
Research on Multi-UAV Task Assignment Based on a Multi-Objective, Improved Brainstorming Optimization Algorithm


Abstract
1. Introduction
- Based on research directions, existing research on drone delivery mainly focuses on the following three aspects: first, optimization model and algorithm research; the second is to explore more ways of operating drones; and the third is to study the impact of different parameters of a UAV on delivery [22]. However, in research on drone delivery services, recycling services are given little consideration [23].
- Most research on drone delivery uses non-real technical parameters. Only a few scholars use accurate technical parameters for research [24].
- Currently, to simplify the problem, most literature ignores some practical factors when constructing models or considers relatively few single factors. Only a few pieces of literature have proposed the expansion problem of combined distribution with multi-factor fusion [25].
- The standard FSTSP (Flying Sidekick Traveling Salesman Problem) model has no payload management constraints to control customers’ orders on each drone route because without them, drone routes might not be feasible.
- The standard FSTSP model has a small maximum number of possible stops per drone strike, and there is still much room for improvement in saving potential service time and drone utilization.
- Consider returning missions to improve the efficiency and sustainability of payloads. Traditional FSTSPs do not fully utilize the payload capabilities of UAs.
- Consider the dynamic energy consumption of the UAV to make it more suitable for the actual delivery of the UAV.
- Comprehensively consider the constraints of UAV energy consumption, load, volume, flight speed, and time window, and establish a multi-UAV collaborative task assignment and path planning model. It integrates multiple factors and considers them simultaneously to supplement research on collaborative optimization of task assignment and path planning.
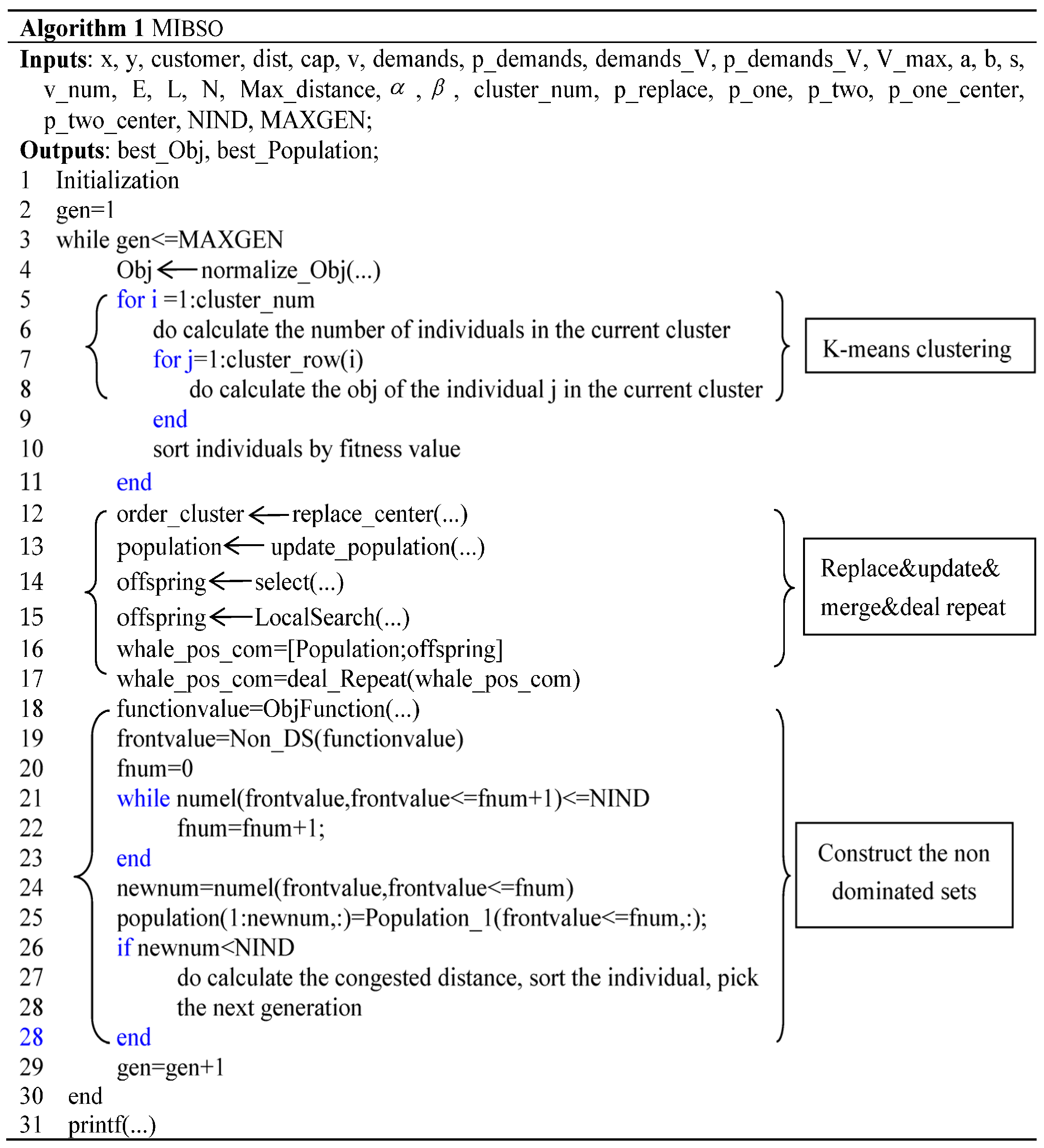
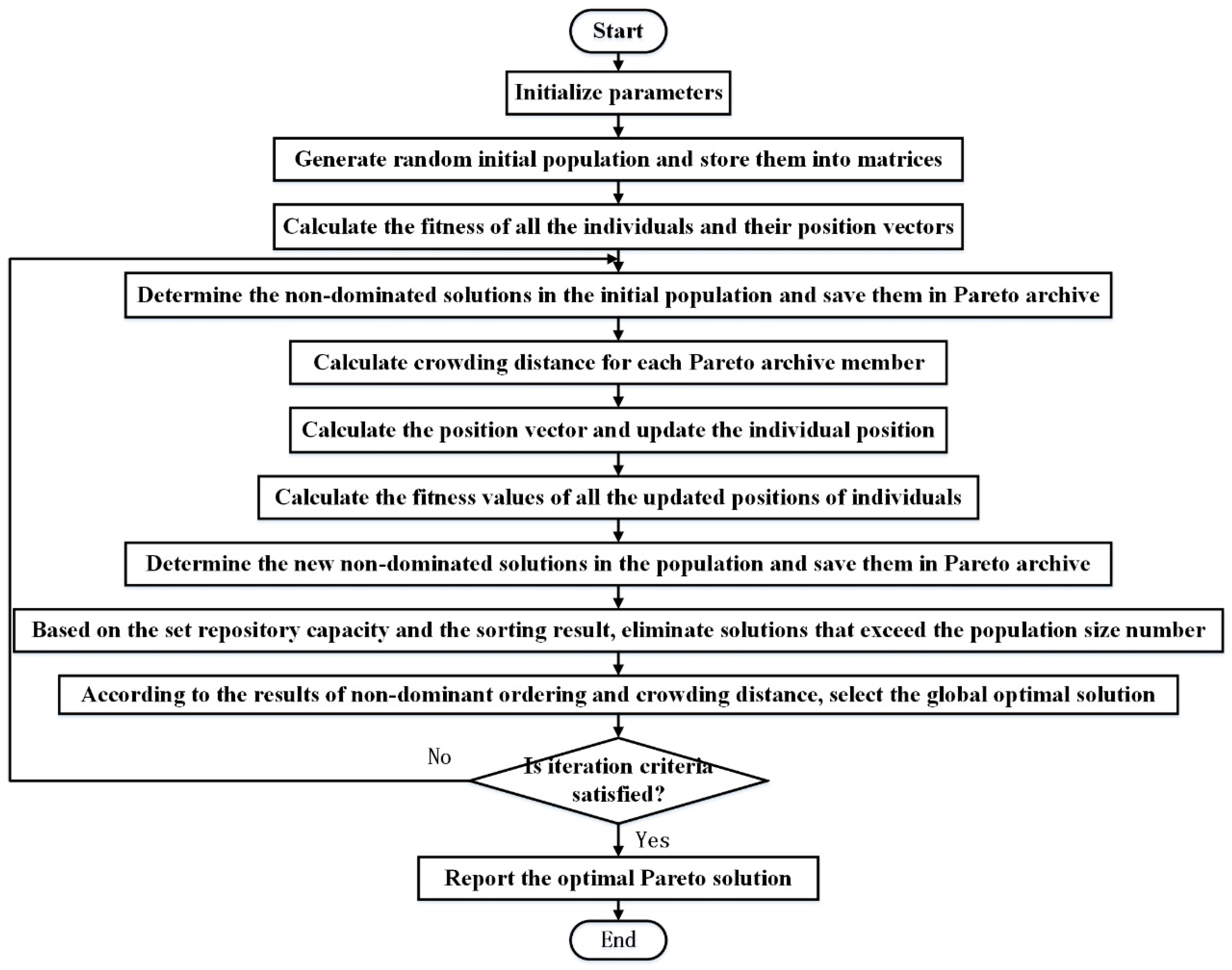
- Develop a multi-objective, improved brainstorming optimization algorithm based on Pareto dominance (MIBSO) to solve cases of reasonable size, and make up for the problem of unreasonable weight assignment and a single result in applying a linear weight method to transform multiple goals into single goals proposed in the literature [16].
- Taking “Ehang” Falcon B (Logistics version) UAV as the target model and taking the distribution of materials during the outbreak of COVID-19 in Changchun, China, as an example, an empirical analysis was conducted to form a general technical scheme for the delivery of emergency materials by UAV, providing scientific reference for emergency materials distribution and rescue tasks under major disaster scenarios.
2. Methods
2.1. Modeling
2.1.1. Problem Description and Hypothesis
- There are multiple drones and one distribution center.
- The speeds of the drones are known and constant.
- Drones can serve all customers.
- The drone flight endurance is known and fixed regarding travel time.
- The drone must leave customer locations immediately after delivering or picking up parcels.
- The UAV must be able to fulfil the service demand of at least one demand point.
- The UAV has an entire initial power supply and does not consider any midway charge or change.
- The distribution center’s cargo reserves are deemed unlimited.
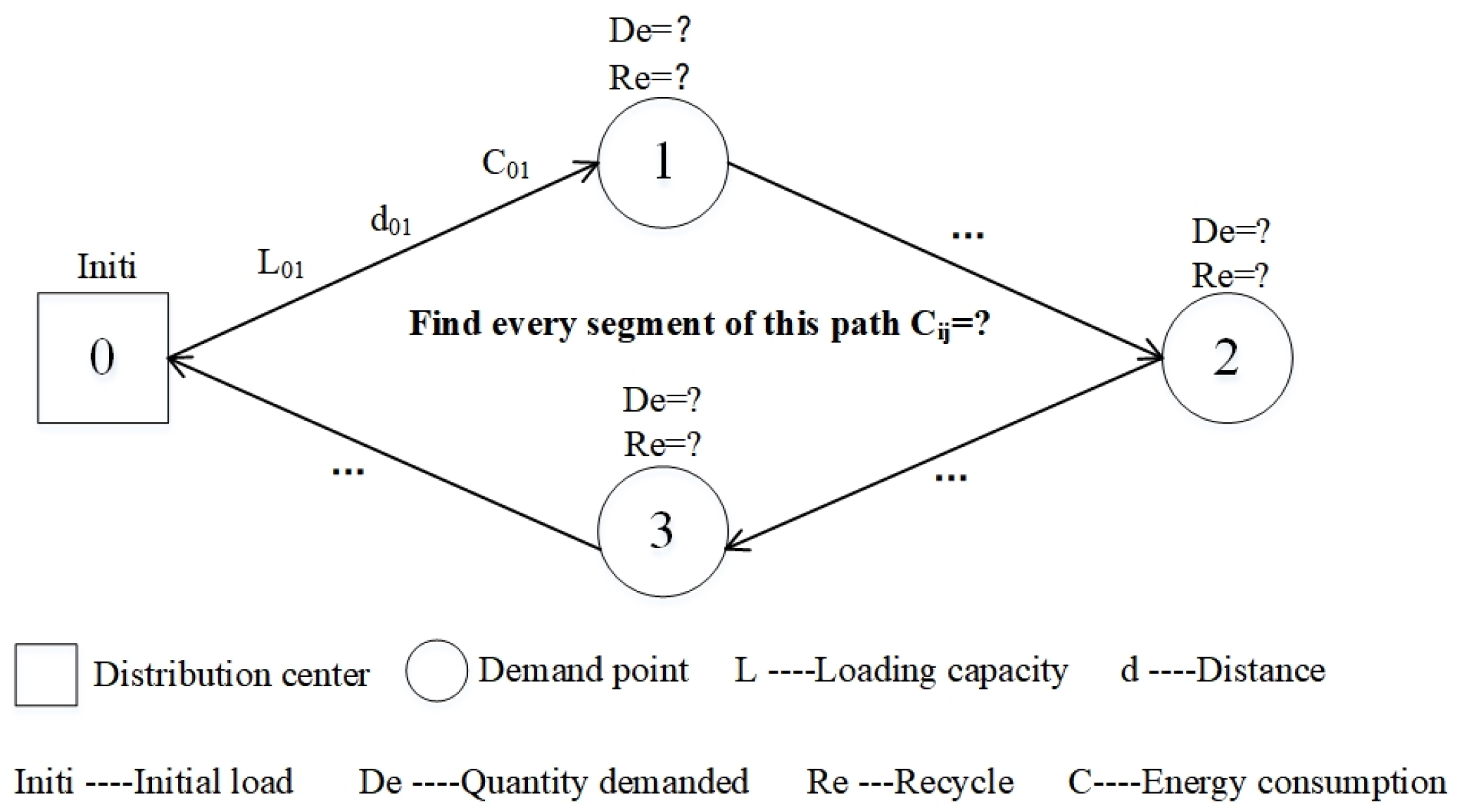
2.1.2. Model Construction
- (1)
- The number of drones carrying out tasks shall not exceed the total number of drones owned.
- (2)
- UAV’s service rules: Equation (19) indicates that each demand point can only be assigned to one path. Equation (20) indicates that a demand point can only be served by one drone. Equation (20) indicates that a drone can serve multiple demand points and at least one demand point.
- (3)
- Traffic constraints of a UAV on the path: Equation (22) indicates that the drone can only reach one node from the starting point, meaning only one drone can be on that path. Equation (23) indicates that drones returning from a particular node to the starting point can only have one drone on that path. Equation (24) constrains the flow balance on this path.
- (4)
- Continuous constraints on UAV travel time: During the process of the drone completing the task from the previous to the current demand point, there is no other time consumption except for service and travel time. Equation (25) can ensure no time loss for the drone during the process, ensuring the continuity of time.
- (5)
- Load relation constraint: Equation (26) represents the actual loading weight of the drone after serving the first demand point on the route. Equation (27) represents the actual loading weight of the drone after completing service at any demand point on the route (excluding the first demand point).
- (6)
- The drone’s flight speed cannot exceed the maximum speed limit.
- (7)
- The drone’s flight time cannot exceed the maximum time limit.
- (8)
- The flying distance of drones shall not exceed the maximum distance limit.
- (9)
- The total volume of cargo loaded by drones shall not exceed the maximum capacity of the drone cargo hold.
- (10)
- Ensure that all demand points can be served, assuming the number of demand points is .
2.2. Optimization Algorithm Design
2.2.1. Encoding and Decoding
2.2.2. Elite Retention Strategy
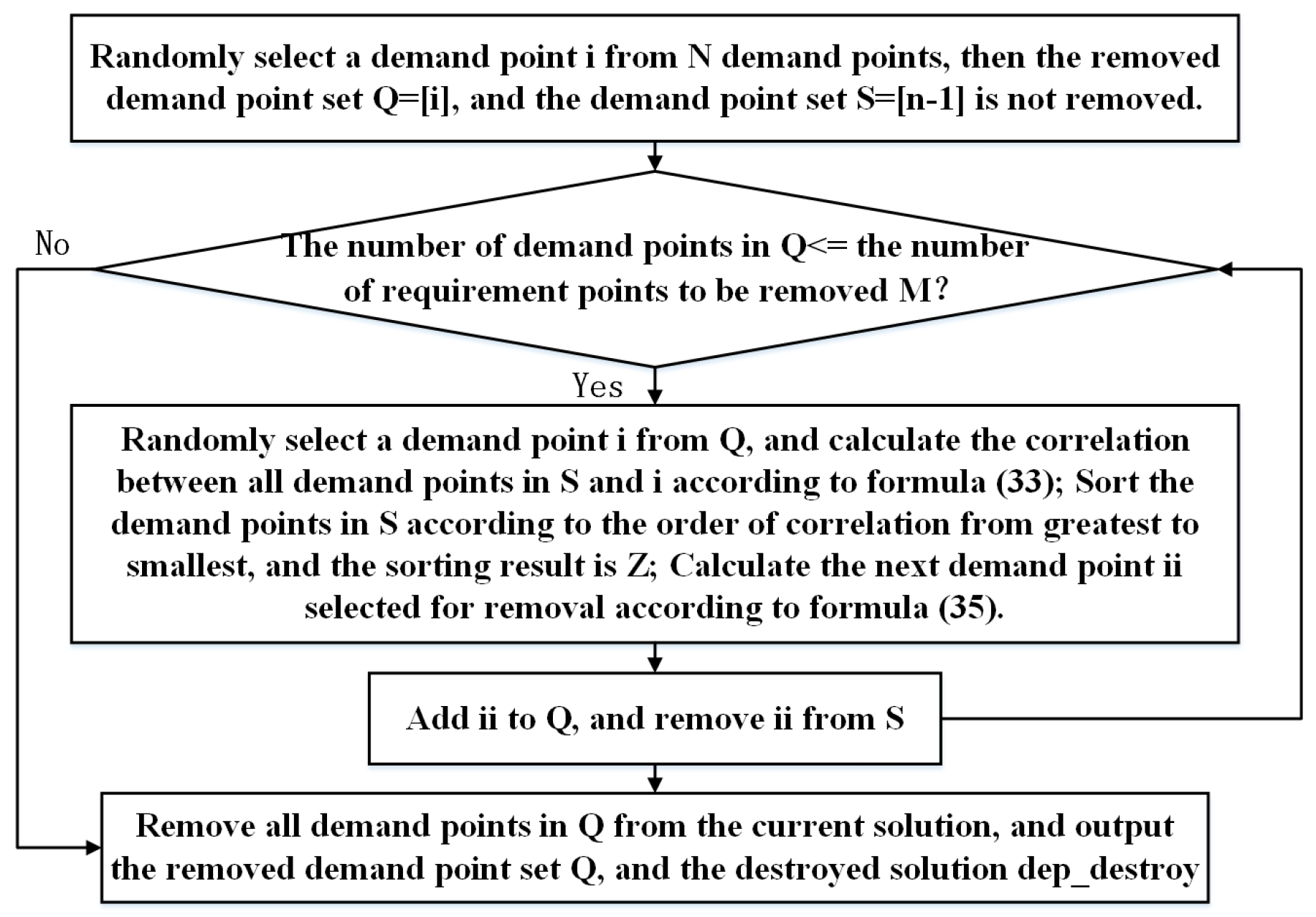
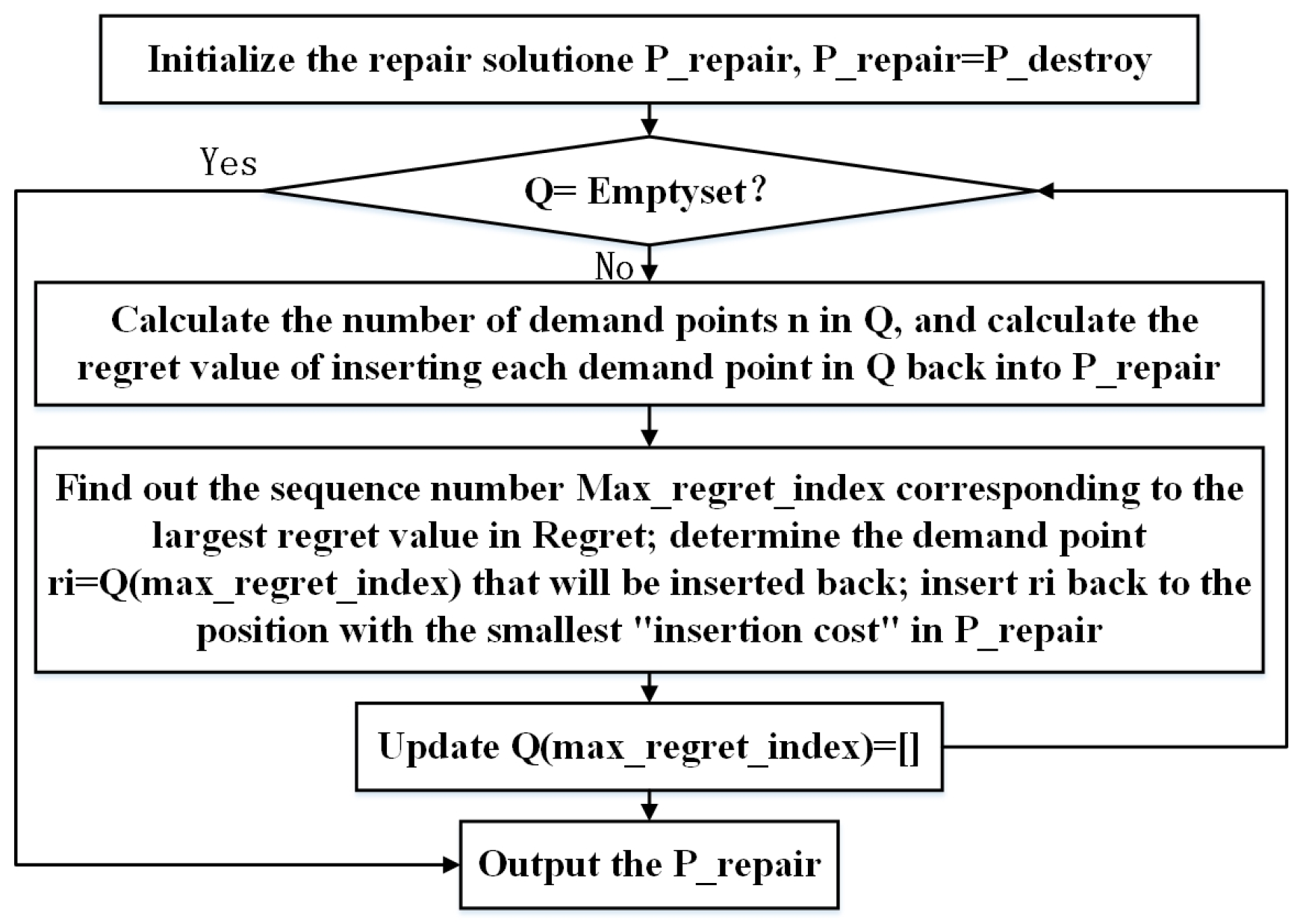
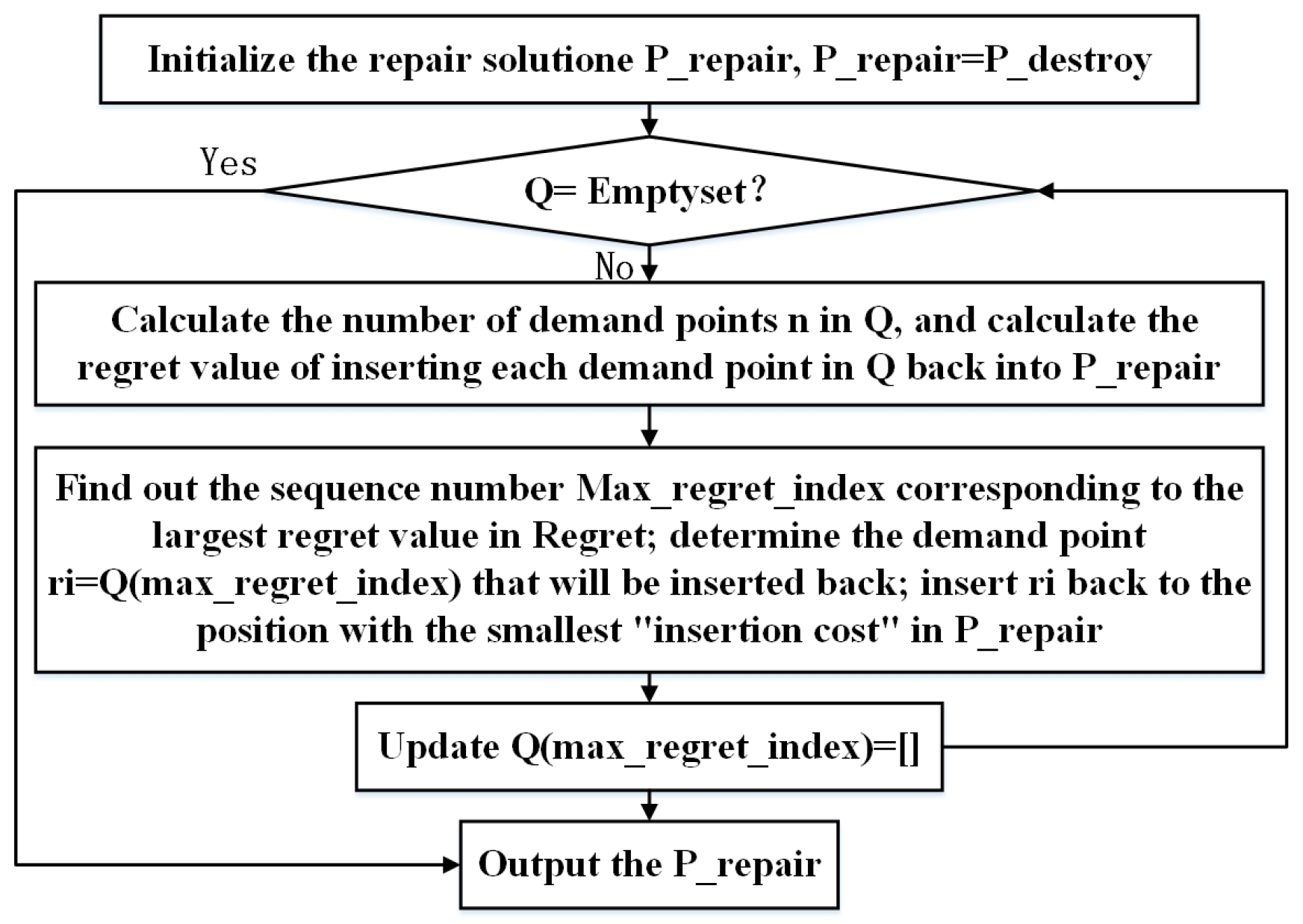
2.2.3. Local Search Operation
3. Results
3.1. Case Analysis
3.1.1. Relevant Data
3.1.2. Simulation
3.1.3. Results and Analysis
4. Algorithm Performance Analysis
5. Conclusions
- (1)
- Model: This paper comprehensively considers factors of UAV load, energy consumption, cargo quality, and volume, intending to minimize the total cost of drone distribution and the full punishment of tasks, as well as optimize the balance of drone usage. A multi-UAV collaborative task assignment and routing problem with simultaneous delivery, pick-up, and time windows (MVTARPSDPTW) is constructed.
- (2)
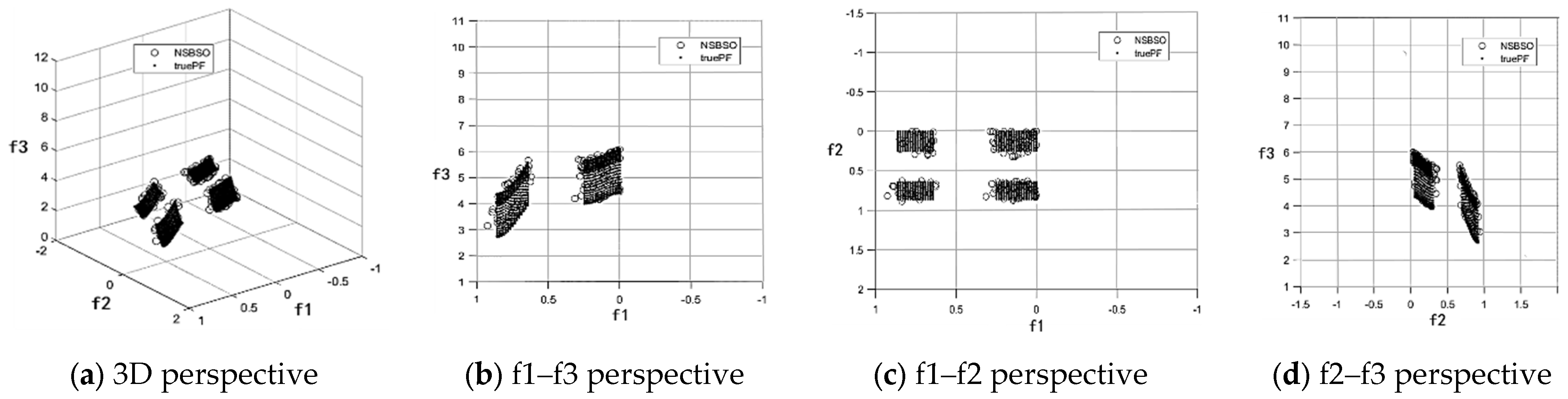
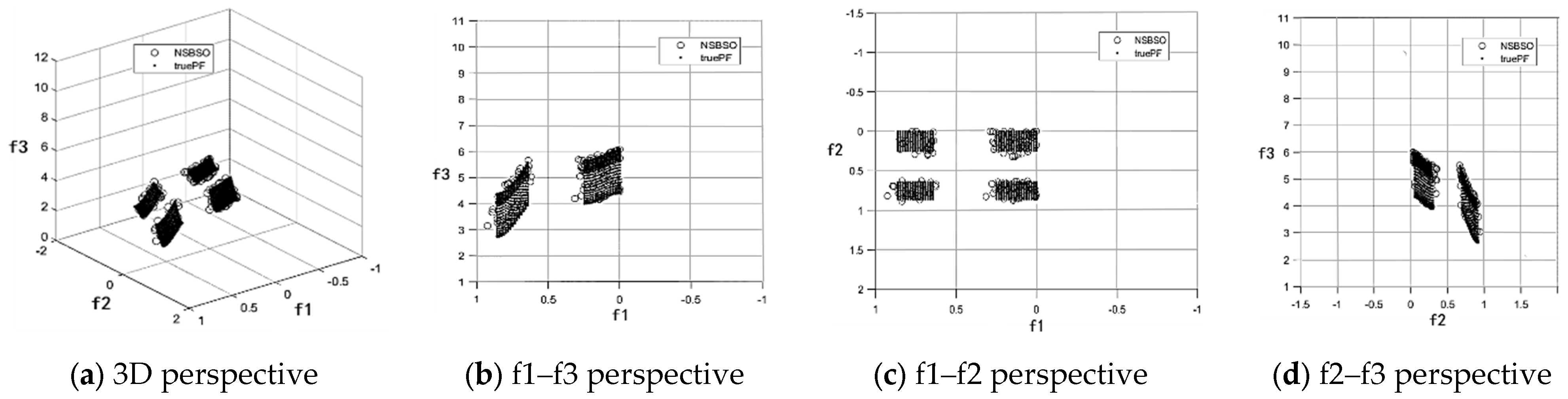
- Algorithm: This work proposes a multi-objective, improved brainstorming optimization algorithm based on Pareto dominance (MIBSO) to solve the MVTARPSDPTW problem, and selected DTLZ4, DTLZ5, and DTLZ6 as benchmarks to test the algorithm performance based on the model attributes. From algorithm convergence, solution distribution, and comprehensive performance, GD, the Spacing metric, HV, and IGD are selected to evaluate the algorithm performance. The test results show that MIBSO in this paper performs well in terms of convergence and distribution and is feasible.
- (3)
- Application: This paper involves three aspects: location selection of distribution centers, task allocation of drone distribution, and travel planning in the material distribution process, fully covering the main task links of material distribution, considering comprehensive factors. These can solve practical engineering problems in challenging environments. This research finally forms a general-purpose technology scheme for UAV emergency supplies distribution, which can provide scientific reference for rescue tasks in significant disasters.
- (4)
- Future work: To consider more diversified distribution scenarios integrating heterogeneous UAVs, heterogeneous goods, demand uncertainty, and multi-task modes.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tabusca, A.; Garais, G.E. IoT and the flying answer to COVID-19. J. Inf. Syst. Oper. Manag. 2020, 14, 162–174. [Google Scholar]
- During the Epidemic, JD’s Unmanned Delivery “Technology to Fight the Epidemic”. Available online: https://baijiahao.baidu.com/s?id=1663848656464964799&wfr=spider&for=pc (accessed on 13 October 2023).
- Wu, G.; Mao, N.; Luo, Q.; Xu, B.J.; Shi, J.M.; Suganthan, P.N. Collaborative truck-drone routing for contactless parcel delivery during the epidemic. IEEE Trans. Intell. Transp. Syst. 2022, 23, 25077–25091. [Google Scholar] [CrossRef]
- Nyaaba, A.A.; Ayamga, M. Intricacies of Medical Drones in Healthcare Delivery: Implications for Africa. Technol. Soc. 2021, 66, 101624. [Google Scholar] [CrossRef]
- Euchi, J. Do Drones Have a Realistic Place in a Pandemic Fight for Delivering Medical Supplies in Healthcare Systems Problems? Chin. J. Aeronaut. 2021, 34, 182–190. [Google Scholar] [CrossRef]
- Ling, G.; Draghic, N. Aerial Drones for Blood Delivery. Transfusion 2021, 59, 1608–1611. [Google Scholar] [CrossRef] [PubMed]
- Rodrigues, T.A.; Patrikar, J.; Oliveira, N.L.; Matthews, H.S.; Scherer, S.; Samaras, C. Drone flight data reveal energy and greenhouse gas emissions savings for very small package delivery. Patterns 2022, 3, 100569. [Google Scholar] [CrossRef] [PubMed]
- Chauhan, D.R.; Unnikrishnan, A.; Figliozzi, M.A.; Boyles, S.D. Robust Multi-Period Maximum Coverage Drone Facility Location Problem Considering Coverage Reliability. Transport. Res. Rec. 2023, 2677, 98–114. [Google Scholar] [CrossRef]
- Caunhye, A.; Zhang, Y.D.; Li, M.Z.; Nie, X.F. A Location-Routing Model for Prepositioning and Distributing Emergency Supplies. Transp. Res. Part E Logist. Transp. Rev. 2016, 90, 161–176. [Google Scholar] [CrossRef]
- Chauhan, D.R.; Unnikrishnan, A.; Boyles, S.D. Maximum Profit Facility Location and Dynamic Resource Allocation for Instant Delivery Logistics. Transp. Res. Rec. 2022, 2676, 697–710. [Google Scholar] [CrossRef]
- Xiao, Y.M.; Zhou, J.C.; Zhu, X.Y.; Yu, F.J. Research on Optimization Method and Algorithm Design of Green Simultaneous Pick-up and Delivery Vehicle Scheduling under Uncertain Demand. Sustainability 2022, 14, 12736. [Google Scholar] [CrossRef]
- Monami, D.R.; Bhaba, R.S. Optimizing a supply chain problem with nonlinear penalty costs for early and late delivery under generalized lead time distribution. Comput. Ind. Eng. 2021, 160, 107536. [Google Scholar]
- Yang, J.Y.; Xing, X.Y. Optimizing a Time-Sensitive Supply Chain with a Power Function Penalty Cost. J. Eng. Proj. Prod. Manag. 2023, 13, 113–124. [Google Scholar]
- Zhang, D.Z.; He, R.Z.; Li, S.Y.; Wang, Z.W. A multimodal logistics service network design with time windows and environmental concerns. PLoS ONE 2017, 12, e0185001. [Google Scholar] [CrossRef]
- Agatz, N.; Bouman, P.; Schmidt, M. Optimization approaches for the traveling salesman problem with drone. Transp. Sci. 2018, 52, 965–981. [Google Scholar] [CrossRef]
- Min, G.L.; Duanmu, J.S.; Zhang, B.; Zhang, L. Multi-target UAV mission planning in military logistics. Chin. Comput. Simul. 2017, 33, 85–89. [Google Scholar]
- Wang, H.; Chen, H.T.; Li, Y.; Li, H.C. Route planning method of plant protection UAV based on Grid-GSA algorithm. Chin. Trans. Agric. Mach. 2017, 48, 29–37. [Google Scholar]
- Xiao, G.; Chen, W.W.; Li, J.Q. Uav cluster task assignment algorithm based on improved QACA. Chin. Mod. Navig. 2019, 10, 28–33. [Google Scholar]
- Gao, S.; Ai, J.L.; Wang, Z.H. Mixed population RRT UAV track planning method. Chin. Syst. Eng. Electron. 2020, 42, 101–107. [Google Scholar]
- Yan, F.; Zhu, X.P.; Zhou, Z. Real-time task assignment of multi-heterogeneous UAVs with simultaneous attack constraints is considered. Chin. Sci. 2019, 49, 555–569. [Google Scholar]
- Tian, Z.; Wang, X.F. Collaborative task assignment of heterogeneous multi-UAV based on multi-gene genetic algorithm. Chin. Flight Mech. 2019, 37, 39–44. [Google Scholar]
- Zhang, Z.F. Research on Optimization of Collaborative Delivery of Trucks and Drones under Urban Floods. Master’s Thesis, Xi’an Technological University, Xi’an, China, 2024. [Google Scholar]
- Yanpirat, N.; Silva, D.F.; Smith, A.E. Sustainable last mile parcel delivery and return service using drones. Eng. Appl. Artif. Intell. 2023, 124, 106631. [Google Scholar] [CrossRef]
- Wei, H.C.; Shi, J.M.; Liu, Z.; Zhang, J.; Liu, C.H. Overview of drone delivery mode and path planning for last mile delivery. Chin. Comput. Syst. Appl. 2023, 32, 1–18. [Google Scholar]
- Ren, X.; Huang, H.; Yu, S.W.; Feng, S.; Yu, G.Q. A review of research on the combination of vehicles and drones for delivery. Chin. Control. Decis. 2021, 36, 2313–2327. [Google Scholar]
- Dorling, K.; Heinrichs, J.; Messier, G.G.; Magierowski, S. Vehicle routing problems for drone delivery. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 70–85. [Google Scholar] [CrossRef]
- Deb, K.; Thiele, L.; Laumanns, L.M.; Zitzler, E. Scalable Multi-Objective Optimization Test Problems. In Proceedings of the 2002 Congress on Evolutionary Computation, Honolulu, HI, USA, 2–17 May 2002; Volume 1, pp. 825–830. [Google Scholar]
- Li, W.H.; Yao, X.Y.; Zhang, T.; Wang, R.; Wang, L. Hierarchy Ranking Method for Multimodal Multi-Objective Optimization with Local Pareto Fronts. IEEE Trans. Evolut. Comput. 2023, 27, 98–110. [Google Scholar] [CrossRef]
- Chen, H.K.; Cheng, R.; Pedrycz, W.; Jin, Y. Solving many-objective optimization problems via multistage evolutionary search. IEEE Trans. Syst. Man Cybern. Syst. 2021, 51, 3552–3564. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Symbol | Description |
|---|---|---|---|
| Set of all demand points. | Loading weight (including the starting point) when UAV leaves node . | ||
| Set of all UAVs. | Required weight at node . | ||
| Decision variable: determine whether drone is from node to node . | Retrieve the weight of goods at node . | ||
| Unit transportation cost of drones. | Loading weight when UAV leaves the starting point. | ||
| The real loading weight of UAV on the path from node to node . | Represent the sum of the time window, the sum of the loading weight, and the sum of the loading volume violated by drone at node , respectively. | ||
| Euclidean distance between node and node . | ,, | Represent the penalty coefficients of the violation of the time window, the loading weight, and the loading volume, respectively. | |
| Be used to judge whether drone is used. | Be used to judge whether node is served by drone . | ||
| NV | The number of drones used. | Represents the time when the drone arrives at node . | |
| Unit start-up cost. | The left and right time windows of node . | ||
| Unit maintenance cost. | The loading weight of drone at node . | ||
| The energy remaining of UAV after completing the delivery task. | The maximum loading weight of drone . | ||
| Average of UAV energy remaining. | The maximum loading volume of drone . | ||
| Number of drones. | The loading volume of drone at node . | ||
| The initial energy of UAV . | The service start-time of drone to node . | ||
| Energy consumption of UAV . | The service time of node . | ||
| Energy consumption of UAV along the path from node to node . | Set of arcs pointing to node . | ||
| The weight of UAV . | Set of arcs pointed by . | ||
| Acceleration of heavy force. | Determine whether drone is from node to node . | ||
| Air density. | Distance from node to node . | ||
| The area of the rotating blade disc. | Determine whether drone is from the starting point and reaches node . | ||
| The number of UAV rotors. | Determine whether drone is from other nodes and returns to the starting point. | ||
| Distance from node to node . | M | An infinite number. | |
| Speed of drone . | The volume of cargo . | ||
| Maximum flight speed of drone . | The maximum volume allowed to be loaded by drone . | ||
| Maximum flight time of drone . | The number of all demand points. | ||
| Maximum flight distance of drone . |
| Performance Index | Value |
|---|---|
| Maximum flying speed | 80 km/h |
| Maximum flight time with a full load | 17 min |
| Maximum flight distance with a full load | 19 km |
| Maximum payload | 5 kg |
| UAV’s warehouse size | 40 cm × 40 cm × 32 cm |
| Medical Supplies | Weight/kg | Length/m | Width/m | Height/m | Volume/m3 | Transport Type |
|---|---|---|---|---|---|---|
| Therapeutic drug | 0.15 | 0.15 | 0.08 | 0.10 | 0.0012 | UAV |
| Detection reagent | 0.05 | 0.15 | 0.08 | 0.05 | 0.0006 | |
| Medical protective products | 0.03 | 0.25 | 0.10 | 0.01 | 0.00025 |
| Number | X | Y | Demand | Recycling Quantity/kg | Recycling Volume/m3 | Left Time Window | Right Time Window | Service Time/min | ||
|---|---|---|---|---|---|---|---|---|---|---|
| A | B | C | ||||||||
| 0 | 57 | 61 | 0 | 0 | 0 | 0 | 0 | 9:00 | 11:00 | 10 |
| 1 | 52 | 62 | 4 | 14 | 3 | 0.25 | 0.00641 | 9:00 | 9:30 | 10 |
| 2 | 55 | 55 | 17 | 13 | 11 | 0.85 | 0.00426 | 9:10 | 9:40 | 12 |
| 3 | 54 | 68 | 3 | 16 | 13 | 1 | 0.00789 | 9:10 | 9:30 | 14 |
| 4 | 58 | 62 | 17 | 9 | 20 | 0.5 | 0.00430 | 9:20 | 9:50 | 15 |
| 5 | 48 | 66 | 15 | 15 | 4 | 0.2 | 0.00500 | 9:50 | 10:20 | 15 |
| 6 | 58 | 59 | 11 | 7 | 20 | 1.5 | 0.00640 | 9:15 | 9:35 | 15 |
| 7 | 54 | 69 | 10 | 11 | 17 | 0.8 | 0.00629 | 9:40 | 10:10 | 17 |
| 8 | 55 | 68 | 15 | 16 | 4 | 0.3 | 0.00485 | 9:00 | 9:30 | 18 |
| 9 | 61 | 66 | 10 | 17 | 23 | 1.5 | 0.00501 | 9:20 | 10:00 | 18 |
| 10 | 59 | 63 | 20 | 5 | 9 | 0.15 | 0.00469 | 9:00 | 10:00 | 18 |
| 11 | 46 | 61 | 12 | 3 | 7 | 1 | 0.00751 | 9:30 | 10:00 | 20 |
| 12 | 62 | 49 | 9 | 10 | 20 | 0.25 | 0.00655 | 9:10 | 9:40 | 21 |
| 13 | 50 | 63 | 5 | 6 | 10 | 1 | 0.00898 | 9:00 | 9:40 | 22 |
| 14 | 54 | 56 | 18 | 8 | 3 | 0.55 | 0.00521 | 9:00 | 9:40 | 22 |
| 15 | 64 | 57 | 10 | 11 | 15 | 0.5 | 0.00440 | 10:00 | 10:30 | 23 |
| Dominant Hierarchy | Objective 1 | Objective 2 | Objective 3 | The Number of UAVs Used | Optimal Task Assignment Scheme and Flight Path Planning Scheme |
|---|---|---|---|---|---|
| 1 | 204.5833 | 5208.4763 | 0 | 10 | Option 1: 0-14-3-0; 0-10-0; 0-2-4-0; 0-9-0; 0-5-0; 0-1-15-13-0; 0-7-12-0; 0-8-0; 0-6-0; 0-11-0; |
| 1 | 204.0560 | 4785.5881 | 0 | 10 | Option 2: 0-14-3-0; 0-10-0; 0-6-4-0; 0-9-0; 0-5-0; 0-1-15-13-0; 0-7-12-0; 0-8-0; 0-2-0; 0-11-0; |
| 1 | 199.0370 | 2569.9683 | 0 | 9 | Option 3: 0-14-0; 0-5-0; 0-1-15-13-0; 0-7-12-0; 0-4-3-0; 0-10-8-0; 0-6-0; 0-2-0; 0-9-11-0; |
| 1 | 200.6287 | 3397.4345 | 0 | 10 | Option 4: 0-14-0; 0-5-0; 0-1-15-13-0; 0-7-12-0; 0-4-3-0; 0-10-8-0; 0-6-0; 0-2-0; 0-9-0; 0-11-0; |
| 1 | 200.6150 | 2576.6985 | 0 | 9 | Option 5: 0-14-0; 0-5-0; 0-1-15-8-0; 0-7-12-0; 0-4-3-0; 0-10-13-0; 0-6-0; 0-2-0; 0-9-11-0; |
| 1 | 157.2881 | 2283.9717 | 24 | 8 | Option 6: 0-13-0; 0-2-0; 0-1-15-12-0; 0-7-9-0; 0-4-3-0; 0-10-8-0; 0-6-0; 0-5-11-14-0; |
| 1 | 193.9231 | 1967.1058 | 183 | 8 | Option 7: 0-14-0; 0-5-0; 0-1-15-13-0; 0-7-12-0; 0-4-3-0; 0-10-8-0; 0-6-0; 0-9-2-11-0; |
| UAVs’ Number | Demand Point | Time Window | Arrival Time | Departure Time | Load on Arrival/kg | Load at Departure/kg | Volume on Arrival | Volume at Departure |
|---|---|---|---|---|---|---|---|---|
| - | 0 | [9:00, 11:00] | - | - | - | - | - | - |
| No. 1 | 14 | [9:00, 9:30] | 9:15 | 9:25 | 2.37 | 0.2 | 0.027 | 0.005 |
| No. 2 | 5 | [9:10, 9:40] | 9:18 | 9:30 | 4.29 | 3.35 | 0.028 | 0.005 |
| No. 3 | 1 | [9:10, 9:30] | 9:14 | 9:28 | 3.35 | 1.85 | 0.048 | 0.041 |
| 15 | [9:20, 9:50] | 9:30 | 9:45 | 1.85 | 1.75 | 0.041 | 0.023 | |
| 13 | [9:50, 10:20] | 9:57 | 10:12 | 4.06 | 2.8 | 0.023 | 0.020 | |
| No. 4 | 7 | [9:15, 9:35] | 9:17 | 9:32 | 2.8 | 1.05 | 0.045 | 0.028 |
| 12 | [9:40, 10:10] | 9:49 | 10:06 | 3.11 | 1.99 | 0.028 | 0.013 | |
| No. 5 | 4 | [9:00, 9:30] | 9:12 | 9:30 | 1.99 | 1.5 | 0.035 | 0.021 |
| 3 | [9:20, 10:00] | 9:36 | 9:54 | 4.94 | 2.57 | 0.021 | 0.012 | |
| No. 6 | 10 | [9:00, 10:00] | 9:13 | 9:31 | 2.57 | 0.45 | 0.058 | 0.033 |
| 8 | [9:30, 10:00] | 9:36 | 9:56 | 2.05 | 1.5 | 0.033 | 0.010 | |
| No. 7 | 6 | [9:10, 9:40] | 9:12 | 9:33 | 2.68 | 0.85 | 0.022 | 0.006 |
| No. 8 | 2 | [9:00, 9:40] | 9:14 | 9:36 | 4.1 | 3.06 | 0.031 | 0.004 |
| No. 9 | 9 | [9:00, 9:40] | 9:15 | 9:37 | 3.06 | 2.5 | 0.046 | 0.023 |
| 11 | [10:00, 10:30] | 9:50 | 10:13 | 2.29 | 0.55 | 0.023 | 0.013 |
| Test Function | Evaluation Index | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| GD | Spacing | HV | IGD | Superior Proportion | |||||
| MIBSO | NSGA-II | MIBSO | NSGA-II | MIBSO | NSGA-II | MIBSO | NSGA-II | ||
| DTLZ4 | 0.1750 | 0.2691 | 0.5180 | 0.8035 | 1.0000 | 0.4773 | 0.5735 | 0.5983 | 100% |
| DTLZ5 | 0.0426 | 0.4380 | 0.1145 | 0.2848 | 0.2354 | 0.8257 | 0.0400 | 0.1401 | 75% |
| DTLZ7 | 0.0308 | 0.0127 | 0.3012 | 0.2209 | 0.5981 | 0.2409 | 0.0588 | 0.1638 | 50% |
| Superior proportion | 66.7% | 66.7% | 66.7% | 100% | \ | ||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Yin, S.; Luo, L.; Qiao, X. Research on Multi-UAV Task Assignment Based on a Multi-Objective, Improved Brainstorming Optimization Algorithm. Appl. Sci. 2024, 14, 2365. https://doi.org/10.3390/app14062365
Wang X, Yin S, Luo L, Qiao X. Research on Multi-UAV Task Assignment Based on a Multi-Objective, Improved Brainstorming Optimization Algorithm. Applied Sciences. 2024; 14(6):2365. https://doi.org/10.3390/app14062365
Chicago/Turabian StyleWang, Xiaofang, Shi Yin, Lianyong Luo, and Xin Qiao. 2024. "Research on Multi-UAV Task Assignment Based on a Multi-Objective, Improved Brainstorming Optimization Algorithm" Applied Sciences 14, no. 6: 2365. https://doi.org/10.3390/app14062365
APA StyleWang, X., Yin, S., Luo, L., & Qiao, X. (2024). Research on Multi-UAV Task Assignment Based on a Multi-Objective, Improved Brainstorming Optimization Algorithm. Applied Sciences, 14(6), 2365. https://doi.org/10.3390/app14062365