
Establishment of a Pressure Variation Model for the State Estimation of an Underwater Vehicle

 ,
,  , , , and
, , , and
Abstract
1. Introduction
2. Methodology and Results
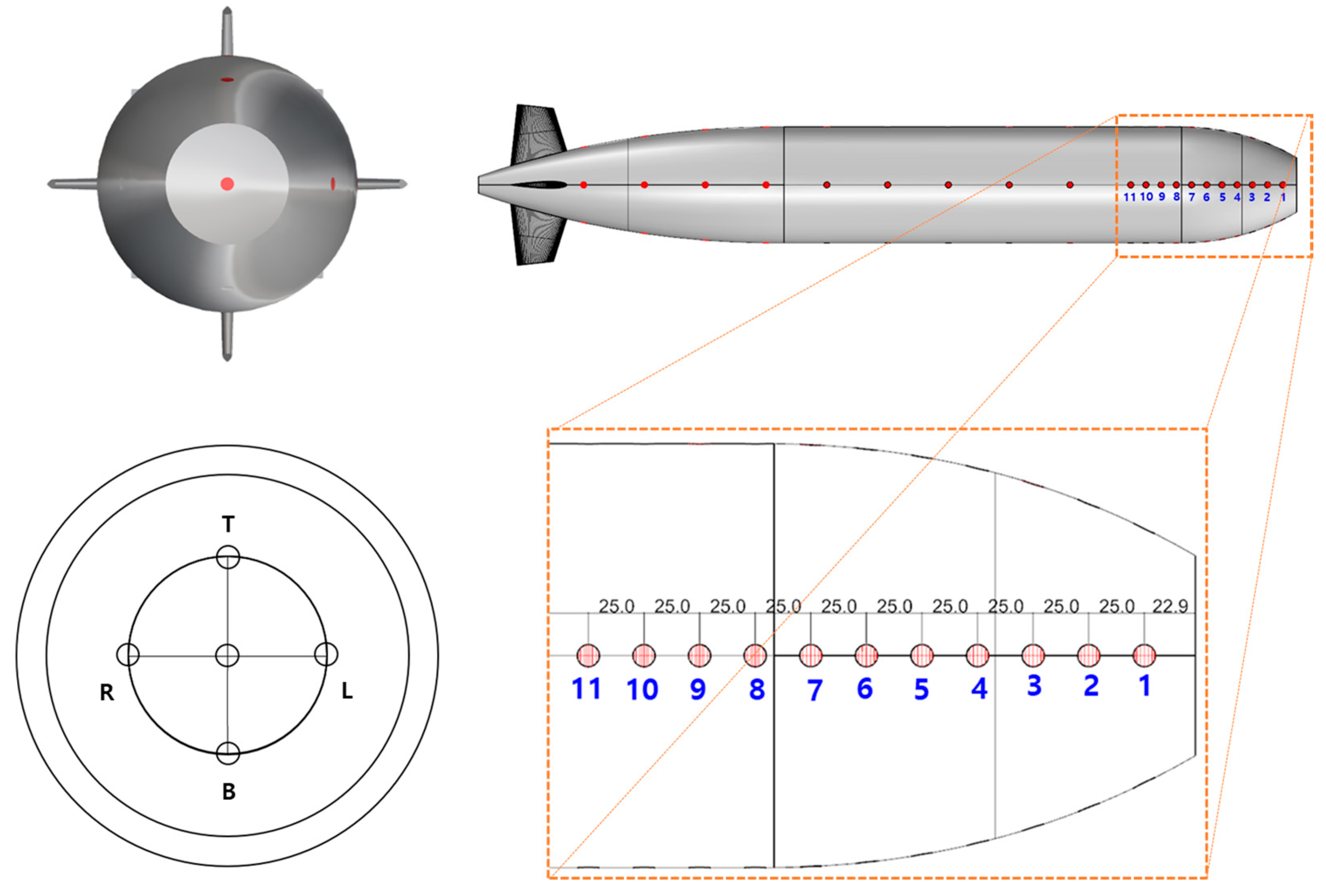
2.1. Test Model
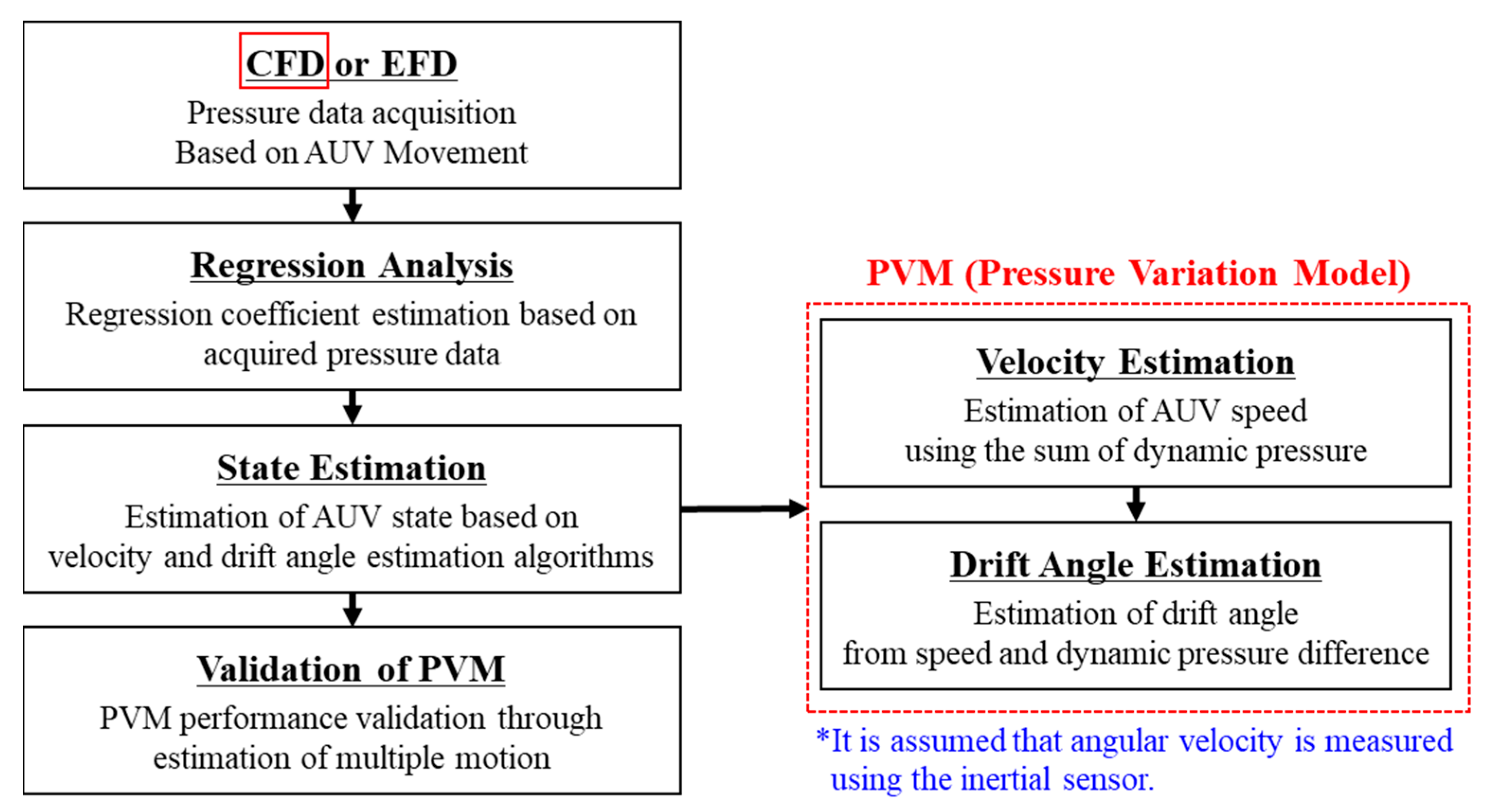
2.2. Pressure Variation Model (PVM)
2.2.1. Velocity Estimation
2.2.2. State Estimation
2.3. Flow Simulation
2.3.1. Governing Equation and Boundary Condition
2.3.2. Simulation Set-Up
2.4. Numerical Results


3. Conclusions
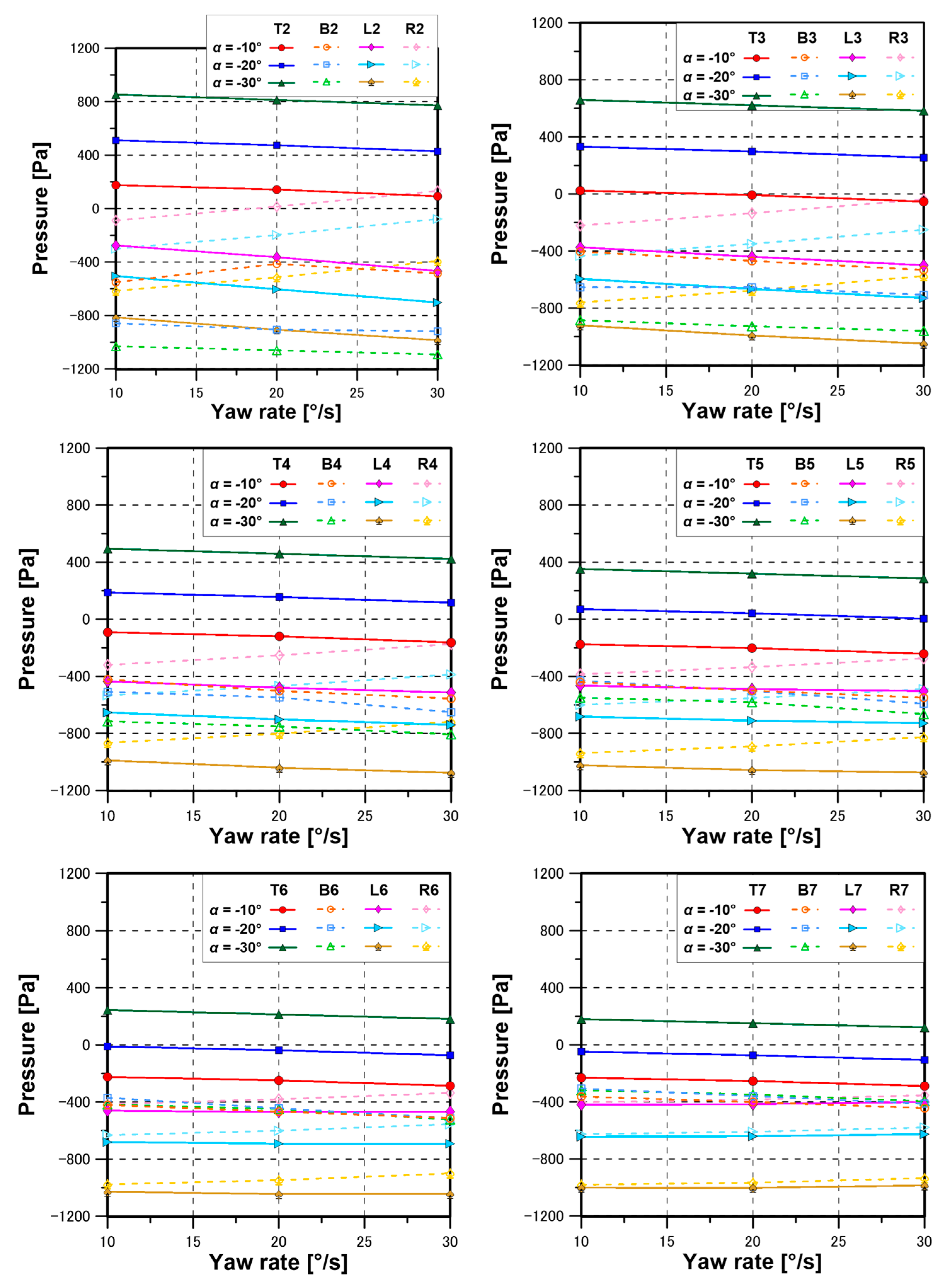
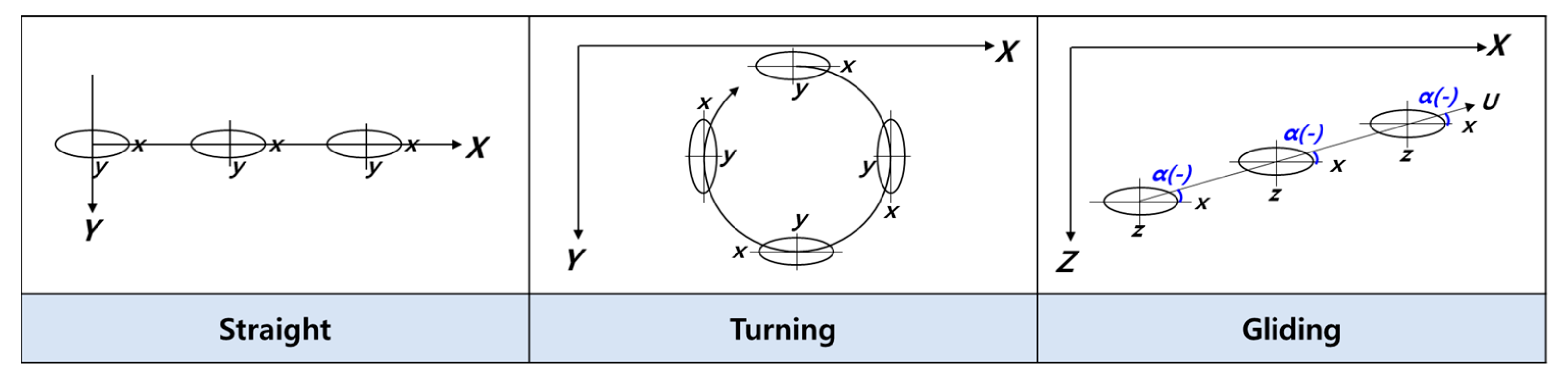
- The dynamic pressure characteristics were analyzed by numerical simulations for straight, turning, and gliding motions under speed, angular velocity, and angle of attack conditions.
- The coefficients for the PVM were derived by performing regression analysis on the dynamic pressure obtained from numerical simulations, considering the coefficient of determination and the MAE for evaluation.
- The state estimation algorithm was presented by combining the regression equations of the pressure sensors array to form an inverse matrix. Furthermore, it was validated for single and multiple motions, confirming the targeted prediction accuracy within 15%.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| PVM | pressure variation model |
| UUVs | unmanned underwater vehicles |
| LLSs | lateral line systems |
| ALLSs | artificial lateral line systems |
| ALL | artificial lateral line |
| AUV | autonomous underwater vehicle |
| R, L, T, B | pressure sensor position: right (starboard), left (port), top, bottom |
| PVs | pressure variations |
| MAE | mean absolute error |
| CFD | computational fluid dynamics |
| EFD | experimental fluid dynamics |
| RANS | Reynolds-averaged Navier–Stokes |
| SIMPLE | semi-implicit method for pressure-linked equation |
| SST | shear stress transport |
| ITTC | International Towing Tank Conference |
References
- Chamber, L.D.; Akanyeti, O.; Venturelli, R.; Jezov, J.; Brown, J.; Kruusmaa, M.; Fiorini, P.; Megill, W.M. A fish perspective: Detecting flow features while moving using an artificial lateral line in steady and unsteady flow. J. R. Soc. Interface 2014, 11, 20140467. [Google Scholar] [CrossRef] [PubMed]
- Levi, D.V.; Francis, D.L.; Hong, L.; Xiaobo, T.; Derek, A.P. Distributed flow estimation and closed-loop control of an underwater vehicle with a multi-modal artificial lateral line. Bioinspir. Biomim. 2014, 10, 025002. [Google Scholar]
- Strokina, N.; Kamarainen, J.K.; Tuhtan, J.A.; Fuentes-Perez, J.F.; Kruusmaa, M. Joint estimation of bulk flow velocity and angle using a later line probe. IEEE Trans. Instrum. Meas. 2016, 65, 601–613. [Google Scholar] [CrossRef]
- Wang, W.; Li, Y.; Zhang, X.; Wang, C.; Chen, S.; Xie, G. Speed evaluation of a freely swimming robotic fish with an artificial lateral line. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 4737–4742. [Google Scholar]
- Xu, Y.; Mohseni, K. A pressure sensory system inspired by the fish lateral line: Hydrodynamic force estimation and wall detection. IEEE J. Ocean. Eng. 2016, 42, 532–543. [Google Scholar] [CrossRef]
- Ali, A.; Hong, L.; Montassar, A.S.; Kalyanmoy, D.; Xiaobo, T. Reliable underwater dipole source characteristics in 3D space by an optimally designed artificial lateral line system. Bioinspir. Biomim. 2017, 12, 036010. [Google Scholar]
- Yen, W.K.; Sierra, D.M.; Guo, J. Controlling a robotic fish to swim along a wall using hydrodynamic pressure feedback. IEEE J. Ocean. Eng. 2018, 43, 369–380. [Google Scholar] [CrossRef]
- Liu, G.; Wang, M.; Wang, A.; Wang, S.; Yang, T.; Malekian, R.; Li, Z. Research on flow field perception based on artificial lateral line sensor system. Sensors 2018, 18, 838. [Google Scholar] [CrossRef]
- Zheng, X.; Wang, C.; Fan, R.; Xie, G. Artificial lateral line based local sensing between two adjacent robotic fish. Bioinspir. Biomim. 2018, 13, 016002. [Google Scholar] [CrossRef] [PubMed]
- Zheng, X.; Wang, W.; Xiong, M.; Xie, G. Online state estimation of a fin-actuated underwater robot using artificial lateral line system. IEEE Trans. Robot. 2020, 36, 472–487. [Google Scholar] [CrossRef]
- Lighthill, J. Estimates of pressure differences across the head of a swimming clupeid fish. Philos. Trans. Biol. Sci. 1993, 341, 129–140. [Google Scholar]
- ITTC. ITTC-Recommended Procedures and Guidelines: Practical Guidelines for Ship CFD Application. Tech. Rep. 2011, 3, 1–18. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length overall [m] | 1.345 |
| Max. diameter [m] | 0.191 |
| Design speed [knots] | 3.0 |
| Motion | Motion Variable | Note |
|---|---|---|
| Straight | U = 1.0~4.0 [knots] *Interval 0.5 knots | α = 0, β = 0, r = 0, q = 0 |
| Turning | U = 2.0~4.0 [knots] *Interval 1.0 knots r = 0~30 [deg/s] *Interval 5 deg/s | α = 0, β = 0, r ≠ 0, q = 0 |
| Gliding | U = 1.0~4.0 [knots] *Interval 0.5 knots α = 0~−30 [deg] *Interval 5 deg | α ≠ 0, β = 0, r = 0, q = 0 |
| Motion | Sensor | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Straight (C1, C6) | R2 | 1.00 | 0.99 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 1.00 | 0.99 | 0.99 | 0.99 |
| MAE | 0.24 | 0.24 | 0.28 | 0.27 | 0.25 | 0.23 | 0.21 | 0.38 | 0.42 | 0.42 | 0.42 | |
| Turning (C2, C3) | R2 | 0.93 | 0.94 | 0.95 | 0.90 | 0.74 | 0.70 | 0.84 | 0.94 | 0.94 | 0.94 | 0.94 |
| MAE | 6.62 | 2.34 | 0.27 | 0.33 | 0.32 | 0.30 | 0.26 | 0.24 | 0.37 | 0.39 | 11.48 | |
| Gliding (C4, C5) | R2 | 0.12 | 0.92 | 0.97 | 0.97 | 0.96 | 0.96 | 0.97 | 0.97 | 0.97 | 0.97 | 0.97 |
| MAE | 24.87 | 17.28 | 5.25 | 3.18 | 3.30 | 3.22 | 3.30 | 4.36 | 5.60 | 6.26 | 6.67 |
| Motion | Sensor | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Gliding (D1, D4) | R2 | 0.93 | 0.99 | 1.00 | 0.99 | 0.97 | 0.96 | 0.94 | 0.97 | 0.98 | 0.97 | 0.97 |
| MAE | 29.42 | 16.00 | 6.05 | 12.05 | 18.91 | 24.77 | 35.44 | 22.39 | 18.21 | 21.29 | 26.42 | |
| Turning (D2, D3) | R2 | 0.98 | 0.99 | 0.99 | 0.99 | 0.98 | 0.94 | 0.52 | 0.64 | 0.20 | 0.84 | 0.94 |
| MAE | 10.03 | 14.62 | 2.37 | 11.14 | 22.04 | 49.06 | 947.1 | 1097 | 1567 | 795.9 | 710.5 |
| Sensor | C1 | C2 | C3 | C4 | C5 | C6 | D1 | D2 | D3 | D4 |
|---|---|---|---|---|---|---|---|---|---|---|
| 1 | −305.1 | −396.1 | −206.1 | −3803.3 | 1976.2 | −174.5 | −1533.5 | −2328.1 | 1947.2 | 145.28 |
| 2 | −64.5 | −364.6 | −2336.0 | −52.7 | −543.6 | −177.0 | −1350.0 | 97.21 | 829.76 | 46.93 |
| 3 | −288.4 | −328.4 | −1701.4 | −510.0 | −34.3 | −179.5 | −1098.3 | 264.52 | 480.09 | −10.02 |
| 4 | −433.6 | −295.8 | −1311.6 | −307.3 | 31.0 | −180.4 | −858.9 | 5.64 | 358.47 | −18.15 |
| 5 | −515.2 | −257.3 | −1119.0 | −209.4 | 36.3 | −180.5 | −656.3 | −79.53 | 248.60 | −21.85 |
| 6 | −535.6 | −232.4 | −1075.2 | −209.8 | 42.2 | −180.1 | −488.2 | −52.10 | 128.54 | −21.81 |
| 7 | −488.6 | −230.2 | −1192.8 | −252.3 | 42.4 | −179.7 | −365.5 | 11.14 | 26.08 | −22.23 |
| 8 | −323.7 | −228.5 | −1522.9 | −254.4 | −6.0 | −183.5 | −325.8 | −36.75 | 29.30 | −13.58 |
| 9 | −212.7 | −236.8 | −1743.7 | −261.3 | −25.1 | −181.9 | −297.3 | −31.41 | 11.47 | 58.43 |
| 10 | −158.8 | −244.4 | −1843.9 | −252.2 | −23.4 | −181.0 | −265.1 | −23.95 | −18.61 | 104.23 |
| 11 | −126.1 | −248.1 | −1900.1 | −20.1 | −229.9 | −180.4 | −240.3 | −24.64 | −41.54 | 144.74 |
| U | 1.0 | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 | 4.0 |
|---|---|---|---|---|---|---|---|
| Predicted (knots) | 0.991 | 1.498 | 2.002 | 2.504 | 3.004 | 3.498 | 3.999 |
| Relative Err. (%) | −0.944 | −0.109 | 0.098 | 0.163 | 0.118 | −0.048 | −0.016 |
| U | 2.0 | 3.0 | 4.0 | |||
|---|---|---|---|---|---|---|
| r | Predicted (Knots) | Relative Err. (%) | Predicted (Knots) | Relative Err. (%) | Predicted (Knots) | Relative Err. (%) |
| 0 | 2.004 | 0.176 | 3.005 | 0.179 | 3.999 | 0.035 |
| 5 | 2.001 | 0.049 | 3.007 | 0.223 | 3.997 | 0.087 |
| 10 | 2.012 | 0.606 | 3.015 | 0.499 | 4.017 | 0.417 |
| 15 | 2.001 | 0.046 | 3.022 | 0.737 | 4.010 | 0.262 |
| 20 | 2.001 | 0.034 | 3.000 | −0.006 | 4.015 | 0.377 |
| 25 | 2.016 | 0.297 | 2.994 | −0.200 | 3.984 | −0.400 |
| 30 | 2.045 | 2.241 | 2.995 | −0.170 | 3.978 | −0.544 |
| U | 1.0 | 2.0 | 3.0 | 4.0 | ||||
|---|---|---|---|---|---|---|---|---|
| α | Predicted (Knots) | Relative Err. (%) | Predicted (Knots) | Relative Err. (%) | Predicted (Knots) | Relative Err. (%) | Predicted (Knots) | Relative Err. (%) |
| 0 | 0.995 | −0.484 | 2.001 | 0.057 | 3.002 | 0.079 | 4.000 | −0.008 |
| −5 | 1.022 | 2.235 | 2.026 | 1.278 | 3.018 | 0.604 | 4.012 | 0.293 |
| −10 | 1.041 | 4.099 | 2.012 | 0.605 | 2.984 | −0.537 | 3.952 | −1.201 |
| −15 | 1.058 | 5.775 | 1.998 | −0.112 | 2.966 | −1.145 | 3.911 | −2.215 |
| −20 | 1.065 | 6.492 | 2.003 | 0.132 | 2.933 | −2.225 | 3.868 | −3.305 |
| −25 | 1.008 | 0.761 | 1.977 | −1.142 | 2.905 | −3.173 | 3.835 | −4.137 |
| −30 | 0.997 | −0.315 | 2.089 | 4.450 | 3.129 | 4.299 | 4.179 | 4.472 |
| U | 1.0 | 1.5 | 2.0 | 2.5 | 3.0 | 3.5 | 4.0 |
|---|---|---|---|---|---|---|---|
| Predicted | 1.33 | 0.58 | 0.32 | 0.20 | 0.14 | 0.11 | 0.08 |
| Predicted | 1.18 | 0.51 | 0.29 | 0.18 | 0.13 | 0.09 | 0.07 |
| U | 2.0 | 3.0 | 4.0 | |||
|---|---|---|---|---|---|---|
| r | Predicted | Predicted | Predicted | Predicted | Predicted | Predicted |
| 0 | 0.32 | 0.29 | 0.14 | 0.13 | 0.08 | 0.07 |
| 5 | 0.38 | 0.39 | 0.19 | 0.31 | 0.12 | 0.23 |
| 10 | 0.32 | 0.15 | 0.17 | −0.31 | 0.14 | 0.14 |
| 15 | 0.33 | 0.21 | 0.16 | 0.02 | 0.14 | 0.01 |
| 20 | 0.33 | 0.18 | 0.14 | 0.04 | 0.10 | −0.03 |
| 25 | 0.33 | 0.21 | 0.14 | 0.00 | 0.07 | −0.04 |
| 30 | 0.31 | 0.37 | 0.14 | −0.07 | 0.07 | −0.12 |
| U | 1.0 | 2.0 | 3.0 | 4.0 | ||||
|---|---|---|---|---|---|---|---|---|
| Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | |
| 0 | 1.32 | - | 0.32 | - | 0.14 | - | 0.08 | - |
| −5 | −3.75 | −25.07 | −4.84 | −3.23 | −5.09 | 1.86 | −5.19 | 3.78 |
| −10 | −8.36 | −16.43 | −9.91 | −0.93 | −10.31 | 3.12 | −10.50 | 5.04 |
| −15 | −12.57 | −16.22 | −14.99 | −0.04 | −15.46 | 3.08 | −15.82 | 5.48 |
| −20 | −16.90 | −15.48 | −19.80 | −0.99 | −20.82 | 4.11 | −21.27 | 6.34 |
| −25 | −24.10 | −3.61 | −25.74 | 2.95 | −26.81 | 7.23 | −27.27 | 9.07 |
| −30 | −30.18 | 0.60 | −27.66 | −7.81 | −27.58 | −8.08 | −27.28 | −9.08 |
| U | 1.0 | 2.0 | 3.0 | 4.0 | ||||
| Predicted | ||||||||
| 0 | 1.17 | 0.29 | 0.13 | 0.07 | ||||
| −5 | 1.12 | 0.28 | 0.13 | 0.07 | ||||
| −10 | 1.08 | 0.29 | 0.13 | 0.07 | ||||
| −15 | 1.00 | 0.29 | 0.13 | 0.08 | ||||
| −20 | 1.06 | 0.29 | 0.13 | 0.08 | ||||
| −25 | 1.13 | 0.30 | 0.14 | 0.08 | ||||
| −30 | 1.16 | 0.27 | 0.12 | 0.07 | ||||
| Motion | Motion Variable | Note |
|---|---|---|
| Turning w/drift | U = 3.0 [knots] β = 10, 20 [deg] r = 10, 20, 30 [deg/s] | α = 0, β ≠ 0, r ≠ 0, q = 0 |
| Gliding w/drift | U = 1.5, 3.0 [knots] α = −10, −20 [deg] β = 10, 20 [deg] | α ≠ 0, β ≠ 0, r = 0, q = 0 |
| Spiral | U = 3.0 [knots] α = −10, −20, −30 [deg] r = 10, 20, 30 [deg/s] | α ≠ 0, β = 0, r ≠ 0, q = 0 |
| r | 10 | 20 | 30 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| β | 0 | 10 | 20 | 0 | 10 | 20 | 0 | 10 | 20 |
| Predicted (knots) | 3.004 | 2.960 | 2.681 | 2.994 | 3.059 | 2.934 | 2.996 | 3.182 | 3.116 |
| Relative Err. (%) | 0.119 | 1.354 | 10.64 | 0.196 | 1.947 | 2.204 | 0.134 | 6.071 | 3.865 |
| U | 1.5 | 3.0 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| α | −10 | −20 | −10 | −20 | ||||||||
| β | 0 | 10 | 20 | 0 | 10 | 20 | 0 | 10 | 20 | 0 | 10 | 20 |
| Predicted (knots) | 1.525 | 1.527 | 1.483 | 1.534 | 1.546 | 1.475 | 2.984 | 3.004 | 2.921 | 2.933 | 2.987 | 2.910 |
| Relative Err. (%) | 1.655 | 1.765 | 1.109 | 2.227 | 3.040 | 1.693 | 0.545 | 0.110 | 2.631 | 2.233 | 0.426 | 3.010 |
| α | −10 | −20 | −30 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| r | 10 | 20 | 30 | 10 | 20 | 30 | 10 | 20 | 30 |
| Predicted (knots) | 3.115 | 3.019 | 3.084 | 2.625 | 3.082 | 3.129 | 2.982 | 2.982 | 3.352 |
| Relative Err. (%) | 3.810 | 0.619 | 2.799 | 12.52 | 2.733 | 4.297 | 0.623 | 0.612 | 11.73 |
| r | 10 | 20 | 30 | |||
|---|---|---|---|---|---|---|
| β | ||||||
| 0 | 0.17 | 0.14 | 0.14 | |||
| 10 | 0.15 | 0.15 | 0.13 | |||
| 20 | 0.19 | 0.16 | 0.14 | |||
| r | 10 | 20 | 30 | |||
| β | Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | Predicted | Relative Err. (%) |
| 0 | −0.32 | - | 0.03 | - | −0.06 | - |
| 10 | 10.83 | 8.29 | 10.21 | 2.07 | 10.34 | 3.44 |
| 20 | 24.79 | 23.93 | 20.70 | 3.50 | 19.41 | −2.94 |
| −10 | ||||||||
| U | 1.5 | 3.0 | ||||||
| Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | |
| 0 | −9.45 | −5.48 | 0.49 | - | −10.31 | 3.12 | 0.13 | - |
| 10 | −8.83 | −11.72 | 10.17 | 1.66 | −9.88 | −1.18 | 10.16 | 1.64 |
| 20 | −9.97 | −0.31 | 22.04 | 10.19 | −10.70 | 7.01 | 22.06 | 10.30 |
| −20 | ||||||||
| U | 1.5 | 3.0 | ||||||
| Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | |
| 0 | −18.85 | −5.73 | 0.49 | - | −20.82 | 4.11 | 0.13 | - |
| 10 | −19.45 | −2.73 | 9.63 | −3.69 | −21.07 | 5.33 | 9.86 | −1.44 |
| 20 | −21.16 | 5.82 | 20.90 | 4.51 | −21.22 | 6.09 | 20.59 | 2.97 |
| −10 | −20 | −30 | ||||
|---|---|---|---|---|---|---|
| r | Predicted | Relative Err. (%) | Predicted | Relative Err. (%) | Predicted | Relative Err. (%) |
| 10 | −10.03 | 0.29 | −28.71 | 43.57 | −33.94 | 13.12 |
| 20 | −9.96 | −0.38 | −20.89 | 4.45 | −33.87 | 12.92 |
| 30 | −9.89 | −1.14 | −20.55 | 2.77 | −26.94 | −10.20 |
| U | −10 | −20 | −30 | |||
| r | Predicted | |||||
| 10 | 0.29 | −0.57 | −0.03 | |||
| 20 | 0.42 | 0.22 | 0.08 | |||
| 30 | 0.69 | 0.43 | 0.91 | |||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, J.-H.; Mai, T.L.; Cho, A.; Heo, N.; Yoon, H.K.; Park, J.-Y.; Byun, S.-H. Establishment of a Pressure Variation Model for the State Estimation of an Underwater Vehicle. Appl. Sci. 2024, 14, 970. https://doi.org/10.3390/app14030970
Kim J-H, Mai TL, Cho A, Heo N, Yoon HK, Park J-Y, Byun S-H. Establishment of a Pressure Variation Model for the State Estimation of an Underwater Vehicle. Applied Sciences. 2024; 14(3):970. https://doi.org/10.3390/app14030970
Chicago/Turabian StyleKim, Ji-Hye, Thi Loan Mai, Aeri Cho, Namug Heo, Hyeon Kyu Yoon, Jin-Yeong Park, and Sung-Hoon Byun. 2024. "Establishment of a Pressure Variation Model for the State Estimation of an Underwater Vehicle" Applied Sciences 14, no. 3: 970. https://doi.org/10.3390/app14030970
APA StyleKim, J.-H., Mai, T. L., Cho, A., Heo, N., Yoon, H. K., Park, J.-Y., & Byun, S.-H. (2024). Establishment of a Pressure Variation Model for the State Estimation of an Underwater Vehicle. Applied Sciences, 14(3), 970. https://doi.org/10.3390/app14030970