
Stable Heteroclinic Channel-Based Movement Primitives: Tuning Trajectories Using Saddle Parameters


Abstract
Featured Application
Abstract
1. Introduction
- Vary the system parameters to change waveform frequencies, magnitudes, and shapes, which will
- change the produced trajectory’s speed, precision, and/or shape.
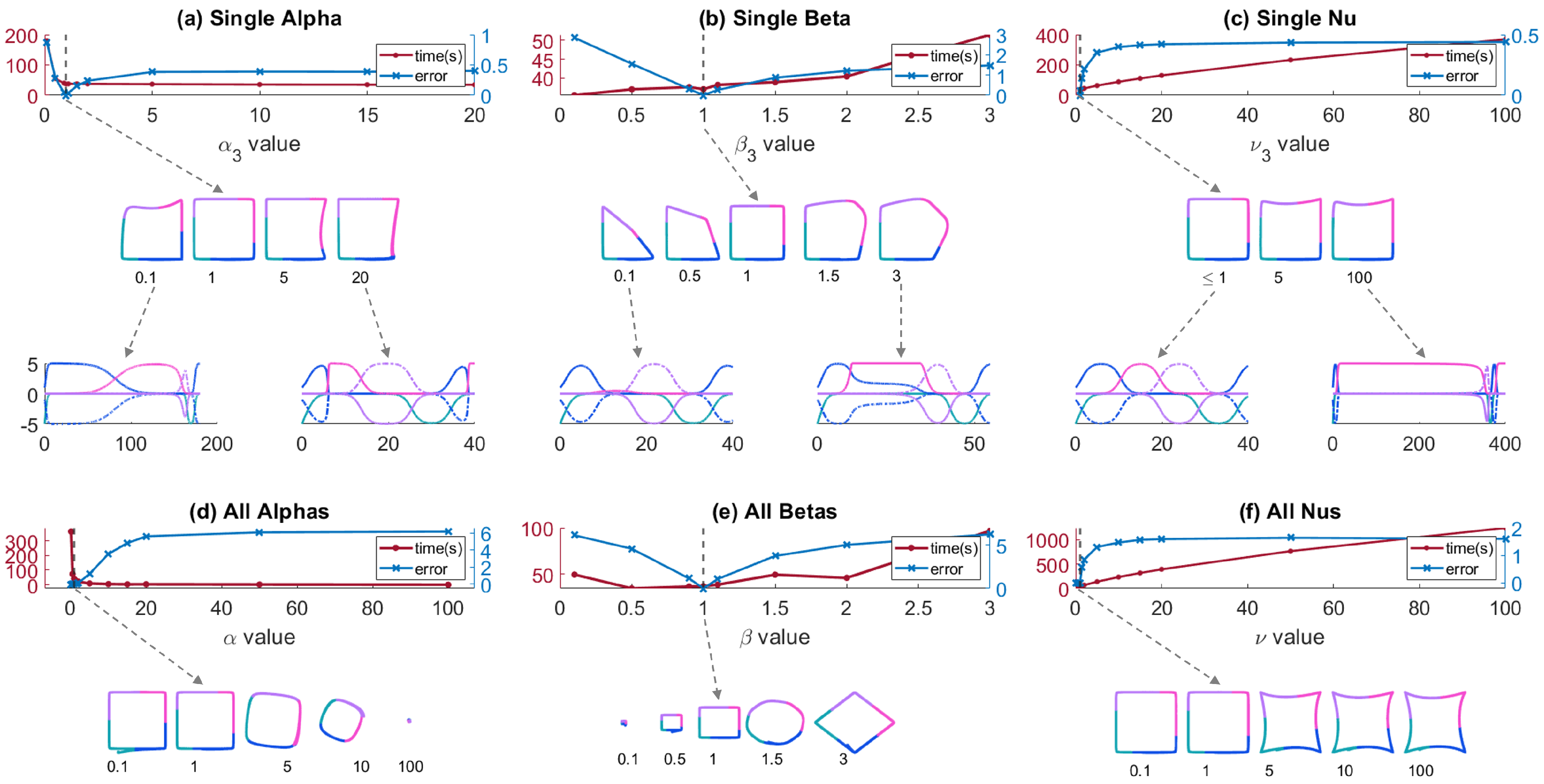
- The saddle value, ν, is the optimal modifier to prescribe trajectory precision.
2. Relevant Work
3. Methods
3.1. System Model
3.2. System Parameters
3.3. Desired Trajectories
3.3.1. Square
- ;
- ;
- ;
- ;
- ;
- ;
- .
3.3.2. Number “3” Shape
3.4. Evaluating the Produced Trajectories
- Collective parameter change: or or ;
- Individual parameter change: a single , or .
4. Results
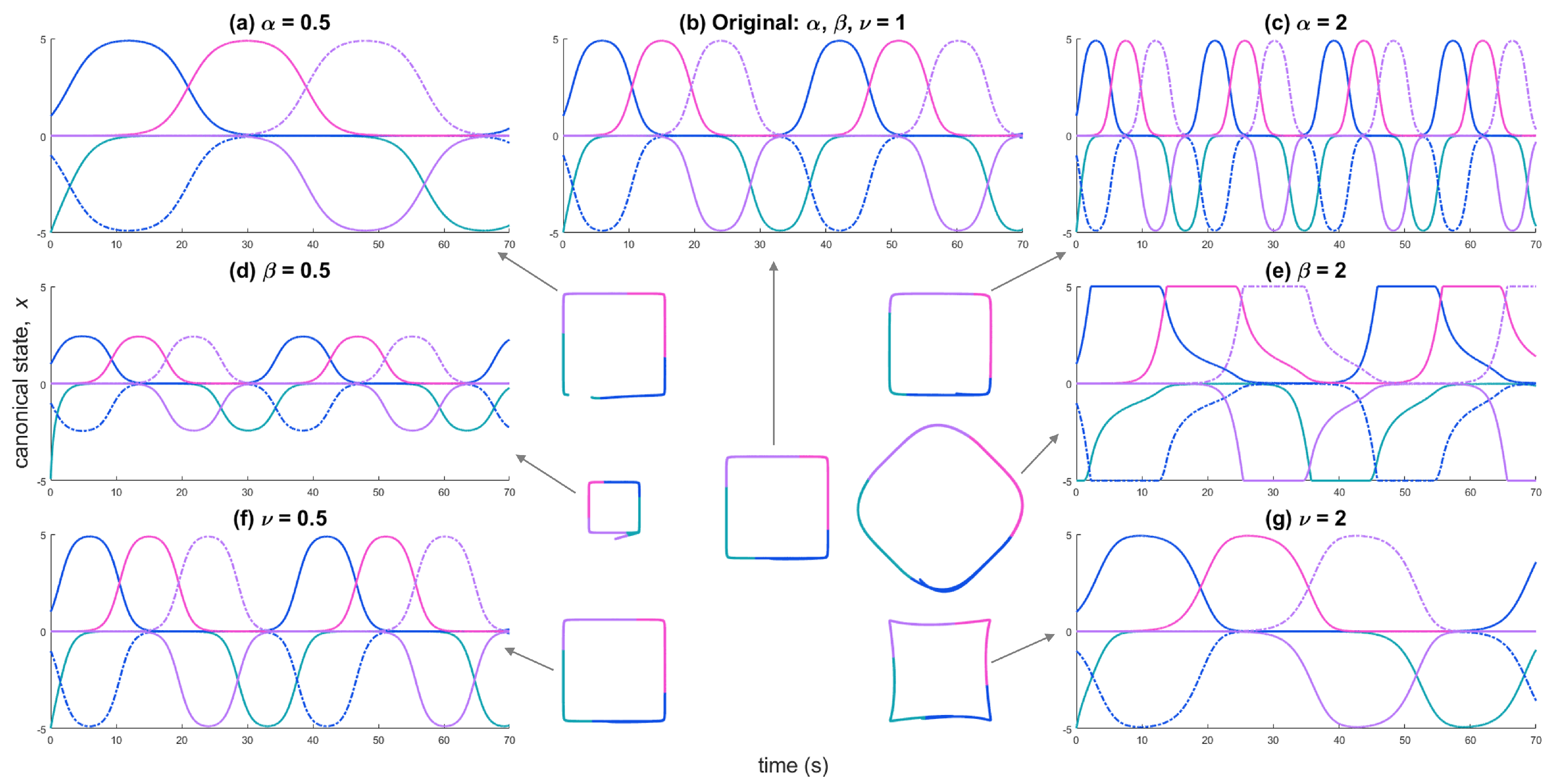
4.1. Alpha: Growth Rate
4.1.1. All Alpha
4.1.2. Single Alpha
4.2. Beta: Magnitude
4.2.1. All Beta
4.2.2. Single Beta
4.3. Nu: Insensitivity to Noise
4.3.1. All Nu
4.3.2. Single Nu
4.4. Complex Trajectory Tuning
5. Discussion
6. Conclusions
- We tuned state-to-state trajectories of a saddle point-based control system by varying the parameters associated with each state, without jeopardizing the stability of the system at large.
- We reduced the distance error of a complex trajectory (number “3” shape) by 32% by locally tuning the trajectory after it was initialized.
- We identified that the saddle value may be the ideal tool for SMP trajectory tuning because it produces predictable results when it is varied over 3 orders of magnitude.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| SMP | Stable heteroclinic channel-based movement primitive |
| DMP | Dynamic movement primitive |
| SHC | Stable heteroclinic channel |
| DOF | Degrees of freedom |
References
- Rouse, N.A.; Daltorio, K.A. Visualization of Stable Heteroclinic Channel-Based Movement Primitives. IEEE Robot. Autom. Lett. 2021, 6, 2343–2348. [Google Scholar] [CrossRef]
- Guckenheimer, J.; Holmes, P. Structurally stable heteroclinic cycles. Math. Proc. Camb. Philos. Soc. 1988, 103, 189–192. [Google Scholar] [CrossRef]
- Krupa, M. Robust Heteroclinic Cycles. J. Nonlinear Sci. 1997, 7, 129–176. [Google Scholar] [CrossRef]
- Bick, C.; Rabinovich, M.I. On the occurrence of stable heteroclinic channels in Lotka–Volterra models. Dyn. Syst. 2010, 25, 110–197. [Google Scholar] [CrossRef]
- Voit, M.; Meyer-Ortmanns, H. Dynamical Inference of Simple Heteroclinic Networks. Front. Appl. Math. Stat. 2019, 5, 63. [Google Scholar] [CrossRef]
- Ashwin, P.; Postlethwaite, C. Designing Heteroclinic and Excitable Networks in Phase Space Using Two Populations of Coupled Cells. J. Nonlinear Sci. 2016, 26, 345–364. [Google Scholar] [CrossRef]
- Horchler, A.D.; Daltorio, K.A.; Chiel, H.J.; Quinn, R.D. Designing responsive pattern generators: Stable heteroclinic channel cycles for modeling and control. Bioinspiration Biomim. 2015, 10, 026001. [Google Scholar] [CrossRef] [PubMed]
- Schaal, S.; Kotosaka, S.; Sternad, D. Nonlinear Dynamical Systems as Movement Primitives. Int. Conf. Humanoid Robot. Camb. MA 2001, 38, 117–124. [Google Scholar] [CrossRef]
- Schaal, S.; Peters, J.; Nakanishi, J. Control, planning, learning, and imitation with dynamic movement primitives. Workshop Bilater. Paradig. Hum. Humanoids IEEE Int. Conf. Intell. Robot. Syst. (IROS 2003) 2003, 1–21. [Google Scholar]
- Wang, R.; Wu, Y.; Chan, W.L.; Tee, K.P. Dynamic Movement Primitives plus: For enhanced reproduction quality and efficient trajectory modification using truncated kernels and local biases. In Proceedings of the IEEE International Conference on Intelligent Robots and Systems, Daejeon, Republic of Korea, 9–14 October 2016; pp. 3765–3771. [Google Scholar] [CrossRef]
- Koutras, L.; Doulgeri, Z. A novel DMP formulation for global and frame independent spatial scaling in the task space. In Proceedings of the 29th IEEE International Conference on Robot and Human Interactive Communication, RO-MAN 2020, Naples, Italy, 31 August–4 September 2020; pp. 727–732. [Google Scholar] [CrossRef]
- Kong, L.H.; He, W.; Chen, W.S.; Zhang, H.; Wang, Y.N. Dynamic Movement Primitives Based Robot Skills Learning. Mach. Intell. Res. 2023, 20, 396–407. [Google Scholar] [CrossRef]
- Rabinovich, M.; Huerta, R.; Laurent, G. Transient dynamics for neural processing. Science 2008, 321, 48–50. [Google Scholar] [CrossRef]
- Daltorio, K.A.; Horchler, A.D.; Shaw, K.M.; Chiel, H.J.; Quinn, R.D. Stable Heteroclinic Channels for Slip Control of a Peristaltic Crawling Robot. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Lepora, N., Mura, A., Krapp, H., Verschure, P., Prescott, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8064, pp. 59–70. [Google Scholar] [CrossRef]
- Nogueira, H.S.; Oliveira, F.G.; Pio, J.L. Discrete Movement Control of a Bio-Inspired Multi-Legged Robot. In Proceedings of the 2021 Latin American Robotics Symposium, 2021 Brazilian Symposium on Robotics, and 2021 Workshop on Robotics in Education, LARS-SBR-WRE 2021, Natal, Brazil, 11–15 October 2021; pp. 174–179. [Google Scholar] [CrossRef]
- Yang, J.; Wang, X.; Bauer, P. V-Shaped Formation Control for Robotic Swarms Constrained by Field of View. Appl. Sci. 2018, 8, 2120. [Google Scholar] [CrossRef]
- Maass, W. Networks of spiking neurons: The third generation of neural network models. Neural Netw. 1997, 10, 1659–1671. [Google Scholar] [CrossRef]
- Riddle, S.; Nourse, W.R.; Yu, Z.; Thomas, P.J.; Quinn, R.D. A Synthetic Nervous System with Coupled Oscillators Controls Peristaltic Locomotion. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2022; Volume 13548 LNAI, pp. 249–261. [Google Scholar] [CrossRef]
- Szczecinski, N.S.; Goldsmith, C.A.; Nourse, W.R.; Quinn, R.D. A perspective on the neuromorphic control of legged locomotion in past, present, and future insect-like robots. Neuromorphic Comput. Eng. 2023, 3, 023001. [Google Scholar] [CrossRef]
- Sado, F.; Loo, C.K.; Liew, W.S.; Kerzel, M.; Wermter, S. Explainable Goal-driven Agents and Robots—A Comprehensive Review. ACM Comput. Surv. 2023, 55, 211. [Google Scholar] [CrossRef]
- Setchi, R.; Dehkordi, M.B.; Khan, J.S. Explainable Robotics in Human-Robot Interactions. Procedia Comput. Sci. 2020, 176, 3057–3066. [Google Scholar] [CrossRef]
- Shaw, K.M.; Lu, H.; McManus, J.M.; Cullins, M.J.; Chiel, H.J.; Thomas, P.J. Evidence for a central pattern generator built on a heteroclinic channel instead of a limit cycle. In Proceedings of the Computational and Systems Neuroscience 2010, Salt Lake City, UT, USA, 25 February–2 March 2010; Frontiers Media SA. Volume 4. [Google Scholar] [CrossRef]
- Shaw, K.M.; Lyttle, D.N.; Gill, J.P.; Cullins, M.J.; Mcmanus, J.M.; Lu, H.; Thomas, P.J.; Chiel, H.J.; Shaw, K.M.; Lyttle, D.N.; et al. The significance of dynamical architecture for adaptive responses to mechanical loads during rhythmic behavior. J. Comput. Neurosci. 2015, 38, 25–51. [Google Scholar] [CrossRef] [PubMed]
- Daltorio, K.A.; Boxerbaum, A.S.; Horchler, A.D.; Shaw, K.M.; Chiel, H.J.; Quinn, R.D. Efficient worm-like locomotion: Slip and control of soft-bodied peristaltic robots. Bioinspiration Biomim. 2013, 8, 035003. [Google Scholar] [CrossRef] [PubMed]
- Riddle, S.; Jackson, C.; Daltorio, K.A.; Quinn, R.D. A Dynamic Simulation of a Compliant Worm Robot Amenable to Neural Control. In Lecture Notes in Computer Science (Including Subseries Lecture Notes in Artificial Intelligence and Lecture Notes in Bioinformatics); Springer: Berlin/Heidelberg, Germany, 2023; Volume 14157 LNAI, pp. 338–352. [Google Scholar] [CrossRef]
- Kuwabara, J.; Nakajima, K.; Kang, R.; Branson, D.T.; Guglielmino, E.; Caldwell, D.G.; Pfeifer, R. Timing-based control via echo state network for soft robotic arm. In Proceedings of the The 2012 International Joint Conference on Neural Networks (IJCNN), Brisbane, QLD, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar] [CrossRef]
- Graf, N.M.; Grezmak, J.E.; Daltorio, K.A. Get a grip: Inward dactyl motions improve efficiency of sideways-walking gait for an amphibious crab-like robot. Bioinspiration Biomim. 2022, 17, 066008. [Google Scholar] [CrossRef]
- Brecelj, T.; Petrič, T. Application of a Phase State System for Physical Human-Humanoid Robot Collaboration. Mech. Mach. Sci. 2023, 135 MMS, 89–96. [Google Scholar] [CrossRef]
- Picardi, G.; Chellapurath, M.; Iacoponi, S.; Stefanni, S.; Laschi, C.; Calisti, M. Bioinspired underwater legged robot for seabed exploration with low environmental disturbance. Sci. Robot. 2020, 5, 1012. [Google Scholar] [CrossRef]
- Santina, C.D.; Duriez, C.; Rus, D. Model-Based Control of Soft Robots: A Survey of the State of the Art and Open Challenges. IEEE Control. Syst. 2023, 43, 30–65. [Google Scholar] [CrossRef]
- Sun, Y.; Zhang, D.; Liu, Y.; Lueth, T.C. FEM-Based Mechanics Modeling of Bio-Inspired Compliant Mechanisms for Medical Applications. IEEE Trans. Med. Robot. Bionics 2020, 2, 364–373. [Google Scholar] [CrossRef]
- Wachter, S.; Mittelstadt, B.; Floridi, L. Transparent, explainable, and accountable AI for robotics. Sci. Robot. 2017, 2, 31. [Google Scholar] [CrossRef]
- Bundy, A. Preparing for the future of Artificial Intelligence. AI Soc. 2016, 32, 285–287. [Google Scholar] [CrossRef]
- Schaal, S. Dynamic Movement Primitives—A Framework for Motor Control in Humans and Humanoid Robotics. In Adaptive Motion of Animals and Machines; Springer: Tokyo, Japan, 2006; pp. 261–280. [Google Scholar] [CrossRef]
- Ijspeert, A.J.; Nakanishi, J.; Hoffmann, H.; Pastor, P.; Schaal, S. Dynamical Movement Primitives: Learning Attractor Models for Motor Behaviors. Neural Comput. 2013, 25, 328–373. [Google Scholar] [CrossRef]
- Ernesti, J.; Righetti, L.; Do, M.; Asfour, T.; Schaal, S. Encoding of periodic and their transient motions by a single dynamic movement primitive. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Osaka, Japan, 29 November–1 December 2012; pp. 57–64. [Google Scholar] [CrossRef]
- Paraschos, A.; Daniel, C.; Peters, J.R.; Neumann, G. Probabilistic Movement Primitives. Adv. Neural Inf. Process. Syst. 2013, 26, 2616–2624. [Google Scholar]
- Denisa, M.; Gams, A.; Ude, A.; Petric, T. Learning Compliant Movement Primitives Through Demonstration and Statistical Generalization. IEEE/ASME Trans. Mechatron. 2016, 21, 2581–2594. [Google Scholar] [CrossRef]
- Pastor, P.; Righetti, L.; Kalakrishnan, M.; Schaal, S. Online movement adaptation based on previous sensor experiences. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 365–371. [Google Scholar]
- Wensing, P.M.; Slotine, J.J. Sparse Control for Dynamic Movement Primitives. IFAC-PapersOnLine 2017, 50, 10114–10121. [Google Scholar] [CrossRef]
- Laurent, G.; Stopfer, M.; Friedrich, R.W.; Rabinovich, M.I.; Volkovskii, A.; Abarbanel, H.D. Odor Encoding as an Active, Dynamical Process: Experiments, Computation, and Theory. Annu. Rev. Neurosci. 2001, 24, 263–297. [Google Scholar] [CrossRef]
- Rabinovich, M.; Volkovskii, A.; Lecanda, P.; Huerta, R.; Abarbanel, H.D.I.; Laurent, G. Dynamical Encoding by Networks of Competing Neuron Groups: Winnerless Competition. Phys. Rev. Lett. 2001, 87, 068102. [Google Scholar] [CrossRef]
- Shaw, K.M.; Park, Y.M.; Chiel, H.J.; Thomas, P.J. Phase resetting in an asymptotically phaseless system: On the phase response of limit cycles verging on a heteroclinic orbit. SIAM J. Appl. Dyn. Syst. 2012, 11, 350–391. [Google Scholar] [CrossRef]
- Brecelj, T.; Petrič, T. Utilizing a Phase State System for Reliable Physical Assistance in Human-Humanoid Robot Collaboration. In Proceedings of the 2023 21st International Conference on Advanced Robotics (ICAR), Abu Dhabi, United Arab Emirates, 5–8 December 2023; pp. 258–263. [Google Scholar] [CrossRef]
- Nourse, W.; Quinn, R.D.; Szczecinski, N.S. An Adaptive Frequency Central Pattern Generator for Synthetic Nervous Systems. In Proceedings of the Biomimetic and Biohybrid Systems, Paris, France, 17–20 July 2018; Vouloutsi, V., Halloy, J., Mura, A., Mangan, M., Lepora, N., Prescott, T.J., Verschure, P.F., Eds.; Springer: Cham, Switzerland, 2018; pp. 361–364. [Google Scholar]
- Azambuja, R.D.; Klein, F.B.; Adams, S.V.; Stoelen, M.F.; Cangelosi, A. Short-term plasticity in a liquid state machine biomimetic robot arm controller. In Proceedings of the International Joint Conference on Neural Networks, Anchorage, AK, USA, 14–19 May 2017; pp. 3399–3408. [Google Scholar] [CrossRef]
- Rico Mesa, E.M.; Hernández-Riveros, J.A. Determination of the Central Pattern Generator Parameters by a Neuro-Fuzzy Evolutionary Algorithm. In Proceedings of the Advances in Emerging Trends and Technologies, Riobamba, Ecuador, 26–30 October 2020; Botto-Tobar, M., León-Acurio, J., Díaz Cadena, A., Montiel Díaz, P., Eds.; Springer: Cham, Switzerland, 2020; pp. 518–530. [Google Scholar]
- Szczecinski, N.S.; Hunt, A.J.; Quinn, R.D. Design process and tools for dynamic neuromechanical models and robot controllers. Biol. Cybern. 2017, 111, 105–127. [Google Scholar] [CrossRef]
- Fitzpatrick, M.N.; Wang, Y.; Thomas, P.J.; Quinn, R.D.; Szczecinski, N.S. Robotics Application of a Method for Analytically Computing Infinitesimal Phase Response Curves. In Proceedings of the Biomimetic and Biohybrid Systems; Vouloutsi, V., Mura, A., Tauber, F., Speck, T., Prescott, T.J., Verschure, P.F.M.J., Eds.; Springer: Cham, Switzerland, 2020; pp. 104–115. [Google Scholar]
- Jaeger, H. The “Echo State” Approach to Analysing and Training Recurrent Neural Networks-with an Erratum Note; Technical Report; German National Research Center for Information Techology: Bonn, Germany, 2001. [Google Scholar]
- Yuan, Y.; Li, Z.; Zhao, T.; Gan, D. DMP-Based Motion Generation for a Walking Exoskeleton Robot Using Reinforcement Learning. IEEE Trans. Ind. Electron. 2020, 67, 3830–3839. [Google Scholar] [CrossRef]
- Li, D.; Cross, M.C.; Zhou, C.; Zheng, Z. Quasiperiodic, periodic, and slowing-down states of coupled heteroclinic cycles. Phys. Rev. E 2012, 85, 016215. [Google Scholar] [CrossRef] [PubMed]
- Stone, E.; Holmes, P. Random Perturbations of Heteroclinic Attractors. SIAM J. Appl. Math. 1990, 50, 726–743. [Google Scholar] [CrossRef]
- Jeong, V.; Postlethwaite, C. Effect of noise on residence times of a heteroclinic cycle. Dyn. Syst. 2023, 38, 79–101. [Google Scholar] [CrossRef]
- Ashwin, P.; Postlethwaite, C. Quantifying Noisy Attractors: From Heteroclinic to Excitable Networks. SIAM J. Appl. Dyn. Syst. 2016, 15, 1989–2016. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Variable | Definition |
|---|---|
| y | relevant system variable |
| time-scaling term | |
| system damping | |
| system stiffness | |
| g | system’s “goal” position |
| f | controller force (applied to system) |
| K | total number of kernel functions |
| kernel function weight | |
| canonical state of the system (for a single kernel) | |
| system behavior parameters | |
| N | number of sensors |
| coupling matrix | |
| noise |
| Parameter | Canonical State Waveform | Produced Trajectory | |||
|---|---|---|---|---|---|
| Frequency | Magnitude | Shape | Size | ||
| Growth Rate | Increases | No effect | Rotation | Reduces | |
| Magnitude | No effect | Increases | Rotation | Increases | |
| Insensitivity to Noise | Decreases | No effect | Increased precision around kernel locations | No effect | |
| Modification | Error |
|---|---|
| Baseline | 7.588 |
| 6.439 (15% decrease from baseline ) | |
| 5.149 (32% decrease from baseline) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rouse, N.; Daltorio, K. Stable Heteroclinic Channel-Based Movement Primitives: Tuning Trajectories Using Saddle Parameters. Appl. Sci. 2024, 14, 2523. https://doi.org/10.3390/app14062523
Rouse N, Daltorio K. Stable Heteroclinic Channel-Based Movement Primitives: Tuning Trajectories Using Saddle Parameters. Applied Sciences. 2024; 14(6):2523. https://doi.org/10.3390/app14062523
Chicago/Turabian StyleRouse, Natasha, and Kathryn Daltorio. 2024. "Stable Heteroclinic Channel-Based Movement Primitives: Tuning Trajectories Using Saddle Parameters" Applied Sciences 14, no. 6: 2523. https://doi.org/10.3390/app14062523
APA StyleRouse, N., & Daltorio, K. (2024). Stable Heteroclinic Channel-Based Movement Primitives: Tuning Trajectories Using Saddle Parameters. Applied Sciences, 14(6), 2523. https://doi.org/10.3390/app14062523