Featured Application
Underwater 3D printing, including maintenance works.
Abstract
Additive manufacturing (AM), commonly named 3D printing, is a promising technology for many applications. It is the most viable option for widespread use in automated construction processes, especially for harsh environments such as underwater. Some contemporary applications of this technology have been tested in underwater environments, but there are still a number of problems to be solved. This study focuses on the current development of 3D printing technology for underwater applications, including the required improvements in the technology itself, as well as new materials. Information about underwater applications involving part fabrication via AM is also provided. The article is based on a literature review that is supplemented by case studies of practical applications. The main findings show that the usage of additive manufacturing in underwater applications can bring a number of advantages—for instance, increasing work safety, limiting the environmental burden, and high efficiency. Currently, only a few prototype applications for this technology have been developed. However, underwater additive manufacturing is a promising tool to develop new, effective applications on a larger scale. The technology itself, as well as the materials used, still require development and optimization.
1. Introduction
Additive manufacturing (AM), commonly named 3D printing, is a promising technology with many applications, including usage in the aerospace industry [1,2,3], biomedical applications [4,5], the construction industry [6,7], and many others [8,9,10]. One particular application is 4D-printed advanced solutions [11,12,13]. In the case of producing a physical object using 4D printing additive technology, it should be understood as a group of technical solutions where the layers of material respond to physical factors as well as other multi-materials with various properties, especially in time. As a result of manufacturing in 4D printing technology, materials often change shape, size, or pattern depending on factors such as the temperature, moisture, and stress relaxation in the material [11,12,13]. AM technology has a number of benefits, one of them being automatization and the possibility to work in harsh environments, including in space [14,15] or underwater [16].
Using AM technologies for underwater applications brings a number of advantages—for instance, increasing the safety of the work, limiting the environmental burden, and high efficiency [16,17]. The design and development of AM technologies for underwater applications require a different approach than in the case of surface technologies. In some ways, this new environment can support the process, such as with better cooling properties, but, in many cases, it brings more challenges than in 3D printing in the air [18,19]. Additionally, the design of modern filaments for effective application in a harsh water environment requires a complex approach [20]. Currently, only a few prototype applications for this technology have been developed as real elements eligible for underwater 3D printing [21,22]. Most of the ideas presented as “underwater 3D printing” are simply technologies using AM as a tool for the manufacturing of elements for further underwater application [16,23]. Sanchez-Gonzalez et al. [24] mention 3D printing technology as one of the most important for the marine industry as a whole. The authors pay attention to a small number of studies provided in this area and show this direction as one of the most prospective [24]. However, underwater AM is a promising means to develop new, effective applications on a larger scale. The technology itself, as well as the materials used, still require development and optimization.
The main focus of this study lies in the current development of 3D printing technology for underwater applications, as well as underwater applications involving part fabrication via AM. In particular, the article describes the technologies based on extrusion for concrete and the laser deposition molding of titanium powder as technologies tested in the laboratory for underwater 3D printing. Some contemporary applications for this technology have been tested in underwater environments, but there are still a number of problems to be solved. The improvements in the technology itself and new materials are discussed. The article is addressed to researchers and practitioners, to demonstrate the state of the art in the field of underwater 3D printing and to help them to obtain useful information to conduct research in this field. It also shows the most promising directions for further development in this area.
2. Research Methodology
The systematic review was performed using Scopus as the main search tool and the following databases: ScienceDirect, ACS Publications, Wiley Online Library, IEEE Xplore Digital Library, and Google Scholar. It was conducted between September and December 2023. The used keywords were “3D printing” and “underwater” combined. The research results in the Scopus database showed 1051 documents (Figure 1). They were checked, and the most relevant publications were selected for this review.
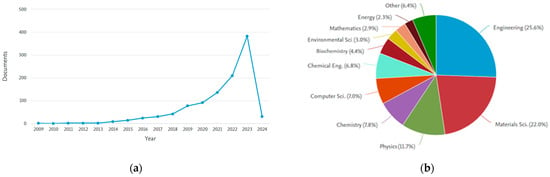
Figure 1.
Search results in the Scopus database: (a) published documents by year; (b) published documents by subject area [25].
The analysis of the literature showed that the topic was very new. The first publication was in 2009, and, prior to 2015, there were fewer than 10 publications per year in this area. Rapid growth began in 2019. This shows that this research area is quite innovative and it has been intensively developed in the last few years (Figure 1a). This topic has a clear multidisciplinary nature, which can be observed based on document statistics about the subjects. The first two places are occupied by engineering and material science, but there is a large variety of other covered subjects (Figure 1b). According to the type of document, the most represented are original articles—more than 66% of all publications. Review articles represent 15.5% and conference papers 14.2%. The other types are books, book chapters, notes, short surveys, etc. This is a quite typical proportion for a relatively new research area. It is also worth noting that the majority of publications were produced by teams from China, with 449 publications, and the USA, with 226 publications. There is quite a large difference between the two first countries and the rest of the list: in third place is the UK, with only 64 publications. The dominant position is occupied by countries considered to be leading in the case of innovative technologies.
3. Materials
Different groups of materials have been tested for underwater applications. The most widely used at present are polymers, as in the case of traditional 3D printing in the air.
3.1. Ceramics, Concrete, Geopolymers, and Similar
The most intensive research was carried out on the 3D printing of concrete materials for underwater application in the area of infrastructure, as well as coral reef recultivation [18,26]. Moreover, 3D printing technology was developed only for concrete in situ. AM technology supports the direct manufacturing of concrete structures underwater, offering a more convenient and efficient way to build [21,26,27]. However, while this technology seems to be very promising, the investigation of materials printed in situ underwater shows some challenges—see Table 1.

Table 1.
Investigations of cementitious materials for application in underwater AM.
Additionally, it is worth noting that the buildability in the case of 3D printing technology is a critical aspect. It requires special attention because the buoyancy of water reduces the material’s deformation and density and influences the interlayer bonding [26,32]. Moreover, the factor of printability seems to be crucial, due to interlayer adhesion [26,29]. The research also shows that the behavior of the samples in time is different for 3D printing in the air and underwater. In the air, the interlayer adhesion of 3D-printed samples is correlated with the speed of printing. In the case of samples 3D-printed underwater, the interlayer adhesion first decreases and then increases with the speed limitation [26,29].
The results confirm that obtaining elements of satisfactory quality requires more effort for 3D-printed elements [18,19,29]. During 3D printing underwater, more defects and discontinuities occur compared with specimens 3D-printed in the air. Additionally, when the same material is used, the samples 3D-printed underwater have worse mechanical properties than those 3D-printed in the air, especially compressive strength [29]. To reduce the above phenomenon, it is possible to modify the concrete mixture, especially through the reduction of the water/cement (W/C) ratio and the selection of proper admixtures, including superplasticizers and anti-washout components—for example, cellulose and Welan gum [26].
It is also worth mentioning that slightly different behavior is observed in the underwater investigation of concrete mixtures produced in freshwater and seawater. These investigations are focused on the washout resistance [33]. The results confirm the good mixture efficiency in terms of washout resistance in both freshwater and seawater. However, seawater shows higher resistance to washout than freshwater [33]. No information on such tests for 3D-printed materials is available in the literature.
Moreover, some comparative works have been provided on the topic of underwater applications of geopolymers and cement concrete for 3D-printed artificial reefs [27,34]. Besides the two most popular materials, others have been tested for the 3D printing of artificial reefs—for example, calcium carbonate, plasters, sandstone powder, ceramic clay, terracotta, and diatomite sand with magnesium oxide—by other research groups [16,35].
The possibility of the usage of in situ resources such as seawater and marine sediments for AM technology was investigated by Li et al. [31]. The provided research confirms the possibility of obtaining mortar/cement by using coral sand and seawater with some additives. The properties of the prepared mixtures, especially those reinforced by glass or basalt fibers, were acceptable for the design of cement-based materials for construction in remote islands and coastal areas [31]. Currently, trials in this area have been conducted only in air. It is worth considering the implementation of this approach for underwater 3D printing, especially for significant depths, where the usage of in situ materials will be particularly valuable.
3.2. Polymers
Organic polymers represent the group that is most often used for 3D printing purposes [1]. A similar situation is seen in underwater applications, where polymers represent a wider and more diverse group. However, while there are a number of 3D-printed polymer products for underwater applications, the actual underwater printing technology was developed recently [36]. Moreover, except for some manuals on popular websites, no information on scientific research in this area is available in the literature.
Among the polymers used for underwater applications, it is worth mentioning polyurethane (PU) [37], acrylonitrile butadiene styrene (ABS) [23,38,39,40], polylactic acid (PLA) [38,41,42], high-density polyethylene (HDPE) [43], polyethylene terephthalate glycol (PET-G) [41,44], polycarbonate (PC) [44], and different bioplastics used for artificial reefs [35]. Most of these materials are thermoplastic polymers. Less frequently, for underwater applications, thermosets such as EPX82 resin [45] or special resins such as photosensitive resins are used, with the excellent dispersion properties of Cu2O antifouling agents [46]. Moreover, this group of materials is very often modified by other components, including glass micro-balloons (GMB) [43], or by the foaming process [43,47], or they are protected by using coatings with special hydrophobic or hydrophilic properties [48].
During the usage of polymer materials in underwater applications, some interesting results have been provided. One of them was delivered by Ryley et al. [20]. The team investigated biofouling on common 3D printing polymers: polycaprolactone (PCL), printed using fused deposition modeling (FDM), and two commercial polymer materials: VisiJet® SL Clear, printed by stereolithography, and VeroClear™, printed by PolyJet [20]. The 3D-printed samples were also compared with two materials manufactured by traditional methods: polydimethylsiloxane (PDMS) and glass [20]. The obtained results showed the best antifouling properties for PCL and the worst for glass. In general, 3D printing polymers have less microalgae and more encrusting bryozoans than reference materials [20]. This research confirms the potential of PCL as a material for marine applications [20].
3.3. Metals
Only a few metals have been investigated for application in underwater 3D printing [22,49]. The most advanced work was performed with titanium alloy Ti-6Al-4V for the site repair of marine equipment in underwater environments, using laser metal deposition (LMD) [49]. For this purpose, the researchers used a specially designed drainage nozzle, which ensured a local dry chamber for this process [49]. The obtained results show that this technology can be useful for the fabrication and repair of tailored components or parts with complex shapes in underwater environments [49]. The same material and LMD technology were also used by Fu et al. [22] for the production of thin-walled Ti-6Al-4V alloy parts to check the possibility of repairing underwater structures [22]. In the case of this technology, the backflow of water was prevented by the improper nozzle construction and the shielding gas flow, creating a stable local dry cavity for printing [22].
The titanium powder—the Ti-6Al-4V alloy—was also used for the 3D printing of hemispheres dedicated to underwater vehicles [50]. The elements were produced using an electron beam melting (EBM) system [50].
A less popular metal used for underwater purposes is stainless steel. It finds application in AM technology for the parts of underwater robots and in propellers for an outrunner motor composed of 316L steel [51]. Stainless steel is also used as a simple and fouling-mitigating membrane, created using 3D printing technology for underwater applications [52]. This material was also applied for the manufacturing of miniature marine structures for crashworthiness verification [53].
For underwater applications, aluminum was also tested as a material for powder-based 3D printing. This material was tested for an underwater acoustic transducer [54]. The usage of 3D printing technology allows the production of elements with complicated shapes that are not possible with traditional methods. It positively influences the efficiency and size of the device [54].
3.4. Biomaterials and Others
However, bioprinting is not typically developed for underwater applications as the environment is very often associated with wet conditions. One of the most important areas for this research is enhanced adhesion in wet conditions for different materials. This type of test was performed i.a. for a photo-crosslinkable bio-ink containing a mixture of gelatin methacryloyl (GelMA), methacrylated hyaluronic acid (HAMA), and mesenchymal stem cells (MSCs) [55]. This material shows sufficient adhesion on diverse substrates, including biological tissues, and also in different aqueous environments [55]. It also offers the possibility of using similar mixtures for underwater bioprinting.
In addition, hydrogels have been tested for the possibility of underwater adhesion because they are suitable for this environment [56,57], including in parts for soft robots, such as suckers [58]. An important advantage of their application for biomedical purposes is their good underwater adhesion, but this can be decreased by the material’s swelling and the formation of a water molecular layer on the surface of the hydrogel [56]. In this area, some eutectogels have also been tested as a potential material for underwater electrodes [59].
Other materials of this group are used rarely for 3D printing applications. Non-typical, successful trials were performed for a gradient-index phononic crystal lens based on the hyperbolic secant index profile, applied as an acoustic material for underwater applications, including ultrasound [60].
In the literature, there is only a small number of studies on the possibilities for the 3D printing of multi-material compositions in one process, as well as a limited number of investigations on the application of composites in AM for underwater applications [61].
4. Technologies
The technologies are classified, according to the type of material used, into three main categories [62]: solid-, powder-, and liquid-based.
4.1. 3D Printing Technologies
4.1.1. Technologies Based on Solid Filaments
This group is the most widely used technique for 3D printing. Among the particular technologies in this category are fused deposition modeling (FDM), laminated object manufacturing (LOM), and wire and arc additive manufacturing (WAAM). In the case of underwater applications, some investigations have been performed with FDM technology. They prove the possibility of its use underwater for polymer printing [36]. However, these trials have no scientific nature; they only show the potential of this solution for further research. FDM and other technologies based on paste extrusion have also been investigated for artificial reef manufacturing and the creation of marine infrastructure in situ [35].
Another trial was performed on the development of systems for cementitious materials. This technology was primarily connected with a robot arm to print concrete materials underwater, layer by layer. This makes it possible to transform design drawings directly into real infrastructure elements [21,26,27]. Currently, the devices dedicated to the underwater research of cementitious materials are most often located in the air and only a nozzle works underwater (Figure 2).
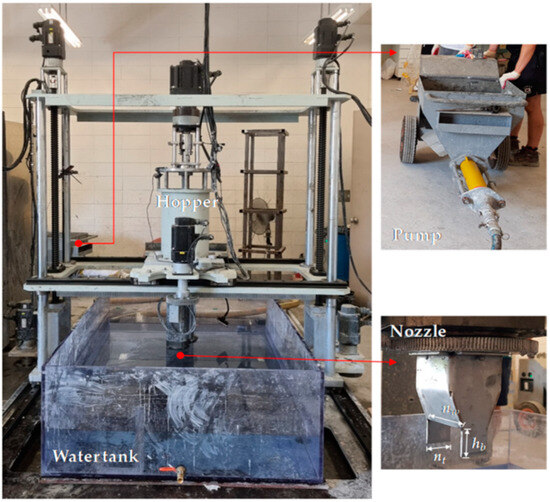
Figure 2.
The technical solution used during testing of underwater 3D printing for materials in the laboratory. Source: [29].
This technical solution applied to the device means that the main works connected with improved 3D printing for underwater applications focus on nozzle construction [30]. The presented solution (Figure 2) is built upon conventional technology for the 3D printing of concrete materials, which is based on paste extrusion by a nozzle. In the first step, suitable ingredients are premixed and then pumped through the hose to the hopper. From the hopper, the material is delivered to the nozzle, which is located in an underwater environment (water tank). After leaving the nozzle, the material comes into direct contact with the aqueous environment, where the layers are joined to obtain the appropriate shape of the printed element. The material is cured in the water [29].
4.1.2. Technologies Based on Powders
The second important group of AM technologies comprises solutions based on powder deposition; among them are [22,49] laser metal deposition (LDM), selective laser sintering (SLS), selective laser melting (SLM), and electron beam melting (EBM).
This type of technology is usually applied for more demanding applications using metal powders [49]. The general idea of this system is to protect the last part of the process against the presence of water and to place it into a special chamber with air (Figure 3). This solution previously was used in the underwater welding process and has a strong basis in this area.
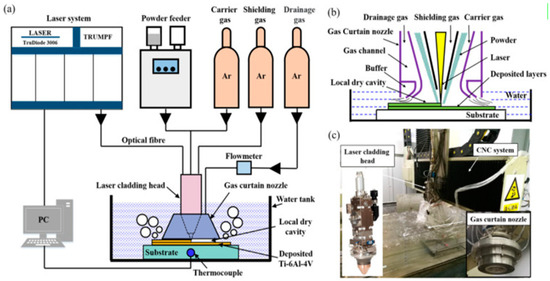
Figure 3.
The test setup. (a) Schematic diagram of the underwater printing system; (b) diagram of the underwater laser–material interaction process; (c) the actual manufacturing process of underwater LMD. Source: [49].
Moreover, powder-based technologies such as binder jetting have been investigated for the creation of other elements that require high precision or have complicated shapes—for example, artificial reefs [35]. In this case, the construction was printed in the air and then submerged.
4.1.3. Technologies Based on Liquid Filaments
The other group of technologies, based on liquids, includes vat photopolymerization–stereolithography (SLA), material jetting (MJ), digital light processing (DLP), and others. As a printing material, this technology typically uses a liquid resin that is hardened under different actors—for example, UV light [16]. This group has not been yet tested for the technology of printing in situ in the underwater environment. Nevertheless, it has been used for the manufacturing of some elements for underwater applications, such as housing for monitoring elements that work underwater [45,63], membranes for water treatment systems [64], or other advanced solutions such as an underwater magnetic nanofluid droplet-based generator (designed to convert the mechanical energy of sliding droplets in to electricity), which was inspired by shark skin [65].
In this area, an interesting experiment was performed by Phillips et al. [63], who confirmed the possibility of using SLA technology aboard a moving vessel at sea [63]. Thanks to the application of passive stabilization to support SLA printing, it was possible to manufacture high-resolution models that were fully solid and impervious to water elements for underwater applications, including sealed housings [63]. This type of approach can be beneficial in supporting marine engineering development, especially shipboard maintenance, and other applications that require the fast repair of non-typical elements for marine applications, including underwater ones [63].
4.2. Remotely Operated Vehicles (ROVs) and Autonomous Underwater Vehicles (AUVs)
The 3D printing technology is quite popular for the manufacturing of specific parts for remotely operated underwater vehicles (ROVs) or autonomous underwater vehicles (AUVs) [16,40]. This technology is useful in the case of investigations of these vehicles, including their technical improvement in different fields. It also helps to obtain a high level of flexibility in their design and gives the possibility of adding individual solutions while ensuring a reasonable cost and speed of execution [66,67].
The area of usage of these vehicles is expanding each year. Currently, they are applied in biological research [68,69], rescue activities [68], technical education [67,70], fishery inspections [71], exploration [72], and many others. These devices are also very often inspired by biological solutions, such as fish motion, to increase their efficiency [68,73]. ROV and AUV systems are particularly used in hard-to-reach places, including those located at considerable depths [74]. These vehicles can perform most of the needed tasks autonomously.
However, technologies such as ROVs and AUVs seem to be naturally suitable for underwater 3D-printed applications, especially for maintenance work at significant depths. Nonetheless, today, there is no information in the literature about such usage of these vehicles. It seems to be a promising area of further research and exploitation for this technology, especially taking into consideration that their air equivalents—drones—are widely applied in the construction industry [75].
5. Areas of Application
Each year, underwater 3D printing becomes more popular, including the usage of AM for the printing of elements for underwater applications, as well as trials for in situ printing in underwater environments. In Table 2, we present the most important areas of exploitation of this technology. It is worth noticing that, among them, only two areas—the repair of marine structures and 3D-printed marine structures—have been investigated regarding the usage of partly submerged 3D printers (nozzle area).
Table 2.
Selected applications for underwater AM.
5.1. Infrastructure
The building, maintenance, and repair of underwater and offshore infrastructure seems to be one of the most important areas in the usage of underwater 3D printing. This technology can provide a reliable solution in many areas, including underwater pipeline repair, offshore wind power foundations, submarine tunnels, artificial islands, and other activities connected with ocean engineering [26,28]. This technology also aids in modeling some marine infrastructure’s behavior and its investigation under different conditions [81]. It also is a promising solution for coastal and nearshore construction infrastructure, where it overcomes the limitations connected with traditional building technologies [7]. However, further solutions still require research work, including the development of new materials with unique properties, suitable concrete pumping equipment, and proper construction parameters [26].
In some cases, polymer parts are also used as a form of infrastructure; for example, a printed ABS material was developed as a floating antenna for coastal ocean monitoring [39]. Moreover, stainless steel was applied as a material for the 3D printing of models of marine infrastructure for crashworthiness verification [53].
In the case of infrastructure building, some futuristic ideas have also been considered, such as using AM as an unconventional technology for offshore oil production on the Arctic shelf [82]. The authors consider the potential cost of subsea drilling units and all construction technology necessary for exploration and estimate it to be between 127 and 137 billion US dollars, in the case of using 3D printing as an alternative to traditional technology [82].
5.2. Artificial Reefs
Artificial coral reefs aid in restoration and reformation strategies that support coral ecosystems. The use of 3D printing techniques, in this case, helps in supporting structural complexity and biodiversity through better-fixing structures for the needs of local flora and fauna [21,27]. The usage of AM supports provides additional space for organisms to settle and grow. It increases the local biodiversity and stimulates the recovery of ecosystems [27,83,84]. AM technology improves the efficiency of the recultivation process in comparison with traditional artificial reefs (concrete molds with simple geometric shapes) [85].
Despite the abundance of different materials suitable for use for artificial reef creation, there is only a small number of investigations into how the physical and chemical properties of different materials influence particular species [86]. Some works in this area were provided by Leonard et al. [86]. They investigated the coral recruitment success and early benthic community development depending on the used materials, such as 3D-printed concrete, polyvinyl chloride (PVC) with and without a chitosan coating, a fiberglass polymer, flax-based polylactic acid, and Portland concrete [86]. The results suggest that different materials should be selected according to the recultivation purposes. Meanwhile, porous concrete was characterized by the high abundance of non-coralline encrusting red algae, and the PVC with a chitosan layer supported coral recruitment [86].
Ly et al. [27] investigated different cementitious materials, such as geopolymers and cement concrete, taking into consideration biofouling (the colonization of a structure by biological organisms) and the durability of these materials in seawater [27]. The results showed that cement seems to be a better material for artificial reef construction in the 3D printing method, because of its better mechanical properties and lesser biofouling in the medium term [27]. Contrasting results were obtained by Yoris-Nobile et al. [34]. They showed, after three months of underwater tests, that geopolymers had better biological receptivity compared to cement [34].
There is a relatively large amount of investigation into the use of 3D printing for reef restoration [35]. However, there is no information in the literature about possible restoration in situ, as well as works connected with so-called mezzo reefs (the deepest reef formations).
5.3. Membranes
One of the most promising areas of application for AM technology is in the different types of membranes used for water treatment purposes [77,87]. In this case, AM technology helped to obtain a lattice structure for membrane elements. It was combined with the hydrothermal method and liquid phase deposition (LPD) to obtain multi-functional and multi-material structures for oil–water separation and wastewater treatment [87]. In particular, such materials as TiO2 and Cu2O were used to achieve suitable efficiency in organic pollutant removal [87].
The main goal of most of the membranes created with the use of AM technology is water purification, especially removing organic dyes, acids, and alkalis, as well as metal ions [88]. The 3D printing technology in this case allows the creation of more efficient and cheaper systems—for example, those that are used in solar water evaporation [88]. It is also worth noting that this type of membrane could have wider application also in desalination systems [78] and as an element for gas–water separation [89].
Among the many materials dedicated to effective 3D-printed solutions for water treatment [90,91,92,93], a work that is particularly interesting, from a material point of view, is that of Chen et al. [94]. In this case, a 3D printing ceramic material–alumina was combined with in-situ-grown aluminum borate whiskers [94]. This advanced technological solution allowed them to obtain high-efficiency separation, a high flow rate, increased durability in cycling tests, and resistance to harsh environments. Moreover, the obtained solution was easy to regenerate through high-temperature heat treatment [94].
Another interesting possibility is the automatization of water treatment, especially for the specific needs of the identification and deactivation of pollutants that are present underwater. For this purpose, You et al. [95] developed a specific approach by using small robots with green-fuel-driven thumb-sized motors produced using 3D printing methods, for the identification of underwater pollutants and elimination of contamination [95]. This type of solution has the potential to enable in situ underwater remediation [95].
5.4. Parts for Underwater Vehicles
One of the most promising areas is in parts for underwater activities, including scientific research that requires some specific, individual solutions, such as housing [38] or grips. These elements are usually produced by traditional FDM technology in the air and used for different underwater applications. As a material for their production, the most popular types of polymers are used, including PLA and ABS [38]. It is also worth noting that this was one of the first applications of 3D printing for underwater purposes [23]. Other items produced using 3D printing technology and used as parts for underwater vehicles are [16,96] propellers for high-drag vehicles, wings and tails for low-drag AUVs, legs and frames for multi-rotors, other motor transmission parts, robotic underwater gliders, robotic hands for underwater manipulation, components for a modular propulsion system, and other components.
Other popular 3D-printed solutions that are useful for underwater vehicles are different types of grips and other sampling systems. Among them is a system for discrete water sample collection, constructed thanks to AM technology in a compact form, which is useful also in extreme underwater environments [97], as well as special grips for the collection of soft deep-sea organisms at depths above 2000 m [74]. This system makes some biological research possible thanks to the implementation of a new solution, which is necessary in a narrow area of specialization [98].
Another approach was applied in the case of the creation of an underwater superlimb [99]. In this prototype, 3D printing technology was also applied; however, the main purpose of this work was to create a wearable robot that provides divers with mobility assistance and gives the additional possibility of manipulating tools in the underwater environment [99].
As an element for more advanced application in the area of deep-sea exploration, 3D-printed syntactic foams were also investigated [43]. The main aim of this application was to design better materials for improved buoyancy in underwater vehicles [43]. The results show that functionally graded foams based on the GMB/HDPE combination are a good material for this application [43].
Moreover, the usage of 3D printing technology for the manufacturing of pressure housings was investigated. These can be an element for underwater vehicles [50]. In this case, more durable materials have to be used, such as titanium alloys, which also require other technology. In this case, titanium hemispheres were created using LMD technology and tested for their resistance to external pressure [50]. The main advantage of using 3D printing technology for this purpose was the possibility of obtaining complex-shaped elements and enhancing the freedom of design—for example, the optimal geometry of penetration holes in the housing to support proper buoyancy in an underwater vehicle [50]. AM technology also provides an opportunity to obtain functionally graded materials (changing the composition and properties of the materials over the volume) [50]. These works demonstrate the feasibility of building pressure housings in AM [50].
Another less demanding housing system was manufactured using digital light synthesis (DLS) technology with EPX82 resin [45]. This type of housing is dedicated to complex coral reef monitoring and thus will be stacked with electronics. It can be used as a supporting system for vehicles or as a monitoring system placed on a reef for a certain period of time [45].
The 3D printing technology, in the context of creating underwater small vehicles such as drones, can be also used for modern fiber battery production [100]. The advantages of this solution are the light weight and structural power. The form of fiber allows also for the multi-functionality and multi-dimensionality of this solution, including the possibility of obtaining the battery in different shapes, such as fiber, fabric, and 3D object electronic systems [100].
AM is also used for the development of small underwater robots for different purposes. Some research in this area has been conducted by He et al. [101], who designed the mother–son robot system [101]. This system is combined with an amphibious spherical robot as the mother and some micro-robots as sons, produced via the 3D printing method [101]. The whole system is dedicated to different underwater tasks.
5.5. Sensors
Important applications for underwater purposes are different types of sensors, including whole systems such as fish tracking tags (optimizing a surface) [16]. In this area, the use of 3D printing technology helps in manufacturing more precise devices that better fit specific needs, particularly in the case of scientific activities [102]. An example in this area is the work by Zhang et al. [79], who designed a new bio-inspired sensor based on the lateral-line system of fish [79]. It was produced using 3D printing technology as a prototype solution. The main purpose of this sensor was to detect underwater flow disturbances [79]. The research confirmed the usefulness of this solution in underwater environments [79].
Another group of sensors for underwater applications was inspired by phocid seal whiskers [103,104]. Their main task was to sense an upstream wake. The results confirm the ability of whisker-inspired sensors to detect a high signal-to-noise ratio, indicating its efficiency in long-distance contexts [103]. This makes this invention potentially useful for application in underwater robots, especially in areas of poor visibility [103]. A similar design was presented by Gul et al. [105]. It was based on the pinniped group: they designed their sensors in the form of whiskers to detect and track the vortices inside the water [105]. The whiskers were fully 3D-printed and produced using a PU core and graphene cover in the form of different patterns. The results proved the applicability of this solution for underwater soft robots [105].
Moreover, not only single sensors are produced by 3D printing technology, but also whole systems—for example, non-invasive electroencephalography (EEG) sensors for zebrafish monitoring for the investigation of some diseases [106,107]. Thanks to AM, the material cost and fabrication time could be reduced significantly in comparison to the traditional method of manufacturing [106,107]. Another example in this area is the design of an underwater 3D scanner and its manufacturing with this technology [108].
5.6. Biological Research
The devices connected with biological research are probably the most diverse group according to the level of complexity. They include very simple devices for eco-monitoring, such as a 3D-printable instrument designed to measure the Secchi depth and water color [109], and also complicated systems of replicas of living organisms for hydrodynamic tests—for example, benthonic organisms and shark skin membranes for the analysis of marine animals’ behavior [110]. This group also includes different biomechanic robots that mimic efficient natural swimmers (e.g., boxfish, seahorse, snailfish) [16]. Another area of inspiration is the locomotion of cephalopods and jellyfish. This type of motion is the inspiration for some underwater vehicles [23,111,112,113]. For the design of this type of vehicle, 3D printing technology is necessary, because it requires non-typical elements [23,111]. The same applies for other bio-inspired soft robots [114,115,116].
An important element of soft robots is also the source of energy. It should be waterproof and sustainable in the long term [117]. As a solution to this problem, AM can be useful. Zou et al. [117] have researched this topic [117]. They developed a bionic, stretchable nanogenerator for underwater energy harvesting that was based on marine fauna, namely an electric eel [117]. They confirmed that the designed solution has the potential to be an effective power source for soft underwater robots as well as wearable electronics used underwater [117].
In the area of soft robots, research was also provided by Soomro et al. [76]. As a source of inspiration, they used the morphology of Anura, such as Rana esculenta (a semi-aquatic frog) [76]. As a result of this work, a prototype solution, using AM technology, of a bio-inspired frog robot was created. Its capability for underwater synchronous swimming was confirmed. This robot is dedicated to underwater environmental monitoring [76].
This type of activity can be useful not only for the research of modern animal species but also in understanding evolution. Peterman and Ritterbush [118] used 3D printing technology for the simulation of the motion of ancient sea animals (externally shelled cephalopods—Baculites compressus) to investigate their functional morphology and ecology over geological timescales [118]. This research is particularly interesting, because this type of animal has no modern analogs that allow for a comparison of the possible means of moving [118]. The use of 3D-printed models allows us to verify possible means of movement of this organism and select the most probable theories about their life habits. The provided experiments give some first-order constraints in this area [118].
In addition, plants can be a source of inspiration for the use of 3D printing for underwater purposes. Xiang et al. [119] designed a new hydrophobic material based on the structure of the leaf Salvinia [119]. The biomimetic artificial surface successfully imitated the super-repellent capability of the leaves and also fully retrieved air mattresses created by nature [119]. The results of this work allow us to better understand the mechanisms of the water-repellent property and, on this basis, design materials for underwater applications [119].
Another solution that is potentially useful in biological research, supported by 3D printing technology, is untethered stimuli-responsive soft materials with programmed sequential self-folding [120]. This type of solution, composed of hydrogels and elastic polymers, displays reversible self-folding properties without changing the chemical composition or structural dimensions, which makes its application possible many times [120]. The designed solutions can capture, hold, and fasten objects in the underwater environment, which can be useful in many areas for the investigation of small objects [120].
5.7. Other Applications
Another application for biomimetic structures is artificial muscles, with potential application in walker vehicles, exoskeletons, prosthetics, and stealthy undersea propulsion [80]. In particular, Colltelli et al. [80] show the two main areas for the underwater application of this 3D-printed invention [80]. The first is connected with the biomimetic method of propulsion for ROVs and AUVs (based on squid and octopi’s reactive propulsion). The second is the possibility of using artificial muscles for the simulation of the motion of pelagic fish (the slow motion of a large back fin), which also can be used in the construction of ROVs and AUVs to achieve stealthy propulsion [80].
In the area of bio-inspired inventions useful for underwater technology, it is also worth mentioning adhesive discs produced by 3D printing technology [121]. The inspiration for this work was the fish Guizhou Gastromyzontidae, which has developed a strong adhesive system for wet and slippery rocks [121]. A copy of this solution is potentially useful in underwater robotics [121]. Similar solutions were introduced by Zhou and Wu [122] based on different species, such as Hillstream loaches (Beaufortia kweichowensis) [122]. Moreover, the usage of 3D printing in underwater acoustic areas was described, such as curved piezoelectric single-crystal composite transducers [123] or other devices designed using metamaterials for underwater sound control [115,124].
Another area of application for 3D-printed elements is underwater sound absorption. This can be achieved with the usage of different types of thermoplastic polyurethanes [37]. The obtained results confirm the good sound absorption performance of the designed materials under normal pressure as well as under hydrostatic pressure changes [37].
6. Challenges, Limitations, and Predicted Directions of Development
While AM is developing very rapidly, there are still a number of limitations and challenges connected with 3D printing underwater. Among the main areas that require further research, the most important seems to be the development of machines for totally submerged objects and material issues. The experiment must be conducted in a difficult underwater environment, which creates challenges for their proper design and the appropriate construction of supporting tools. This requires new solutions in the area of construction. Moreover, the usage of the materials creates some limitations, especially in a real environment, where the external conditions can change. Some of the material problems have been recognized and partly solved by using admixtures—for example, for concrete—but other materials, such as metal powders, still need to be isolated from an underwater environment to obtain the desired effect [49].
In the literature, there are only a few works that mention the further development of 3D printing. This is usually in the general context of the whole marine industry. Most of them confirm that 3D printing technology is one of the most important for the marine industry as a whole [24,125], but they do not specify the particular application or only mention it briefly. The applications mentioned as being connected with future trends are AM for the production of custom or small-batch components for both yachts and sailboats [125] and 3D-printed spare parts, tools, and accessories in the marine industry [126].
The presented areas of application illustrate these trends well. They show the great potential of AM for underwater applications. However, there are visible gaps in this area that require further research, and the main motivation for development is often the low cost and accessibility of solutions [127]. The analysis shows that AM is also a technology that has the potential to contribute to the invention of the most advanced and complex solutions. Examples in this area are 4D printing technology and smart devices for underwater applications [13].
The other, not previously mentioned visible trend in the research is the increasing concerns about the environment and trials to quantify these data. The first research made use of some tools, such as life cycle analysis, providing an example of work connected with the life cycle estimation of an underwater drone hull to study the Arctic [128]. Other analyses are connected with the environmental footprint, including estimations of the possible reduction of CO2 emissions or its capture by using proper materials for artificial reef structures [129].
7. Conclusions
The main findings show that the usage of AM in underwater applications can bring a number of advantages—for instance, increasing the safety of the work, limiting the environmental burden, and high efficiency. Currently, polymers are the most important materials used in underwater applications; however, other groups of materials are also being intensively developed. Despite the widespread interest in this technology’s application in the marine industry, thus far, only a few prototype products have been developed. Only two technologies find real underwater application (titanium alloys and concrete) for scientific purposes. However, some tests also show the possibility of the 3D printing of polymer materials in this environment.
Moreover, underwater AM is a promising tool to develop new, effective applications on a larger scale; nonetheless, the technology itself, as well as the materials used, still require development and optimization. This article identifies the following areas as the most promising for future development:
- The development of knowledge about the used materials—for example, there are no washout tests for 3D-printed materials described in the literature;
- The improvement of 3D printing technologies in situ according to the efficiency and quality of the obtained products;
- The development of underwater 3D printing in situ and the application of the technology, especially for deep-sea works, including the maintenance of infrastructure or possible restoration in situ of so-called mezzo reefs (the deepest reef formations);
- The design and modification of AM technologies for the 3D printing of multi-material compositions in one process for underwater applications;
- The employment of technologies such as ROVs and AUVs for underwater 3D printing applications, including process automatization;
- The development of 3D printing for advanced solutions, including 4D printing utilized for the fabrication of smart devices for underwater applications;
- The enhancement of data-based environmental analysis to confirm the real burden of this technology.
Author Contributions
Conceptualization, K.K., S.G. and T.G.; methodology, K.K.; validation, P.D., D.H.T. and S.P.; formal analysis, S.P. and M.R.; investigation, K.K., S.G. and S.P.; writing—original draft preparation, K.K. and S.G.; writing—review and editing, P.D., D.H.T. and M.R.; supervision, K.K. and T.G.; project administration, K.K. and T.G. All authors have read and agreed to the published version of the manuscript.
Funding
This work was financed by the Polish National Agency for Academic Exchange in the framework of joint research projects between the Republic of Poland and the Federal Republic of Germany under the grant “Underwater eco-monitoring” (PPN/BDE/2021/1/00003/U/00001). And was supported by the Polish National Agency for Academic Exchange under the Exchange program for students and scientists as part of a bilateral cooperation offer for incoming students and scientists, grant no. BPN/BIL/2021/1/00159/U/00001.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflicts of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
References
- Rajendran, S.; Palani, G.; Kanakaraj, A.; Shanmugam, V.; Veerasimman, A.; Gądek, S.; Korniejenko, K.; Marimuthu, U. Metal and Polymer Based Composites Manufactured Using Additive Manufacturing—A Brief Review. Polymers 2023, 15, 2564. [Google Scholar] [CrossRef]
- Marczyk, J.; Ostrowska, K.; Hebda, M. Influence of Binder Jet 3D Printing Process Parameters from Irregular Feedstock Powder on Final Properties of Al Parts. Adv. Powder Technol. 2022, 33, 103768. [Google Scholar] [CrossRef]
- Tang, H.P.; Qian, M.; Liu, N.; Zhang, X.Z.; Yang, G.Y.; Wang, J. Effect of Powder Reuse Times on Additive Manufacturing of Ti-6Al-4V by Selective Electron Beam Melting. JOM 2015, 67, 555–563. [Google Scholar] [CrossRef]
- Liber-Kneć, A.; Łagan, S.; Chojnacka-Brożek, A.; Gądek, S. Characterization of 3D Printed PLA Scaffolds Through Experimental and Modeling Approaches. In Innovations in Biomedical Engineering; Springer International Publishing: Cham, Switzerland, 2021; pp. 289–297. [Google Scholar]
- Shabbak, A.; Masoumkhani, F.; Fallah, A.; Amani-Beni, R.; Mohammadpour, H.; Shahbazi, T.; Bakhshi, A. 3D Printing for Cardiovascular Surgery and Intervention: A Review Article. Curr. Probl. Cardiol. 2024, 49, 102086. [Google Scholar] [CrossRef] [PubMed]
- Ziejewska, C.; Marczyk, J.; Korniejenko, K.; Bednarz, S.; Sroczyk, P.; Łach, M.; Mikuła, J.; Figiela, B.; Szechyńska-Hebda, M.; Hebda, M. 3D Printing of Concrete-Geopolymer Hybrids. Materials 2022, 15, 2819. [Google Scholar] [CrossRef] [PubMed]
- Mierzwiński, D.; Łach, M.; Gądek, S.; Lin, W.T.; Tran, D.H.; Korniejenko, K. A Brief overview of the use of additive manufacturing of concreate materials in construction. Acta Innov. 2023, 2023, 22–37. [Google Scholar] [CrossRef]
- Jiang, X.; Liang, Z.; Wu, M.; Lu, J.; Shi, C.; Wang, Q.; Wang, Z.; Jin, Z.; Jiang, L.; Huang, L.; et al. High-Performance Organic Electrochemical Transistors Gated with 3D-Printed Graphene Oxide Electrodes. Nano Res. 2023, 16, 12689–12696. [Google Scholar] [CrossRef]
- Monfared, V.; Ramakrishna, S.; Nasajpour-Esfahani, N.; Toghraie, D.; Hekmatifar, M.; Rahmati, S. Science and Technology of Additive Manufacturing Progress: Processes, Materials, and Applications. Met. Mater. Int. 2023, 29, 3442–3470. [Google Scholar] [CrossRef] [PubMed]
- Soleimanzadeh, H.; Rolfe, B.; Bodaghi, M.; Jamalabadi, M.; Zhang, X.; Zolfagharian, A. Sustainable Robots 4D Printing. Adv. Sustain. Syst. 2023, 7, 2300289. [Google Scholar] [CrossRef]
- Mallakpour, S.; Tabesh, F.; Hussain, C.M. 3D and 4D Printing: From Innovation to Evolution. Adv. Colloid Interface Sci. 2021, 294, 102482. [Google Scholar] [CrossRef]
- Ding, H.; Zhang, X.; Liu, Y.; Ramakrishna, S. Review of Mechanisms and Deformation Behaviors in 4D Printing. Int. J. Adv. Manuf. Technol. 2019, 105, 4633–4649. [Google Scholar] [CrossRef]
- Khalid, M.Y.; Arif, Z.U.; Ahmed, W.; Umer, R.; Zolfagharian, A.; Bodaghi, M. 4D Printing: Technological Developments in Robotics Applications. Sens. Actuators A Phys. 2022, 343, 113670. [Google Scholar] [CrossRef]
- Korniejenko, K.; Pławecka, K.; Kozub, B. An Overview for Modern Energy-Efficient Solutions for Lunar and Martian Habitats Made Based on Geopolymers Composites and 3D Printing Technology. Energies 2022, 15, 9322. [Google Scholar] [CrossRef]
- Pant, M.; Pidge, P.; Nagdeve, L.; Kumar, H. A Review of Additive Manufacturing in Aerospace Application. Rev. Compos. Mater. Av. 2021, 31, 109–115. [Google Scholar] [CrossRef]
- Mohammed, J.S. Applications of 3D Printing Technologies in Oceanography. Methods Oceanogr. 2016, 17, 97–117. [Google Scholar] [CrossRef]
- Zolfagharian, A.; Kaynak, A.; Kouzani, A. Closed-Loop 4D-Printed Soft Robots. Mater. Des. 2020, 188, 108411. [Google Scholar] [CrossRef]
- Wang, Y.; Qiu, L.C.; Hu, Y.Y.; Chen, S.G.; Liu, Y. Influential Factors on Mechanical Properties and Microscopic Characteristics of Underwater 3D Printing Concrete. J. Build. Eng. 2023, 77, 107571. [Google Scholar] [CrossRef]
- Seo, E.A.; Kim, W.W.; Kim, S.W.; Kwon, H.K.; Lee, H.J. Mechanical Properties of 3D Printed Concrete with Coarse Aggregates and Polypropylene Fiber in the Air and Underwater Environment. Constr. Build. Mater. 2023, 378, 131184. [Google Scholar] [CrossRef]
- Ryley, M.; Carve, M.; Piola, R.; Scardino, A.J.; Shimeta, J. Comparison of Biofouling on 3D-Printing Materials in the Marine Environment. Int. Biodeterior. Biodegrad. 2021, 164, 105293. [Google Scholar] [CrossRef]
- Levy, N.; Simon-Blecher, N.; Ben-Ezra, S.; Yuval, M.; Doniger, T.; Leray, M.; Karako-Lampert, S.; Tarazi, E.; Levy, O. Evaluating Biodiversity for Coral Reef Reformation and Monitoring on Complex 3D Structures Using Environmental DNA (EDNA) Metabarcoding. Sci. Total Environ. 2023, 856, 159051. [Google Scholar] [CrossRef]
- Fu, Y.; Guo, N.; Wang, G.; Yu, M.; Cheng, Q.; Zhang, D. Underwater Additive Manufacturing of Ti-6Al-4V Alloy by Laser Metal Deposition: Formability, Gran Growth and Microstructure Evolution. Mater. Des. 2021, 197, 109196. [Google Scholar] [CrossRef]
- Najem, J.; Akle, B. Design and Development of a Biomimetic Jellyfish Robot That Features Ionic Polymer Metal Composites Actuators. In Proceedings of the ASME 2011 Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Scottsdale, AZ, USA, 18–21 September 2011. [Google Scholar]
- Sanchez-Gonzalez, P.-L.; Díaz-Gutiérrez, D.; Leo, T.; Núñez-Rivas, L. Toward Digitalization of Maritime Transport? Sensors 2019, 19, 926. [Google Scholar] [CrossRef] [PubMed]
- Scopus. Analyze Search Results. Available online: https://www.scopus.com/term/analyzer.uri?sid=188243f8e3cdd17f881cfb7a99920bc5&origin=resultslist&src=s&s=TITLE-ABS-KEY%28%223D+printing%22%29&sort=plf-f&sdt=sisr&sot=b&sl=28&count=648&analyzeResults=Analyze+results&ref=%28underwater%29&txGid=997174eed21cc8368ab7fafa38e6098e (accessed on 2 January 2024).
- Wang, Y.; Qiu, L.C.; Chen, S.G.; Liu, Y. 3D Concrete Printing in Air and under Water: A Comparative Study on the Buildability and Interlayer Adhesion. Constr. Build. Mater. 2024, 411, 134403. [Google Scholar] [CrossRef]
- Ly, O.; Yoris-Nobile, A.I.; Sebaibi, N.; Blanco-Fernandez, E.; Boutouil, M.; Castro-Fresno, D.; Hall, A.E.; Herbert, R.J.H.; Deboucha, W.; Reis, B.; et al. Optimisation of 3D Printed Concrete for Artificial Reefs: Biofouling and Mechanical Analysis. Constr. Build. Mater. 2021, 272, 121649. [Google Scholar] [CrossRef]
- Mazhoud, B.; Perrot, A.; Picandet, V.; Rangeard, D.; Courteille, E. Underwater 3D Printing of Cement-Based Mortar. Constr. Build. Mater. 2019, 214, 458–467. [Google Scholar] [CrossRef]
- Woo, S.J.; Yang, J.M.; Lee, H.; Kwon, H.K. Comparison of Properties of 3d-Printed Mortar in Air vs. Underwater. Materials 2021, 14, 5888. [Google Scholar] [CrossRef]
- Yang, J.M.; Park, I.B.; Lee, H.; Kwon, H.K. Effects of Nozzle Details on Print Quality and Hardened Properties of Underwater 3D Printed Concrete. Materials 2023, 16, 34. [Google Scholar] [CrossRef]
- Li, L.G.; Xiao, B.F.; Fang, Z.Q.; Xiong, Z.; Chu, S.H.; Kwan, A.K.H. Feasibility of Glass/Basalt Fiber Reinforced Seawater Coral Sand Mortar for 3D Printing. Addit. Manuf. 2021, 37, 101684. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, S.; Qiu, L.; Nasr, A.A.; Liu, Y. Experimental Study on the Slump-Flow Underwater for Anti-Washout Concrete. Constr. Build. Mater. 2023, 365, 130026. [Google Scholar] [CrossRef]
- Nasr, A.A.; Chen, S.; Jin, F. Washout Resistance of Self-Protected Underwater Concrete in Freshwater and Seawater. Constr. Build. Mater. 2021, 289, 123186. [Google Scholar] [CrossRef]
- Yoris-Nobile, A.I.; Slebi-Acevedo, C.J.; Lizasoain-Arteaga, E.; Indacoechea-Vega, I.; Blanco-Fernandez, E.; Castro-Fresno, D.; Alonso-Estebanez, A.; Alonso-Cañon, S.; Real-Gutierrez, C.; Boukhelf, F.; et al. Artificial Reefs Built by 3D Printing: Systematisation in the Design, Material Selection and Fabrication. Constr. Build. Mater. 2023, 362, 129766. [Google Scholar] [CrossRef]
- Levy, N.; Berman, O.; Yuval, M.; Loya, Y.; Treibitz, T.; Tarazi, E.; Levy, O. Emerging 3D Technologies for Future Reformation of Coral Reefs: Enhancing Biodiversity Using Biomimetic Structures Based on Designs by Nature. Sci. Total Environ. 2022, 830, 154749. [Google Scholar] [CrossRef] [PubMed]
- CPSdrone 3D Printing Underwater Actually WORKS. Available online: https://www.youtube.com/watch?v=FY7lJexBUZQ (accessed on 4 January 2024).
- Baena, J.C.; Wang, C.; Fu, Y.; Kabir, I.I.; Yuen, A.C.Y.; Peng, Z.; Yeoh, G.H. A New Fabrication Method of Designed Metamaterial Based on a 3D-Printed Structure for Underwater Sound Absorption Applications. Appl. Acoust. 2023, 203, 109221. [Google Scholar] [CrossRef]
- Champion, B.T.; Jamshidi, M.; Joordens, M.A. 3D Printed Underwater Housing. In Proceedings of the World Automation Congress Proceedings, Rio Grande, PR, USA, 31 July–4 August 2016; IEEE Computer Society: Washington, DC, USA, 2016. [Google Scholar]
- Loni, Z.M.; Espinosa, H.G.; Thiel, D.V. Vertically Directed Microwave Radiation from a Floating Hemispherical Antenna. In Proceedings of the 2018 Australian Microwave Symposium, AMS 2018—Conference Proceedings, Brisbane, QLD, Australia, 6–7 February 2018; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2018; pp. 45–46. [Google Scholar]
- Khaleed, H.M.T.; Badruddin, I.A.; Saquib, A.N.; Addas, M.F.; Kamangar, S.; Yunus Khan, T.M. Novel Approach to Manufacture an AUV Propeller by Additive Manufacturing and Error Analysis. Appl. Sci. 2019, 9, 4413. [Google Scholar] [CrossRef]
- Stefanita Grigore, L.; Stefan, A.; Orban, O. Using PET-G to Design an Underwater Rover Through 3D PrintingTtechnology. Mater. Plast. 1964, 57, 189–201. [Google Scholar] [CrossRef]
- Ștefan, A.G.; Grigore, L.Ș.; Marzavan, S.; Priescu, I.; Oncioiu, I. Theoretical and Experimental Aspects Regarding the Forced Mounting of a Cylinder Containing the Electronics of a Mini Submarine. J. Mar. Sci. Eng. 2021, 9, 855. [Google Scholar] [CrossRef]
- Dileep, B.; Doddamani, M. Compressive Response of 3D Printed Graded Foams. Compos. Part C Open Access 2021, 6, 100181. [Google Scholar] [CrossRef]
- Krohmann, S.; Rautmann, L.L.; Glatzer, L.; Kosleck, S. Experimental Studies of Additive Manufacturing for Subsea Enclosures. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Hamburg, Germany, 5–10 June 2022. [Google Scholar]
- Luthy, K.; Miller, D. Case Study of a 3D Printed Underwater Housing. In Proceedings of the Oceans Conference Record (IEEE), San Diego, CA, USA, 20–23 September 2021; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2021. [Google Scholar]
- Deng, Z.; Wang, Y.; Zhang, D.; Chen, C. 3D Printing Technology Meets Marine Biofouling: A Study on Antifouling Resin for Protecting Marine Sensors. Addit. Manuf. 2023, 73, 103697. [Google Scholar] [CrossRef]
- Im, H.; Roh, S.C.; Kim, C.K. Characteristics of Thermoplastic Polyurethane Composites Containing Surface Treated Multiwalled Carbon Nanotubes for the Underwater Applications. Macromol. Res. 2013, 21, 614–623. [Google Scholar] [CrossRef]
- Kim, D.; Sasidharanpillai, A.; Lee, Y.; Lee, S. Self-Stratified Versatile Coatings for Three-Dimensional Printed Underwater Physical Sensors Applications. Nano Lett. 2021, 21, 6820–6827. [Google Scholar] [CrossRef]
- Wang, Z.D.; Sun, G.F.; Lu, Y.; Chen, M.Z.; Lan, H.F.; Bi, K.D.; Ni, Z.H. High-Performance Ti-6Al-4V with Graded Microstructure and Superior Properties Fabricated by Powder Feeding Underwater Laser Metal Deposition. Surf. Coat. Technol. 2021, 408, 126778. [Google Scholar] [CrossRef]
- Breddermann, K.; Drescher, P.; Polzin, C.; Seitz, H.; Paschen, M. Printed Pressure Housings for Underwater Applications. Ocean Eng. 2016, 113, 57–63. [Google Scholar] [CrossRef]
- Hur, B.; Morgan, J.A.; Langari, R.; Jordan, J.; Caleb, M.; Stewart, C.; Malbec, B.; James, D.K. 3-D Printed Metal and Plastic Propeller Design and Manufacturing for Small-Scale Underwater Thrusters 3D Printed Metal and Plastic Propeller Design and Manufacturing for Small-Scale Underwater Thrusters. In Proceedings of the 2019 ASEE Annual Conference & Exposition, Tampa, FL, USA, 15 June–19 October 2019. [Google Scholar]
- Chen, C.; Wang, Y.; Ge, F. Construction of Corrosion Resistant Stainless Steel Mesh and the Design for Protecting Optical Window Free from Biofouling. Ocean Eng. 2022, 264, 112564. [Google Scholar] [CrossRef]
- Calle, M.A.G.; Salmi, M.; Mazzariol, L.M.; Alves, M.; Kujala, P. Additive Manufacturing of Miniature Marine Structures for Crashworthiness Verification: Scaling Technique and Experimental Tests. Mar. Struct. 2020, 72, 102764. [Google Scholar] [CrossRef]
- Xia, X.; Lan, Y.; Zhou, T. Low-Frequency Transducer with a Periodic Displacement Amplification Structure Based on 3D Printing. Appl. Acoust. 2023, 204, 109232. [Google Scholar] [CrossRef]
- Li, W.; Wang, M.; Wang, S.; Wang, X.; Avila, A.; Kuang, X.; Mu, X.; Garciamendez, C.E.; Jiang, Z.; Manríquez, J.; et al. An Adhesive Bioink toward Biofabrication under Wet Conditions. Small 2023, 19, e2205078. [Google Scholar] [CrossRef] [PubMed]
- Lin, H.; Yin, C.; Mo, A.; Hong, G. Applications of Hydrogel with Special Physical Properties in Bone and Cartilage Regeneration. Materials 2021, 14, 235. [Google Scholar] [CrossRef]
- Chen, W.P.; Hao, D.Z.; Hao, W.J.; Guo, X.L.; Jiang, L. Hydrogel with Ultrafast Self-Healing Property Both in Air and Underwater. ACS Appl. Mater. Interfaces 2018, 10, 1258–1265. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, D.; Wang, C.; Wu, J.; Xu, X.; Yang, X.; Sun, C.; Jiang, P.; Wang, X. 3D Printing of Octopi-Inspired Hydrogel Suckers with Underwater Adaptation for Reversible Adhesion. Chem. Eng. J. 2023, 457, 141268. [Google Scholar] [CrossRef]
- de Lacalle, J.L.; Picchio, M.L.; Dominguez-Alfaro, A.; Serrano, R.R.-M.; Marchiori, B.; del Agua, I.; Lopez-Larrea, N.; Criado-Gonzalez, M.; Malliaras, G.G.; Mecerreyes, D. Hydrophobic Eutectogels as Electrodes for Underwater Electromyography Recording. ACS Mater. Lett. 2023, 5, 3340–3346. [Google Scholar] [CrossRef]
- Li, Z.; Yang, S.; Wang, D.; Shan, H.; Chen, D.; Fei, C.; Xiao, M.; Yang, Y. Focus of Ultrasonic Underwater Sound with 3D Printed Phononic Crystal. Appl. Phys. Lett. 2021, 119, 073501. [Google Scholar] [CrossRef]
- Phamduy, P.; Vazquez, M.A.; Kim, C.; Mwaffo, V.; Rizzo, A.; Porfiri, M. Design and Characterization of a Miniature Free-Swimming Robotic Fish Based on Multi-Material 3D Printing. Int. J. Intell. Robot. Appl. 2017, 1, 209–223. [Google Scholar] [CrossRef]
- Kafle, A.; Luis, E.; Silwal, R.; Pan, H.M.; Shrestha, P.L.; Bastola, A.K. 3d/4d Printing of Polymers: Fused Deposition Modelling (Fdm), Selective Laser Sintering (Sls), and Stereolithography (Sla). Polymers 2021, 13, 3101. [Google Scholar] [CrossRef] [PubMed]
- Phillips, B.T.; Allder, J.; Bolan, G.; Nagle, R.S.; Redington, A.; Hellebrekers, T.; Borden, J.; Pawlenko, N.; Licht, S. Additive Manufacturing Aboard a Moving Vessel at Sea Using Passively Stabilized Stereolithography (SLA) 3D Printing. Addit. Manuf. 2020, 31, 100969. [Google Scholar] [CrossRef]
- Li, H.; Raza, A.; Yuan, S.; AlMarzooqi, F.; Fang, N.X.; Zhang, T.J. Biomimetic On-Chip Filtration Enabled by Direct Micro-3D Printing on Membrane. Sci. Rep. 2022, 12, 8178. [Google Scholar] [CrossRef] [PubMed]
- Huang, J.; Wang, Q.; Wu, Z.; Ma, Z.; Yan, C.; Shi, Y.; Su, B. 3D-Printed Underwater Super-Oleophobic Shark Skin toward the Electricity Generation through Low-Adhesion Sliding of Magnetic Nanofluid Droplets. Adv. Funct. Mater. 2021, 31, 2103776. [Google Scholar] [CrossRef]
- Griffiths, A.; Dikarev, A.; Green, P.R.; Lennox, B.; Poteau, X.; Watson, S. AVEXIS—Aqua Vehicle Explorer for in-Situ Sensing. IEEE Robot. Autom. Lett. 2016, 1, 282–287. [Google Scholar] [CrossRef]
- Coreixas De Moraes, C.; Santiago, R.C. AUV Scaled Model Prototyping Using 3D Printing Techniques; AUV Scaled Model Prototyping Using 3D Printing Techniques. In Proceedings of the 2018 IEEE/OES Autonomous Underwater Vehicle Workshop (AUV), Porto, Portugal, 6–9 November 2018. [Google Scholar]
- Britto, R.A.; Sinha, S.; Palit, S.; Selvakumar, A. PH Monitoring IOT Controlled Biomimetic Robotic Fish. Int. J. Recent Technol. Eng. 2019, 7, 233–237. [Google Scholar]
- Thakkar, P.; Sanghvi, M.; Lekurwale, N.; Sawant, D. Lumina Remotely Operated Vehicle. In Proceedings of the 2022 IEEE Delhi Section Conference, DELCON 2022, New Delhi, India, 11–13 February 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar]
- Ziaeefard, S.; Ribeiro, G.A.; Mahmoudian, N. GUPPIE, Underwater 3D Printed Robot a Game Changer in Control Design Education. In Proceedings of the American Control Conference, Chicago, IL, USA, 1–3 July 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2015; pp. 2789–2794. [Google Scholar]
- Vasileiou, M.; Manos, N.; Vasilopoulos, N.; Douma, A.; Kavallieratou, E. <scp>kalypso</Scp> Autonomous Underwater Vehicle: A 3D-Printed Underwater Vehicle for Inspection at Fisheries. J. Mech. Robot. 2024, 16, 041003. [Google Scholar] [CrossRef]
- Song, S.; Yu, S.C. Underwater Marking AUV Using Paraffin Wax. In Proceedings of the Autonomous Underwater Vehicles 2016, AUV 2016, Tokyo, Japan, 6–9 November 2016; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2016; pp. 33–37. [Google Scholar]
- Ay, M.; Korkmaz, D.; Koca, G.O.; Bal, C.; Akpolat, Z.H.; Bingol, M.C. Mechatronic Design and Manufacturing of the Intelligent Robotic Fish for Bio-Inspired Swimming Modes. Electronics 2018, 7, 118. [Google Scholar] [CrossRef]
- Vogt, D.M.; Becker, K.P.; Phillips, B.T.; Graule, M.A.; Rotjan, R.D.; Shank, T.M.; Cordes, E.E.; Wood, R.J.; Gruber, D.F. Shipboard Design and Fabrication of Custom 3D-Printed Soft Robotic Manipulators for the Investigation of Delicate Deep-Sea Organisms. PLoS ONE 2018, 13, e0200386. [Google Scholar] [CrossRef] [PubMed]
- Zhao, S.; Wang, Q.; Fang, X.; Liang, W.; Cao, Y.; Zhao, C.; Li, L.; Liu, C.; Wang, K. Application and Development of Autonomous Robots in Concrete Construction: Challenges and Opportunities. Drones 2022, 6, 424. [Google Scholar] [CrossRef]
- Soomro, A.M.; Memon, F.H.; Lee, J.W.; Ahmed, F.; Kim, K.H.; Kim, Y.S.; Choi, K.H. Fully 3D Printed Multi-Material Soft Bio-Inspired Frog for Underwater Synchronous Swimming. Int. J. Mech. Sci. 2021, 210, 106725. [Google Scholar] [CrossRef]
- Mohd Yusoff, N.H.; Chong, C.H.; Wan, Y.K.; Cheah, K.H.; Wong, V.L. Optimization Strategies and Emerging Application of Functionalized 3D-Printed Materials in Water Treatment: A Review. J. Water Process Eng. 2023, 51, 103410. [Google Scholar] [CrossRef]
- Tijing, L.D.; Dizon, J.R.C.; Ibrahim, I.; Nisay, A.R.N.; Shon, H.K.; Advincula, R.C. 3D Printing for Membrane Separation, Desalination and Water Treatment. Appl. Mater. Today 2020, 18, 100486. [Google Scholar] [CrossRef]
- Zhang, X.; Shan, X.; Xie, T.; Miao, J. A New Sensor Inspired by the Lateral-Line System of Fish Using the Self-Powered D33 Mode Piezoelectric Diaphragm for Hydrodynamic Sensing. Mech. Syst. Signal Process 2020, 141, 106476. [Google Scholar] [CrossRef]
- Coltelli, M.A.; Catterlin, J.; Scherer, A.; Kartalov, E.P. Simulations of 3D-Printable Biomimetic Artificial Muscles Based on Microfluidic Microcapacitors for Exoskeletal Actuation and Stealthy Underwater Propulsion. Sens. Actuators A Phys. 2021, 325, 112700. [Google Scholar] [CrossRef]
- Angel, M.; Gonzales, C.; Kujala, P. 3D Printing Miniature Marine Structures Models for Structural Analysis Purpose: Is It Possible? In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Glasgow, UK, 9–14 June 2019.
- Musipov, H.N.; Nikitin, V.S.; Bakanovskaya, L.N. Technology for Subsea 3D Printing Structures for Oil and Gas Production in Arctic Region. In Proceedings of the IOP Conference Series: Materials Science and Engineering, 29 November 2017; Institute of Physics Publishing: Bristol, UK, 2017; Volume 262. Available online: https://iopscience.iop.org/article/10.1088/1757-899X/262/1/012069/meta (accessed on 30 January 2024).
- Erioli, A.; Zomparelli, A. Emergent Reefs. In Proceedings of the ACADIA 2012—Synthetic Digital Ecologies: Proceedings of the 32nd Annual Conference of the Association for Computer Aided Design in Architecture, San Francisco, CA, USA, 18–21 October 2012; ACADIA: New York, NY, USA, 2012; pp. 139–148. Available online: https://portal.findresearcher.sdu.dk/en/publications/emergent-reefs (accessed on 30 January 2024).
- Berman, O.; Levy, N.; Parnas, H.; Levy, O.; Tarazi, E. Exploring New Frontiers in Coral Nurseries: Leveraging 3D Printing Technology to Benefit Coral Growth and Survival. J. Mar. Sci. Eng. 2023, 11, 1695. [Google Scholar] [CrossRef]
- Riera, E.; Hubas, C.; Ungermann, M.; Rigot, G.; Pey, A.; Francour, P.; Rossi, F. Artificial Reef Effectiveness Changes among Types as Revealed by Underwater Hyperspectral Imagery. Restor. Ecol. 2023, 31, e13978. [Google Scholar] [CrossRef]
- Leonard, C.; Hédouin, L.; Lacorne, M.C.; Dalle, J.; Lapinski, M.; Blanc, P.; Nugues, M.M. Performance of Innovative Materials as Recruitment Substrates for Coral Restoration. Restor. Ecol. 2022, 30, e13625. [Google Scholar] [CrossRef]
- Jin, Z.; Mei, H.; Liu, H.; Pan, L.; Yan, Y.; Cheng, L. High-Strength, Superhydrophilic/Underwater Superoleophobic Multifunctional Ceramics for High Efficiency Oil-Water Separation and Water Purification. Mater. Today Nano 2022, 18, 100199. [Google Scholar] [CrossRef]
- Wang, Z.; Zhan, Z.; Chen, L.; Duan, G.; Cheng, P.; Kong, H.; Chen, Y.; Duan, H. 3D-Printed Bionic Solar Evaporator. Sol. RRL 2022, 6, 2101063. [Google Scholar] [CrossRef]
- Yao, Y.; Li, H.; Sun, Y.; Chang, Z. A Bionic Degassing Device Inspired by Gills: Application on Underwater Oil and Gas Detection. J. Bionic Eng. 2023, 20, 253–266. [Google Scholar] [CrossRef]
- Yanar, N.; Kallem, P.; Son, M.; Park, H.; Kang, S.; Choi, H. A New Era of Water Treatment Technologies: 3D Printing for Membranes. J. Ind. Eng. Chem. 2020, 91, 1–14. [Google Scholar] [CrossRef]
- Issac, M.N.; Kandasubramanian, B. Review of Manufacturing Three-Dimensional-Printed Membranes for Water Treatment. Environ. Sci. Pollut. Res. 2020, 27, 36091–36108. [Google Scholar] [CrossRef] [PubMed]
- Gu, Q.; Ng, T.C.A.; Bao, Y.; Ng, H.Y.; Tan, S.C.; Wang, J. Developing Better Ceramic Membranes for Water and Wastewater Treatment: Where Microstructure Integrates with Chemistry and Functionalities. Chem. Eng. J. 2021, 428, 130456. [Google Scholar] [CrossRef]
- Song, Y.; Wang, B.; Altemose, P.; Kowall, C.; Li, L. 3D-Printed Membranes with a Zwitterionic Hydrogel Coating for More Robust Oil-Water Separation. Ind. Eng. Chem. Res. 2020, 59, 21058–21065. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, D.; Peng, E.; Ding, J. 3D-Printed Ceramic Structures with in Situ Grown Whiskers for Effective Oil/Water Separation. Chem. Eng. J. 2019, 373, 1223–1232. [Google Scholar] [CrossRef]
- Yu, F.; Hu, Q.; Dong, L.; Cui, X.; Chen, T.; Xin, H.; Liu, M.; Xue, C.; Song, X.; Ai, F.; et al. 3D Printed Self-Driven Thumb-Sized Motors for in-Situ Underwater Pollutant Remediation. Sci. Rep. 2017, 7, srep41169. [Google Scholar] [CrossRef]
- Yan, C.; Zhang, X.; Ji, Z.; Wang, X.; Zhou, F. 3D-Printed Electromagnetic Actuator for Bionic Swimming Robot. J. Mater. Eng. Perform. 2021, 30, 6579–6587. [Google Scholar] [CrossRef]
- Mullen, A.D.; Dichek, D.J.G.; Lawrence, J.D.; Meister, M.R.; Bryson, F.E.; Hurwitz, B.C.; Spears, A.M.; Washam, P.M.; Quartini, E.; Schmidt, B.E. A Robust Compact Water Sampler for Underwater Robotic Vehicles. In Proceedings of the 2020 Global Oceans 2020: Singapore—U.S. Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2020. [Google Scholar]
- Zhuo, F.; Zhou, J.; Liu, Y.; Xie, J.; Chen, H.; Wang, X.; Luo, J.; Fu, Y.; Elmarakbi, A.; Duan, H. Kirigami-Inspired 3D-Printable MXene Organohydrogels for Soft Electronics. Adv. Funct. Mater. 2023, 33, 2308487. [Google Scholar] [CrossRef]
- Huo, J.; Wang, J.; Guo, Y.; Qiu, W.; Chen, M.; Asada, H.; Wan, F.; Song, C. Reconfigurable Design and Modeling of an Underwater Superlimb for Diving Assistance. Adv. Intell. Syst. 2023, 5, 2300245. [Google Scholar] [CrossRef]
- Khudiyev, T.; Grena, B.; Loke, G.; Hou, C.; Jang, H.; Lee, J.; Noel, G.H.; Alain, J.; Joannopoulos, J.; Xu, K.; et al. Thermally Drawn Rechargeable Battery Fiber Enables Pervasive Power. Mater. Today 2022, 52, 80–89. [Google Scholar] [CrossRef]
- He, Y.; Guo, S.; Shi, L.; Pan, S.; Wang, Z. 3D Printing Technology-Based an Amphibious Spherical Robot. In Proceedings of the 2014 IEEE International Conference on Mechatronics and Automation, IEEE ICMA 2014, Tianjin, China, 3–6 August 2014; IEEE Computer Society: Washington, DC, USA, 2014; pp. 1382–1387. [Google Scholar]
- Tran, L.G.; Park, W.T. Biomimetic Flow Sensor for Detecting Flow Rate and Direction as an Application for Maneuvering Autonomous Underwater Vehicle. Int. J. Precis. Eng. Manuf.—Green Technol. 2022, 9, 163–173. [Google Scholar] [CrossRef]
- Zheng, X.; Kamat, A.M.; Krushynska, A.O.; Cao, M.; Kottapalli, A.G.P. 3D Printed Graphene Piezoresistive Microelectromechanical System Sensors to Explain the Ultrasensitive Wake Tracking of Wavy Seal Whiskers. Adv. Funct. Mater. 2022, 32, 2207274. [Google Scholar] [CrossRef]
- Sayegh, M.A.; Daraghma, H.; Mekid, S.; Bashmal, S. Review of Recent Bio-Inspired Design and Manufacturing of Whisker Tactile Sensors. Sensors 2022, 22, 2705. [Google Scholar] [CrossRef]
- Gul, J.Z.; Su, K.Y.; Choi, K.H. Fully 3D Printed Multi-Material Soft Bio-Inspired Whisker Sensor for Underwater-Induced Vortex Detection. Soft Robot. 2018, 5, 122–132. [Google Scholar] [CrossRef]
- Cho, S.J.; Nam, T.S.; Choi, S.Y.; Kim, M.K.; Kim, S. 3D Printed Multi-Channel EEG Sensors for Zebrafish. In Proceedings of the 2015 IEEE SENSORS, Busan, Republic of Korea, 1–4 November 2015; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2015. [Google Scholar]
- Cho, S.J.; Byun, D.; Nam, T.S.; Choi, S.Y.; Lee, B.G.; Kim, M.K.; Kim, S. A 3D-Printed Sensor for Monitoring Biosignals in Small Animals. J. Healthc. Eng. 2017, 2017, 9053764. [Google Scholar] [CrossRef]
- Bräuer-Burchardt, C.; Heinze, M.; Schmidt, I.; Meng, L.; Ramm, R.; Kühmstedt, P.; Notni, G. Handheld Underwater 3D Sensor Based on Fringe Projection Technique. In Proceedings of the Videometrics, Range Imaging, and Applications XIII, Munich, Germany, 21 June 2015; SPIE: Bellingham, WA, USA, 2015; Volume 9528, p. 952809. [Google Scholar]
- Brewin, R.J.W.; Brewin, T.G.; Phillips, J.; Rose, S.; Abdulaziz, A.; Wimmer, W.; Sathyendranath, S.; Platt, T. A Printable Device for Measuring Clarity and Colour in Lake and Nearshore Waters. Sensors 2019, 19, 936. [Google Scholar] [CrossRef]
- Phamduy, P.; Vazquez, M.; Rizzo, A.; Porfiri, M. Miniature Underwater Robotic Fish for Animal-Robot Interactions. In Proceedings of the Dynamic Systems and Control Conference, Minneapolis, MN, USA, 12–14 October 2016. [Google Scholar]
- Song, Z.; Mazzola, C.; Schwartz, E.; Chen, R.; Finlaw, J.; Krieg, M.; Mohseni, K. A Compact Autonomous Underwater Vehicle With Cephalopod-Inspired Propulsion. Mar. Technol. Soc. J. 2016, 50, 88–101. [Google Scholar] [CrossRef]
- Singh Matharu, P.; Wang, Z.; Costello, J.H.; Colin, S.P.; Baughman, R.H.; Tadesse, Y.T. SoJel –A 3D Printed Jellyfish-like Robot Using Soft Materials for Underwater Applications. Ocean Eng. 2023, 279, 114427. [Google Scholar] [CrossRef]
- Takishima, Y.; Yoshida, K.; Khosla, A.; Kawakami, M.; Furukawa, H. Fully 3D-Printed Hydrogel Actuator for Jellyfish Soft Robots. ECS J. Solid State Sci. Technol. 2021, 10, 037002. [Google Scholar] [CrossRef]
- Liu, K.; Chen, W.; Yang, W.; Jiao, Z.; Yu, Y. Review of the Research Progress in Soft Robots. Appl. Sci. 2023, 13, 120. [Google Scholar] [CrossRef]
- Patterson, Z.J.; Patel, D.K.; Bergbreiter, S.; Yao, L.; Majidi, C. A Method for 3D Printing and Rapid Prototyping of Fieldable Untethered Soft Robots. Soft Robot. 2023, 10, 292–300. [Google Scholar] [CrossRef] [PubMed]
- Zhang, Y.; Kong, D.; Shi, Y.; Cai, M.; Yu, Q.; Li, S.; Wang, K.; Liu, C. Recent Progress on Underwater Soft Robots: Adhesion, Grabbing, Actuating, and Sensing. Front. Bioeng. Biotechnol. 2023, 11, 1196922. [Google Scholar] [CrossRef] [PubMed]
- Zou, Y.; Tan, P.; Shi, B.; Ouyang, H.; Jiang, D.; Liu, Z.; Li, H.; Yu, M.; Wang, C.; Qu, X.; et al. A Bionic Stretchable Nanogenerator for Underwater Sensing and Energy Harvesting. Nat. Commun. 2019, 10, 2695. [Google Scholar] [CrossRef] [PubMed]
- Peterman, D.J.; Ritterbush, K.A. Vertical Escape Tactics and Movement Potential of Orthoconic Cephalopods. PeerJ 2021, 9, e11797. [Google Scholar] [CrossRef] [PubMed]
- Xiang, Y.; Huang, S.; Huang, T.-Y.; Dong, A.; Cao, D.; Li, H.; Xue, Y.; Lv, P.; Duan, H. Superrepellency of Underwater Hierarchical Structures on Salvinia Leaf. Proc. Natl. Acad. Sci. USA 2020, 117, 2282–2287. [Google Scholar] [CrossRef] [PubMed]
- Zhao, J.; Bae, J. Microphase Separation-Driven Sequential Self-Folding of Nanocomposite Hydrogel/Elastomer Actuators. Adv. Funct. Mater. 2022, 32, 2200157. [Google Scholar] [CrossRef]
- Zhang, Y.; Wu, X.; Gong, L.; Chen, G.; Wang, X. A Bionic Adhesive Disc for Torrent Immune Locomotion Inspired by the Guizhou Gastromyzontidae. In Proceedings of the IEEE International Conference on Robotics and Biomimetics, ROBIO 2019, Dali, China, 6–8 December 2019; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2019; pp. 132–135. [Google Scholar]
- Zhou, W.; Wu, X. Enhanced Adhesion of Synthetic Discs with Micro-Patterned Margins. Biomimetics 2022, 7, 202. [Google Scholar] [CrossRef]
- Jia, N.; Wang, T.; Duan, J.; Qiang, K.; Xia, S.; Du, H.; Li, F.; Xu, Z. High-Performance Curved Piezoelectric Single-Crystal Composites via 3D-Printing-Assisted Dice and Insert Technology for Underwater Acoustic Transducer Applications. ACS Appl. Mater. Interfaces 2022, 14, 8137–8145. [Google Scholar] [CrossRef] [PubMed]
- Shen, C.; Rohde, C.; Cushing, C.W.; Li, J.; Tan, Z.J.; Du, H.; Peng, X.; Wilson, P.S.; Haberman, M.R.; Fang, N.X.; et al. Anisotropic Metallic Microlattice Structures for Underwater Operations. Adv. Eng. Mater. 2023, 25, 2201294. [Google Scholar] [CrossRef]
- de la Peña Zarzuelo, I.; Freire Soeane, M.J.; López Bermúdez, B. Industry 4.0 in the Port and Maritime Industry: A Literature Review. J. Ind. Inf. Integr. 2020, 20, 100173. [Google Scholar] [CrossRef]
- Jha, S.K. Emerging Technologies: Impact on Shipbuilding. Marit. Aff. 2016, 12, 78–88. [Google Scholar] [CrossRef]
- Baillon, P.; Dixon, S.; Faust, K.; Herman, P.; Seabring, H.; Wood, S. Stereolithography 3D Printed Resin Pressure Enclosures Applied in the Marine Environment. In Proceedings of the Oceans Conference Record (IEEE), Hampton Roads, VA, USA, 17–20 October 2022; Institute of Electrical and Electronics Engineers Inc.: Piscataway, NJ, USA, 2022. [Google Scholar]
- Kozlova, E.V.; Yakinchuk, V.V.; Starikov, K.A.; Bolshakova, A.V.; Bocharov, A.A. Life Cycle Management of the 3D-Printer Technology to Design an Underwater Drone Hull to Study the Arctic. In Proceedings of the IOP Conference Series: Earth and Environmental Science, 14 January 2021; IOP Publishing Ltd.: Bristol, UK, 2021; Volume 625. Available online: https://iopscience.iop.org/article/10.1088/1755-1315/625/1/012016 (accessed on 30 January 2024).
- Reyes, G.; Vega-Coloma, M.; Antonova, A.; Ajdary, R.; Jonveaux, S.; Flanigan, C.; Lautenbacher, N.; Rojas, O.J. Direct CO 2 Capture by Alkali-Dissolved Cellulose and Sequestration in Building Materials and Artificial Reef Structures. Adv. Mater. 2023, 35, e2209327. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).