

An Integrated Approach to Precedence-Constrained Multi-Agent Task Assignment and Path Finding for Mobile Robots in Smart Manufacturing †


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Methods
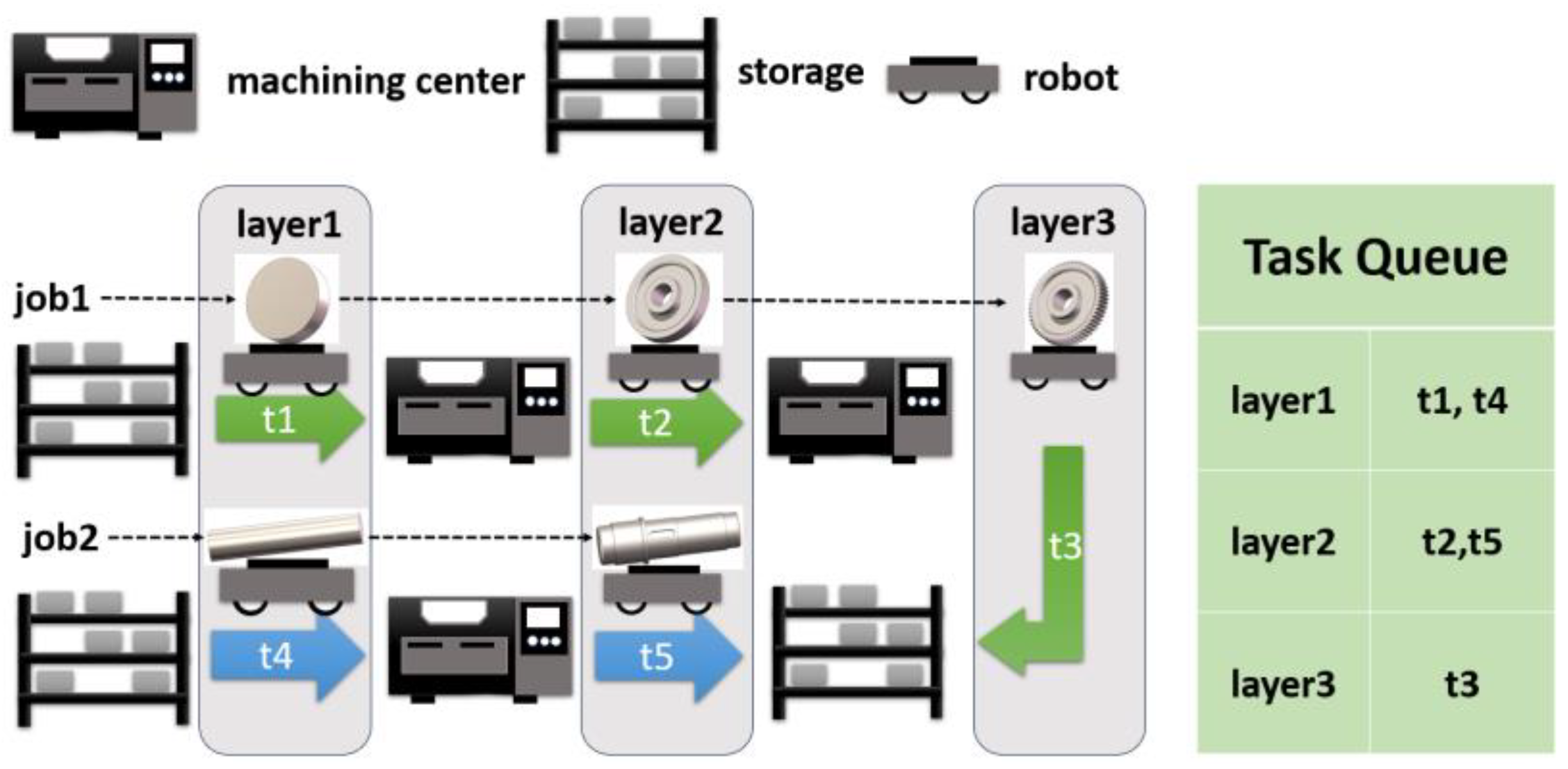
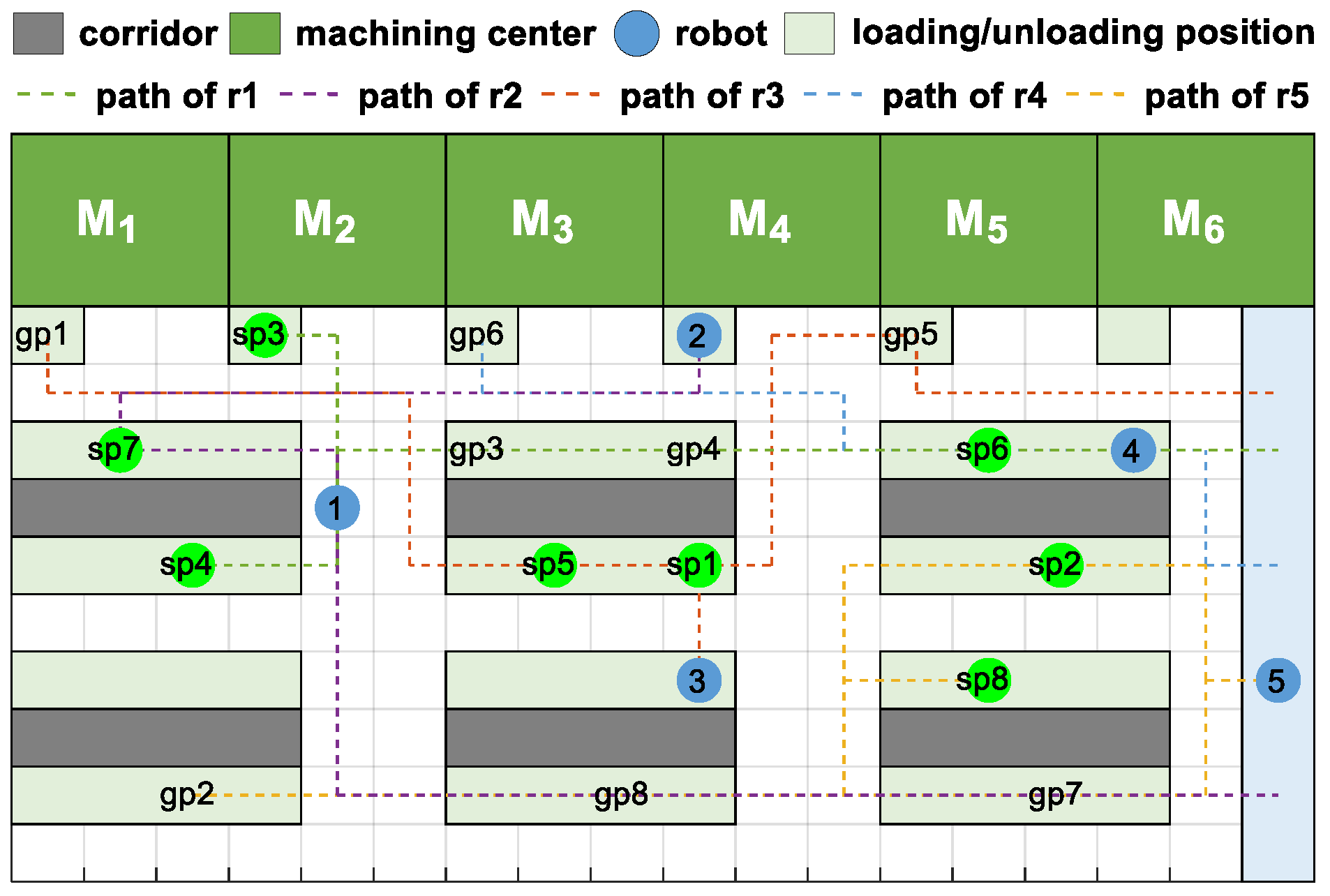
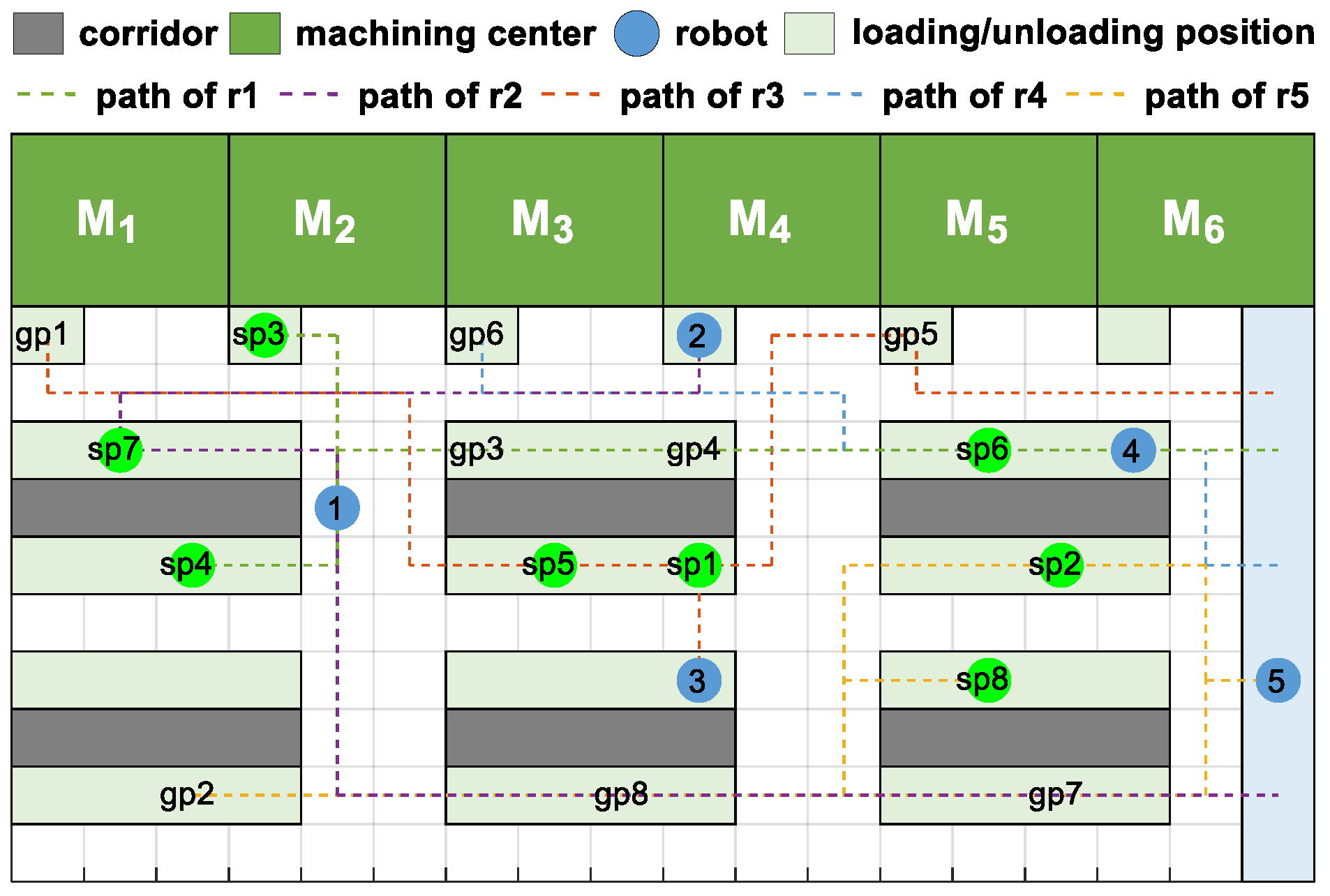
2.1. Problem Formulation
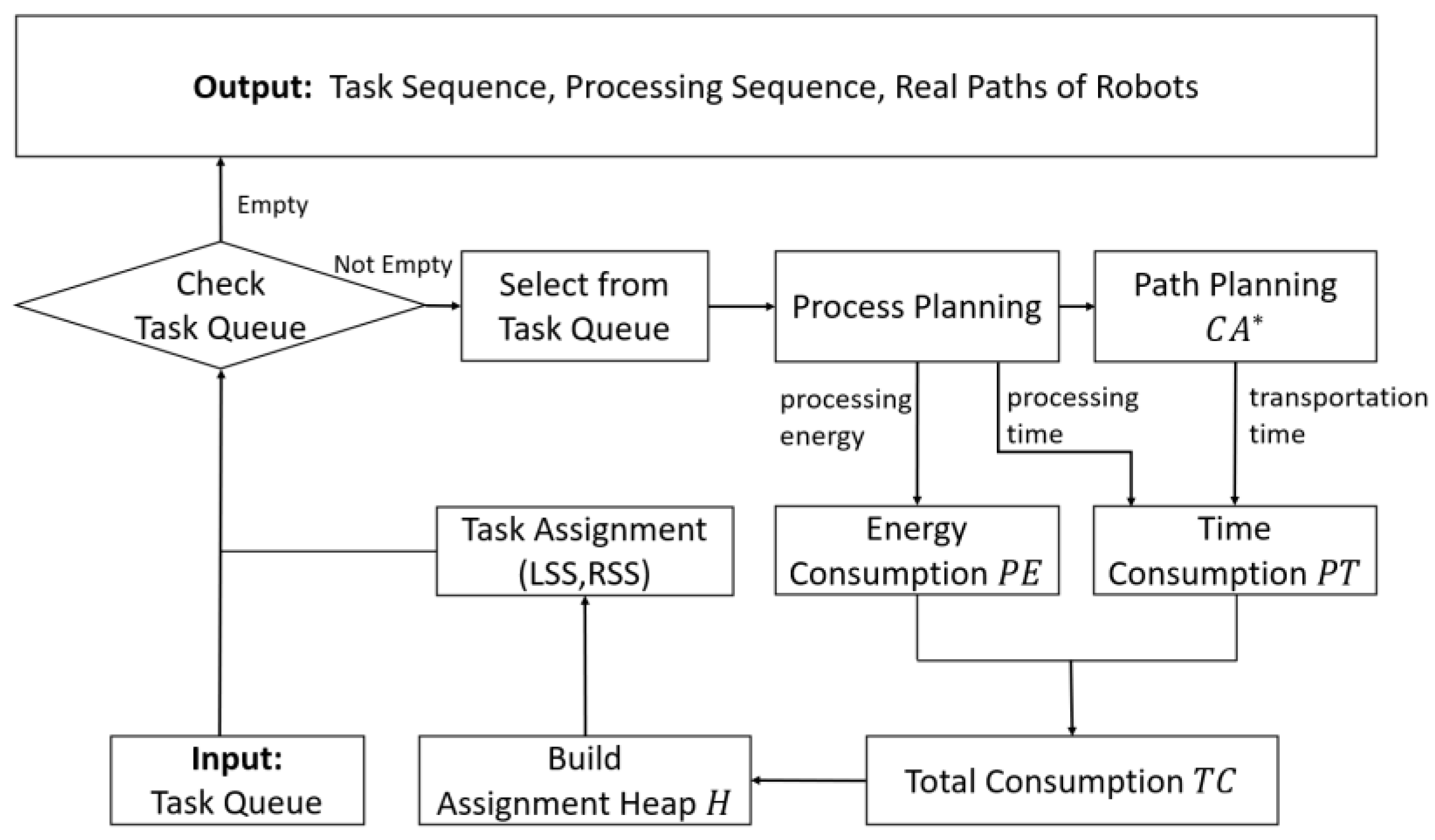
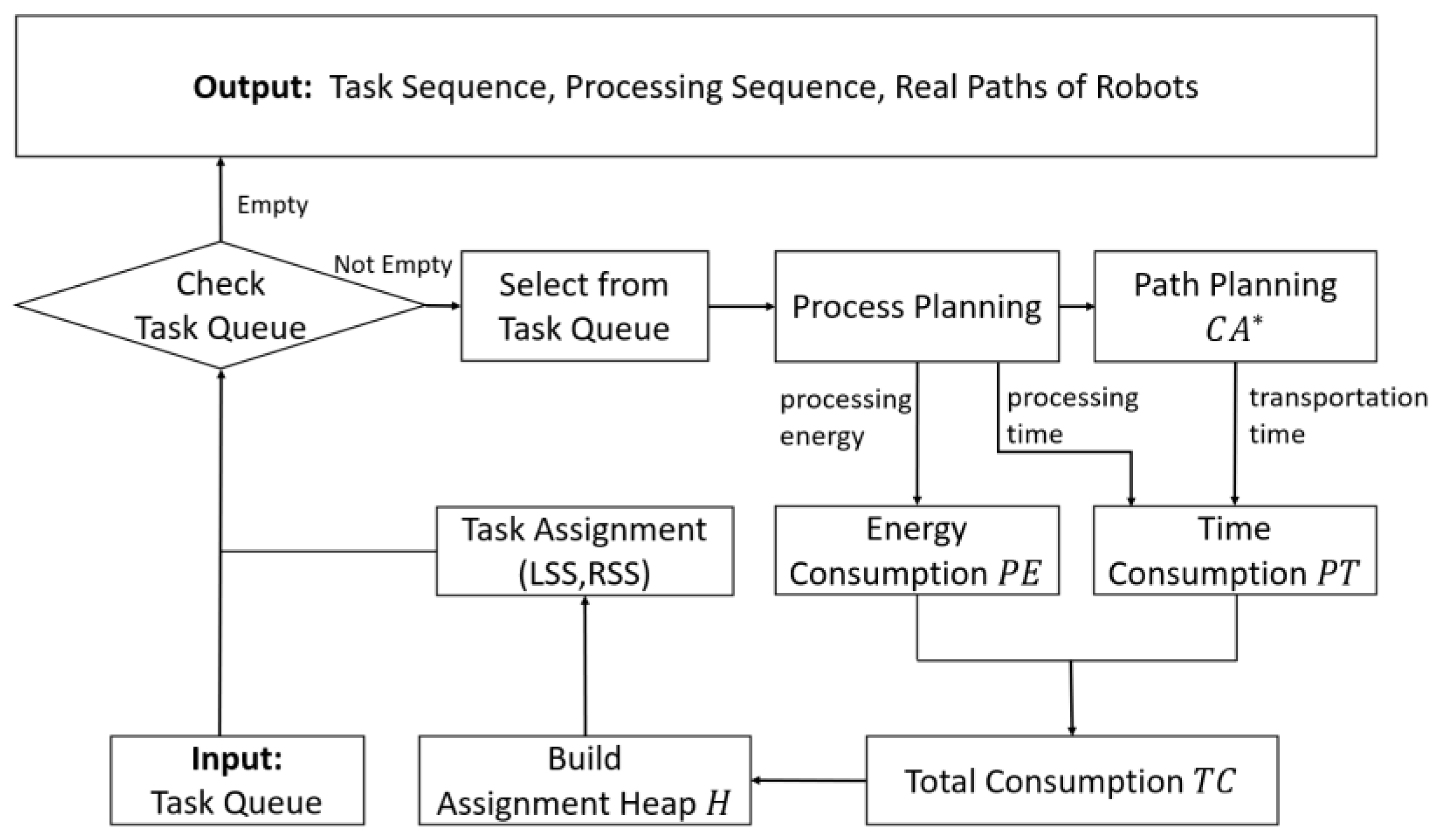
2.2. Integrated Task and Path Planning
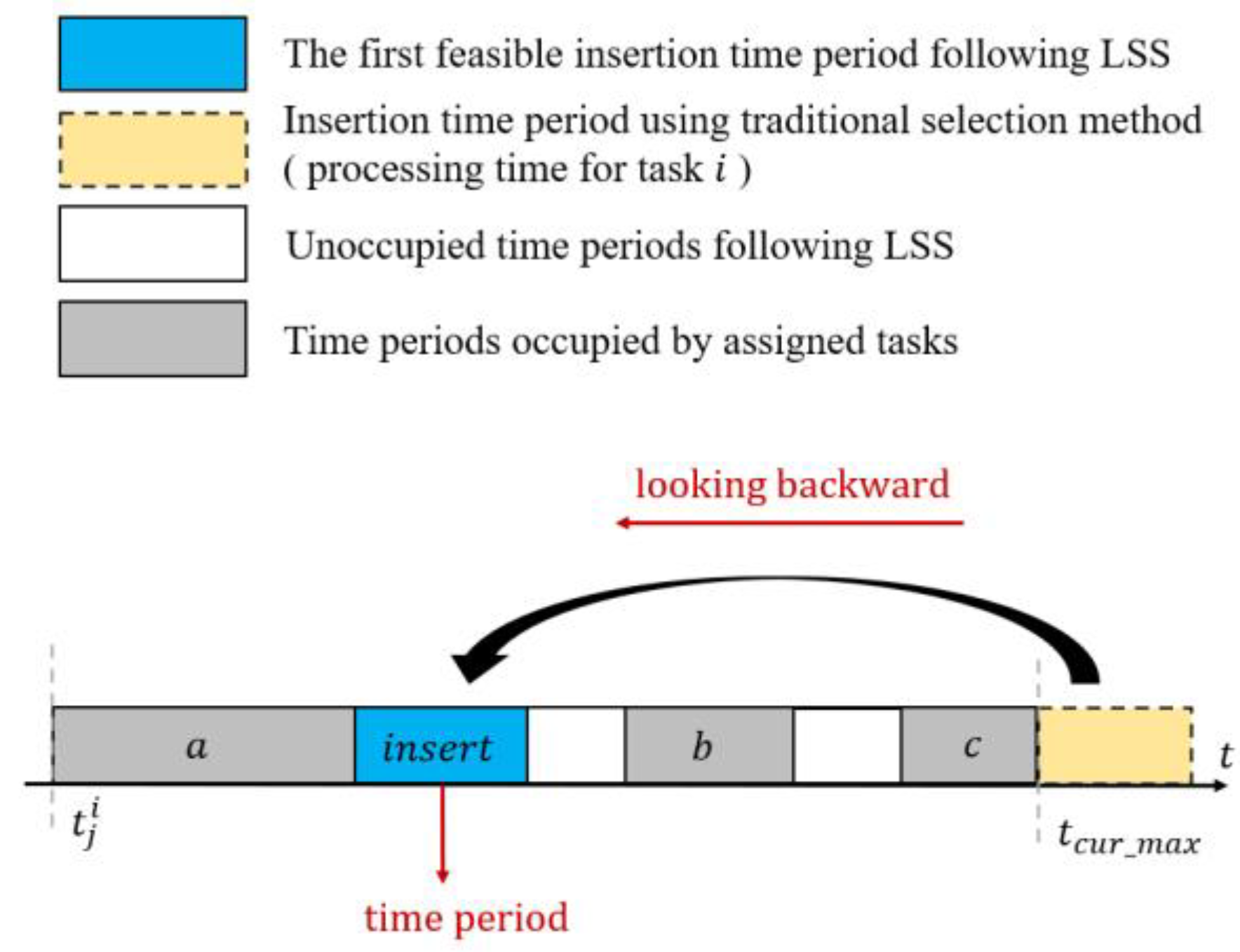
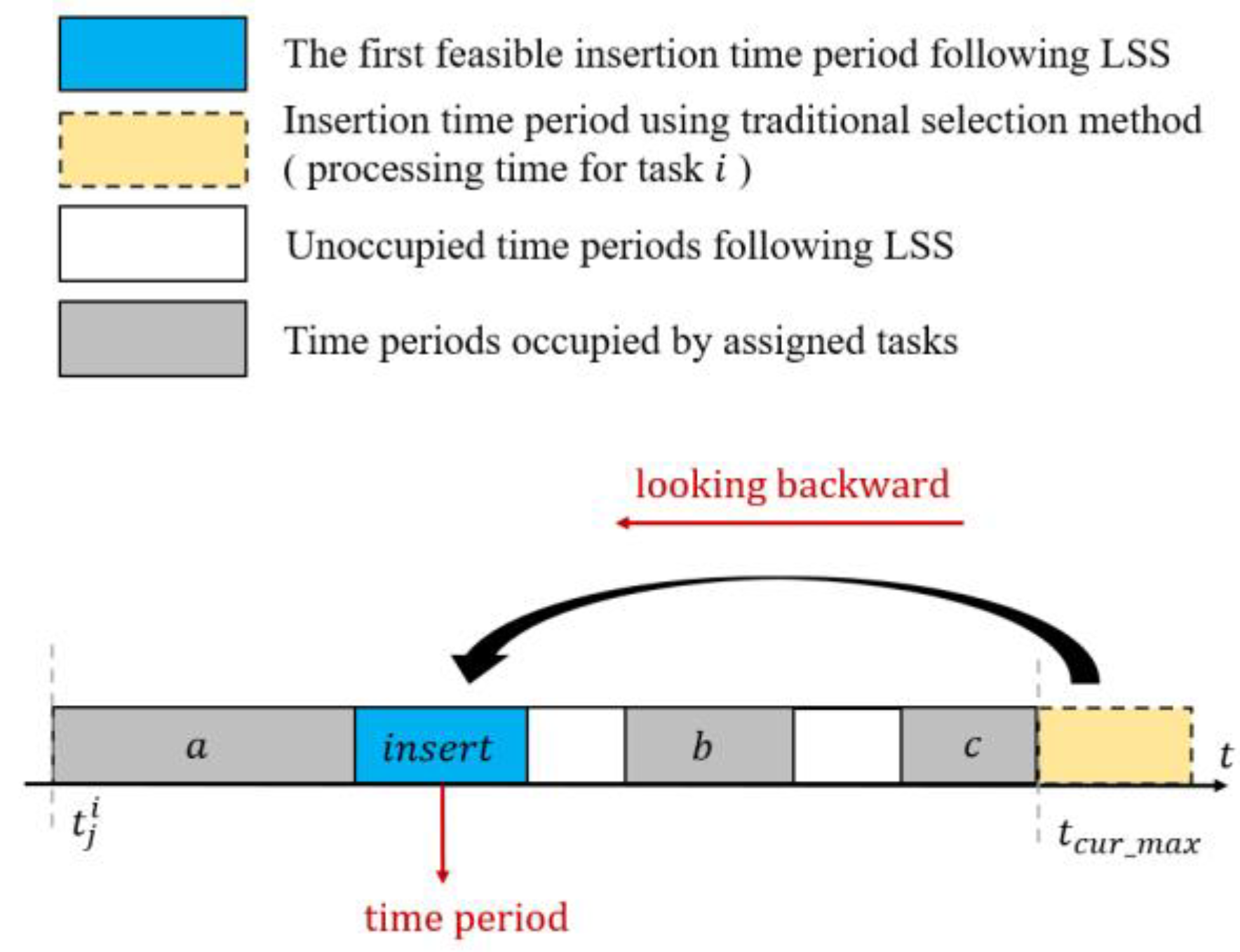
2.2.1. Looking-Backward Search Strategy (LSS)
| Algorithm 1 | Update Processing Sequence via LSS [28] |
| Input: | current task , robot , machining center |
| Output: | processing mapping table |
| 1: | Initialize |
| 2: | for all do |
| 3: | if then |
| 4: | ++ |
| 5: | if then |
| 6: | for all do |
| 7: | = |
| 8: | end for |
| 9: | end if |
| 10: | end if |
| 11: | if then |
| 12: | |
| 13: | end if |
| 14: | end for |
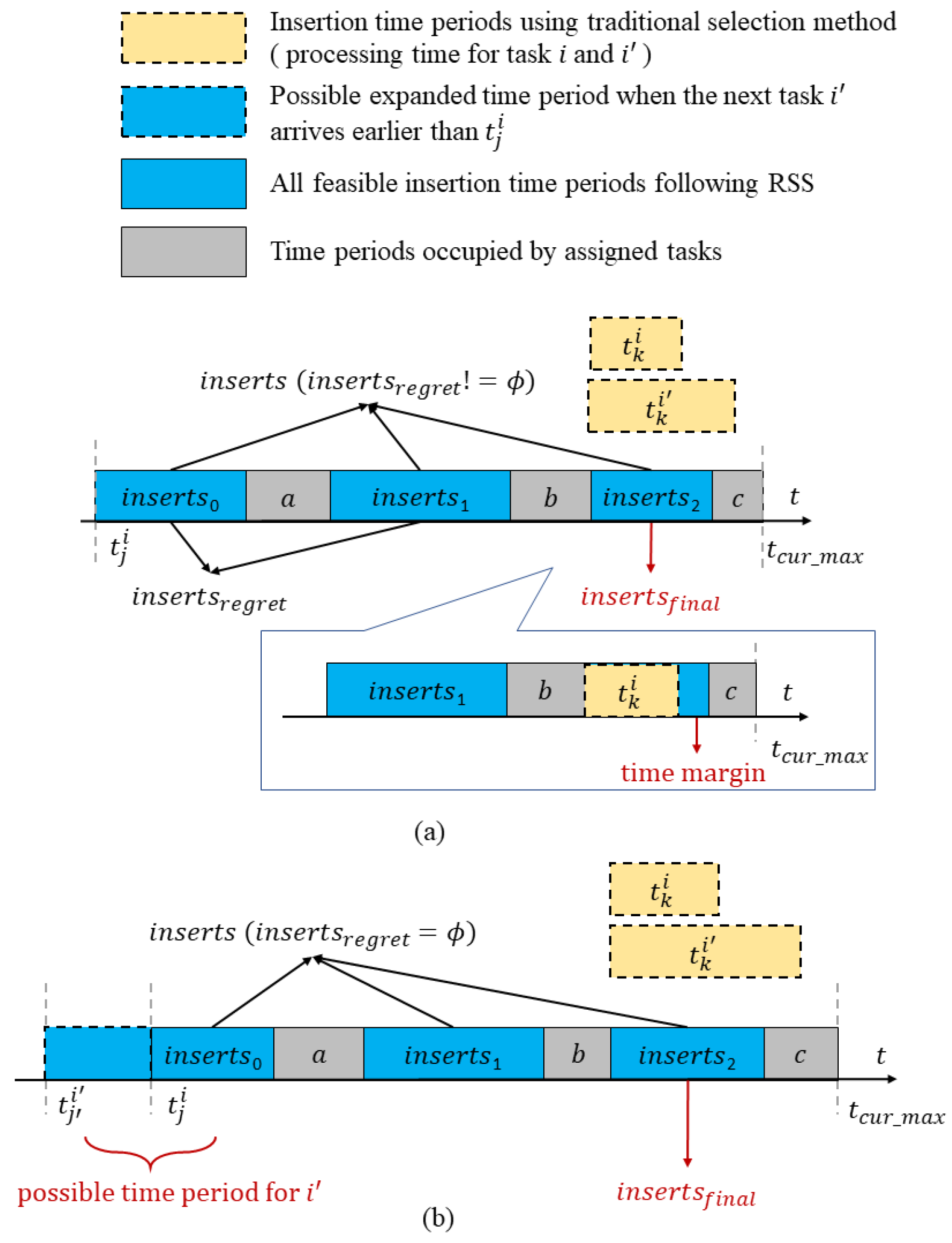
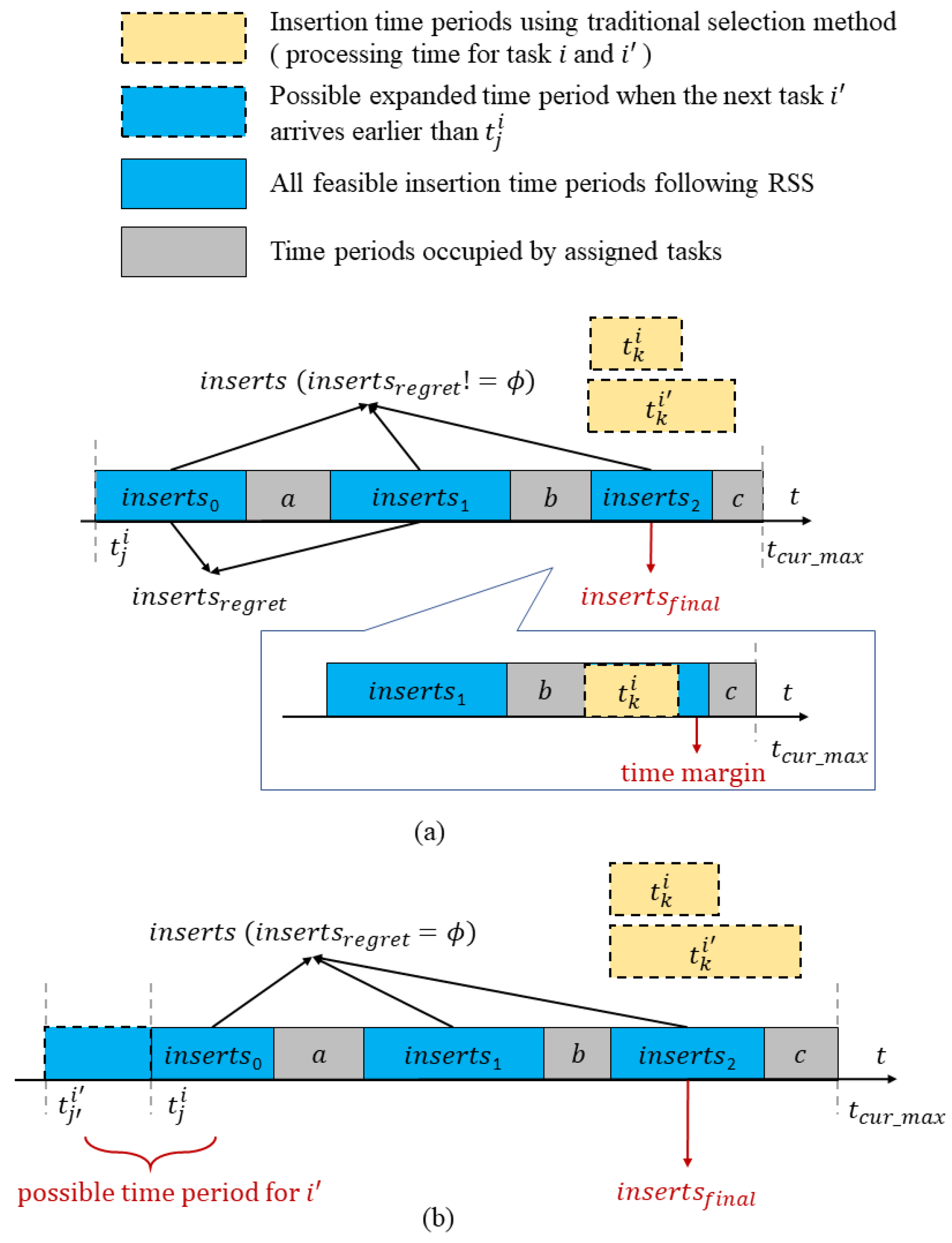
2.2.2. Regret-Based Search Strategy (RSS)
- An array is defined to save all feasible time periods that allow the insertion of task . Note that the time period mentioned in Figure 3 is the same as when the size of is 1.
- Then, the insertion of the next task is considered by filtering out the time periods that allow the insertion of task , which can be accessed by the index .
- Finally, the final time period of task is determinized depending on which of the two cases shown in Figure 4 applies. The details of the two cases are provided as follows.
| Algorithm 2 | Update Processing Sequence via RSS [28] |
| Input: | current task , next task , robot , machining center |
| Output: | processing mapping table |
| 1: | Initialize |
| 2: | for all do |
| 3: | Find all feasible time periods of task |
| 4: | end for |
| 5: | //regret |
| 6: | Filter time periods |
| 7: | ifthen |
| 8: | max () |
| 9: | end if |
| 10: | if then |
| 11: | min () |
| 12: | end if |
| 13: | //insert |
| 14: | for all do |
| 15: | |
| 16: | end for |
3. Results of Simulation Experiments and Discussion
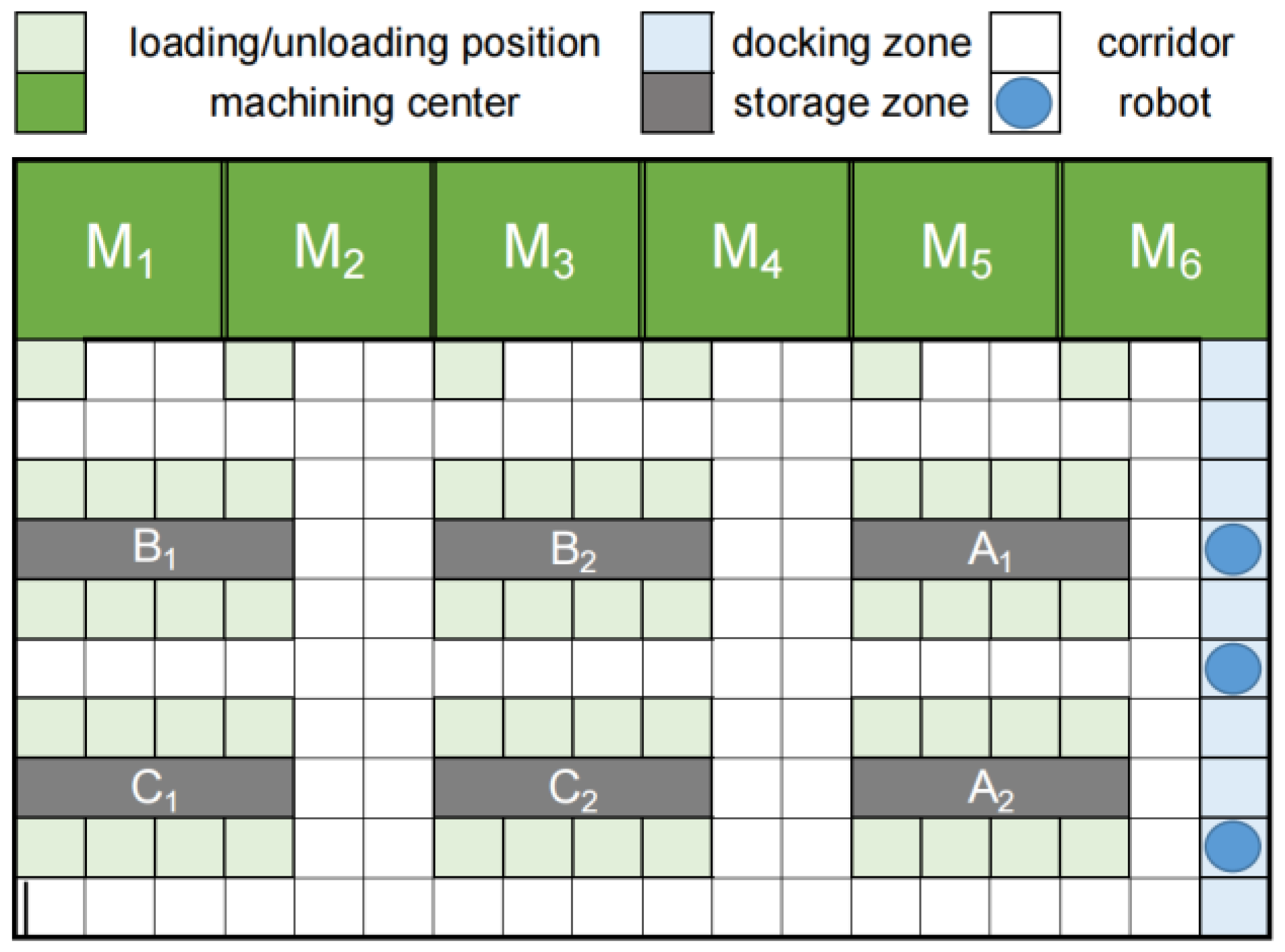
3.1. Experiment Settings
3.2. Performance Analysis with Small-Scale Problem
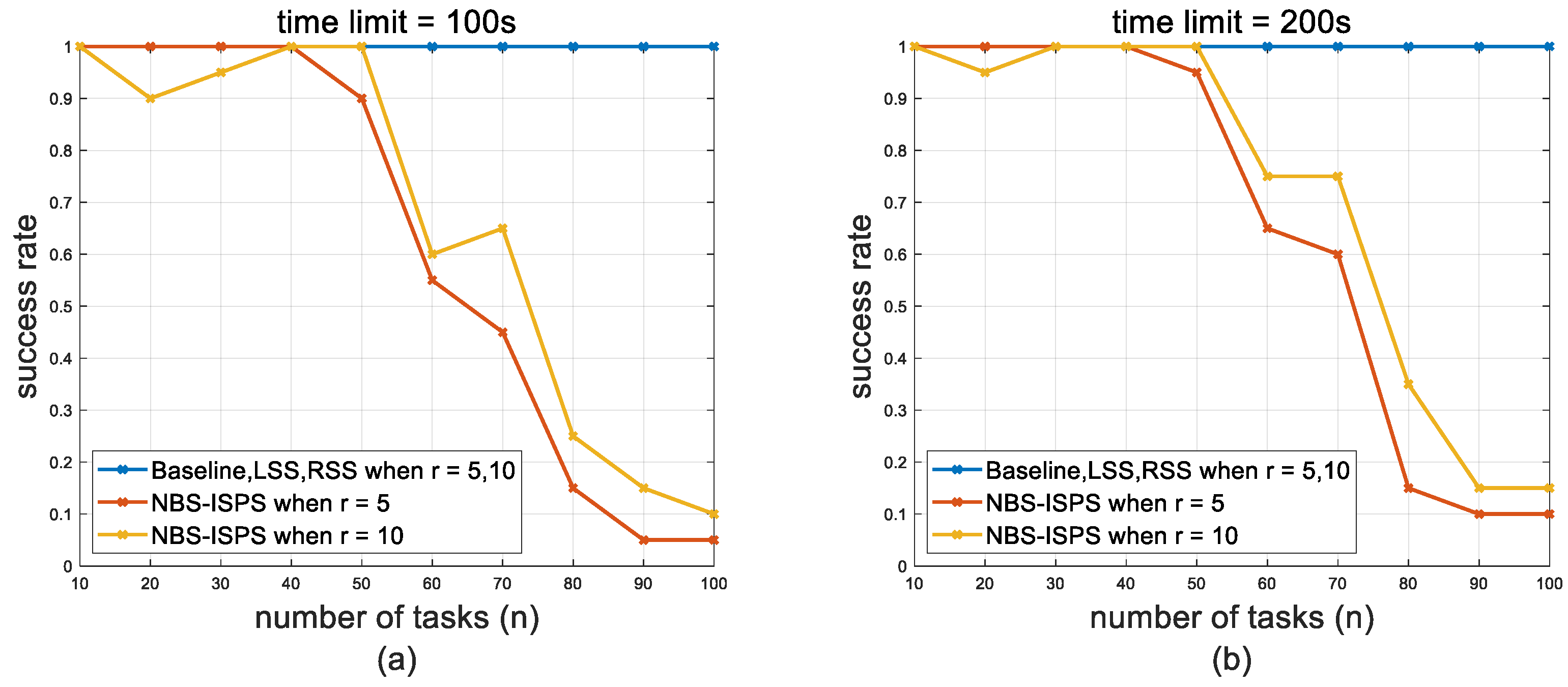
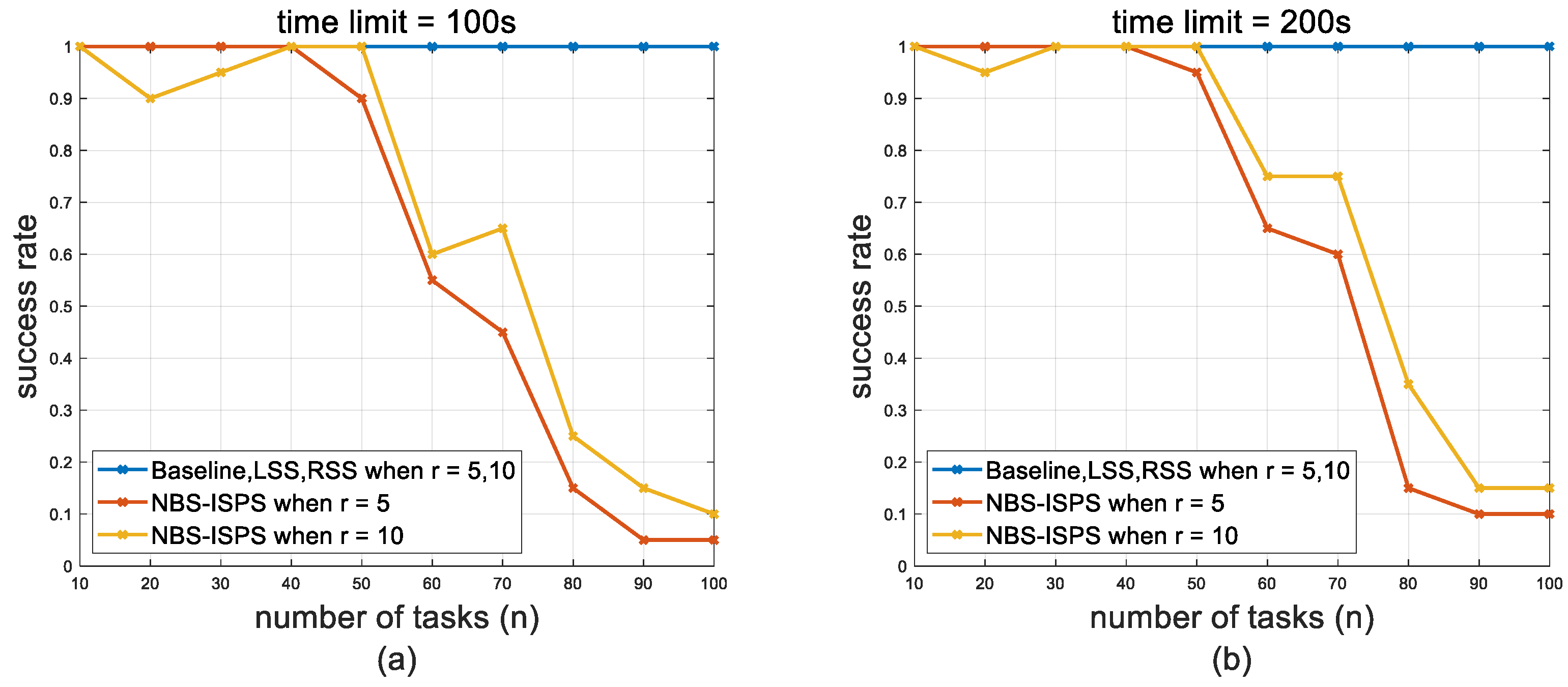
3.2.1. Analysis of Success Rate in Generating Feasible Solutions
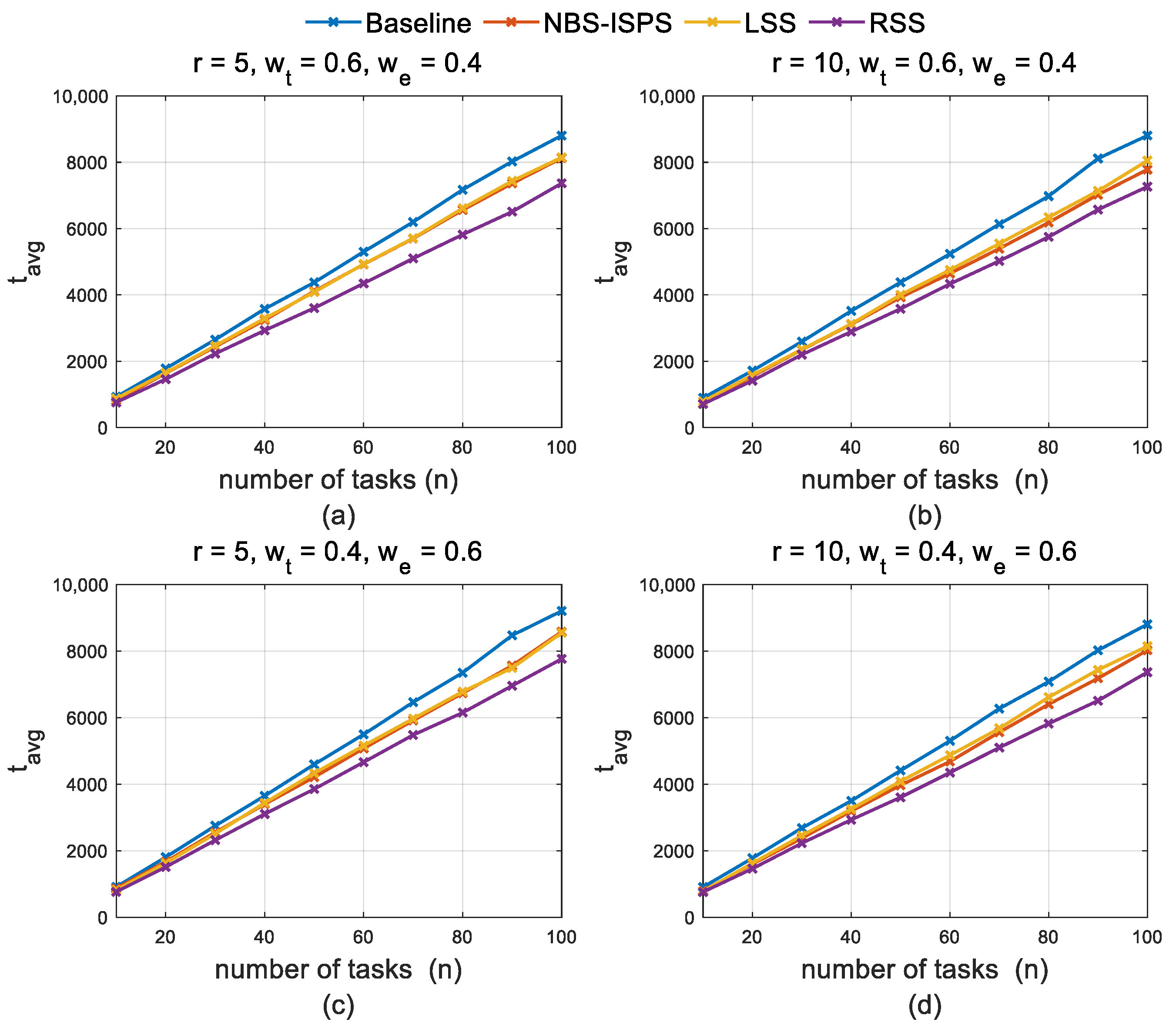
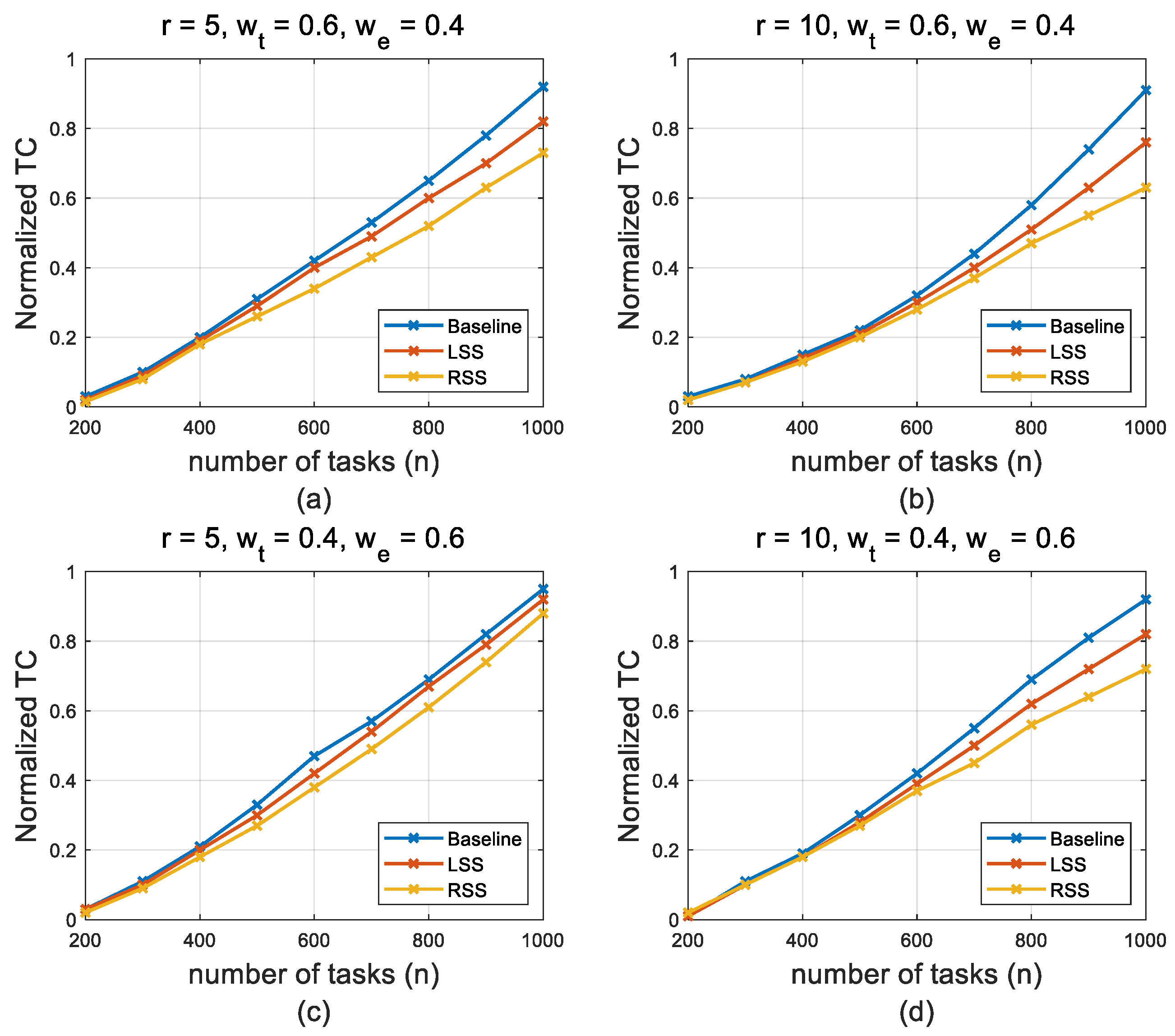
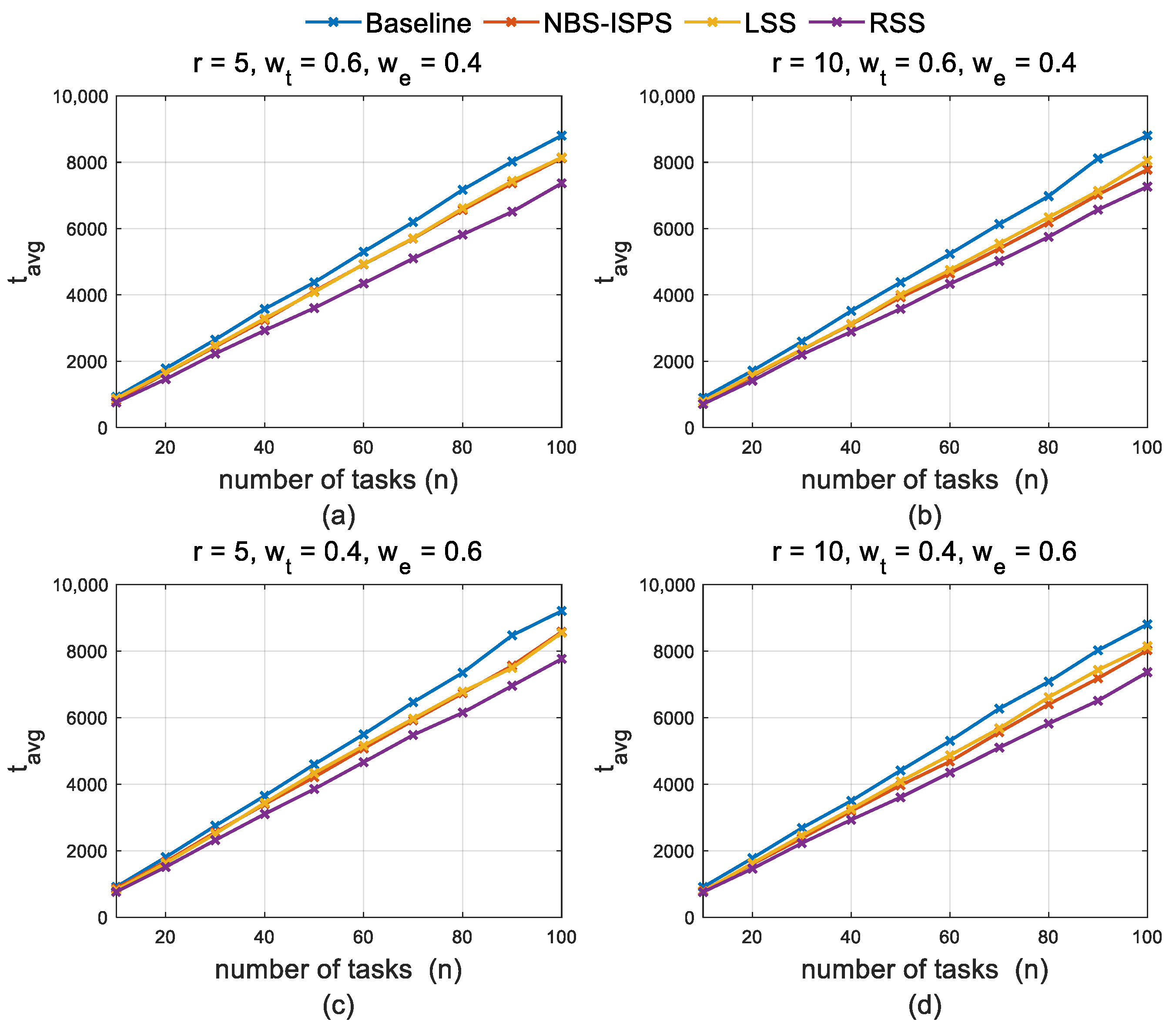
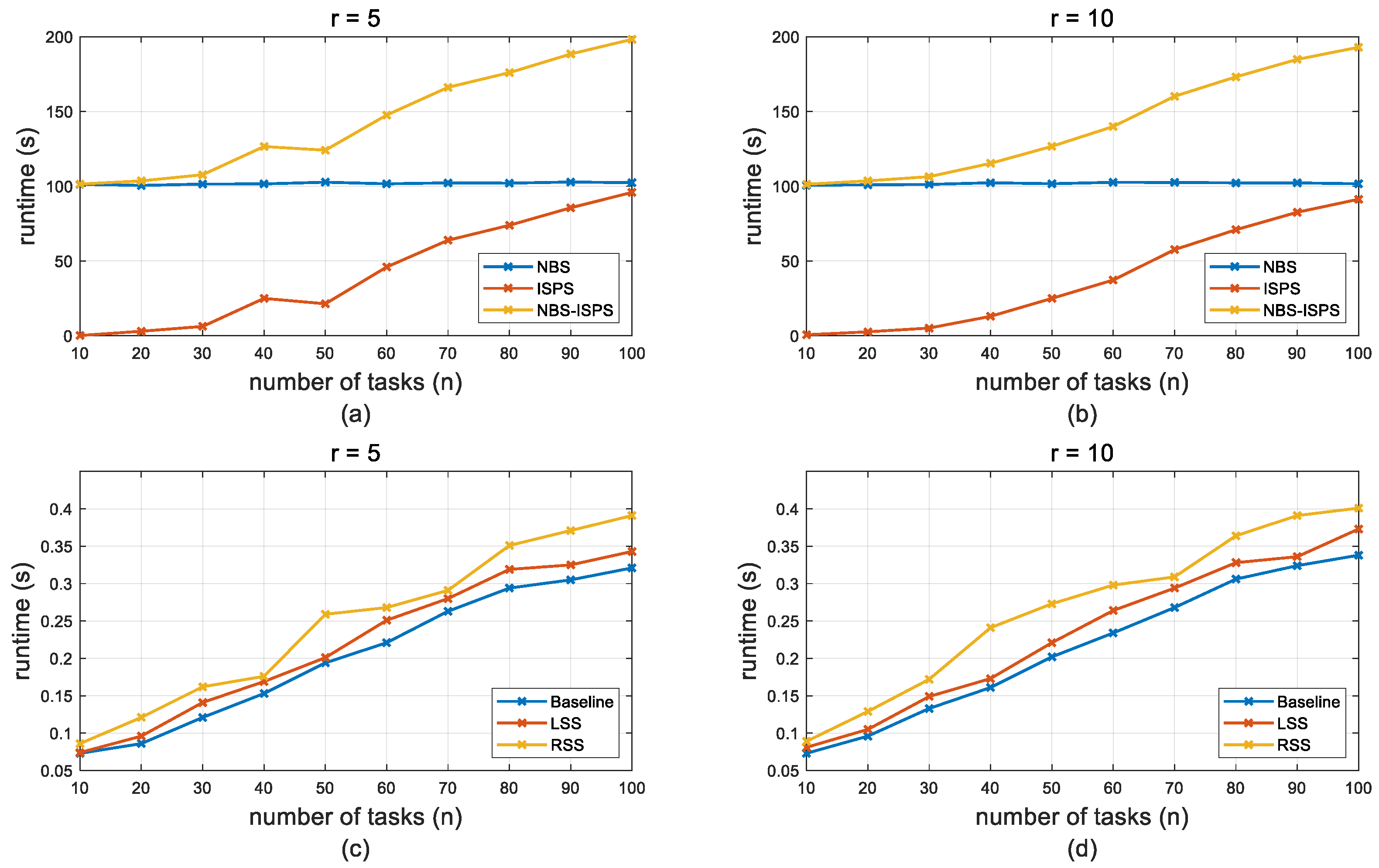
3.2.2. Analysis of Average Time Consumption
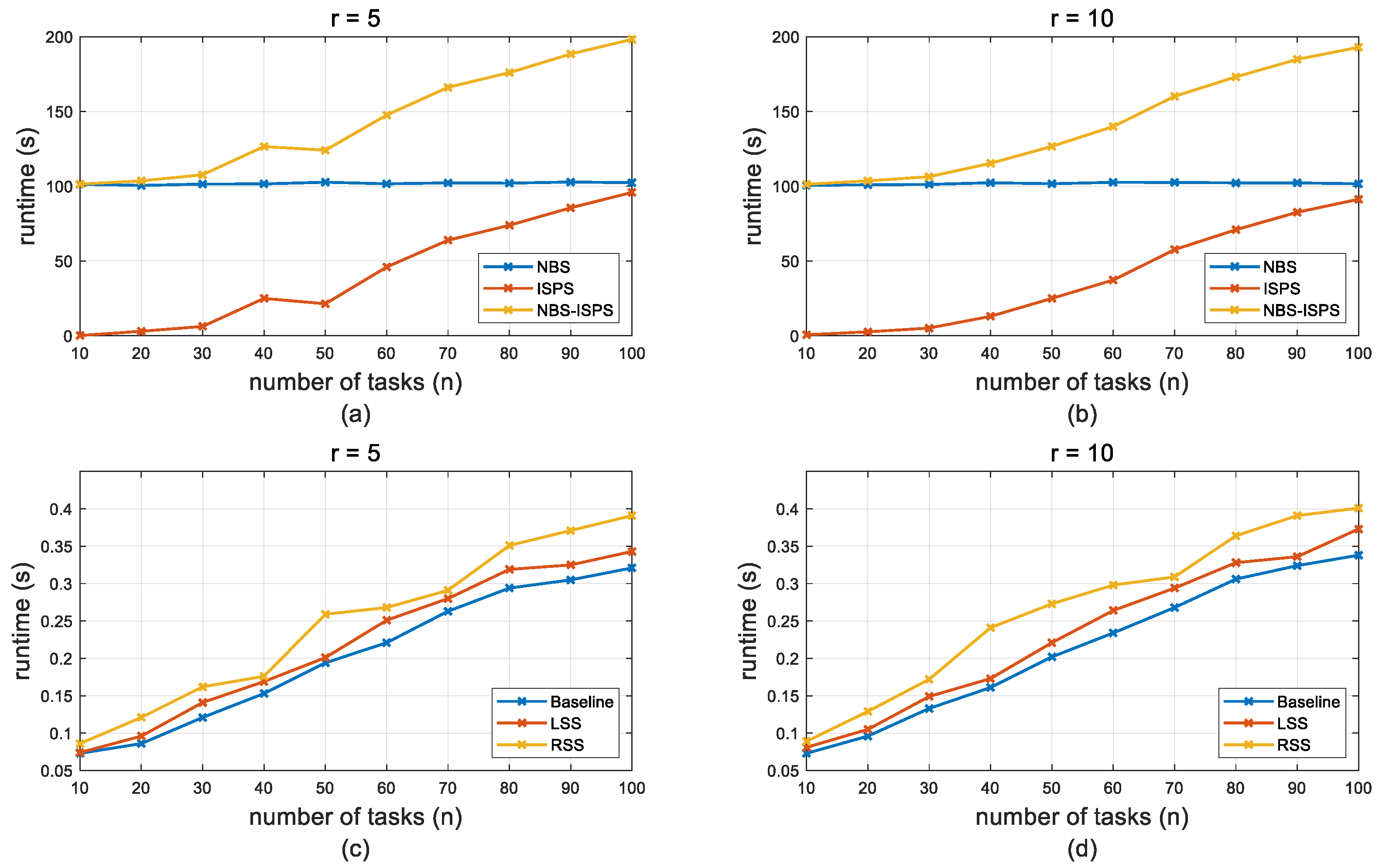
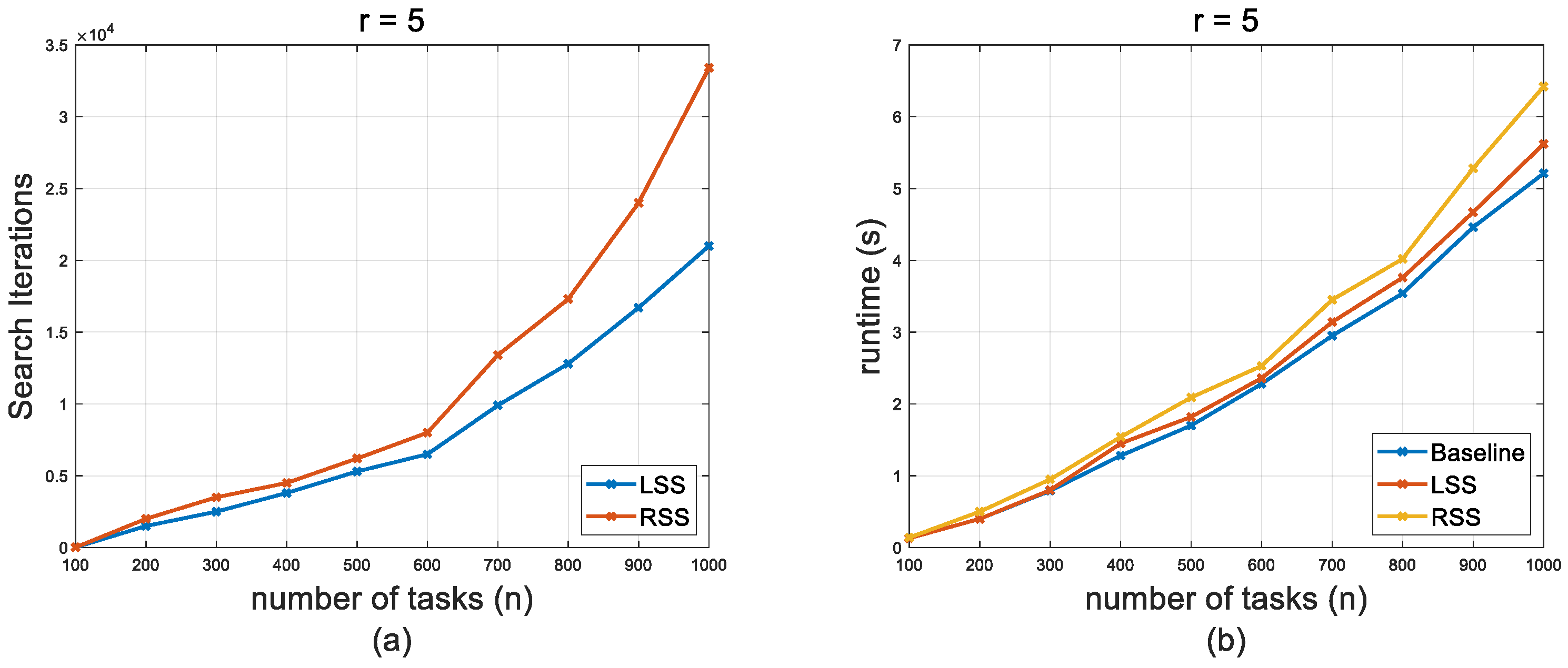
3.2.3. Runtime Analysis
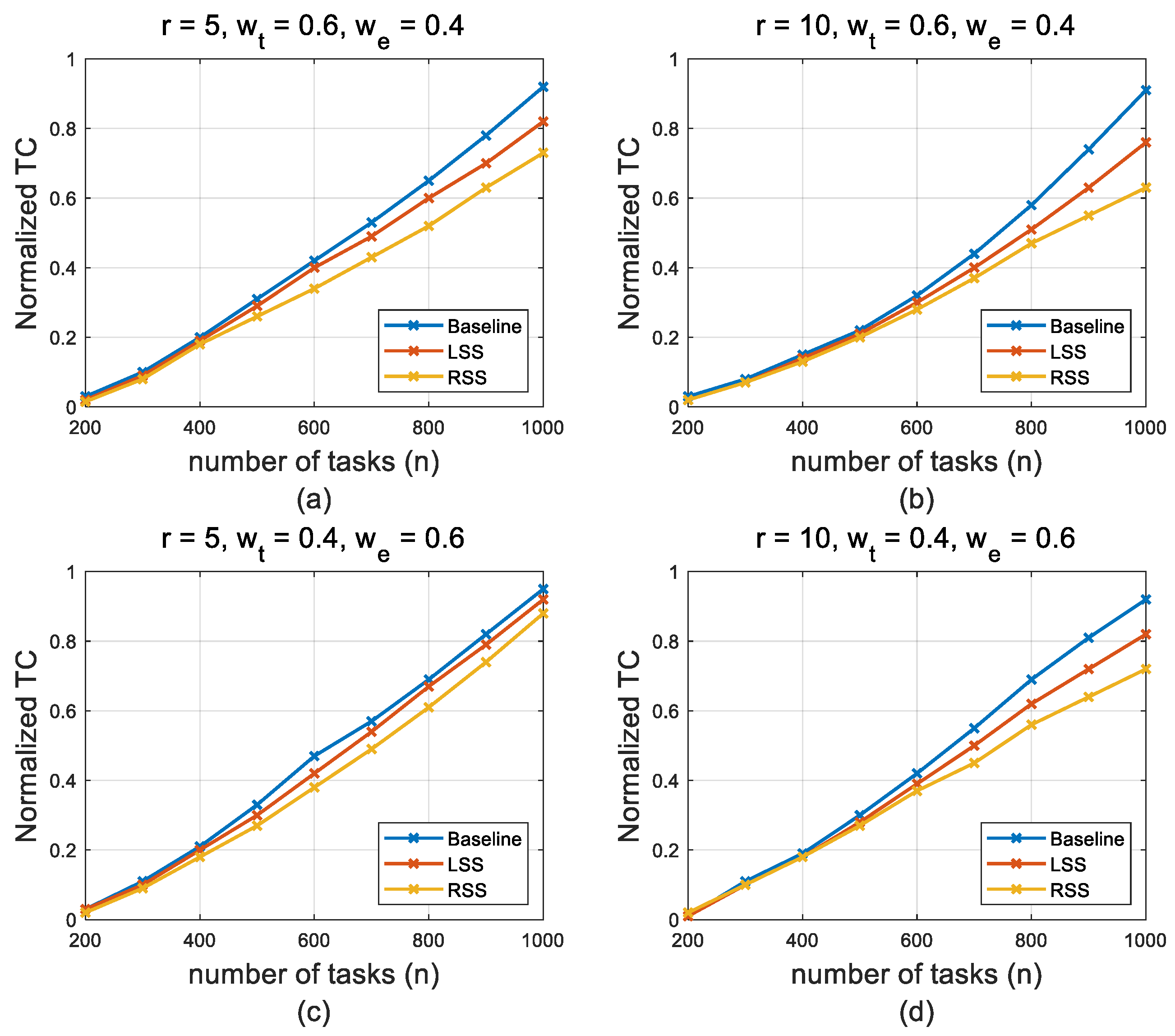
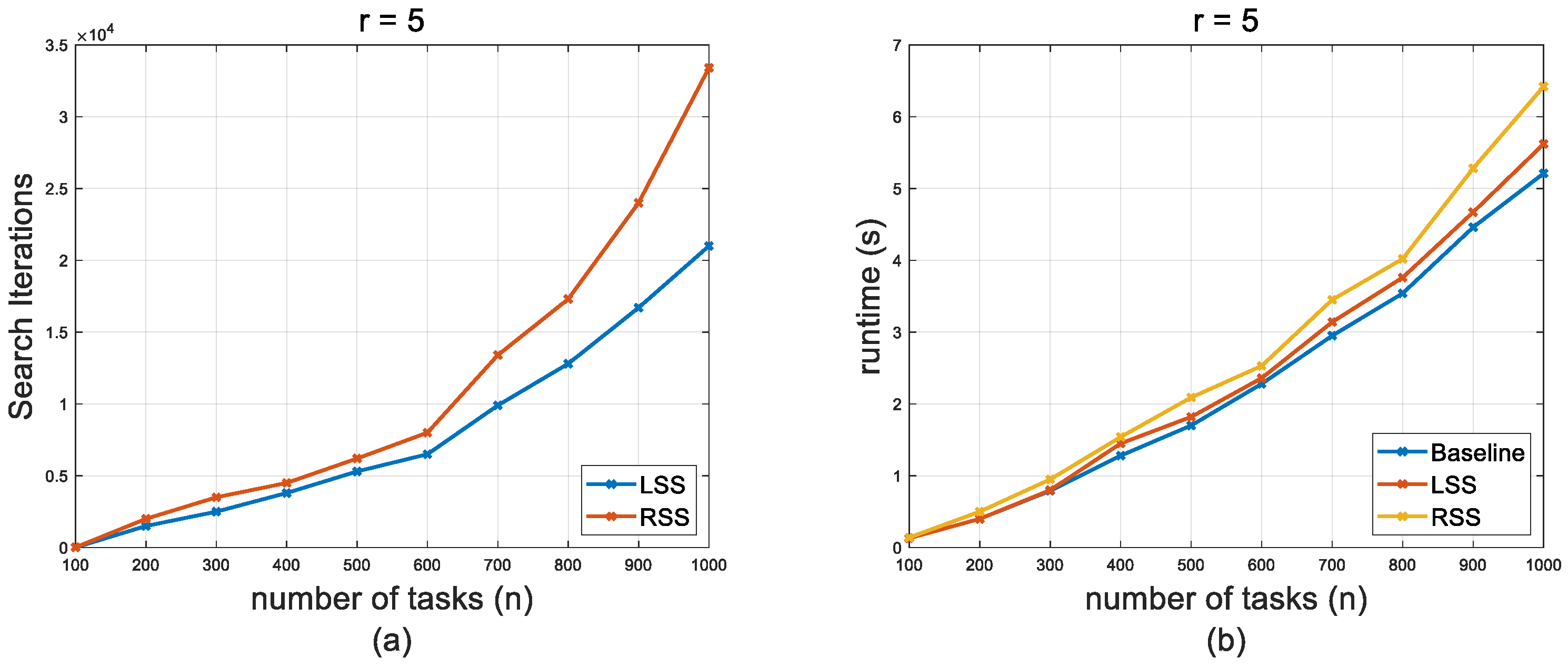
3.3. Feasibility Analysis with Large-Scale Problems
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Yadav, A.; Jayswal, S.C. Modelling of Flexible Manufacturing System: A Review. Int. J. Prod. Res. 2018, 56, 2464–2487. [Google Scholar] [CrossRef]
- Bogue, R. The Changing Face of the Automotive Robotics Industry. Ind. Robot Int. J. Robot. Res. Appl. 2022, 49, 386–390. [Google Scholar] [CrossRef]
- Bogue, R. The Role of Robots in the Electronics Industry. Ind. Robot Int. J. Robot. Res. Appl. 2023, 50, 717–721. [Google Scholar] [CrossRef]
- Brown, K.; Peltzer, O.; Sehr, M.A.; Schwager, M.; Kochenderfer, M.J. Optimal Sequential Task Assignment and Path Finding for Multi-Agent Robotic Assembly Planning. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 441–447. [Google Scholar]
- Saravanan, S.; Ramanathan, K.C.; MM, R.; Janardhanan, M.N. Review on State-of-the-Art Dynamic Task Allocation Strategies for Multiple-Robot Systems. Ind. Rob. 2020, 110, 52. [Google Scholar] [CrossRef]
- Lai, X.; Li, J.; Chambers, J. Enhanced Center Constraint Weighted A* Algorithm for Path Planning of Petrochemical Inspection Robot. J. Intell. Robot. Syst. 2021, 102, 78. [Google Scholar] [CrossRef]
- Stern, R. Multi-Agent Path Finding—An Overview. In Artificial Intelligence; Springer: Berlin/Heidelberg, Germany, 2019; pp. 96–115. [Google Scholar]
- Korsah, G.A.; Stentz, A.; Dias, M.B. A Comprehensive Taxonomy for Multi-Robot Task Allocation. Int. J. Rob. Res. 2013, 32, 1495–1512. [Google Scholar] [CrossRef]
- Bredstrom, D.; Rönnqvist, M. A Branch and Price Algorithm for the Combined Vehicle Routing and Scheduling Problem with Synchronization Constraints. NHH Department of Finance & Management Science Discussion Paper No. 2007/7. Available online: https://ssrn.com/abstract=971726 (accessed on 24 January 2024).
- Yu, J.; LaValle, S.M. Multi-Agent Path Planning and Network Flow. In Algorithmic Foundations of Robotics X; Springer: Berlin/Heidelberg, Germany, 2013; pp. 157–173. [Google Scholar]
- Yu, J.; LaValle, S.M. Optimal Multi-Robot Path Planning on Graphs: Structure and Computational Complexity. arXiv 2015, arXiv:1507.03289. [Google Scholar]
- Ma, H.; Wagner, G.; Felner, A.; Li, J.; Kumar, T.K.; Koenig, S. Multi-Agent Path Finding with Deadlines. arXiv 2018, arXiv:1806.04216. [Google Scholar]
- Bennewitz, M.; Burgard, W.; Thrun, S. Finding and Optimizing Solvable Priority Schemes for Decoupled Path Planning Techniques for Teams of Mobile Robots. Rob. Auton. Syst. 2002, 41, 89–99. [Google Scholar] [CrossRef]
- Erdem, E.; Kisa, D.G.; Oztok, U.; Schüller, P. A General Formal Framework for Pathfinding Problems with Multiple Agents. In Proceedings of the Twenty-Seventh AAAI Conference on Artificial Intelligence, Bellevue, WA, USA, 14–18 July 2013. [Google Scholar]
- Dai, M.; Tang, D.; Giret, A.; Salido, M.A. Multi-Objective Optimization for Energy-Efficient Flexible Job Shop Scheduling Problem with Transportation Constraints. Robot. Comput. Integr. Manuf. 2019, 59, 143–157. [Google Scholar] [CrossRef]
- Ham, A. Transfer-Robot Task Scheduling in Job Shop. Int. J. Prod. Res. 2021, 59, 813–823. [Google Scholar] [CrossRef]
- Fatemi-Anaraki, S.; Tavakkoli-Moghaddam, R.; Foumani, M.; Vahedi-Nouri, B. Scheduling of Multi-Robot Job Shop Systems in Dynamic Environments: Mixed-Integer Linear Programming and Constraint Programming Approaches. Omega 2023, 115, 102770. [Google Scholar] [CrossRef]
- Sharon, G.; Stern, R.; Felner, A.; Sturtevant, N.R. Conflict-Based Search for Optimal Multi-Agent Pathfinding. Artif. Intell. 2015, 219, 40–66. [Google Scholar] [CrossRef]
- Hönig, W.; Kiesel, S.; Tinka, A.; Durham, J.; Ayanian, N. Conflict-Based Search with Optimal Task Assignment. In Proceedings of the International Joint Conference on Autonomous Agents and Multiagent Systems, Stockholm, Sweden, 10–15 July 2018. [Google Scholar]
- Dasgupta, P.; Woosley, B. Multirobot Task Allocation with Real-Time Path Planning. In Proceedings of the Florida AI Research Society, St. Pete Beach, FL, USA, 22–24 May 2013. [Google Scholar]
- Chen, Z.; Alonso-Mora, J.; Bai, X.; Harabor, D.D.; Stuckey, P.J. Integrated Task Assignment and Path Planning for Capacitated Multi-Agent Pickup and Delivery. IEEE Robot. Autom. Lett. 2021, 6, 5816–5823. [Google Scholar] [CrossRef]
- Elfakharany, A.; Ismail, Z.H. End-to-End Deep Reinforcement Learning for Decentralized Task Allocation and Navigation for a Multi-Robot System. Appl. Sci. 2021, 11, 2895. [Google Scholar] [CrossRef]
- Tillman, F.A.; Cain, T.M. An Upperbound Algorithm for the Single and Multiple Terminal Delivery Problem. Manag. Sci. 1972, 18, 664–682. [Google Scholar] [CrossRef]
- Diana, M.; Dessouky, M.M. A New Regret Insertion Heuristic for Solving Large-Scale Dial-a-Ride Problems with Time Windows. Transp. Res. Part B Methodol. 2004, 38, 539–557. [Google Scholar] [CrossRef]
- Zheng, S.K.X.; Tovey, C.; Borie, R.; Kilby, P.; Markakis, V.; Keskinocak, P. Agent Coordination with Regret Clearing. In Proceedings of the AAAI Conference on Artificial Intelligence, Chicago, IL, USA, 13–17 July 2008; AAAI Press: Palo Alto, CA, USA, 2008; p. 101. [Google Scholar]
- Dohn, A.; Rasmussen, M.S.; Larsen, J. The Vehicle Routing Problem with Time Windows and Temporal Dependencies. Networks 2011, 58, 273–289. [Google Scholar] [CrossRef]
- Silver, D. Cooperative Pathfinding. In Proceedings of the AAAI Conference on Artificial Intelligence and Interactive Digital Entertainment, Marina Del Rey, CA, USA, 1–2 June 2005; Volume 1, pp. 117–122. [Google Scholar]
- Liu, S.; Feng, B.; Yu, D.; Bi, Y. An Integrated Task and Path Planning Approach for Mobile Robots in Smart Factory. In Proceedings of the ASME International Mechanical Engineering Congress and Exposition, Columbus, OH, USA, 30 October–3 November 2022; ASME: New York, NY, USA, 2022; Volume 2B, p. V02BT02A058. [Google Scholar]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, S.; Feng, B.; Bi, Y.; Yu, D. An Integrated Approach to Precedence-Constrained Multi-Agent Task Assignment and Path Finding for Mobile Robots in Smart Manufacturing. Appl. Sci. 2024, 14, 3094. https://doi.org/10.3390/app14073094
Liu S, Feng B, Bi Y, Yu D. An Integrated Approach to Precedence-Constrained Multi-Agent Task Assignment and Path Finding for Mobile Robots in Smart Manufacturing. Applied Sciences. 2024; 14(7):3094. https://doi.org/10.3390/app14073094
Chicago/Turabian StyleLiu, Shuo, Bohan Feng, Youyi Bi, and Dan Yu. 2024. "An Integrated Approach to Precedence-Constrained Multi-Agent Task Assignment and Path Finding for Mobile Robots in Smart Manufacturing" Applied Sciences 14, no. 7: 3094. https://doi.org/10.3390/app14073094
APA StyleLiu, S., Feng, B., Bi, Y., & Yu, D. (2024). An Integrated Approach to Precedence-Constrained Multi-Agent Task Assignment and Path Finding for Mobile Robots in Smart Manufacturing. Applied Sciences, 14(7), 3094. https://doi.org/10.3390/app14073094