Abstract
With the continuous development of science and technology, UAV technology has been widely used in various fields. As an essential part, light and small UAV platforms have the advantages of being small, lightweight, and easy to operate and thus have been widely used in aerial photography, monitoring, rescue, and other fields. However, the traditional data transmission method can no longer meet the demand for the data transmission speed and stability of small and light UAV platforms. Wireless optical communication has the advantages of being high-speed and license-free, as well as having a large bandwidth strong anti-interference ability, and good confidentiality. Therefore, this paper aims to study high-speed data transmission technology for light and small UAV platforms to improve their transmission speed and stability. In this paper, the characteristics and advantages of UAV airborne laser communication are first elaborated to illustrate the advancements and importance of data transmission technology based on light and small UAV platforms. Then, the composition of a UAV airborne laser communication system is clarified to illustrate the feasibility of conducting airborne laser communication research. Then, the current domestic and international research status of people on light and small UAV airborne laser communication high-speed data transmission systems is reviewed, and its key technical features are analyzed. Finally, the prospects for its application and development trend are investigated.
1. Introduction
With the rapid development of science and technology, drone technology is becoming more widely used in various fields. Light and small UAVs have gained significant attention and applications due to their portability, flexibility, and high efficiency in aerial photography, agriculture, rescue, and other fields. High-speed data transmission technology has become a key supporting technology in these applications. When performing tasks, light and small UAVs must efficiently and in real-time transmit a large amount of sensor data, images, videos, etc., to ground stations or other devices. Therefore, high-speed and stable data transmission has become essential in light and small UAV technology. Currently, the commonly used data transmission technologies are Wi-Fi, Bluetooth, Zigbee, etc. These technologies still need to fully meet the needs of light and small UAV applications regarding transmission rate, transmission distance, and stability. Traditional radio frequency (R.F.) communication is susceptible to magnetic field interference in high-voltage lines and communication base stations, making real-time and efficient communication difficult. In addition, the broadcasting characteristics of R.F. communication quickly lead to co-frequency interference and safety issues, limiting the safety performance of UAV communication. On the other hand, wireless optical communication is characterized by a high-speed rate, large bandwidth, excellent anti-interference, and good confidentiality, as well as being license-free. Combining it with UAV technology can significantly improve communication security, reduce dependence on the environment, and satisfy people’s usage needs. In terms of volume, cost, ease of use, and environmental adaptability, a UAV wireless optical communication system shows significant advantages, especially in the application of small UAVs and multi-rotor UAVs. It will become increasingly important in the future in the military, agriculture, commerce, and other fields.
Compared to large UAV platforms:
- Light and small UAVs are typically subject to tighter size and weight constraints, so their high-speed data transmission systems must be more compact and lightweight.
- For light and small UAVs, the communication distance between them and the ground control station is closer due to the limitations of their flight altitude and speed, thus requiring more real-time performance. Large UAVs, on the other hand, usually need to communicate over longer distances.
- There is a difference in the following aiming device: the following aiming stabilizing device should be added with gyroscopic stabilization to make a gyrostabilizing platform, and the following aiming device is more challenging compared to interstellar and interstellar terrestrial devices.
- Large UAVs are usually used for tasks such as military reconnaissance and cargo transportation, while light and small UAVs are more often used for tasks such as aerial monitoring and terrain mapping, so there are differences in the application scenarios of their high-speed data transmission systems.
Specific application scenarios for lightweight and small drones are as follows:
- In existing metropolitan area networks, to extend or connect to new networks, these links usually do not reach the end user but are used for the network’s core services. The use of FSO to extend an existing metropolitan area fiber optic cable loop so that it can subsequently expand the connection of new wireless networks and the formation of a wired, wirelessly integrated optical transmission network is the best way to provide high-speed data transmission services directly to the end user.
- Enterprise LAN segments are often separated by buildings or roads between buildings. The simplicity of FSO equipment installation makes it ideal for realizing the interconnection of LAN segments within an enterprise and easily solving the problem of trenching and cabling brought about by the complex terrain between buildings.
- Investments in network wiring are skewed towards backbone cables and the center of a network, with little attention paid to the needs of users at the edge of a network. In the international arena, although 90% of buildings in a city are within 1.5 km from a backbone cable, most of them cannot be connected, not only because of the high cost of USD 100,000–200,000 per kilometer of fiber optic cable laying costs but also due to the fact that many cities, in order to avoid traffic congestion, air pollution, tree transplantation, and the destruction of historical sites, have been gradually restricting the digging of trench laying for fiber optic cables so as to make it more end-user-oriented. The last kilometer is quite difficult, so FSO is undoubtedly an important technical choice to solve this contradiction.
Since the 1970s, the U.S. Air Force Research Laboratory (AFRL) has been exploring airborne laser communication technology. The AFRL has successfully developed several laser communication terminals while confirming the feasibility of airborne laser communication. In addition, the Jet Propulsion Laboratory (JPL) [1], Lincoln Laboratory, German Aerospace Agency (DLR), and U.S. Naval Laboratory (NRL) have conducted in-depth research on exploring UAV-borne laser communication technology. With the growing maturity of UAV optical communication technology, expanding its application areas and scope is becoming increasingly important. Within this domain, long-distance and high-speed transmission technology has been receiving increasing attention. Compared with space and ground platforms, UAV platforms have the characteristics of a high moving speed, high levels of vibration, a harsh environment, and severe atmospheric influence and have strict requirements on loaded equipment’s size, weight, and energy consumption. In contrast, higher transmission rates are often required in practical applications. Therefore, the development of airborne laser communication systems needs to comprehensively consider a variety of influencing factors at present in this field to cope with the impact of the above technology research direction: optical communication modulation and demodulation technology; laser communication terminal lightweight and miniaturization technology; wireless visual communication capture, tracking, and targeting technology; all-weather technology, and so on. This paper outlines the international and domestic research progress and development history of wireless optical communication high-speed transmission technology, summarizes the elemental composition of its system, discusses the critical issues of lightweight and small-sized unmanned aerial vehicle (UAV) visual communication based on the existing theories, and looks forward to the future prospects and research directions of UAV visual communication.
2. Components of High-Speed Data Transmission for Lightweight and Small UAV Platforms
The critical functional modules of the wireless optical communication system for small and light UAVs are shown in Figure 1. The composition of the small UAV airborne optical communication system mainly contains the following three major parts: a laser transceiver system, a tracking and aiming system, and a communication subsystem. Among them, the laser transceiver system resides in the core position and shoulders the task of transmitting and receiving laser signals, including the subsystems of signal light transmitting, beacon light sending, signal light receiving, and beacon light receiving. Signal light is used to transfer data, and beacon light is used to indicate the position and distance of the target. The tracking and aiming system is used to realize the seeking and tracking functions of the laser communication terminal. It includes a coarse- and fine-tracking detection unit and a servo system. The coarse- and fine-tracking detection units are responsible for fast and rough target tracking. At the same time, the servo system is responsible for the precise control of the aiming direction and position. The communication subsystem is responsible for processing and transmitting data for laser communication, and it includes units for signal coding, modulation, demodulation, and storage. These units process the raw data to make them suitable for laser transmission and then demodulate, decode, and store them at the receiving end to recover the raw data. Among the three subsystems, capture alignment tracking is the prerequisite, the laser transceiver system is the system’s core, and the modulation and demodulation units guarantee high-speed data transmission for optical communication.
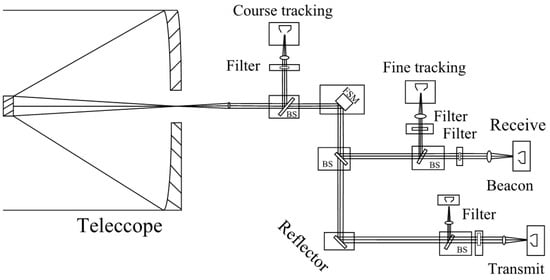
Figure 1.
Composition of laser communication system for light and small unmanned aerial vehicles.
2.1. Capture Alignment Tracking Unit
An optical communication capture, tracking, and alignment unit (ATP system) is a critical technology for visual communication. The ATP system can be divided into coarse- and fine-tracking units, effectively tracking the communication object while simultaneously capturing the signal and stabilizing the communication. The crude tracking unit mainly carries out preliminary capture, which usually uses optical components such as beam splitters, mirrors, lenses, and other visual elements to control the beam’s propagation direction and the focal point position to carry out tracking. After capturing the signal, the coarse-tracking unit can obtain the corresponding signal and the localization. The fine-tracking unit is based on using crude tracking to carry out high-precision and fast target tracking. The fine-tracking unit mainly carried out the rapid acquisition of the target position and accurate tracking through the use of a high-sensitivity position sensor and a high-speed response control system. The ATP system carried out high-precision and stable target tracking in a complex and changing environment by comprehensively applying the multidisciplinary technologies of optics, electronics, control theory, etc., ensuring free-space optical communication stability. A typical wireless laser communication APT system is shown in Figure 2.
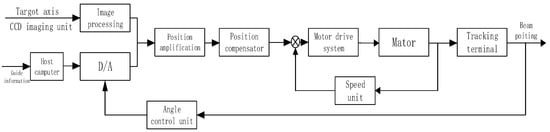
Figure 2.
Diagram of light and small UAV laser communication APT system.
2.2. Optical Receiving and Transmitting Systems
The optical receiving and transmitting system for lightweight and small-sized UAV visual communication is the core component of UAV optical communication, which includes two main parts: receiving and sending optical signals. As shown in Figure 3, for the receiving part, its main task is to receive optical signals from optical communication devices and convert them into electrical signals. This process requires photodetectors with high sensitivity and low noise performance and demodulators with efficient anti-interference capability and high demodulation accuracy. Through the concerted work of these components, the received optical signals can be accurately reduced to the original electrical signals, providing stable and reliable data transmission for the UAV. For the transmitting section, its main task is to convert an electrical signal into an optical signal and send it through an optical antenna. This process requires lasers with high modulation accuracy and broad bandwidth characteristics, as well as signal modulators with efficient stability and low noise performance. Through the combination of these components, electrical signals can be converted into stable and reliable optical signals to realize long-distance wireless communication between UAVs and other devices. The optical antenna is mainly responsible for the transmission and reception of signal light and beacon light to improve the transmission and reception efficiency.
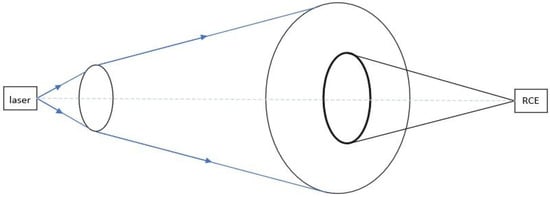
Figure 3.
Schematic diagram of transmitting and receiving antennas.
At this stage, the modulator carries out the conversion of random electrical signals into electro-optical signals by adjusting the phase and amplitude of the laser carrier. The core responsibility of the optical receiving system is to receive the signals sent from the transmitter accurately, which is usually carried out by using a spatial optical coupling device consisting of a lens or an array of lenses. However, the laser beam gradually diverges after atmospheric transmission, resulting in a more prominent spot at the receiving end. Therefore, the adequate reception of optical signals by an optical receiving system is particularly critical in the case of long-distance communications or poor channel environments.
2.3. Modulation and Demodulation Units for Optical Communication Terminals
Modulation and demodulation are critical aspects of high-speed data transmission optical communication systems. Their primary purpose is to convert information into optical signals suitable for transmission in optical fibers and to restore them to the original information at the receiving end. The modulation and demodulation units of light and small UAV visual communication are two of the core components of realizing visual communication, and the modulation and demodulation units in visual communication significantly impact the data transmission speed. By optimizing the performance of the modulator and demodulator and increasing the transmission rate of the optical communication system, faster and more efficient data transmission can be achieved.
Modulation unit: The role of the modulation unit is to convert electrical signals into optical signals. It uses a laser as the light source, converts the electrical signal into an optical signal through a modulator, and transmits it using an optical antenna. The modulation unit adopts digital modulation technology, such as COFDM modulation and demodulation technology, which has the advantages of a strong anti-jamming ability, a long transmission distance, and resistance to multipath fading.
Demodulation unit: The role of the demodulation unit is to restore the received optical signal to an electrical signal. It uses a photodetector as the receiver, and signals, through the demodulator, will be converted into electrical signals and output to the subsequent processing circuit. The demodulation unit employs a photodetector with high sensitivity and low noise performance and a demodulator with high-efficiency anti-interference capability and high demodulation accuracy to reduce the received optical signal. The small and lightweight UAV’s visual communication modulation and demodulation units are characterized by being small and lightweight, having high performance, and having low power consumption. They can be widely used in UAVs, robots, and remote-controlled vehicles. At the same time, these units support high-speed mobile data transmission. They can maintain a stable communication connection in motion, which provides an essential technical guarantee for high-speed data transmission in UAVs.
3. Current Status of Research
3.1. Air-To-Ground Optical Communications
In 2013, a Korea Electronics and Telecommunications Research Institute (KETRI) team developed a specialized optical communication terminal for UAVs and ground terminals. This device uses integrated optical technology to simultaneously emit beacon and signal light. In the experiment, this terminal successfully constructed a full-duplex optical link with a transmission distance of 50 m and a rate of 1.25 Gb/s without error code transmission. The realization of this technology brought a breakthrough in the field of UAV communication and promoted the application and development of UAVs in various fields [2].
In 2015, the Institute for Communication and Navigation of the German Aerospace Center (DLR), in cooperation with Airbus Space and Defense Europe, promoted two projects, ALCOS and DOD Fast. The ALCOS project aims at wireless optical communication between UAVs and satellites, with a target communication rate of 1.8 Gb/s and a communication range of up to thousands of kilometers. The DOD fast project focuses on UAVs and ground-based wireless optical communication, with an expected communication rate of 1.25 Gb/s and a maximum communication distance of 79 km. These projects will bring significant breakthroughs and advancements for future UAV communication technology [3].
In 2016, Quintana and his team designed a novel tracking system for air-to-ground laser communication experiments. As shown in Figure 4, the system consists of two key components: a coarse-tracking module constructed by a CCD camera and an exemplary tracking module consisting of a spatial light modulator and a position sensor (PSD). These two modules work synergistically to improve the tracking accuracy and reliability significantly. In the air-to-ground laser communication test, a 2 Mb/s optical communication link was successfully established with a communication distance of 300 m. In this test, the BER of the system was about 2 × 10−4, proving its good stability while maintaining good communication quality. This research has significantly improved the performance of laser communication systems [4].
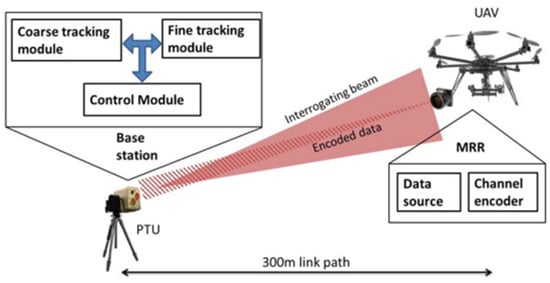
Figure 4.
Schematic diagram of uncrewed aerial vehicle and ground-end optical communication.
In 2017, Facebook partnered with Germany’s Mynaric to test an air-to-ground laser communications link. In this test, a Cessna 310 aircraft was equipped with a 70 mm-diameter laser communication terminal, and the ground station was fitted with a 200 mm-diameter laser communication terminal. The plane flew at a speed of 206 km/h during the test, 1.8 times higher than the speed tested in 2016. However, the quality of the communication was affected by the aircraft’s high speed, as well as vibrations in the body and atmospheric turbulence. The communication rate reached 10 Gb/s, and the communication distance was 9 km. This experimental result clearly shows that factors such as the fast flight of the airborne platform, the uncertain trajectory, and random errors from attitude changes cause significant difficulties in the short and stable establishment of the laser link [5].
In 2017, the Thirty-fourth Research Institute of China Electronics Technology Group Corporation (CETC) developed an air-to-ground wireless laser communication system for small uncrewed aerial vehicles (UAVs) and proposed a complete system design. The system is based on a small rotary-wing UAV platform and can carry out stable signal transmission at a communication distance of 6.7 km and a communication rate of 1.25 Gb/s. In addition, the institute did an outfield test on signal transmission quality for in-depth testing and analysis. In the following year, CLP 34 successfully conducted a laser communication test on an eight-rotor UAV. The system achieved a communication rate of 100 Mbps at an air-to-ground communication distance of 6.7 km. Under reasonable weather conditions, the system’s packet loss rate was only 0.3%, and it took only 10 s to establish a communication connection, demonstrating its high efficiency and reliability. These results show that UAV laser communication technology has significantly progressed in terms of miniaturization and high efficiency [6]. A physical diagram of the device is shown in Figure 5.

Figure 5.
Physical image of unmanned aerial vehicle’s laser communication equipment.
In 2018, Prof. Xizheng Ke of Xi’an University of Technology and his research team conducted experiments on near-ground coherent optical communication, focusing on automatic control, polarization measurement and control, adaptive optics, and other technologies of the APT system. The experiments set the communication link distances to 600 m, 1.3 km, 10.2 km, and 100 km and used communication light with a 1550 nm wavelength. The experiments used the BPSK-modulated outlier detection method with a communication rate of 100 Mbps and successfully transmitted high-definition videos and images. These experiments are significant for developing coherent optical communication technology and applying it in near-earth communication environments [7,8].
In 2019, the Thirty-fourth Research Institute of China Electronics Technology Group Corporation developed an airborne laser transmission technology for fast lift-off base station UAVs, realizing a communication distance of 5 km. which shows that the technology enables the UAV end and the ground end to automatically scan and quickly capture to complete tracking and targeting, accomplishing the establishment of a communication link within 8 s to meet the rate requirement. In addition, the institute conducted an extensive file transmission test, and the UAV-side and ground-side access points achieved an average transmission rate of 99.79 Mb/s, which enabled large files to be transmitted in seconds. The success of this technology demonstrates the strong potential of UAV laser communications for rapid deployment and high-speed transmission [9].
In 2020, Antonello et al. designed a high-precision targeting and tracking system for on-orbit laser communication. The communication model is shown in Figure 6. The system adopts the form of coarse and fine two-stage aiming, and the total weight of the terminal is 1.8 kg. The timing error of the system was less than 10 μrad in the simulated external interference environment test [10].
Figure 6.
Unmanned communication model.
In 2023, Shao Long. proposed a joint optimization algorithm based on UAV dynamic trajectory and transmit power. The communication model is shown in Figure 7, and the link transmission rate was analyzed under different visibility conditions. The results show that the FSO and RF links reach full-speed transmission when the visibility is 1.7 km. The proposed algorithm shows a 447.5% improvement in the average communication rate compared to the average communication rate of a fixed relay device and a 32.5% improvement in the average communication rate compared to the average communication rate of a link with a non-powered optimization algorithm [11].
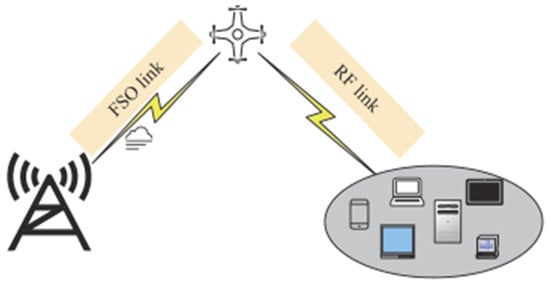
Figure 7.
FSO/RF communication link system model.
3.2. Air-To-Air Optical Communications
In 2013, Changchun University of Science and Technology conducted a dynamic optical communication link test between airplanes. In the test, a dual fixed-wing airplane carrying an optical communication terminal, flying at an altitude of 4.7 km and with a distance of more than 100 km between the airplanes, successfully established a link connection within 20 s. When the data transmission rate is 2.5 Gbps and 1.5 Gbps, the BER is lower than 6.2 × 10−5 and 10−7, respectively, which meets the test objectives. This test realizes laser high-speed information transmission between multiple nodes and provides essential support for developing a laser communication networking system. However, the test was not conducted in a complex environment, and the UAV optical communication payload faced challenges from various unfavorable factors, such as the airborne platform and external space environment [12,13].
In 2014, General Atomics launched the Air-Based Laser Communications System Demonstration Project, which planned to install laser communication equipment on the MQ-9 UAV platform. After two years of ground testing, the program completed flight test validation in 2017. By 2020, the company had completed the communication part of the test. It established a low-interception-rate and low-detection-rate UAV communication link, which was realized at 1.064 μm and 1.550 μm optical wavelengths, respectively [14,15].
In 2014, Xizheng Ke from Xi’an University of Technology successfully developed a wireless laser communication integrated operational machine. The core structure of the working machine is a building block design based on FPGA. On the transmitter side, it utilizes OOK (on–off keying) modulation. The receiving end performs a ping-pong operation through two FIFOs (first-in–first-out queues). This design controls the speed of information processing and restores the clock signal. The signals are processed by oversampling eight times, allowing the clock signal to be recovered. Duplex communication is realized, capable of transmitting two videos and 150 voice signals simultaneously at a transmission rate of up to 10 Mb/s, demonstrating excellent utility [16].
In 2019, a research team from the University of Southern California used orbital angular momentum with multiple input and multiple output techniques to enhance the performance of an optical communication link between a UAV and a ground base station. As shown in Figure 8, in the experiment, a dual-channel 40 Gb/s high-speed link was realized using an inverse modulation reflector on the UAV, and the BER was controlled within an acceptable range, with a communication distance of 100 m [17].
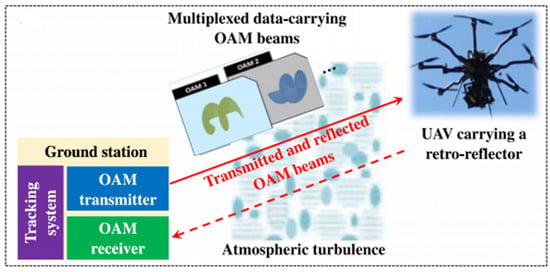
Figure 8.
Schematic diagram of the communication link between the ground station and drone through atmospheric turbulence communication.
3.3. Other Forms of Optical Communication
In 2016, Tang Yuchun et al. designed a wireless optical communication system for shipboard environments capable of transmitting real-time voice, data, and image information. The system was tested under different weather conditions, such as sunny days, cloudy days with light rain, and foggy days. It achieved a communication rate of 155 Mb/s and a distance of up to 8.5 km [18].
In 2021, Changchun University of Science and Technology conducted a one-point-to-multipoint communication verification test. The airship in the test was at an altitude of 200 m and realized 2.5 Gbps of one-to-many high-speed laser communication over a distance of 2 km [19].
Light and small UAV optical communication technology has become a rapidly developing field in recent years and covers a variety of communication forms, including air-to-air optical communication, air-to-ground optical communication, and some special optical communication forms, such as star-to-air optical communication and shipboard optical communication. In this paper, we provide an overview of the development of high-speed data transmission technology for lightweight and small UAV platforms, focusing on their classification according to the differences in their communication forms and introducing them in detail according to chronological order. At the same time, we pay close attention to the key parameter of communication rate to comprehensively analyze the current status and future development trend of optical communication technology for small and light UAVs.
4. Research on Critical Technologies
From analyzing the comprehensive research status at home and abroad, we found that, in terms of communication payload airborne applications, the following limitations and improvements mainly exist at this stage in the study of lightweight and small-sized uncrewed aircraft optical communication: (1). With the continuous development of unmanned aircraft technology, people need to realize high-speed and stable data transmission to meet the needs of real-time monitoring, data collection, and other applications. Therefore, in practical applications, the high-speed data transmission capability and stability of optical communication need to be further improved. (2). The high speed, uncertain trajectory, and random errors generated by changes in the platform’s altitude exhibited by the airborne platform in flight pose a significant challenge to the rapid establishment of laser links. These factors increase the difficulty of establishing stable communication links in dynamic environments. (3). UAVs have a limited payload, so reducing the size and weight of the payload while maintaining the performance of the laser communication payload is critical to the successful establishment of links. (4). The environmental factors faced by UAV optical communication payloads include the unfavorable factors of the airborne platforms themselves and the negative impacts of the complexity and variability in the external space environment. These factors include, but are not limited to, vibration, temperature changes, atmospheric disturbances, etc., all of which may impact the performance of a communication system. Therefore, the design of these systems must consider these factors to ensure they can operate stably in various environments.
Modulation and demodulation techniques, space environment adaptability techniques, capture tracking alignment techniques, and lightweight and miniaturized design techniques are the keys to solving the issues.
4.1. Modulation and Demodulation Technologies
In optical communication, modulation and demodulation are the core technologies that realize high-speed data transmission in visual communication. Modulation and demodulation load information signals onto light waves and extract them at the receiving end. According to different application scenarios and transmission requirements, optical communication modulation and demodulation technology have a variety of classifications and realization methods, for example, direct, indirect, single-, and multi-wavelength modulation technology, such as direct modulation technology, indirect modulation technology, etc.
Direct modulation technology involves loading the information signal to be transmitted directly onto the carrier frequency of the light wave. It represents the information signal by controlling the intensity or phase of the light wave. This modulation method is simple and easy to implement, but the bandwidth is limited and easily affected by fiber nonlinearity and noise. The indirect modulation technique involves carrying out the modulation of light waves by external interference or controlling specific parameters of light waves. This modulation method can be used for the simultaneous processing of multiple signals, but it requires additional modulators and control circuits and, therefore, has a higher cost. Single-wavelength modulation technology uses only one wavelength of light for information transmission in optical communication. This modulation method can achieve high-speed and long-distance transmission, but its transmission capacity is limited and easily affected by fiber nonlinearity and noise.
4.1.1. IMDD Communication System
IMDD systems have become the preferred choice for most of today’s short- and medium-distance optical communications or low-capacity communications due to their simple system structure. A complete IMDD system can be divided into three parts: the transmitter, the transmission channel, and the receiver. Since a simple single PD is required for optical signal reception at a single receiver in an IMDD system, the difference lies mainly in the system structure at the transmitter side, the fiber type, and the DSP at the transmitter/receiver side. According to the different structures of the transmitter side, IMDD systems can be divided into two categories: systems based on directly modulated lasers (DMLs) and systems based on external modulators [20].
4.1.2. Coherent Optical Communication Technology
Coherent optical communication adds the dimension of phase to the dimensions involved in carrying information compared to IMDD systems. The transmitter in coherent optical communication usually has an externally modulated structure. The receiving end, on the other hand, usually consists of a photocoupler and a balanced photodetector (BPD). The transmitter side of coherent optical communication is roughly similar, while the receiver side can be categorized into heterodyne receivers and homodyne receivers according to the relationship between the LO wavelength and the wavelength of the optical carrier wave that carries the signal.
Wei Yi, researcher from Fudan University, successfully transmitted 100 Gbit/s and 125 Gbit/s PDM-QPSK signals in an RoF system at a frequency of 22 GHz using the real-time processing of an optical transport network [21] and realized error-free transmission. Researchers, including Ehsan Esra, from Universiti Teknologi, Malaysia, designed a transceiver system using differential quadrature phase shift keying, carrier-suppressed non-nulling modulation, dual binary coding, RoF, and dense WDM techniques. A constellation diagram, an eye diagram, the BER, the optical signal-to-noise ratio requirement, and the receiver’s sensitivity were analyzed [22]. The results show that a maximum data rate of 792.64 Tbps was achieved using one-channel dense wavelength division multiplexing, and the maximum transmission distance was extended to 1600 km with a BER of 10−12. Ragheb AmrM et al. from King Saud University successfully realized the transmission of a 6 Gbaud orthogonal phase shift keying signal by fusing RoF and RoF-FSO and measured the relationship between the BER and error vector magnitude of the signal under different densities of smoke FSO channels [23]. The results show that the visibility range can reach one hundred meters under error-free transmission.
4.2. Capture, Alignment, and Tracking Technologies
Optical communication capture, tracking, and alignment technologies are essential for visual communication. The main goal of this technology is to achieve stable, reliable, and highly efficient optical signal transmission over long distances while overcoming optical signal loss or instability due to various factors. Capture technology is primarily concerned with discovering and roughly localizing a target. This is usually accomplished by establishing a relatively large search range, scanning using a coarse tracking system, and then using an exemplary tracking system for more precise aiming and tracking once the transmitted signal is detected. Tracking techniques, however, involve continuously tracking a target once it has been captured. This involves the real-time measurement and prediction of information such as the target’s position, velocity, and acceleration to ensure that the optical signal is transmitted continuously and stably.
Airborne laser communication platforms place higher demands on APT (acquire, point, and track) systems due to their strong maneuverability and high vibration characteristics. These factors directly affect the continuous communication capability of these systems. A wireless laser communication system must be optimized to reconstruct efficiently and capture signals quickly and stably when a link is interrupted. To address the above problems, studying atmospheric turbulence characteristics is the key to solving atmospheric-related tracking problems. Meanwhile, fast-response mirrors can be used to improve the tracking accuracy of an airborne platform, and the interference of stray light can be weakened by using ultra-narrow band filters.
In the exploration of capture, tracking, and alignment technology, Min Zhang of Changchun University of Science and Technology proposed an improved beaconless capture algorithm that uses beaconless capture process, that continuously adjusts the visual axis of the two communication terminals so that it can detect the optical signal from another communication terminal and finally realize an optical closed loop. The scanning method adopts a composite spiral, and the use of such a sub-area scanning method can make the capture uncertainty domain expand [24]. The scanning method assumes a composite spiral, and this sub-area scanning method can make the capture uncertainty domain grow. Guo Aiyan. designed a capture process at the Overall Design Department of Beijing Space Vehicle. They proposed the effect of visual axis jitter on the capture time and capture probability [25]. Gao Yinan of Changchun University of Science and Technology simulated and experimentally verified the fiducial-free spiral capture scanning technique, improving the stability of follow-on aiming [26]. Comprehensive studies have found that stable and reliable tracking effects can be achieved on high-speed maneuvering platforms through in-depth research to understand the characteristics of atmospheric platforms and study and formulate tracking schemes with high adaptability and robust targeting.
4.3. All-Weather Technology
The unfavorable factors faced by airborne platforms include high vibration frequencies, the effects of electromagnetic interference, complex geographic environments, and unstable power supply environments. In addition, harsh external space environments also pose challenges to the design of airborne laser communication systems. These environmental factors include extreme temperature changes, barometric pressure changes, high winds, heavy rain, sand, dense fog, and the atmospheric boundary layer, which may co-exist and have compound effects, adding many difficulties to the design of airborne laser communication systems. An unmanned airborne laser’s communication payload must maintain good high-speed communication performance under the compound influence of various unfavorable factors. This requires a highly environmentally adaptable system that is robust and capable of stable operation under different extreme conditions.
From the error perspective, in a study by Jiang Huilin. from the Changchun University of Science and Technology, the conversion relationship between the false symbol rate and the BER in atmospheric optical communication systems is first derived. Then, by analyzing the Shannon limit communication rate of visual communication in an atmospheric channel, the atmospheric channel bandwidth is emphasized as a critical technical parameter affecting laser communication. Then, the pulse state interval modulation coding method is proposed, and its structural characteristics are analyzed. Finally, the feasibility of PSIM (Polarized Spectral Intensity Modulation (PSIM) is a new technique for obtaining polarization spectral information, and measurement data processing is one of the key modules of a PSIM polarization spectrometer) and the importance of atmospheric channel bandwidth are verified through communication experiments in harsh environments. The experimental results show that real-time feedback of channel characteristics is a crucial prerequisite for realizing all-weather laser communication [27].
To maintain the stability of the time axis of an airborne optical communication system undergoing strong vibrations, the design of a precise and environmentally applicable mechanical structure is essential, and the use of a gyroscopic stabilization system and a highly efficient vibration-damping system should also be considered. Using a hermetically sealed structure ensures the system resists high and low air pressure variations. The overall structural design should effectively reduce the wind disturbance moment caused by high wind speeds. In terms of installation, the shape and structure of the fairing should be considered when designing it to minimize the impact of airflow on the UAV by reasonably selecting and evaluating the installation location. By optimizing the fairing’s design, the influence of the atmospheric advective layer effect on the system’s performance can be reduced.
4.4. Lightweight and Miniaturization Technologies
The weight of airborne laser communication terminals is generally in the tens of kilograms, with a power consumption of more than a hundred watts. Internationally, the weight of UAV laser communication loads has been reduced to less than 10 kg. Still, domestic airborne laser communication loads have not yet fully met the application requirements of various UAVs. Therefore, there is a pressing need to develop lightweight and miniaturized laser communication payload design technology. An integrated design approach can substantially increase the carrying space of UAVs, and due to a reduction in the load weight, it simultaneously improves the flexibility of UAV attitude adjustment and promotes the engineering application process of airborne laser communication payloads. Regarding miniaturization technology, the integrated design of optical communication terminals, such as the interstellar laser communication terminal developed by the Shanghai Institute of Optical Precision Machinery of the Chinese Academy of Sciences, can be considered. This integrated design without an independent beacon light not only maintains communication performance but also realizes the weight and volume reductions of the system. With a mass of 7.5 kg and a power consumption of 95 W, the terminal can recognize interstellar optical communication with a communication rate of 100 Mbit/s. The communication terminal has successfully established a stable double interstellar communication link through on-orbit self-test and optical axis calibration [28].
The coarse and fine two-stage ATP trapping system is bulky, and its optical–mechanical structure is very complex, which makes it difficult to use for maintenance and rapid deployment. Therefore, the two stages can be simplified into a first-stage capture mechanism using a flow-checking galvanometer and a manually assisted capture method to accomplish the ATP task.
4.5. Atmospheric Channel Modeling
Due to atmospheric turbulence effects, when a laser beam is transmitted into the atmosphere, the light intensity at the receiving end undergoes random undulation, i.e., a light intensity scintillation effect, which leads to signal attenuation and the deterioration of the received signal quality at the receiving end. Therefore, in order to improve the performance of the system, it is essential to establish channel models under different atmospheric turbulence conditions. Existing channel models include log-normal distributions, gamma–gamma distributions, negative exponential distributions, and so on. These distribution channel models are generally represented by probability density functions.
4.5.1. Log-Normal Distribution
A log-normal distribution describes the scintillation and decay statistics in a weakly turbulent region, and its probability density function is expressed follows [29]:
where is the logarithmic light intensity variance, is the value of the light intensity at the transmitter end, and I is the normalized light intensity value arriving at each receiver.
4.5.2. Gamma–Gamma Distribution
Since the log-normal distribution is limited to weak turbulence, KOLMOGOROV A N proposes a Gamma–Gamma channel model based on the modified Rytov theory, in which light intensity fluctuations are developed as a product of two stochastic processes, with the probability density function expressed in terms of the following:
where u and β denote the large- and small-scale scattering coefficients, respectively, and (∙) is the second type of modified Bessel function.
4.5.3. Negative Exponential Distribution
For the case of strong turbulence with a link length of a few kilometers, the signal amplitude follows a negative exponential distribution of the signal strength with a probability density function with the following expression:
We believe that the future direction of atmospheric turbulence modeling research is as follows [30]:
- Measurements of the actual atmospheric turbulence characteristics to obtain more statistical parameters of atmospheric turbulence and to promote the research and development of wireless optical communication in actual atmospheric turbulence conditions.
- An analysis and comparison of the transmission characteristics of different light sources in different atmospheric turbulence conditions to explore the influence mechanism of atmospheric turbulence on optical signal transmission and improve the ability of these systems to suppress atmospheric turbulence.
- Research on high-accuracy atmospheric turbulence parameter measurement instruments and, at the same time, the development of high-sensitivity, high-resolution atmospheric turbulence characteristic measurement techniques and methods so as to improve the accuracy of atmospheric turbulence parameter measurement in the actual atmosphere.
Having studied and analysed the key technology components in depth, we can draw the following summary. These technologies, both at present and in the future, play a crucial role. Table 1 shows a detailed summary of these key technologies.

Table 1.
Summary of key technology studies.
5. Conclusions
This paper describes the research on UAV optical communication carried out in recent years, introduces the elemental composition and working principle of visual communication, summarizes and organizes the communication transmission rate and distance as the primary technical parameters, and synthesizes the research status at home and abroad, finding that, since 2013, for lightweight and small-sized uncrewed aerial vehicle (UAV) wireless optical communication systems, their application scenarios have been constantly enriched. At the same time, the requirements for light and small-sized UAV’s communication distance and communication rate have also gradually increased. Given the shortcomings of the existing technology, some feasible technical solutions and development proposals are put forward. For example, the adoption of high-speed data transmission protocol and advanced modulation and demodulation technology can improve the transmission rate and stability; the adoption of all-weather technology and stable tracking and alignment technology can increase the transmission distance and anti-jamming ability; and the lightweight and miniaturization technology can reduce the load and delay of UAVs. This has a certain referability.
In the future, with the continuous development of UAV technology and the constant expansion of application scenarios, lightweight and small UAV high-speed data transmission technology will face more challenges and machinery. We expect that more advanced high-speed data transmission technologies will emerge to provide more stable, efficient, and reliable data transmission support for light and small UAV applications. The next step in advancing high-speed data transmission technology for UAVs should focus on the integration and validation of the technology. This includes integrating new optical signal transmission technologies, smaller optical communication devices, optimized UAV positioning and tracking algorithms, and advanced data processing and analysis techniques to form a complete and efficient data transmission system. Subsequently, it should be tested in an actual UAV environment to ensure the effectiveness and reliability of the technology. It is also necessary to consider how these techniques can be better applied to actual UAV communication missions.
Author Contributions
Conceptualization, D.J. and S.B.; methodology, D.J.; software, D.J. and X.Y.; investigation, D.J. and G.H.; writing—original draft preparation, D.J.; writing—review and editing, D.J., S.B., X.Y., X.L., G.H. and J.H.; project administration, S.B. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported in part by the Changchun University of Science and Technology Youth Fund, Project Code: XQNJJ-2019-01; in part by the Jilin Science and Technology Development Program Project, Project Code: 20210201139GX; and in part by the National Natural Science Foundation of China Youth Fund, Project Code: 62205032.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data are contained within the article.
Conflicts of Interest
The authors declare no conflicts of interest.
References
- Zeng, F.; Gao, S.J.; San, X.G.; Zhang, X. Development Status and Trends of Airborne Laser Communication Systems. China Opt. (Chin. Engl.) 2016, 9, 65–73. [Google Scholar] [CrossRef]
- Cruz, P.J.; Fierro, R. Towards optical wireless communications between micro unmanned aerial and ground systems. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015. [Google Scholar]
- Griethe, W.; Knapek, M.; Horwathh, J. Laser links for mobile airborne nodes. In Airborne Intelligence, Surveillance, Reconnaissance (ISR) Systems and Applications XII; Spie Defense + Security: Orlando, FL, USA, 2015. [Google Scholar]
- Quintana, C.; Erry, G.; Gomez, A.; Thueux, Y.; Faulkner, G.E.; O’Brien, D.C. Design of a holographic tracking module for long-range retroreflector free-space systems. Appl. Opt. 2016, 55, 7173–7178. [Google Scholar] [CrossRef]
- Horwath, J.; Gonzalez, D.D.; Navajas, L.M.; Souto, A.L.; Semerjyan, V.; Raju, G.; Grabowsky, J.; Garcia, C.; Lai, Y.; Bähr, T.; et al. Test results of error-free bidirectional 10 Gbps link for air-to-ground optical communications. In Proceedings of the SPIE Conference on Free-Space Laser Communication and Atmospheric Propagation, San Francisco, CA, USA, 27 January–1 February 2024. [Google Scholar]
- Xu, L.; Shen, Y.; An, J.X. Development of an Airborne Laser Communication Equipment for Drones. Opt. Commun. Technol. 2018, 42, 60–62. (In Chinese) [Google Scholar]
- Ke, X.Z.; Jing, Y.K. Far-field laser spot image detection for use under atmospheric turbulence: Optical. Engineering 2020, 59, 1. [Google Scholar] [CrossRef]
- Ke, X.Z.; Wu, J.L.; Yang, S.J. Research progress and prospects of atmospheric turbulence for wireless optical communication. J. Radio Sci. 2021, 36, 17. [Google Scholar]
- Shen, Y.; Feng, Y.; Xu, L. Airborne laser transmission technology for rapid takeoff base station unmanned aerial vehicles. Opt. Commun. Technol. 2019, 43, 4. [Google Scholar]
- Antonello, R.; Branz, F.; Sansone, F.; Cenedese, A.; Francesconi, A. High Precision Dual-Stage Pointing Mechanism for Miniature Satellite Laser Communication Terminals. IEEE Trans. Ind. Electron. 2020, 68, 776–785. [Google Scholar] [CrossRef]
- Su, Z. Research on High Performance Modulation and Demodulation Technology of New Transceiver Architecture for Optical Communication System; Beijing University of Posts and Telecommunications: Beijing, China, 2023. [Google Scholar] [CrossRef]
- Li, X.M.; Zhang, L.Z.; Meng, L.X. Airborne space laser communication system and experiments. In Proceedings of the Selected Proceedings of the Photoelectronic Technology Committee Conferences held June–July 2015, Harbin, China, 14–19 June 2015. [Google Scholar]
- Yansong, S.; Shuai, C.; Shoufeng, T. Feature Analysis of Aeronautical Laser Communication System and Airborne Laser Communication Experiment. Chin. J. Lasers 2016, 43, 1206004. [Google Scholar] [CrossRef]
- Griethe, W.; Gregory, M.; Heine, F.; Kämpfner, H. High-Speed Laser Communications in UAV Scenarios. Proc. SPIE-Int. Soc. Opt. Eng. 2011, 8020, 1779–1781. [Google Scholar]
- Chen, C.; Grier, A.; Malfa, M.; Booen, E.; Harding, H.; Xia, C.; Hunwardsen, M.; Demers, J.; Kudinov, K.; Mak, G.; et al. High-Speed Optical Links for UAV Applications. In Conference on Free-Space Laser Communication and Atmospheric Propagation XXIX; SPIE: St. Bellingham, WA, USA, 2017. [Google Scholar]
- Wu, P.F.; Ke, X.Z.; Yuan, Q. Development of a 10 Mbit/s to 1Gbit/s rate-adaptive wireless optical communication machine. J. Xi’an Univ. Technol. 2014, 30, 5. [Google Scholar]
- Li, L.; Zhang, R.; Liao, P.; Cao, Y.; Song, H.; Zhao, Y.; Du, J.; Zhao, Z.; Liu, C.; Pang, K.; et al. Mitigation for turbulence effects in a 40-Gbit/s orbital-angular-momentum-multiplexed free-space optical link between a ground station and a retro-reflecting UAV using MIMO equalization. Opt. Lett. 2019, 44, 5181–5184. [Google Scholar] [CrossRef]
- Tang, Y.C.; Feng, J.; Luo, G.J. Design and Testing of Wireless Optical Communication System for Shipborne Mobile Communication. Opt. Commun. Technol. 2016, 40, 4. [Google Scholar]
- Available online: https://cust.edu.cn/lgxw/74369.htm (accessed on 2 November 2023).
- Shao, L.; Li, Y.J.; Li, X. Optimization method for a transmission rate of unmanned aerial vehicle FSO/RF hybrid relay link. Appl. Opt. 2023, 44, 1142. [Google Scholar]
- Shi, T.; Qi, Y.; Wu, B. Hybrid Free Space Optical Communication and Radio Frequency MIMO System for Photonic Interference Separation. IEEE Photonics Technol. Lett. 2022, 34, 149–152. [Google Scholar] [CrossRef]
- Ehsan, E.; Ngah, R.; Daud, N.A.B. A 1.792 Tbps RoF-based PDM-DQPSK DWDM system for high-capacity long-haul 5 G and beyond optical network. Optik 2022, 269, 169858. [Google Scholar] [CrossRef]
- Ragheb, A.M.; Tareq, Q.; Esmail, M.A.; Alrabeiah, M.R.; Alshebeili, S.A.; Khan, M.Z. Enabling WiGig Communications Using Quantum-Dash Laser Source under Smoky Weather Conditions. IEEE Photonics J. 2022, 14, 1–7. [Google Scholar] [CrossRef]
- Zhang, M.; Tong, S.F.; Teng, Y.J. Research on Composite Tracking Control Technology for Single Detector in Space Laser Communication. Laser Infrared 2020, 50, 4. [Google Scholar]
- Guo, A.Y.; Gao, W.J.; Zhou, A.S. Beacon Free Capture and Aiming Technology for Interstellar Optical Communication. Infrared Laser Eng. 2017, 46, 7. [Google Scholar]
- Gao, Y.N. Research on Beacon Free Rapid Capture Technology in Space Laser Communication Systems; Changchun University of Technology: Changchun, China, 2019. [Google Scholar]
- Mu, Y.N.; Wang, H.; Li, P. Pulse state interval modulation method and communication experiment in harsh environments. J. Commun. 2014, 35, 7. [Google Scholar]
- Lu, S.W.; Hou, X.; Li, G.T. Development Status and Trends of Space Optical Communication Technology. Integr. Inf. Netw. Heaven Earth 2022, 3, 39–46. [Google Scholar]
- Ke, X.; Deng, L. Wireless Optical Communication; Science Press: Beijing, China, 2016. [Google Scholar]
- Kolmogorov, A.N. The local structure of turbulence in an incom-pressible viscous fluid for very large Reynolds numbers. Sov. PhysicsUspekhi 1941, 30, 301–305. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).