1. Introduction
Offshore platform legs and ship exterior walls are essential parts of offshore engineering facilities, and their structural safety is crucial to the stability and safety of the entire facilities associated with them. Taking the pile leg of an offshore platform as an example, after being eroded by seawater and marine organisms being attached to it for a long time, its surface will gradually accumulate dirt and biological attachments, which will not only affect its appearance, but, more importantly, cause potential damage to the structure. These attachments will weaken the strength of the pile leg and increase its risk of breakage when impacted by natural forces, such as waves and currents. The pile legs of offshore platforms play a supporting and fixing role in offshore engineering facilities, and their operation efficiency directly affects the performance of the whole facilities. Dirt and organisms attached to a pile leg affect its thermal conductivity, resulting in reduced heat exchange efficiency between the pile leg and seawater. The accumulation of dirt and living organisms can also affect the finish of the pile leg, increasing the resistance of water flow and reducing its ability to resist wind and wave erosion. These problems will greatly reduce the life of offshore platform pile legs [
1].
Therefore, regular cleaning of marine pile legs is an important measure to ensure their structural safety. The cleaning work can remove corrosion products and biological attachments on the surface of pile legs, reduce the corrosion rate, and delay the aging and damage process. It can extend the service life of pile legs and reduce maintenance and replacement costs. Regular cleaning of marine pile legs can ensure that they are kept in good working condition, avoid various problems caused by the accumulation of dirt and organisms, and further improve the operating efficiency of the equipment.
At present, the cleaning of pile legs and outer walls of offshore platforms is still dominated by traditional manual methods. There are many problems with this mode of operation. First of all, workers carry out the cleaning work at high altitude, the risk factor is extremely high, and often there are equipment failures or workers are injured. Secondly, due to labor shortages and inefficiency, it is sometimes difficult to achieve the desired cleaning effects, resulting in a prolonged stay of cargo ships in port, increasing freight costs [
2].
The development of wall-climbing cleaning robots has become an effective solution to this problem. Such robots use ultrahigh-pressure water for cleaning, which can reach the upper part of a cargo hold that is difficult to reach manually, greatly improving cleaning efficiency. In addition, the use of these robots frees the rigging required for artificial high-altitude work and provides safety for workers. The robots are not only environmentally friendly, but also provide an efficient and viable solution for the cleaning and maintenance of the cabins of large cargo ships. Examples of the robots’ operating environments are shown in
Figure 1.
Song et al. [
3] proposed a wall-climbing robot that can be adsorbed on the wall of a steel structure. Due to the design and optimization of the suction characteristics of the magnetic adsorption component, it has a larger load bearing capacity and more flexible motion ability. Wang et al. [
4] proposed an amphibious hexapod robot with composite motor limbs which can move underwater with multiple degrees of freedom and climb stably on slopes of different gradients.
In Japan, Inoue et al. [
5] developed a small underwater crawling-type four-swing-arm robot. The robot is equipped with a track motor to drive the track and force arms on both sides of the track, which can also adjust the walking posture of the robot at will.
In 2018, the Central Scientific Laboratory in Nantes, France [
6], developed a crawler permanent-magnet wall-climbing robot which can withstand a payload of 100 kg and is mainly used for hull welding and hull surface information scanning. In 2019, La et al. [
7], in Australia, developed a four-wheel magnetic wall-climbing robot, which can not only move freely on a magnetic surface, but also carry out data collection and real-time monitoring, mainly using steel structures such as bridges for visual and 3D structural inspection. In 2020, Fukui [
8] developed HanGrawler, a wall-climbing robot that can not only travel at a high speed of 0.1 m/s on walls, but also withstand a load of 60 kg.
In 2021, Wang et al. [
9] developed a crawler wall-climbing robot, which can adapt to changes in wall curvature by adjusting its movement posture. In 2022, Hunan University and Hebei University of Technology jointly developed a magnetic caterpillar climbing robot applied to large cylindrical walls, which can withstand a payload of 75 kg and climb stably on a cylindrical wall [
10]. In 2022, Shanghai Jiao Tong University [
11] designed a wall-climbing robot with a double magnetic circuit based on a Halbach array to solve the maintenance problem of large pressure pipelines.
The LBF-300A, produced by Qingdao Luo Bofei Marine Technology Co., LTD., Qingdao City, China, is a piece of cable-controlled underwater detection equipment dedicated to strong current waters. It can be expanded to carry functional equipment, such as robot arms, USBLs, imaging sonars, etc., and has strong scalability and greatly improves the underwater operation capability of equipment [
12]. Qi Yuan technology is a company that makes underwater equipment. The Fifish T3 is a small, portable underwater vehicle that is fast and flexible. The T3 is also equipped with a 1-inch zoom wide-angle lens that supports 4K underwater shooting and can transmit content to the surface in real time [
13].
Based on the above research results, it can be seen that a complete control system and a strong adsorption walking mechanism are needed to meet the needs of robot hull inspection and other operations.
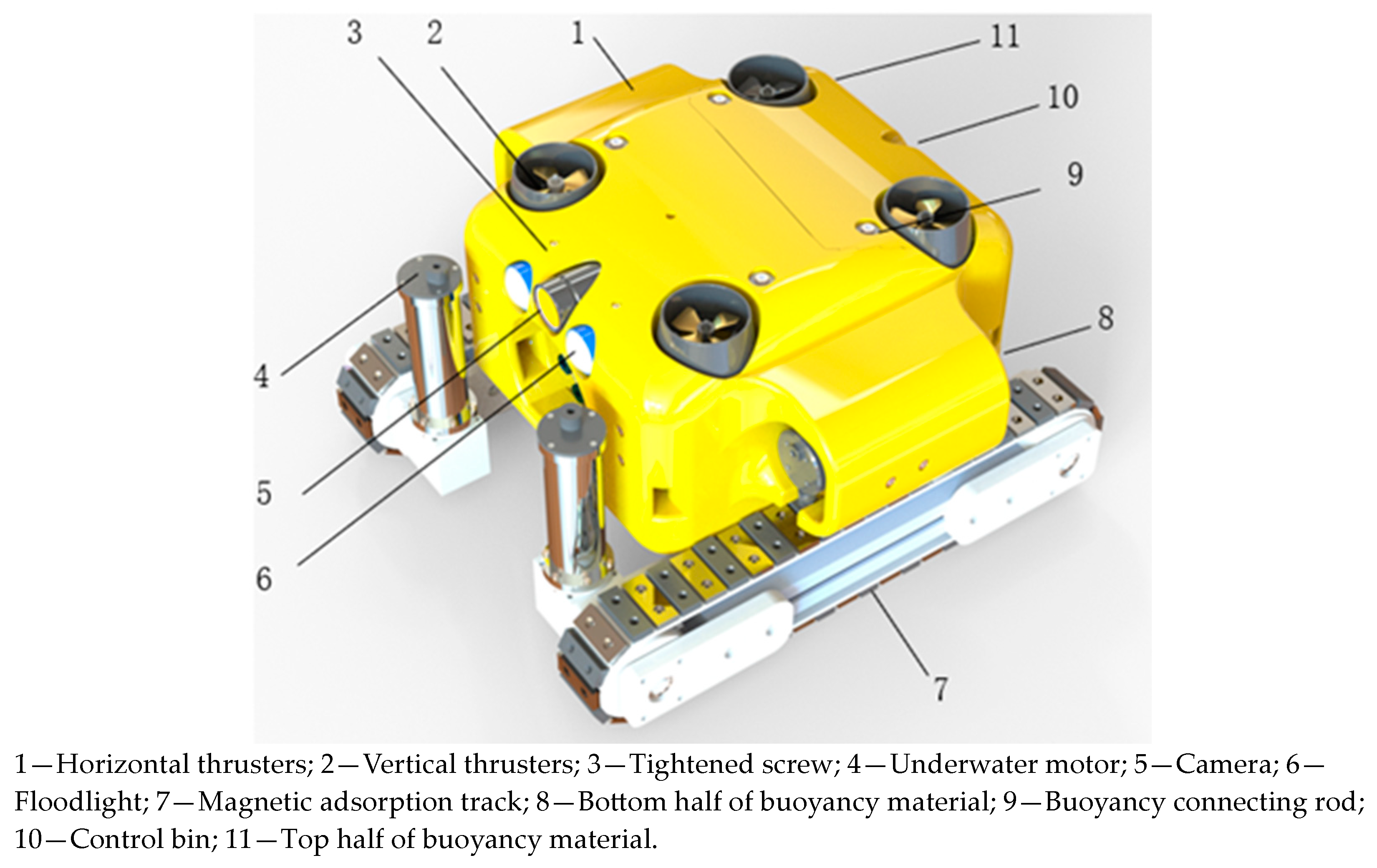
The products of the above research are not perfect for the operation tasks that exist both above and below water. In this paper, an amphibious robot that can operate both above and below the waterline was developed. The designed robot can be moved underwater by thrusters and can also be adsorbed on metal walls by tracks. At the same time, its external volume is designed to make it a small, portable mechanism, which is convenient for manual carrying and placing recovery. By installing a cleaning or detection device on the robot, it can provide an alternative to manual cleaning and detection, improve the detection efficiency and safety of metal wall surfaces on the water and underwater, and achieve the purpose of reducing costs and increasing efficiency.
The amphibious robot is equipped with a high-definition camera and a magnetic adsorption track with adaptive curved surfaces and can fully observe the jacket of an offshore platform above and below the waterline. The underwater depth and bow fixing function of the robot can stabilize the viewing angle and enable ideal shooting. In the detection of jackets of offshore platforms, the amphibious robot can use its underwater motion function to swim near a jacket and adsorb to the jacket through the magnetic adsorption track and crawl on the jacket through the robot track motion function. Due to the strong magnetic adsorption ability of the robot, it can crawl above the water surface for observation. Thus, it can complete the full range of observation functions above and below the water surface.
The design of the robot is equivalent to providing a working platform that can move up and down on the water surface. Based on the existing technology of the robot, it can be appropriately used with other working tools. At present, according to the experimental results of the robot, it can be verified that the robot has a good processing ability for the special working environment of offshore platform jackets.
3. Amphibious Robot Control System Design
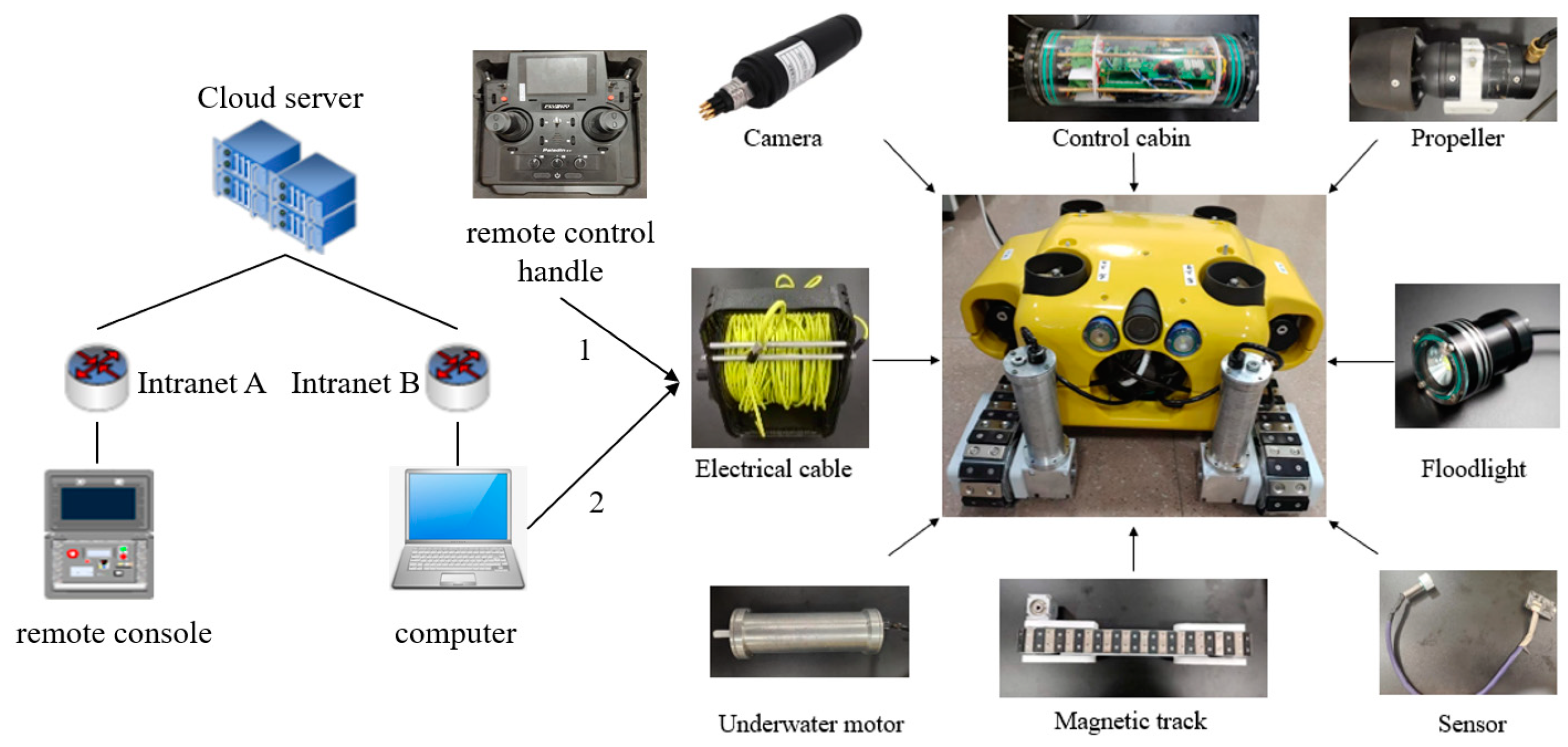
When the robot is subject to local remote control, the robot is controlled wirelessly by the Fuhs remote control, the channel resolution is 4090, and the data output can be PWM/PPM/i-BUS/S.US. The upper layer of the robot control system carries out command control, and the bottom layer carries out motion control. The ground control system includes a control handle, a portable power supply, a ground industrial computer, a cable, a carrier module, etc. The underwater robot body system mainly includes two underwater motors, six brushless DC motor thrusters, two underwater lights, and underwater cameras.
3.1. Hardware Design of Robot Control System
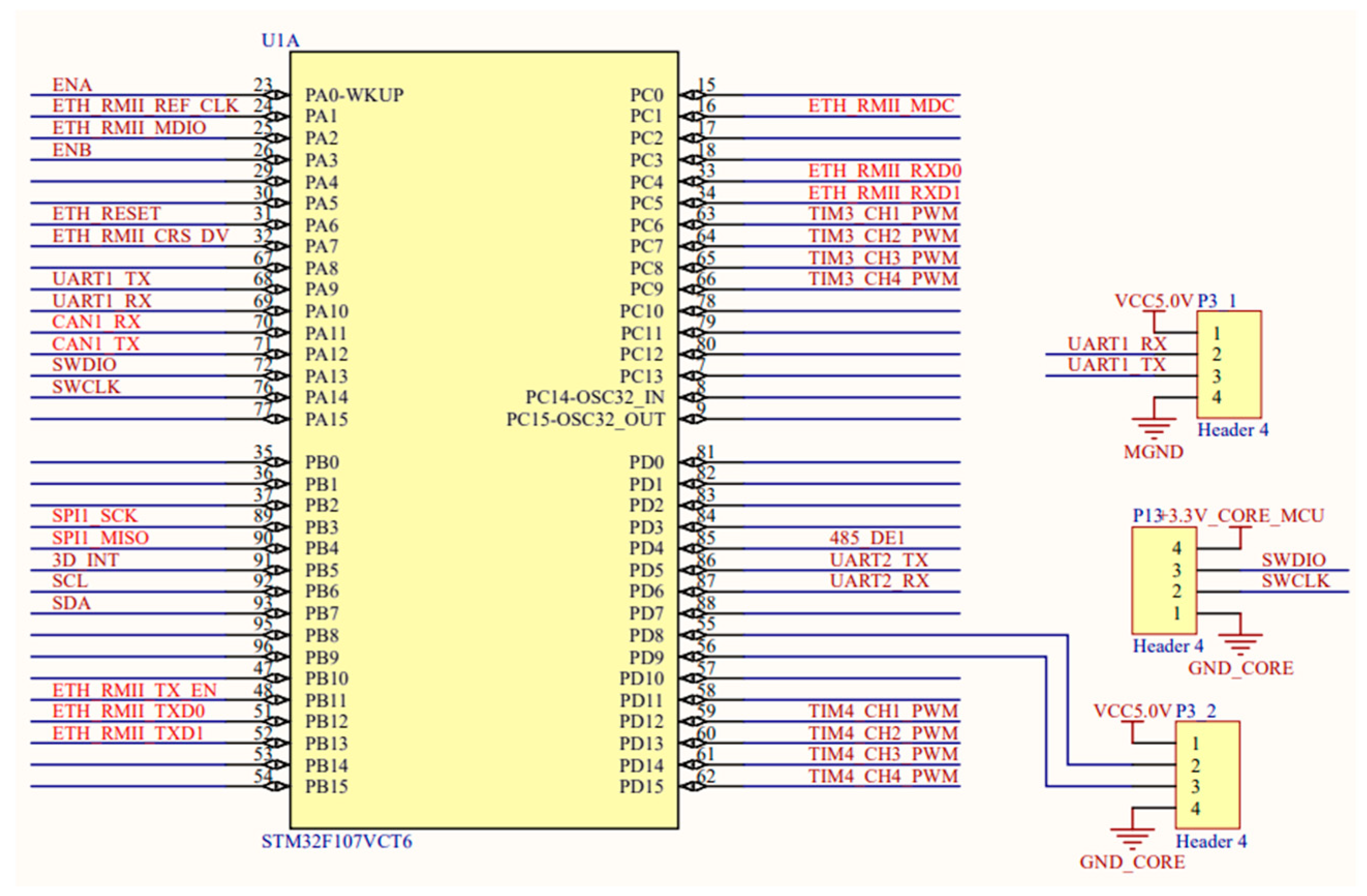
The robot master module uses the STM32F103VCT6 microcontroller, a high-performance ARM Cortex-M3 core operating at 72 MHz, high-speed embedded memory, up to 512 KB of internal flash memory, and up to 64 KB of SRAM, and it is equipped with a variety of peripheral resources, such as a IIC interface, a CAN bus, an SPI interface, a timer, a PWM timer, a 12-bit ADC, an enhanced IO port, etc. Its powerful performance can not only meet the needs of fast response and response stability in the robot control process, but also has the advantages of low power application development and low cost. A circuit diagram of the main control module is shown in
Figure 10.
The RS-485 module is a serial communication module whose role is to achieve communication between multiple nodes so that different devices can share a pair of lines for data communication. The Modbus communication protocol based on RS-485 is used in the control motherboard of the upper and lower computer of the portable modular underwater robot. The host computer can not only send control commands to the underwater control motherboard through RS-485, but also read status information, such as serial port data collected by the underwater control motherboard, in real time. A circuit diagram of the RS-485 module is shown in
Figure 11.
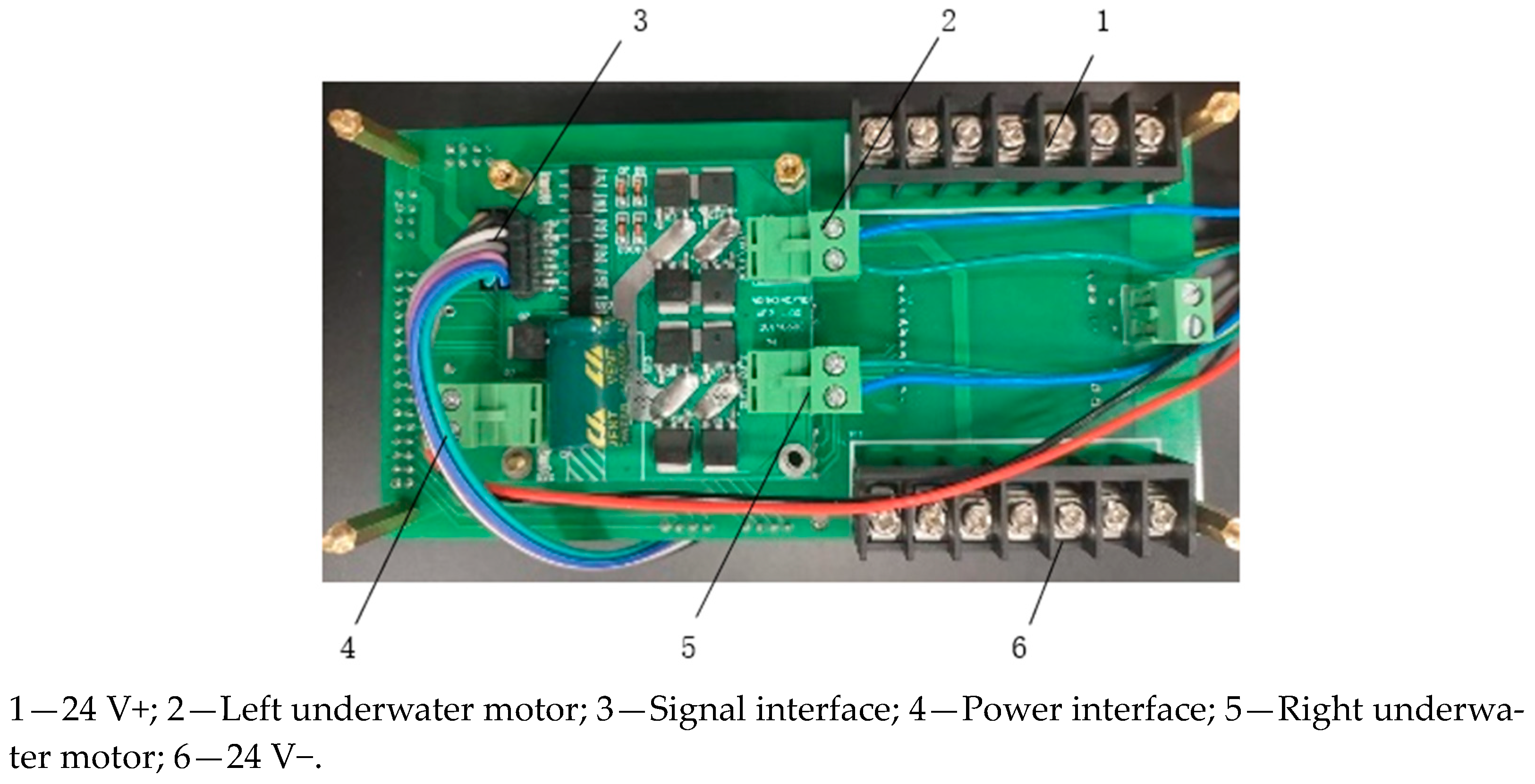
The control motherboard plays an important role in the information interaction and command transmission of the robot in the process of movement. The motherboard integrates the 24 V power supply module for the thruster, the CAN communication module for the thruster, the RS-485 module for the communication between the sensor and the main control chip, and the depth sensor and other interface modules. A physical diagram of the control motherboard is shown in
Figure 12.
3.2. Robot Control System Software Design
The robot’s control system software mainly includes a multi-task scheduler based on the RTOS operating system (lower computer) [
20], bootloader remote upgrade software, Modbus poll remote control software (the version number is 9.2.2.1343), and a control handle (upper computer). The program of the lower computer is mainly used to read various sensor data and carry out motion control of the robot, while the upper computer can visually display various data collected in the control window [
21]. The upper computer and the lower computer can interact with data in real time to facilitate manual control of the robot.
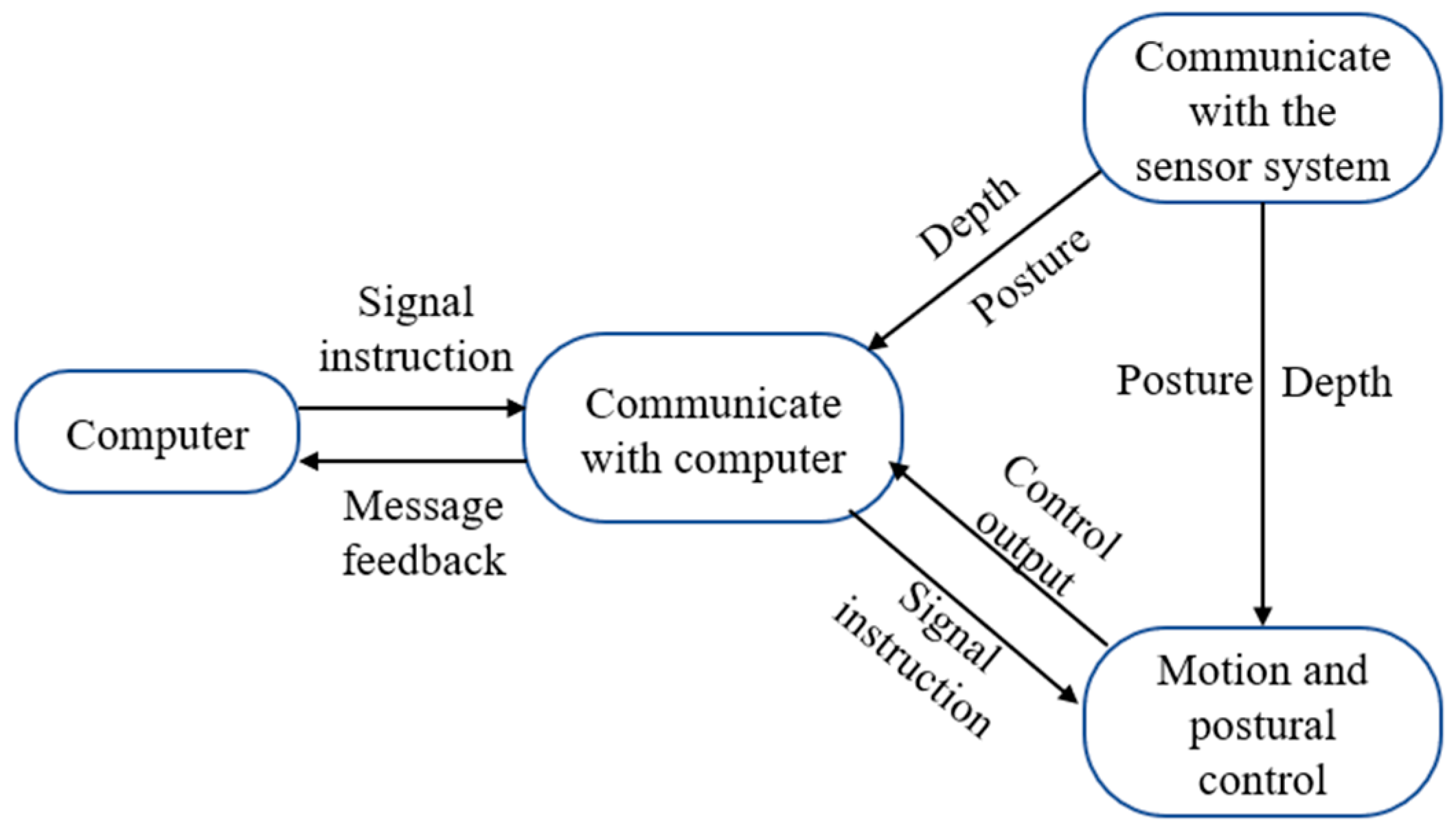
The multi-task scheduling of the robot based on the RTOS operating system can ensure the real-time control and reliability of the system, which can be roughly divided into three threads: the control board to collect sensor system data, the robot motion and attitude control task, and the communication task between the control board and the ground industrial computer. A schematic diagram of multi-task scheduling based on RTOS is shown in
Figure 13.
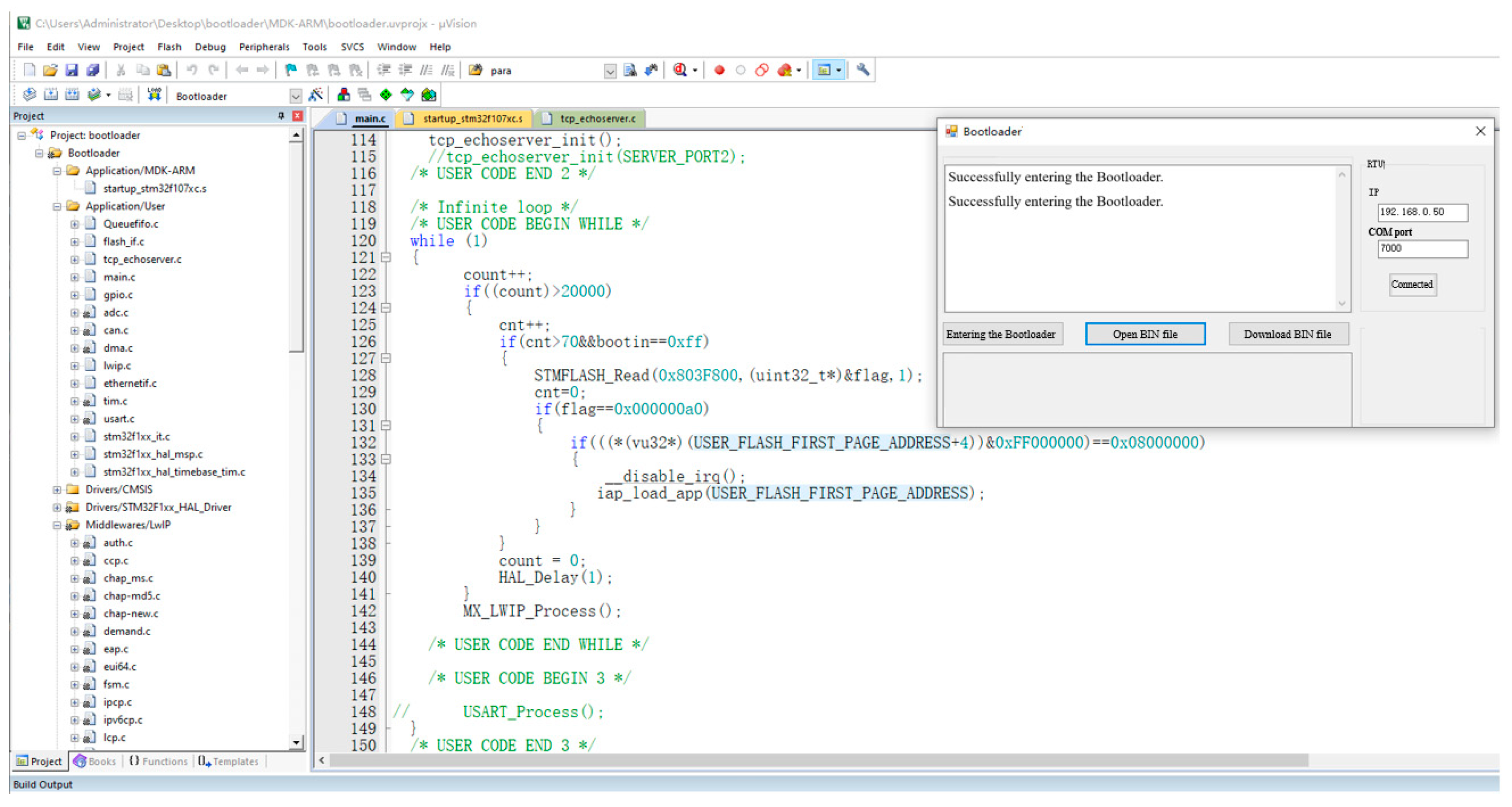
When the control motherboard is installed in the robot control cabin, the electronic bin is repeatedly disassembled to prevent the upgrade of the program in the motherboard, so the bootloader is used to remotely upgrade the robot control motherboard, and the program is downloaded to the chip using the local area network. The bootloader download program interface is shown in
Figure 14.
The control board chip is STM32F103VCT6, and the internal flash can be divided into three parts. The bootloader is the first part of the program. Before running the second part of the main program, the bootloader program is entered first. At this time, the bootloader is opened to download the application, and then the IP information of the main control board is input to establish the connection between the control board and the computer. When the current computer receives the command of the remote upgrade application code, the system uses the software to reset and erase the flash area of the remote upgrade application code. Finally, through the bootloader program, the obtained program file of the remote upgrade application is downloaded to the corresponding flash address, and the settings are directly entered into the application after the upgrade is completed. The purpose of remotely updating the program within the control board can be accomplished here.
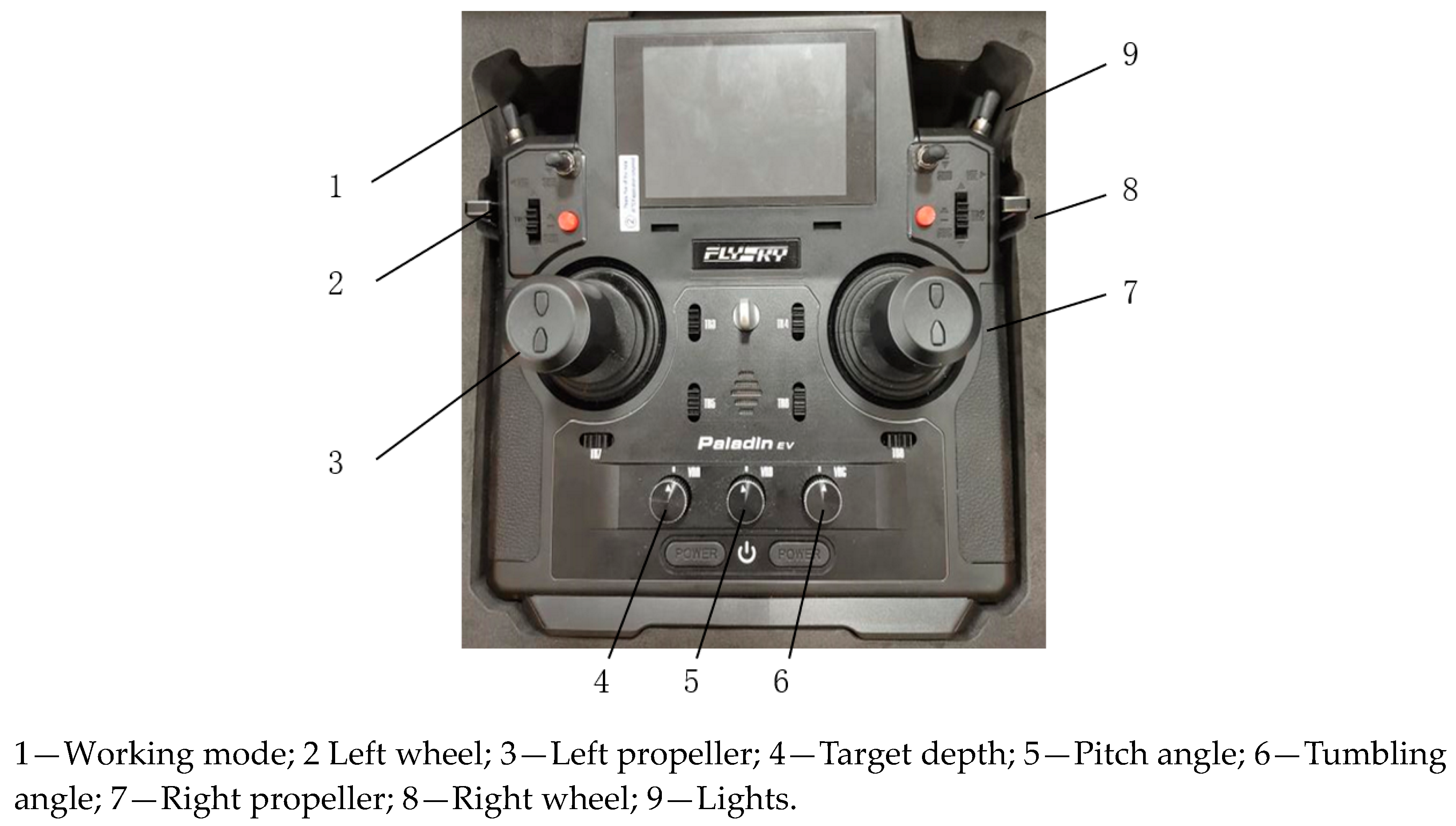
For local remote control, Fusi remote control is used to control the robot in real time, and its control distance can reach more than 300 m, using the AFHDS 3 wireless protocol. The receiver of the remote control is connected to the carrier module on the water, and then the communication signal of the receiver is converted into the TCP/IP protocol of the same network as the power carrier module. A physical picture of the control handle is shown in
Figure 15. Modbus is a serial communication protocol [
22], which is widely used in industrial automation systems and supports various communication modes, such as traditional RS-232, RS-485, and Ethernet. The Modbus RTU mode is selected according to the amount of communication data [
23].
6. Amphibious Robot Experiment
In order to verify the rationality of an amphibious robot design, two groups of experiments need to be designed: 1. to determine the robot’s motion and attitude control effect under water; 2. to determine that the robot stably adsorbs on metal walls above and below the waterline.
6.1. Robot Underwater Motion Control Test
Robot underwater motion control can also directly modify the working mode through the Modbus poll control software to complete specific work tasks, such as depth setting, cruise, etc. The data collected by gyroscope can be displayed in real time by the Modbus poll software. An experimental diagram of robot movement and underwater shooting is shown in
Figure 22. The robot can move forward and backward, turn, float up and dive down, and flip over normally.
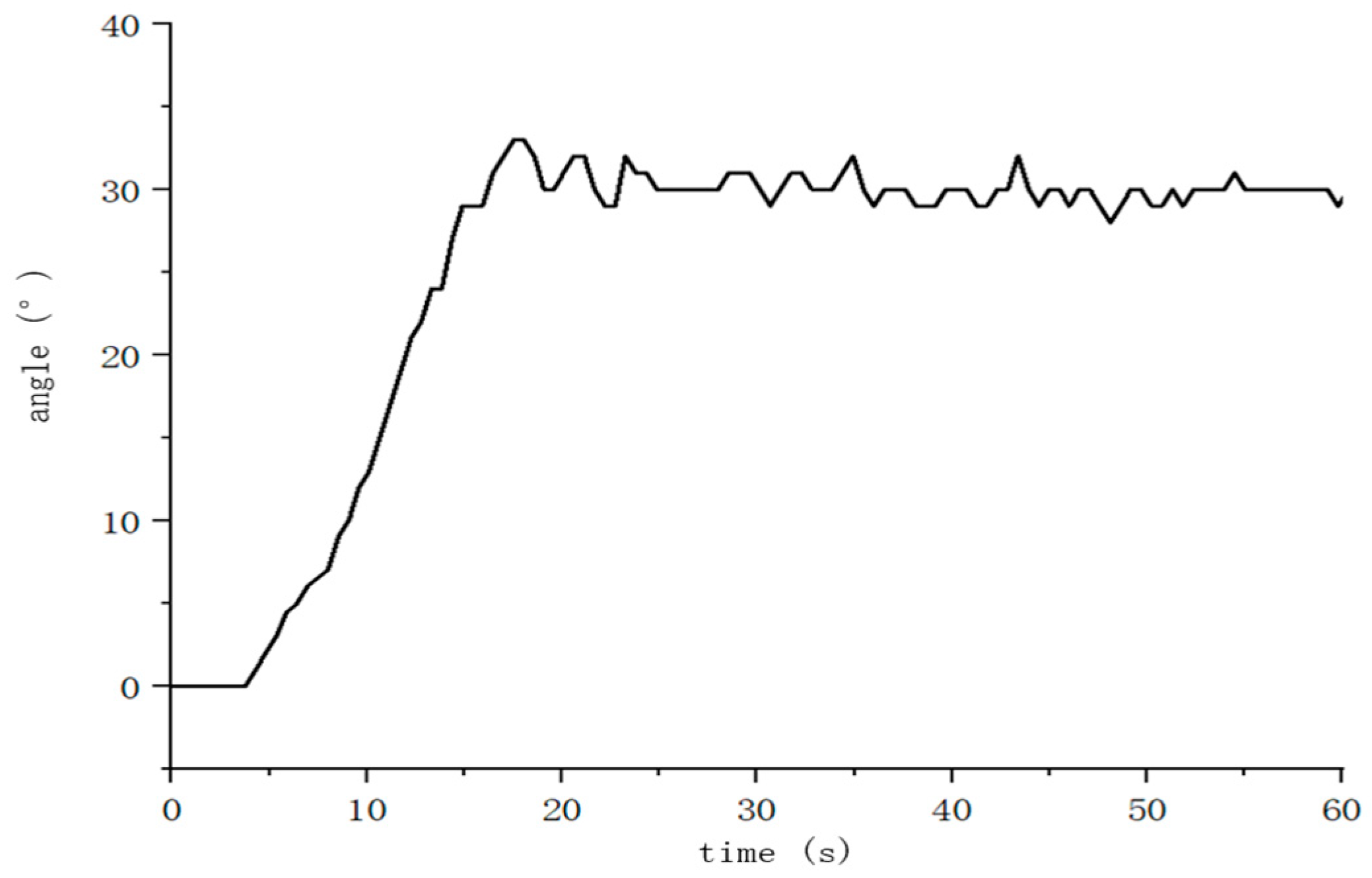
In order to test the real control performance of the robot control system, a fixed depth of 0.5 m and a fixed bow of 30° were set for control tests. The depth control uses the depth sensor, and the heading control uses the gyroscope to collect and feedback information. The change curves of the two experimental angles are shown in
Figure 23 and
Figure 24.
In the depth control experiment, when the robot was suspended in water, the initial depth was 0 m. After waiting for 4 s, the robot was controlled to dive, and the diving depth gradually increased until it reached 0.5 m, and then it stably hovered in the water. The response time of the robot was short and there was no big jitter, and the control effect was good.
In the constant heading control experiment, the initial heading angle of the robot was adjusted to 0°, and the robot was controlled to turn after 4 s. The heading angle gradually increased, and the robot stably hovered in the water after reaching 30°. During the whole movement, the robot ran smoothly. The above experimental results show that the designed robot attitude control system has good control performance.
By comparing the experimental data with the simulation results, it can be seen that the experimental results are in good agreement with the simulated results of the calculated transfer function, and the time from receiving the instruction to making the response action to reaching the target result is about 13 s, and the overshoot is low. The transfer function shows the feasibility of the robot control system, and the experimental data demonstrate the correctness of the transfer function.
6.2. Robot Wall-Climbing Test
Considering actual situations, the diameter of the jacket of an offshore platform is generally relatively large. Due to the small size of the amphibious robot designed, the robot can be regarded as having a curved surface with an infinite diameter, that is, the robot action scene is regarded as a plane. However, due to the limitations of the conditions, the simulation experiment for the robot’s function was carried out in a pool. However, such experiments can still normally reflect the practicality of amphibious robot functions.
The amphibious robot was tested on a metal wall consisting of Q235 material and with a thickness of 5 mm to check its climbing performance. The wall-climbing process of the robot is shown in
Figure 25. During the test, the robot could stably adsorb on the metal wall and successfully complete basic movements, such as forward, backward, and turning movements, meeting the test requirements.
7. Conclusions
An amphibious robot has been developed that can perform tasks above and below the waterline. The robot model was established, then a static analysis was carried out, and suitable permanent magnets were selected by magnetic simulation software. The robot can also adapt to metal walls and climb stably. With STM32 as the core, the integrated control system of the robot was established, and the underwater dynamics of the robot were modeled. The experiment proves that the amphibious robot can realize attitude and motion control in water, and its control system can satisfy the basic control ability. The amphibious robot has realized the requirement of working above and below the waterline with metal walls, and the results show that it can be used in amphibious operations, such as those involving pile legs of offshore platforms and outer walls of ships, providing great help in underwater safety operations.
At present, there are few amphibious robots capable of operating above and below the waterline, and the portable magnetic adsorption amphibious robot has the advantage of crawling on metal walls compared with the underwater robots on the market, and it can be installed with different operations in later stages for fully specified tasks. However, compared with more mature robots, the amphibious robot’s control system needs to be optimized, and there are some problems, such as the long control reaction time and deviation with respect to accurate positioning. For the design, in order to further optimize the frame structure, it is necessary to reduce the center of gravity of the robot, reduce the volume and weight, effectively reduce the force of water flow on the robot, and give full play to the propulsion ability of the propeller. In addition, it is also necessary to adjust the layout of the buoyancy material to ensure that the center of gravity of the body and the center of buoyancy are on the same axis as far as possible when the robot climbs a wall vertically.
The portable magnetic adsorption amphibious robot not only has the ability to work underwater, but can also work on metal walls on the water, and the amphibious robot has the ability to automatically adapt to curved surfaces and can stably crawl on most of the curvatures of walls. In the future, based on this amphibious robot, a working robot with a more reasonable structure and a more perfect control system can be designed. For example, the amphibious robot can be used for testing operations on specific occasions by installing a testing mechanism. When a cleaning device is installed, it can be used for cleaning operations on other devices, etc.


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}