
A Laser-Induced Breakdown Spectroscopy (LIBS) Instrument for In-Situ Exploration with the DLR Lightweight Rover Unit (LRU)
 , , , , , , , ,
, , , , , , , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. ARCHES LIBS Module
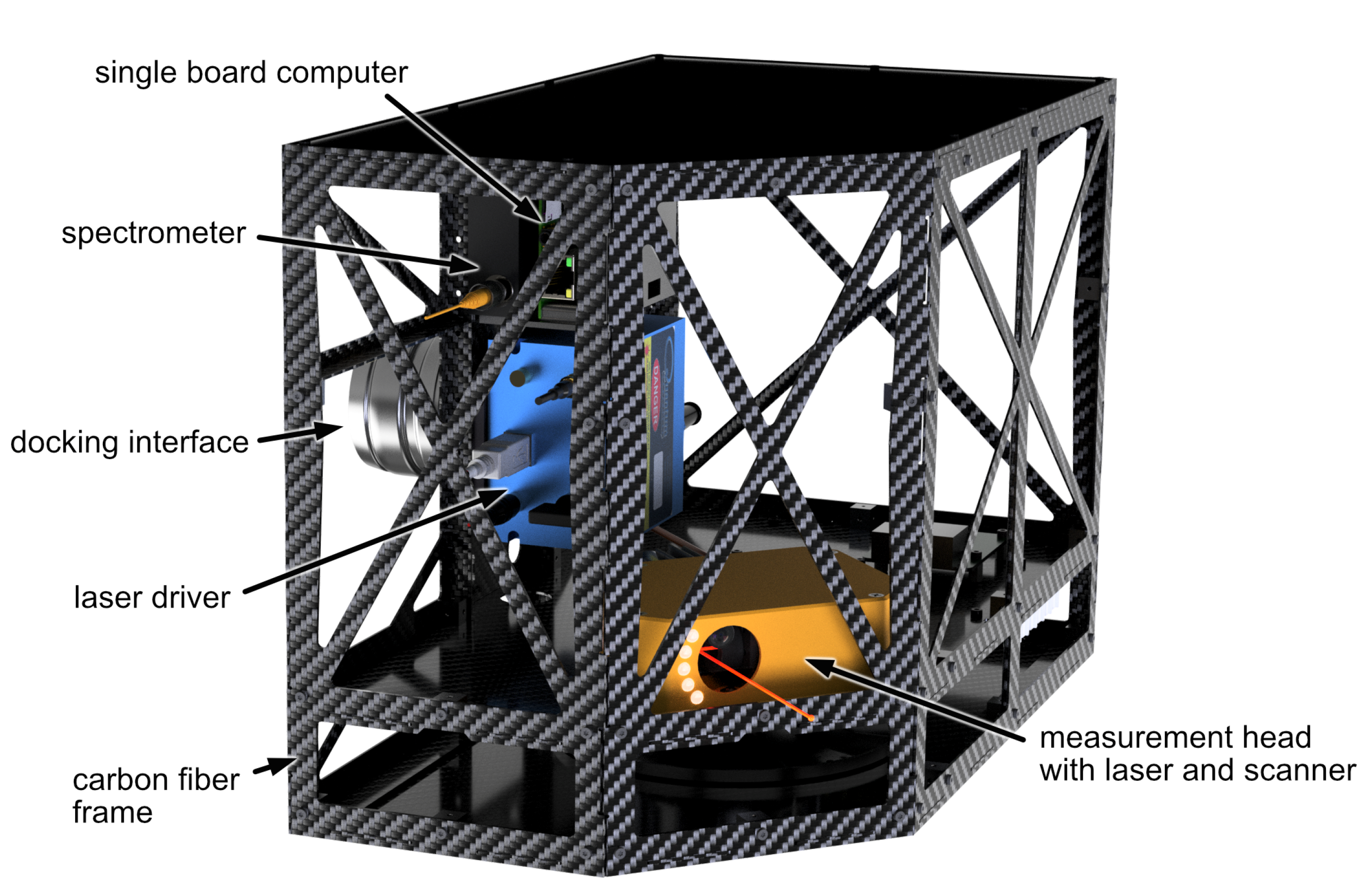
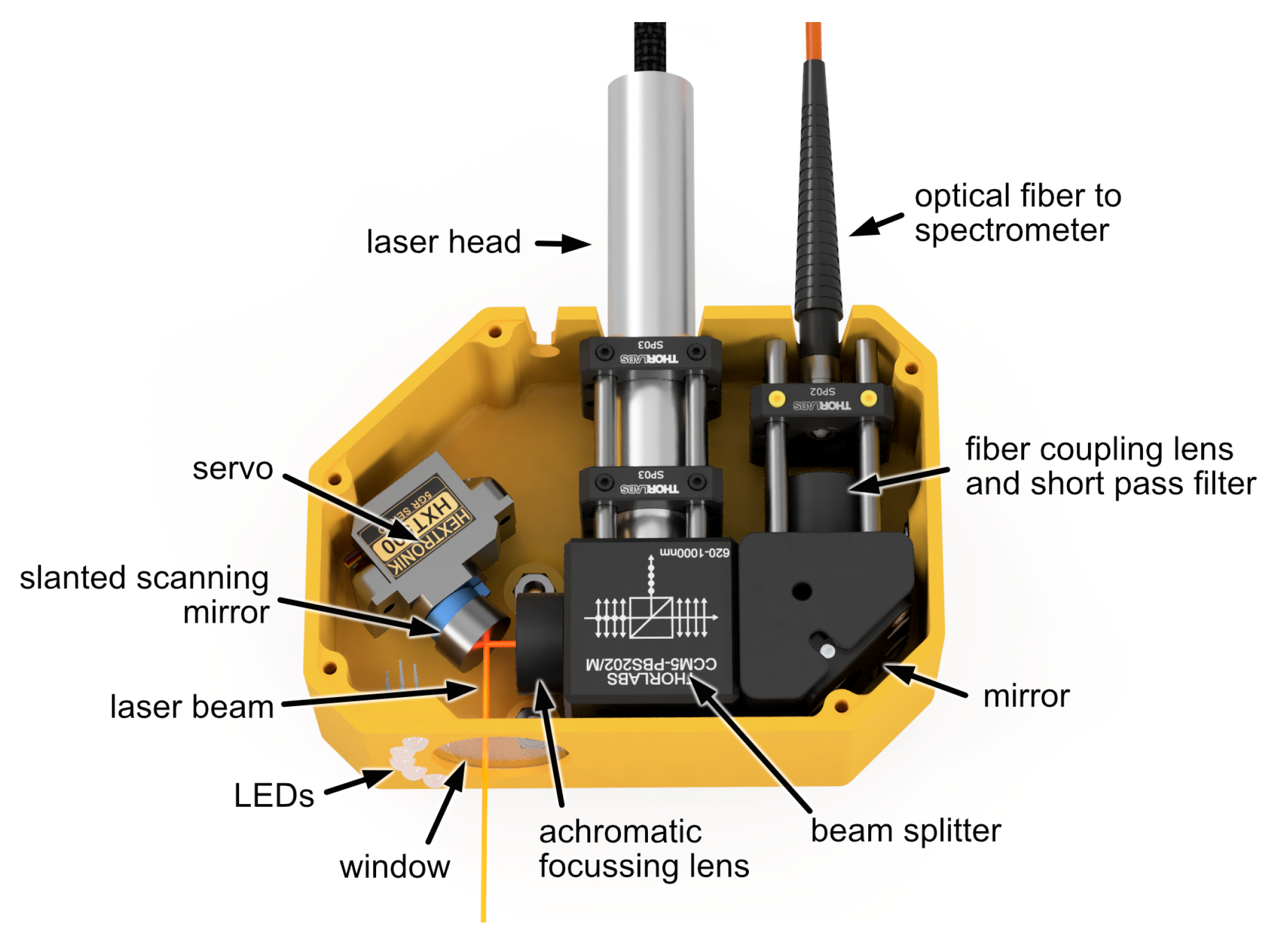
2.1. Hardware Description
2.2. Instrument Control and Software Description
3. Data Visualization and Analysis Tool
3.1. Overview
- Average over all measurement points and shots: This provides a spectrum that is more representative of the bulk composition.
- Shot averages per position: Emphasizes differences between sampling locations.
- Individual display of each shot’s spectrum: Reveals possible shot-to-shot variations, allowing for the derivation of chemical trends with depth.
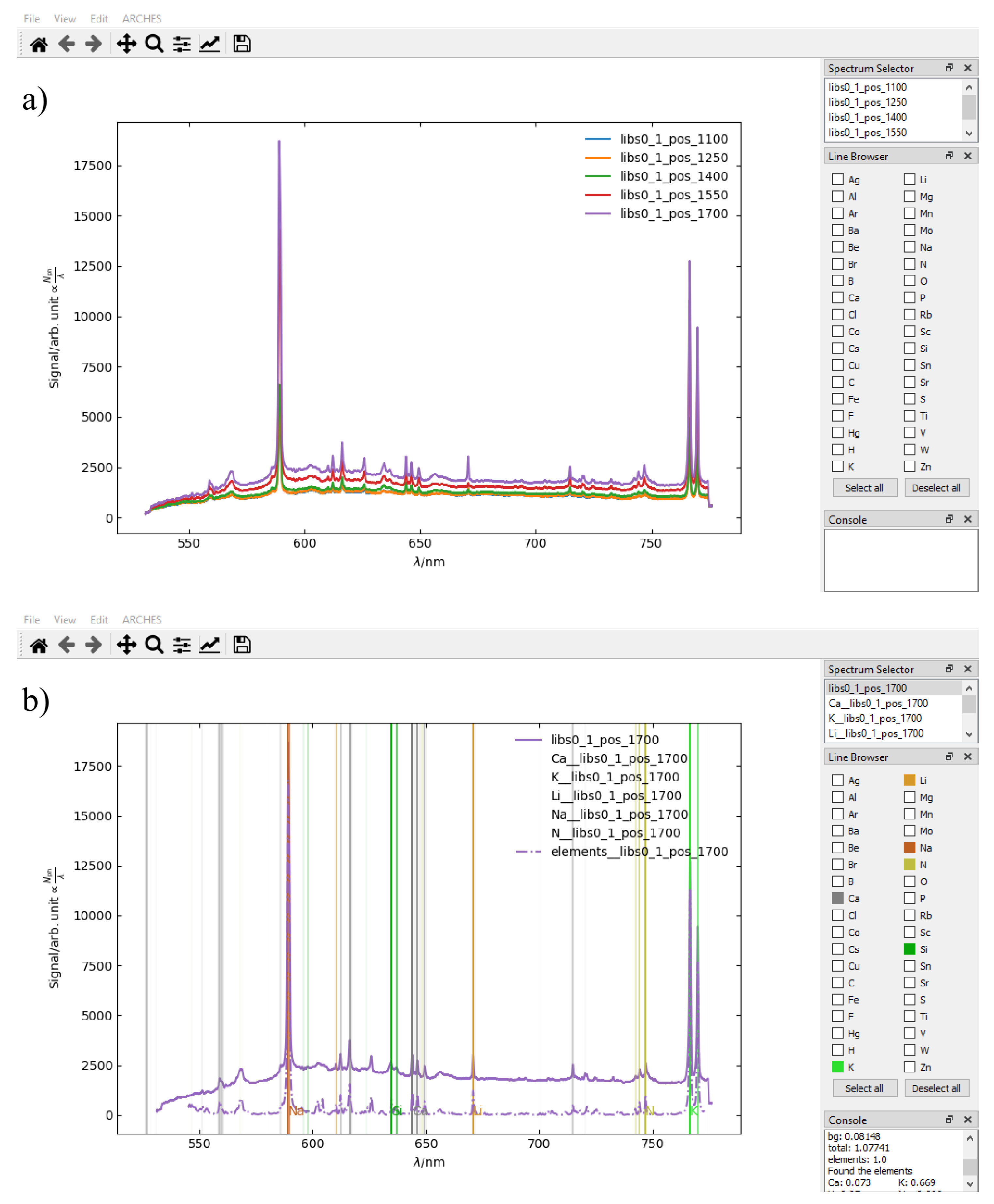
3.2. Automatic Line Identification
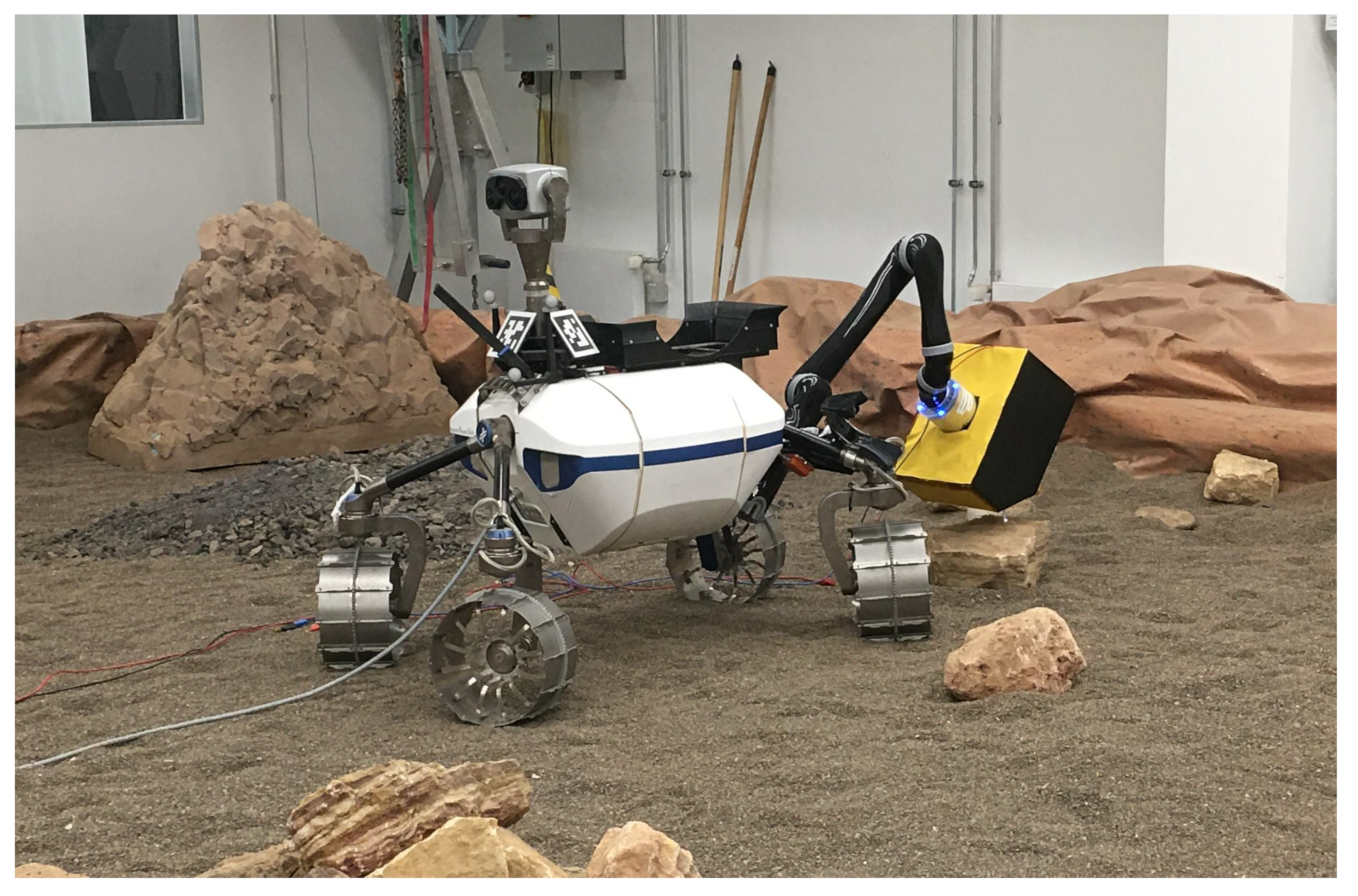
4. ARCHES LIBS Module as LRU2 Payload
5. Results
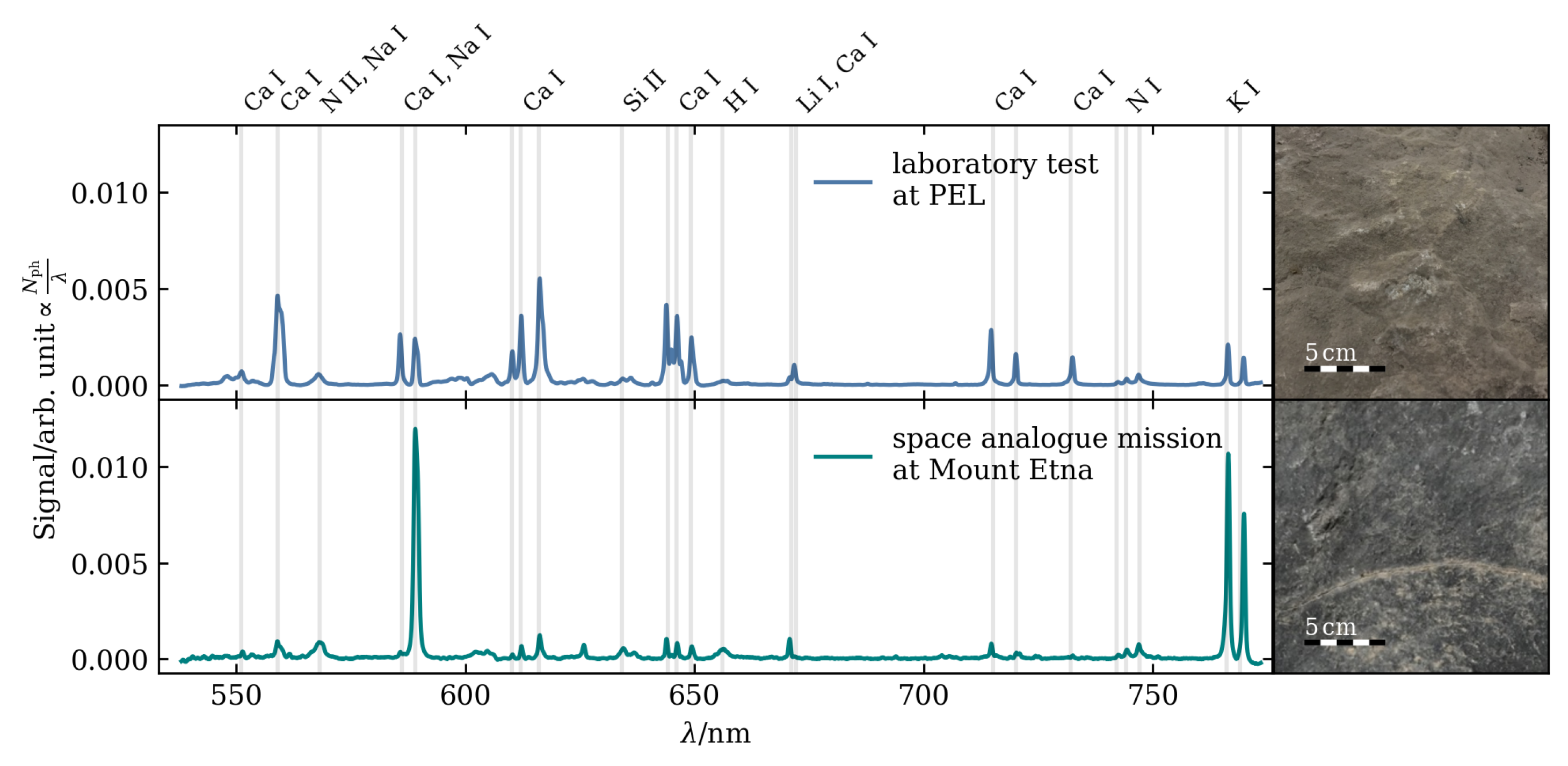
5.1. Laboratory Tests at PEL
5.2. Space Analogue Mission at Mount Etna, Sicily
5.3. LIBS Data Analysis
6. Discussion
7. Summary and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| API | Application Programming Interface |
| ARCHES | Autonomous Robotic Networks to Help Modern Societies |
| DLR | Deutsches Zentrum für Luft- und Raumfahrt (German Aerospace Center) |
| DPSS | Diode Pumped Solid State |
| FDM | Fused Deposition Modeling |
| GPIO | General Purpose Input/Output |
| GUI | Graphical User Interface |
| IMU | Inertial Measurement Unit |
| LED | Light Emitting Diode |
| LIBS | Laser-Induced Breakdown Spectroscopy |
| LRU | Lightweight Rover Unit |
| NIR | Near Infrared |
| PBIMS | Payload Box Infrastructure Management System |
| PCB | Printed Circuit Board |
| PDU | Power Distribution Unit |
| PEL | Planetary Exploration Laboratory |
| PETG | Polyethylenenterephthalat-Glycol |
| PNG | Portable Network Graphics |
| PWM | Pulse Width Modulated |
| ROBEX | Robotic Exploration of Extreme Environments |
| SBC | Single Board Computer |
| SNR | Signal-to-Noise Ratio |
| SSD | Solid-State Drive |
| UV | Ultraviolet |
References
- Cremers, D.A.; Radziemski, L.J. Handbook of Laser-Induced Breakdown Spectroscopy; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Maurice, S.; Wiens, R.C.; Saccoccio, M.; Barraclough, B.; Gasnault, O.; Forni, O.; Mangold, N.; Baratoux, D.; Bender, S.; Berger, G.; et al. The ChemCam Instrument Suite on the Mars Science Laboratory (MSL) Rover: Science Objectives and Mast Unit Description. Space Sci. Rev. 2012, 170, 95–166. [Google Scholar] [CrossRef]
- Wiens, R.C.; Maurice, S.; Barraclough, B.; Saccoccio, M.; Barkley, W.C.; Bell, J.F.; Bender, S.; Bernardin, J.; Blaney, D.; Blank, J.; et al. The ChemCam Instrument Suite on the Mars Science Laboratory (MSL) Rover: Body Unit and Combined System Tests. Space Sci. Rev. 2012, 170, 167–227. [Google Scholar] [CrossRef]
- Maurice, S.; Clegg, S.M.; Wiens, R.C.; Gasnault, O.; Rapin, W.; Forni, O.; Cousin, A.; Sautter, V.; Mangold, N.; Le Deit, L.; et al. ChemCam activities and discoveries during the nominal mission of the Mars Science Laboratory in Gale crater, Mars. J. Anal. At. Spectrom. 2016, 31, 863–889. [Google Scholar] [CrossRef]
- Wiens, R.C.; Maurice, S.; Robinson, S.H.; Nelson, A.E.; Cais, P.; Bernardi, P.; Newell, R.T.; Clegg, S.; Sharma, S.K.; Storms, S.; et al. The SuperCam Instrument Suite on the NASA Mars 2020 Rover: Body Unit and Combined System Tests. Space Sci. Rev. 2021, 217, 4. [Google Scholar] [CrossRef] [PubMed]
- Maurice, S.; Wiens, R.C.; Bernardi, P.; Caïs, P.; Robinson, S.; Nelson, T.; Gasnault, O.; Reess, J.M.; Deleuze, M.; Rull, F.; et al. The SuperCam Instrument Suite on the Mars 2020 Rover: Science Objectives and Mast-Unit Description. Space Sci. Rev. 2021, 217, 47. [Google Scholar] [CrossRef]
- Xu, W.; Liu, X.; Yan, Z.; Li, L.; Zhang, Z.; Kuang, Y.; Jiang, H.; Yu, H.; Yang, F.; Liu, C.; et al. The MarSCoDe Instrument Suite on the Mars Rover of China’s Tianwen-1 Mission. Space Sci. Rev. 2021, 217, 64. [Google Scholar] [CrossRef]
- Wan, X.; Li, C.; Wang, H.; Xu, W.; Jia, J.; Xin, Y.; Ma, H.; Fang, P.; Ling, Z. Design, function, and implementation of china’s first libs instrument (Marscode) on the zhurong mars rover. At. Spectrosc. 2021, 42, 294–298. [Google Scholar] [CrossRef]
- Laxmiprasad, A.; Sridhar Raja, V.; Menon, S.; Goswami, A.; Rao, M.; Lohar, K. An in situ laser induced breakdown spectroscope (LIBS) for Chandrayaan-2 rover: Ablation kinetics and emissivity estimations. Adv. Space Res. 2013, 52, 332–341. [Google Scholar] [CrossRef]
- Laxmiprasad, A.; Sridhar Raja, V.; Goswami, A.; Lohar, K.A.; Rao, M.V.H.; Shila, K.V.; Mahajan, M.; Raha, B.; Smaran, T.S.; Krishnamprasad, B. Laser Induced Breakdown Spectroscope on Chandrayaan-2 Rover: A miniaturized mid-UV to visible active spectrometer for lunar surface chemistry studies. Curr. Sci. 2020, 4, 118. [Google Scholar]
- Laan, E.C.; Ahlers, B.; Van Westrenen, W.; Heiligers, J.; Wielders, A. Moon4You: A combined Raman/LIBS instrument for lunar exploration. In Proceedings of the Instruments and Methods for Astrobiology and Planetary Missions XII, San Diego, CA, USA, 4–6 August 2009; Volume 7441, pp. 372–379. [Google Scholar]
- Courreges-Lacoste, G.B.; Ahlers, B.; Pérez, F.R. Combined Raman spectrometer/laser-induced breakdown spectrometer for the next ESA mission to Mars. Spectrochim. Acta A Mol. Biomol. Spectrosc. 2007, 68, 1023–1028. [Google Scholar] [CrossRef]
- Court, A. Raman-LIBS, a Journey from Mars to Earth Via the Moon. In Proceedings of the IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Arp, Z.A.; Cremers, D.A.; Harris, R.D.; Oschwald, D.M.; Parker, G.R., Jr.; Wayne, D.M. Feasibility of generating a useful laser-induced breakdown spectroscopy plasma on rocks at high pressure: Preliminary study for a Venus mission. Spectrochim. Acta Part B At. Spectrosc. 2004, 59, 987–999. [Google Scholar] [CrossRef]
- Wiens, R.C.; Maurice, S.; Clegg, S.; Sharma, S.; Misra, A.; Bender, S.; Newell, R.; Dallmann, N.; Lanza, N.; Forni, O.; et al. Compact Remote Raman-LIBS Instrument for Mars or Titan. In Proceedings of the 43rd Lunar and Planetary Science Conference, The Woodlands, TX, USA, 19–23 March 2012; Volume 43, p. 1699. [Google Scholar]
- Wiens, R.C.; Udry, A.; Beyssac, O.; Quantin-Nataf, C.; Mangold, N.; Cousin, A.; Mandon, L.; Bosak, T.; Forni, O.; McLennan, S.M.; et al. Compositionally and density stratified igneous terrain in Jezero crater, Mars. Sci. Adv. 2022, 8, eabo3399. [Google Scholar] [CrossRef] [PubMed]
- Gasnault, O.; Lanza, N.; Wiens, R.; Maurice, S.; Mangold, N.; Johnson, J.; Dehouck, E.; Beck, P.; Cousin, A.; Pinet, P.; et al. Chemcam: Zapping mars for 10 years (and more). In Proceedings of the Lunar and Planetary Science Conference, The Woodlands, TX, USA, 13–17 March 2023; Volume 54, p. 2076. [Google Scholar]
- Schuster, M.J.; Brunner, S.G.; Bussmann, K.; Büttner, S.; Dömel, A.; Hellerer, M.; Lehner, H.; Lehner, P.; Porges, O.; Reill, J.; et al. Towards autonomous planetary exploration: The Lightweight Rover Unit (LRU), its success in the SpaceBotCamp challenge, and beyond. J. Intell. Robot. Syst. 2019, 93, 461–494. [Google Scholar] [CrossRef]
- Schuster, M.J.; Muller, M.G.; Brunner, S.G.; Lehner, H.; Lehner, P.; Sakagami, R.; Domel, A.; Meyer, L.; Vodermayer, B.; Giubilato, R.; et al. The ARCHES Space-Analogue Demonstration Mission: Towards Heterogeneous Teams of Autonomous Robots for Collaborative Scientific Sampling in Planetary Exploration. IEEE Robot. Autom. Lett. 2020, 5, 5315–5322. [Google Scholar] [CrossRef]
- Wedler, A.; Schuster, M.J.; Müller, M.G.; Vodermayer, B.; Meyer, L.; Giubilato, R.; Vayugundla, M.; Smisek, M.; Dömel, A.; Steidle, F.; et al. German Aerospace Center’s advanced robotic technology for future lunar scientific missions: DLR’s Advanced Robotic Technology. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2021, 379, 20190574. [Google Scholar] [CrossRef] [PubMed]
- Francis, R.; Estlin, T.; Doran, G.; Johnstone, S.; Gaines, D.; Verma, V.; Burl, M.; Frydenvang, J.; Montaño, S.; Wiens, R.C.; et al. AEGIS autonomous targeting for ChemCam on Mars Science Laboratory: Deployment and results of initial science team use. Sci. Robot. 2017, 2, eaan4582. [Google Scholar] [CrossRef]
- Vogt, D.S.; Schröder, S.; Richter, L.; Deiml, M.; Weßels, P.; Neumann, J.; Hübers, H.W. VOILA on the LUVMI-X Rover: Laser-Induced Breakdown Spectroscopy for the Detection of Volatiles at the Lunar South Pole. Sensors 2022, 22, 9518. [Google Scholar] [CrossRef]
- Rammelkamp, K.; Schröder, S.; Lomax, B.; Clave, E.; Hübers, H.W. LIBS and Raman spectroscopy for extraterrestrial in-situ resource scouting and extraction processes. Frontiers, 2024; in revision. [Google Scholar]
- Rauschenbach, I.; Jessberger, E.; Pavlov, S.; Hübers, H.W. Miniaturized Laser-Induced Breakdown Spectroscopy for the in-situ analysis of the Martian surface: Calibration and quantification. Spectrochim. Acta Part B At. Spectrosc. 2010, 65, 758–768. [Google Scholar] [CrossRef]
- Knight, A.K.; Scherbarth, N.L.; Cremers, D.A.; Ferris, M.J. Characterization of laser-induced breakdown spectroscopy (LIBS) for application to space exploration. Appl. Spectrosc. 2000, 54, 331–340. [Google Scholar] [CrossRef]
- Effenberger, A.J.; Scott, J.R. Effect of atmospheric conditions on LIBS spectra. Sensors 2010, 10, 4907–4925. [Google Scholar] [CrossRef] [PubMed]
- Wedler, A.; Müller, M.G.; Schuster, M.; Durner, M.; Brunner, S.; Lehner, P.; Lehner, H.; Dömel, A.; Vayugundla, M.; Steidle, F.; et al. Preliminary Results for the Multi-Robot, Multi-Partner, Multi-Mission, Planetary Exploration Analogue Campaign on Mount Etna. In Proceedings of the International Astronautical Congress, IAC 2021, Dubai, United Arab Emirates, 25 October 2021. [Google Scholar]
- Wedler, A.; Müller, M.G.; Schuster, M.; Durner, M.; Lehner, P.; Dömel, A.; Steidle, F.; Vayugundla, M.; Sakagami, R.; Meyer, L.; et al. Finally! insights into the arches lunar planetary exploration analogue campaign on etna in summer 2022. In Proceedings of the 73rd International Astronautical Congress, IAC 2022, Paris, France, 18–22 September 2022. [Google Scholar]
- Carey, W.; Krueger, T.; Wedler, A.; Wormnes, K.; Grenouilleau, J.; Ferreira, E.; Nergaard, K.; van der Hulst, F.; den Exter, E.; Gerdes, L.; et al. METERON Analog-1: A Touch Remote. In Proceedings of the International Astronautical Congress, IAC 2022, Paris, France, 18–22 September 2022. [Google Scholar]
- Prince, A.F.; Vodermayer, B.; Pleintinger, B.; Kolb, A.; Franchini, G.; Staudinger, E.; Dietz, E.; Schröder, S.; Frohmann, S.; Seel, F.; et al. Modular Mechatronics Infrastructure for robotic planetary exploration assets in a field operation scenario. Acta Astronaut. 2023, 212, 160–176. [Google Scholar] [CrossRef]
- Weiner, P.; Starke, J.; Hundhausen, F.; Beil, J.; Asfour, T. The kit prosthetic hand: Design and control. In Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018; pp. 3328–3334. [Google Scholar]
- Hansen, P.B. Modeling of LIBS Spectra Obtained in Martian Atmospheric Conditions; Humboldt Universitaet zu Berlin: Berlin, Germany, 2022. [Google Scholar]
- PyQt5. Version 5.15.7. Available online: https://pypi.org/project/PyQt5/ (accessed on 28 January 2024).
- Hunter, J.D. Matplotlib: A 2D graphics environment. Comput. Sci. Eng. 2007, 9, 90–95. [Google Scholar] [CrossRef]
- Harris, C.R.; Millman, K.J.; van der Walt, S.J.; Gommers, R.; Virtanen, P.; Cournapeau, D.; Wieser, E.; Taylor, J.; Berg, S.; Smith, N.J.; et al. Array programming with NumPy. Nature 2020, 585, 357–362. [Google Scholar] [CrossRef] [PubMed]
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed]
- Yaroshchyk, P.; Eberhardt, J.E. Automatic correction of continuum background in Laser-induced Breakdown Spectroscopy using a model-free algorithm. Spectrochim. Acta Part B At. Spectrosc. 2014, 99, 138–149. [Google Scholar] [CrossRef]
- Kramida, A.; Olsen, K.; Ralchenko, Y. Nist Libs Database; National Institute of Standards and Technology, US Department of Commerce: Gaithersburg, MD, USA, 2019.
- Cristoforetti, G.; De Giacomo, A.; Dell’Aglio, M.; Legnaioli, S.; Tognoni, E.; Palleschi, V.; Omenetto, N. Local Thermodynamic Equilibrium in Laser-Induced Breakdown Spectroscopy: Beyond the McWhirter criterion. Spectrochim. Acta Part B At. Spectrosc. 2010, 65, 86–95. [Google Scholar] [CrossRef]
- Lehner, P.; Sakagami, R.; Boerdijk, W.; Dömel, A.; Durner, M.; Franchini, G.; Prince, A.; Lakatos, K.; Risch, D.L.; Meyer, L.; et al. Mobile Manipulation of a Laser-induced Breakdown Spectrometer for Planetary Exploration. In Proceedings of the 2023 IEEE Aerospace Conference, Big Sky, MT, USA, 4–11 March 2023; pp. 1–19. [Google Scholar] [CrossRef]
- Durner, M.; Boerdijk, W.; Fanger, Y.; Sakagami, R.; Risch, D.L.; Triebel, R.; Wedler, A. Autonomous Rock Instance Segmentation for Extra-Terrestrial Robotic Missions. In Proceedings of the 2023 IEEE Aerospace Conference, AERO 2023, Big Sky, MT, USA, 4–11 March 2023. [Google Scholar]
- Wedler, A.; Hellerer, M.; Rebele, B.; Gmeiner, H.; Vodermayer, B.; Bellmann, T.; Barthelmes, S.; Rosta, R.; Lange, C.; Witte, L.; et al. Robex—Components and methods for the planetary exploration demonstration mission. In Proceedings of the 13th Symposium on Advanced Space Technologies in Robotics and Automation (ASTRA), Noordwijk, The Netherlands, 10–13 May 2015. [Google Scholar]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Schröder, S.; Seel, F.; Dietz, E.; Frohmann, S.; Hansen, P.B.; Lehner, P.; Fonseca Prince, A.; Sakagami, R.; Vodermayer, B.; Wedler, A.; et al. A Laser-Induced Breakdown Spectroscopy (LIBS) Instrument for In-Situ Exploration with the DLR Lightweight Rover Unit (LRU). Appl. Sci. 2024, 14, 2467. https://doi.org/10.3390/app14062467
Schröder S, Seel F, Dietz E, Frohmann S, Hansen PB, Lehner P, Fonseca Prince A, Sakagami R, Vodermayer B, Wedler A, et al. A Laser-Induced Breakdown Spectroscopy (LIBS) Instrument for In-Situ Exploration with the DLR Lightweight Rover Unit (LRU). Applied Sciences. 2024; 14(6):2467. https://doi.org/10.3390/app14062467
Chicago/Turabian StyleSchröder, Susanne, Fabian Seel, Enrico Dietz, Sven Frohmann, Peder Bagge Hansen, Peter Lehner, Andre Fonseca Prince, Ryo Sakagami, Bernhard Vodermayer, Armin Wedler, and et al. 2024. "A Laser-Induced Breakdown Spectroscopy (LIBS) Instrument for In-Situ Exploration with the DLR Lightweight Rover Unit (LRU)" Applied Sciences 14, no. 6: 2467. https://doi.org/10.3390/app14062467
APA StyleSchröder, S., Seel, F., Dietz, E., Frohmann, S., Hansen, P. B., Lehner, P., Fonseca Prince, A., Sakagami, R., Vodermayer, B., Wedler, A., Börner, A., & Hübers, H.-W. (2024). A Laser-Induced Breakdown Spectroscopy (LIBS) Instrument for In-Situ Exploration with the DLR Lightweight Rover Unit (LRU). Applied Sciences, 14(6), 2467. https://doi.org/10.3390/app14062467