringerBriefs in Mathematics; Springer: Cham, Switzerland, 2018; pp. 75–100. [Google Scholar] [CrossRef]
- Maalouf, N.; Elhajj, I.H.; Shammas, E.; Asmar, D. Biomimetic Energy-Based Humanoid Gait Design. J. Intell. Robot. Syst. 2020, 100, 203–221. [Google Scholar] [CrossRef]
- Kobayashi, T.; Sekiyama, K.; Hasegawa, Y.; Aoyama, T.; Fukuda, T. Virtual-Dynamics-Based Reference Gait Speed Generator for Limit-Cycle-Based Bipedal Gait. Robomech J. 2018, 5, 18. [Google Scholar] [CrossRef]
- Alba, M.; Prada, J.C.G.; Meneses, J.; Rubio, H. Center of Percussion and Gait Design of Biped Robots. Mech. Mach. Theory 2010, 45, 1681–1693. [Google Scholar] [CrossRef]
- Lim, I.S.; Kwon, O.; Park, J.H. Gait Optimization of Biped Robots Based on Human Motion Analysis. Robot. Auton. Syst. 2014, 62, 229–240. [Google Scholar] [CrossRef]
- Atmeh, G.; Subbarao, K. A Neuro-Dynamic Walking Engine for Humanoid Robots. Robot. Auton. Syst. 2018, 110, 124–138. [Google Scholar] [CrossRef]
- Hildebrandt, A.-C.; Ritt, K.; Wahrmann, D.; Wittmann, R.; Sygulla, F.; Seiwald, P.; Rixen, D.; Buschmann, T. Torso Height Optimization for Bipedal Locomotion. Int. J. Adv. Robot. Syst. 2018, 15. [Google Scholar] [CrossRef]
- Khomariah, N.E.; Pramadihanto, D.; Dewanto, R.S. FLoW Bipedal Robot: Walking Pattern Generation. In Proceedings of the 2015 International Electronics Symposium: Emerging Technology in Electronic and Information, IES 2015, Surabaya, Indonesia, 29–30 September 2015; pp. 73–78. [Google Scholar] [CrossRef]
- Park, I.W.; Kim, J.Y.; Lee, J.; Oh, J.H. Online Free Walking Trajectory Generation for Biped Humanoid Robot KHR-3(HUBO). In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, Orlando, FL, USA, 15–19 May 2006; pp. 1231–1236. [Google Scholar] [CrossRef]
- Mandava, R.K.; Vundavilli, P.R. Forward and Inverse Kinematic Based Full Body Gait Generation of Biped Robot. In Proceedings of the International Conference on Electrical, Electronics, and Optimization Techniques, ICEEOT 2016, Chennai, India, 3–5 March 2016; pp. 3301–3305. [Google Scholar] [CrossRef]
- Yang, L.; Liu, Z.; Chen, Y. Bipedal Walking Pattern Generation and Control for Humanoid Robot with Bivariate Stability Margin Optimization. Adv. Mech. Eng. 2018, 10, 2018. [Google Scholar] [CrossRef]
- Olcay, T.; Özkurt, A. Design and Walking Pattern Generation of a Biped Robot. Turk. J. Electr. Eng. Comput. Sci. 2017, 25, 761–769. [Google Scholar] [CrossRef]
- Carpentier, J.; Tonneau, S.; Naveau, M.; Stasse, O.; Mansard, N. A Versatile and Efficient Pattern Generator for Generalized Legged Locomotion. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3555–3561. [Google Scholar] [CrossRef]
- Chae, H.-S. Development of the Modeling for Biped Robot Using Inverse Kinematics. WSEAS Trans. Syst. 2004, 3, 2788–2792. [Google Scholar]
- Tevatia, G.; Schaal, S. Inverse Kinematics for Humanoid Robots. In Proceedings of the IEEE International Conference on Robotics and Automation. Symposia Proceedings, San Francisco, CA, USA, 24–28 April 2000; pp. 294–299. [Google Scholar] [CrossRef]
- Efrain, O.; Ponce, R.; Mansard, N.; Souères, P.; Ramos, O.E.; Soù, P. Whole-Body Motion Integrating the Capture Point in the Operational Space Inverse Dynamics Control. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 707–712. [Google Scholar] [CrossRef]
- Shibata, M.; Natori, T. Impact Force Reduction for Biped Robot Based on Decoupling COG Control Scheme. In Proceedings of the 6th International Workshop on Advanced Motion Control. Proceedings (Cat. No.00TH8494), Nagoya, Japan, 30 March 2000–1 April 2000; pp. 612–617. [Google Scholar] [CrossRef]
- Sugihara, T. Solvability-Unconcerned Inverse Kinematics by the Levenberg–Marquardt Method. IEEE Trans. Robot. 2011, 27, 984–991. [Google Scholar] [CrossRef]
- Bajrami, X.; Dermaku, A.; Likaj, R.; Demaku, N.; Kikaj, A.; Maloku, S.; Kikaj, D. Trajectory Planning and Inverse Kinematics Solver for Real Biped Robot with 10 DOF-s. IFAC-PapersOnLine 2016, 49, 88–93. [Google Scholar] [CrossRef]
- Buschmann, T.; Lohmeier, S.; Bachmayer, M.; Ulbrich, H.; Pfeiffer, F. A Collocation Method for Real-Time Walking Pattern Generation. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Pittsburgh, PA, USA, 29 November 2007–1 December 2007; pp. 1–6. [Google Scholar] [CrossRef]
- Nakanishi, J.; Mistry, M.; Schaal, S. Inverse Dynamics Control with Floating Base and Constraints. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007; pp. 1942–1947. [Google Scholar] [CrossRef]
- Clever, D.; Hu, Y.; Mombaur, K. Humanoid Gait Generation in Complex Environments Based on Template Models and Optimality Principles Learned from Human Beings. Int. J. Robot. Res. 2018, 37, 1184–1204. [Google Scholar] [CrossRef]
- Bayraktaroğlu, Z.Y.; Acar, M.; Gerçek, A.; Tan, N.M. Design and Development of the I.T.U. Biped Robot. Gazi Univ. J. Sci. 2018, 31, 251–271. [Google Scholar]
- Denavit, J.; Hartenberg, R.S. A Kinematic Notation for Lower-Pair Mechanisms Based on Matrices. J. Appl. Mech. 1955, 22, 215–221. [Google Scholar] [CrossRef]
- Ali, M.A.; Park, H.A.; Lee, C.S.G. Closed-Form Inverse Kinematic Joint Solution for Humanoid Robots. In Proceedings of the IEEE/RSJ 2010 International Conference on Intelligent Robots and Systems, IROS 2010—Conference Proceedings, Taipei, Taiwan, 18–22 October 2010; pp. 704–709. [Google Scholar] [CrossRef]
- Yapıcı, K.O. 14 Serbestlik Dereceli İki Ayaklı Bir Robotun Dinamik Yürüme Hareketinin Kontrolü. Master Thesis, ITU Science and Technology Institute, İstanbul, Turkey, 2008. [Google Scholar]
- Simscape Multibody. Available online: https://www.mathworks.com/products/simscape-multibody.html (accessed on 15 March 2024).
- Spatial Contact Force. Available online: https://www.mathworks.com/help/sm/ref/Spatialcontactforce.html?SearchHighlight=spatial%20contact&s_tid=srchtitle_support_results_1_spatial%20contact (accessed on 15 March 2024).
- Inertia Sensor. Available online: https://www.mathworks.com/help/sm/ref/Inertiasensor.html?S_tid=srchtitle_site_search_1_inertia%20sensor (accessed on 15 March 2024).












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Symbol | Value | Unit |
|---|---|---|
| −0.14 | m | |
| 0.13 | m | |
| −0.07 | m | |
| 0.422 | m | |
| 0.4 | m | |
| 0.075 | m |
| Part Name | (m) | (m) | (m) | (kg) |
|---|---|---|---|---|
| Torso | 0.000006 | 0.020549 | 0.157635 | 2.387902 |
| Hip roll body | 0.000003 | 0.035534 | 0.0661 | 2.139072 |
| Hip yaw body | −0.009912 | 0.002801 | −0.0228 | 0.71518 |
| Upper leg body | 0.186095 | −0.004384 | −0.003505 | 3.804756 |
| Lower leg body | 0.180778 | −0.007 | 0.000426 | 2.805996 |
| Ankle roll body | −0.000011 | −0.001187 | 0.001606 | 0.022225 |
| Foot | 0.058582 | 0.000012 | 0.018663 | 1.584761 |
| Joint No. | ||||
|---|---|---|---|---|
| 1 | 0 | 0 | ||
| 2 | 0 | 0 | ||
| 3 | 0 | 0 | ||
| 4 | 0 | 0 | ||
| 5 | 0 | 0 | ||
| 6 | 0 | 0 |
| Parameter | Value | Unit | Explanation |
|---|---|---|---|
| 0.3 | m | Step length | |
| 0.065 | m | Distance between feet | |
| 0.075 | m | Step height | |
| 0.01 | m | Contact sphere radius | |
| 6.00 × 104 | N/m | Contact rigidity | |
| 6.00 × 103 | Ns/m | Contact dampening ratio | |
| 0.001 | m | Precision of calculation | |
| 0.001 | Unit vector magnitude coefficient |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Şanlıtürk, İ.H.; Kocabaş, H. Precise Calculation of Inverse Kinematics of the Center of Gravity for Bipedal Walking Robots. Appl. Sci. 2024, 14, 3706. https://doi.org/10.3390/app14093706
Şanlıtürk İH, Kocabaş H. Precise Calculation of Inverse Kinematics of the Center of Gravity for Bipedal Walking Robots. Applied Sciences. 2024; 14(9):3706. https://doi.org/10.3390/app14093706
Chicago/Turabian StyleŞanlıtürk, İsmail Hakkı, and Hikmet Kocabaş. 2024. "Precise Calculation of Inverse Kinematics of the Center of Gravity for Bipedal Walking Robots" Applied Sciences 14, no. 9: 3706. https://doi.org/10.3390/app14093706
APA StyleŞanlıtürk, İ. H., & Kocabaş, H. (2024). Precise Calculation of Inverse Kinematics of the Center of Gravity for Bipedal Walking Robots. Applied Sciences, 14(9), 3706. https://doi.org/10.3390/app14093706