1. Introduction
Material handling procedures have significant impacts on the cost and delivery of materials or goods; however, traditional material handling methods that rely on human labor or manned vehicles have limitations in terms of speed, accuracy, and flexibility. Thus, automated material handling systems have emerged as an essential tool for optimizing production, reducing costs, and ensuring the timely delivery of products. In particular, an automated guided vehicle (AGV) that transports specific objects within a workspace is one of the most promising technologies for automation of material handling procedures [
1]. With the recent proliferation of AGVs in the manufacturing and logistics industries, much attention is paid to the operations management of large AGV systems with multiple AGVs [
2,
3,
4,
5].
AGVs are used to transport materials from one place to another within manufacturing shopfloors and distribution centers, demonstrating a high degree of autonomy and flexibility [
6,
7,
8]. To operate an AGV system efficiently, AGV scheduling, a decision-making process that allocates appropriate AGV vehicles and tasks to multiple AGVs, plays an important role. AGV scheduling, which focuses on efficient utilization of AGVs, involves several sub-decisions such as job and AGV selection and routing [
9,
10,
11]. However, given the complexity of modern manufacturing environments, characterized by complex shopfloor conditions and diverse operational requirements, establishing an efficient AGV schedule is not an easy task and requires significant effort [
12,
13].
This paper proposes a simulation-based approach for establishing an AGV scheduling policy for practical shopfloors. The AGV scheduling policy in this paper consists of three kinds of rules: the job selection rule, the AGV selection rule, and the charging station selection rule. Conventional AGV scheduling methods prioritize the first two types of rules; however, it is crucial to acknowledge the significant impact of battery charging on the efficiency of AGV systems.
Another practical issue considered in this paper is the limited buffer capacity, where a buffer denotes work-in-process at a specific place. Many manufacturing plants impose limitations on the buffer capacity and maximum buffer size within their production process due to congestion control and safety concerns. In such shopfloors, production is halted when the buffer size reaches the limitation, and it is resumed after the buffer size decreases. The buffer capacity limitation can also affect the performance of AGV scheduling.
This paper applies the discrete event simulation (DES) technique to multi-AGV scheduling under limited buffer capacity and battery charging. A simulation model for shopfloors with a multi-AGV system is developed using the commercial DES software, FlexSim. Note that the structure of the simulation model is motivated by the practical shopfloor of an automotive part manufacturer in Korea. Experimental results demonstrate that optimal AGV scheduling can be obtained through multi-scenario simulation experiments.
The remainder of this paper is organized as follows:
Section 2 reviews existing studies addressing the AGV scheduling problem.
Section 3 discusses the main issues related to buffer capacity limitations and battery charging in a practical shopfloor. We also propose some scheduling rules related to work and AGV selection, as well as charging station selection.
Section 4 presents a simulation model for multi-AGV scheduling in a practical shopfloor and demonstrates that the optimal AGV scheduling policy can be derived through multi-scenario experiments. Finally,
Section 5 summarizes the conclusions of this study, presents future research directions, and concludes.
2. Literature Review
Numerous researchers have employed different approaches to address AGV scheduling issues. Typically, AGV scheduling entails determining job selection rules for assigning specific transport goods to AGVs and AGV selection rules for choosing suitable AGVs from the available pool. These two key decisions, job selection and AGV selection, are fundamental to AGV scheduling and have been the subject of numerous prior studies [
14,
15,
16,
17,
18]. However, early research in this field mainly focused on small-scale AGV operations in limited-sized workshops, and practical operational issues such as AGV battery charging and buffer capacity limitations were not considered.
Meanwhile, in recent years, researchers have dedicated significant attention to the development of practical AGV scheduling methods applicable in real work environments. These studies propose scheduling models and optimization algorithms that consider real-world operational issues such as buffer capacity limitations and AGV battery charging.
In real manufacturing environments, buffer capacity limitations play an important role in the efficiency and flexibility of the production process. Some physical manufacturing sites have limited buffer capacity for a variety of reasons, including the need to effectively manage work-in-process (WIP) and meet short lead times. Therefore, it is important to consider factors such as buffer capacity limitations in order to establish scheduling suitable for real environments. There is existing research that addresses the impact of buffer capacity limitations on job scheduling.
Wang et al. [
19] discussed the issue of scheduling jobs for multiple multiload AGVs. The study considered the transportation time between these AGVs and the processing time between machines, addressing a situation where there is a limitation on the input buffer capacity of each machine. In a similar study to the previous work, the literature by Wang et al. [
20] also addressed the multi-load AGV scheduling problem due to limited buffer capacity. A heuristic algorithm based on simulated annealing was proposed to minimize the maximum completion time and utilize it in a real environment. Naeem et al. [
21] proposed a mathematical model that integrates the scheduling of yard cranes and AGVs at a container terminal and solved the scheduling problem by reflecting new constraints in the model to consider limited buffer capacity and storage allocation of containers.
Meanwhile, studies on the topic of AGV battery charging have also looked into issues like power management and energy efficiency. Li et al. [
22] developed a multi-objective nonlinear programming model based on a genetic algorithm to minimize the maximum completion time in a flexible manufacturing cell, considering the battery charging and waiting time of AGVs. Additionally, the influence of various loads on AGV power consumption was discussed. Yang et al. [
23] focused on optimizing AGV scheduling in automated container terminals (ACTs) and specifically conducted research on scheduling strategies considering battery replacement and speed control. Additionally, they proposed a mixed integer programming (MIP) model designed to minimize carbon dioxide emissions and delays caused by AGV operation and developed a solution based on genetic algorithms. Sun et al. [
24] addressed the AGV scheduling problem considering the battery status of the AGV to solve the problem of AGV utilization rate and high workload imbalance in ACTs and proposed a collaborative scheduling model based on simulated annealing (SA) and genetic algorithm (GA). Singh et al. [
25] introduced a mixed integer linear programming (MILP) model and a heuristic algorithm as a solution to the AGV scheduling problem and proved that efficient scheduling considering AGV battery constraints is possible through experiments using data from the actual shopfloor. Meanwhile, Abderrahim et al. [
26] addressed job scheduling considering battery constraints in AGV-based manufacturing operations and showed that productivity and energy consumption in manufacturing facilities can be optimized through AGV scheduling and battery charging.
The common feature of the above studies is that they focus on improving work optimization and energy efficiency in manufacturing environments by approaching the scheduling problem by considering buffer capacity limitations and AGV battery charging. Each study uses different optimization techniques and models to increase the utilization of AGVs and proposes effective scheduling solutions considering real-world environmental constraints, such as limited buffer capacity, battery charging, etc. However, although these studies present scheduling models applying metaheuristics and mathematical methodologies, it can be seen that studies using discrete event-based simulations for AGV scheduling are not clearly addressed. These simulations help model AGV behavior in realistic operating environments and proactively identify potential problems and optimization opportunities. Therefore, the scheduling study with discrete event-based simulation of AGVs is an important study that can show better performance in the real operational environment. Therefore, this paper aims to develop a simulation model for a shopfloor with limited buffer capacity and battery charging and apply it to find the optimal AGV scheduling rules.
3. Multi-AGV Scheduling Rules for Practical Shopfloors
3.1. Practical Manufacturing Shopfloor with Limited Buffer Capacity and Charging Policy
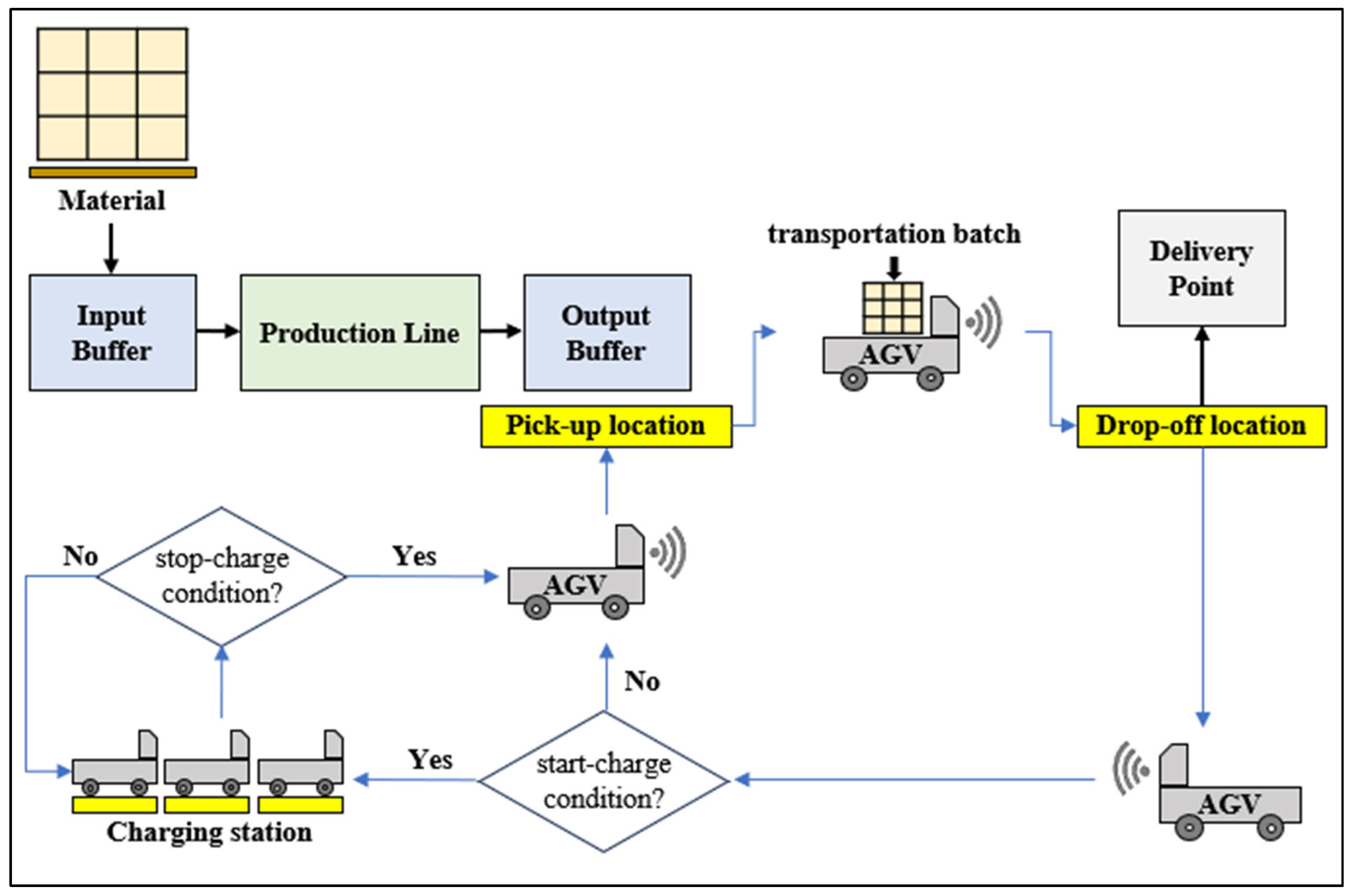
Figure 1 depicts the transportation procedure of AGVs considered in this paper, where AGVs are used to transport a batch of finished goods from the production line to the delivery point. The finished goods are produced in the production line and forwarded to the pickup location. The transportation batches waiting at the pickup location constitute the output buffer of the production line, and they have to wait at the pickup location until an AGV comes and picks them up.
Initially, AGVs stay in charging stations, and one of them is requested to perform the transportation procedure whenever a transportation batch appears at the pickup location. Then, the AGV visits the pickup location to load the batch to transport, travels to the drop-off location, and unloads the batch. After the transportation batch is unloaded, we have to check the start-charge condition, and the AGV returns to a charging station if and only if this condition is met. Otherwise, the AGV continues to perform the transportation procedure for the next transportation batches. In this paper, the start-charge condition is defined by two sub-conditions.
Sub-condition 1 for start-charge: every pickup location in the entire shopfloor is empty. Sub-condition 2 for start-charge: the battery level of the AGV is lower than the pre-defined threshold,
. The start-charge condition is met if one of those two sub-conditions is satisfied. Typically, multi-AGV systems contain multiple charging stations. In this paper, a charging station for an AGV satisfying the start-charge condition is chosen by applying the charging station selection rules listed in
Table 1.
For the transportation procedure in
Figure 1, this paper considers two practical issues: limited buffer capacity and battery charging. First, limited buffer capacity indicates that the capacity of the pickup location is limited. Let
denote the
th production line in a given shopfloor,
the number of transportation batches in the pickup location for
, and
the buffer capacity of
.
can forward finished goods to the pickup location only if
. In contrast, the manufacturing process of
is temporarily halted when
, and
can resume its process when
. This constraint reflects the limited space for storing products or items, and it can help mitigate the excessive work-in-process (WIP).
Second, battery charging is also an important issue in practical multi-AGV systems, and the performance of any AGV scheduling approach will be overestimated if battery charging is ignored. The transportation procedure in
Figure 1 contains two conditions related to battery charging: start-charge and stop-charge. While the former is explained above, the latter is used to determine if an AGV at a charging station can receive the transportation request. In other words, an AGV can start the transportation procedure for a transportation batch if and only if it satisfies the stop-charge condition, which is characterized by two sub-conditions as follows:
Sub-condition 1 for stop-charge: there are one or more production lines that have a non-empty output buffer.
Sub-condition 2 for stop-charge: the battery level of the AGV is higher than the pre-defined threshold, , and an AGV at the charging station can start the transportation procedure if and only if both of the two sub-conditions are satisfied.
3.2. AGV Scheduling Rule
AGV scheduling involves a comprehensive set of decision-making mechanisms that determine the assignment of jobs to AGVs, the selection of AGVs for specific transport tasks, and the utilization of charging stations.
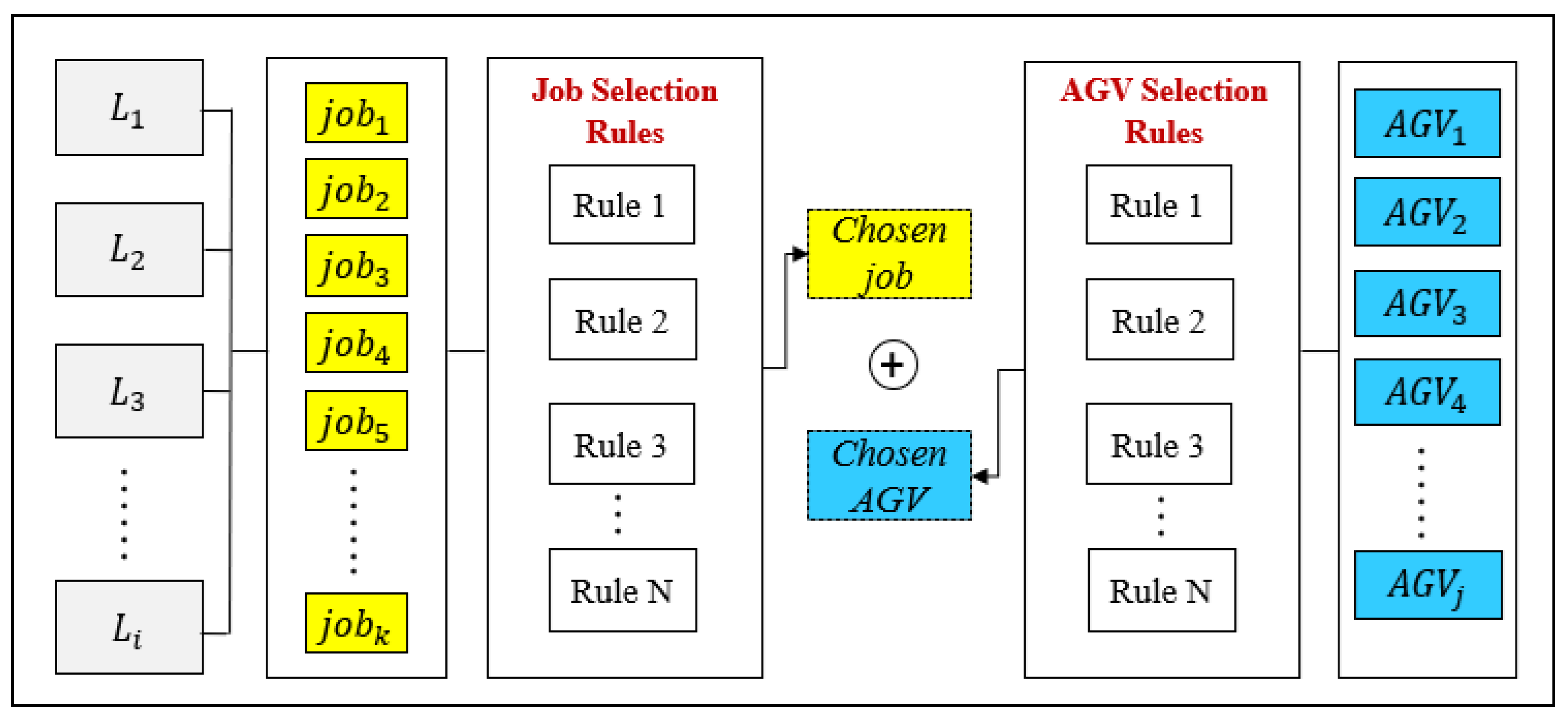
Figure 2 illustrates the overall procedure of multi-AGV scheduling in this paper, which utilizes two kinds of decision rules: the job selection rule and the AGV selection rule. Let
denote a transportation job associated with a single transportation batch to be moved from one of the production lines to an arbitrary drop-off location. The job selection rules are used to choose one of the existing transportation jobs, considering factors such as job urgency, priority, pickup location, and drop-off location. The chosen transportation job is assigned to an AGV chosen by applying AGV selection rules. In other words, AGV selection rules are used to choose one of the available AGVs, and factors such as battery level and the current location of AGVs can be considered in identifying the best AGV for a specific job. Note that an AGV is available for a new transportation job if and only if it does not satisfy any of the following sub-conditions:
Sub-condition 1 for an unavailable AGV: The AGV is carrying a previous transportation batch.
Sub-condition 2 for an unavailable AGV: The AGV is empty, and it is heading to a charging station since it satisfies the start-charge condition after unloading the previous transportation batch.
Sub-condition 3 for an unavailable AGV: The AGV is empty and staying at a charging station; however, it does not satisfy the stop-charge condition yet.
Sometimes, a transportation job must wait for an available AGV when all AGVs are unavailable, which can cause a long waiting time for the job and poor service in the multi-AGV system. Thus, job selection and AGV selection rules should be carefully designed. Examples of the job selection rules and the AGV selection rules are listed in
Table 2 and
Table 3, respectively.
4. Multi-AGV Scheduling Rules
4.1. Simulation Model for a Multi-AGV System
Simulation modeling for a multi-AGV system is a non-trivial task due to the intricate interactions and dependencies among the entities, including production lines and AGVs. Moreover, in order to apply domain-specific issues, such as limited buffer capacity and battery charging, to a simulation model, complex custom logics need to be developed. In this paper, the simulation model for a multi-AGV system is developed using the FlexSim software, which provides rich 3D visualization for manufacturing shopfloors, a built-in library for modeling AGV systems, and a flexible logic builder for developing custom logics. These advantages of the FlexSim software help to model and simulate multi-AGV systems in an efficient manner.
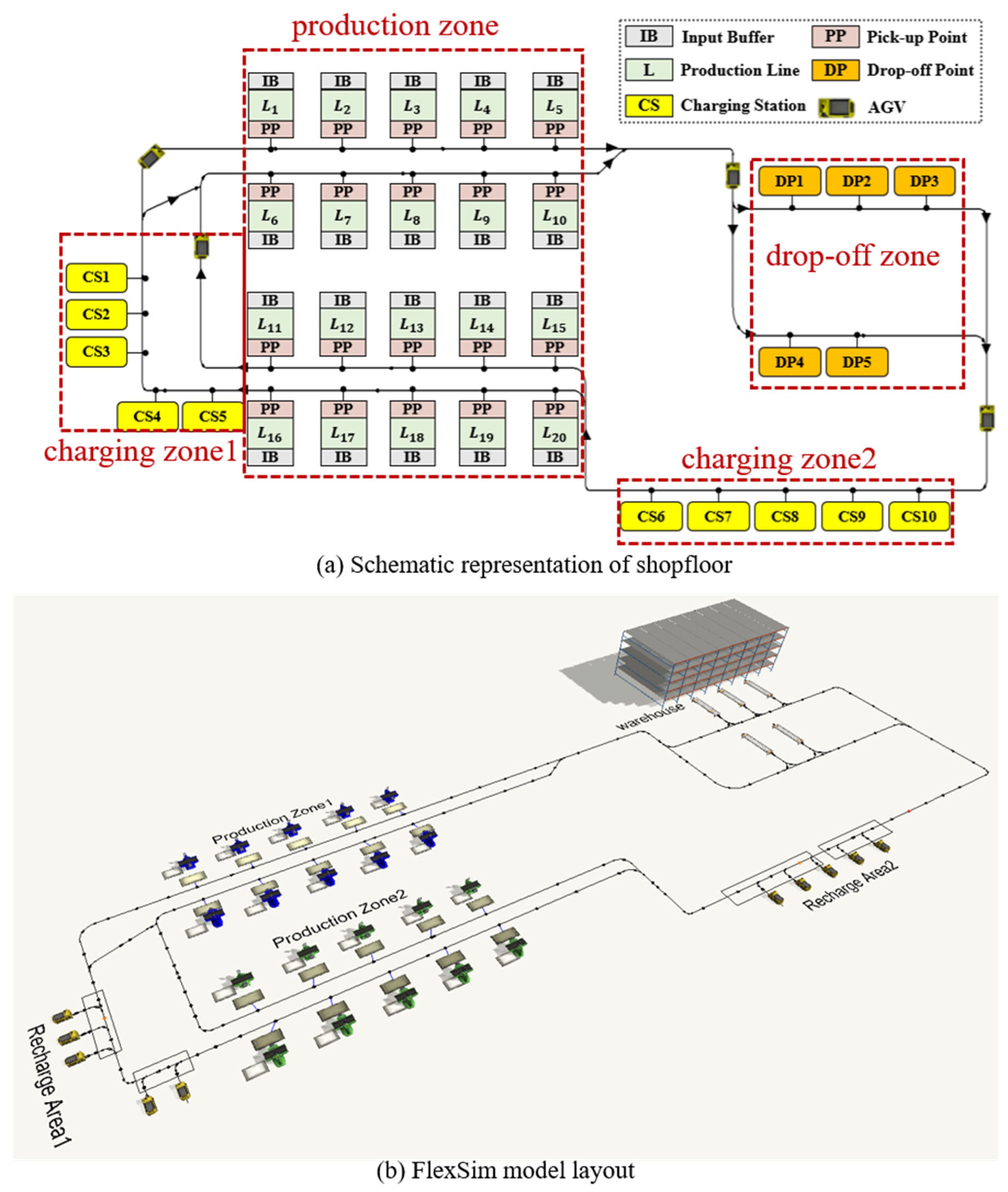
Figure 3a depicts a schematic representation of the shopfloor to be modeled, which can be divided into four zones: production zone, drop-off zone, charging zone 1, and charging zone 2. This structure for a shopfloor is motivated by an automobile part manufacturer in South Korea.
The production zone contains 20 production lines, and each production line has its own pickup point. The transportation batches at pickup points need to be transported to one of five drop-off points within the drop-off zone by AGVs. We have 10 AGVs and 10 charging stations, and every AGV stays at a charging station at time
= 0. The charging stations are grouped into two charging zones, charging zone 1 and charging zone 2, where each charging zone has five charging stations. Note that the path lines are directed, and this can affect the proximity between a production line and a charging zone. For instance, an AGV at charging zone 2 can move to
more quickly than other AGVs at charging zone 1. The drop-off zone contains five drop-off points. Moreover,
Figure 3b shows the layout of the simulation model developed using the FlexSim software.
Let denote the set of transportation jobs to be completed, the set of available AGVs, and the set of empty charging stations. During the simulation experiment, new elements can be added to these sets. For instance, a new transportation job will be added to whenever a production line produces a transportation batch. Sometimes, an existing element can be deleted from the sets. Assume that a transportation job is assigned to an AGV. Then, the AGV must be deleted from .
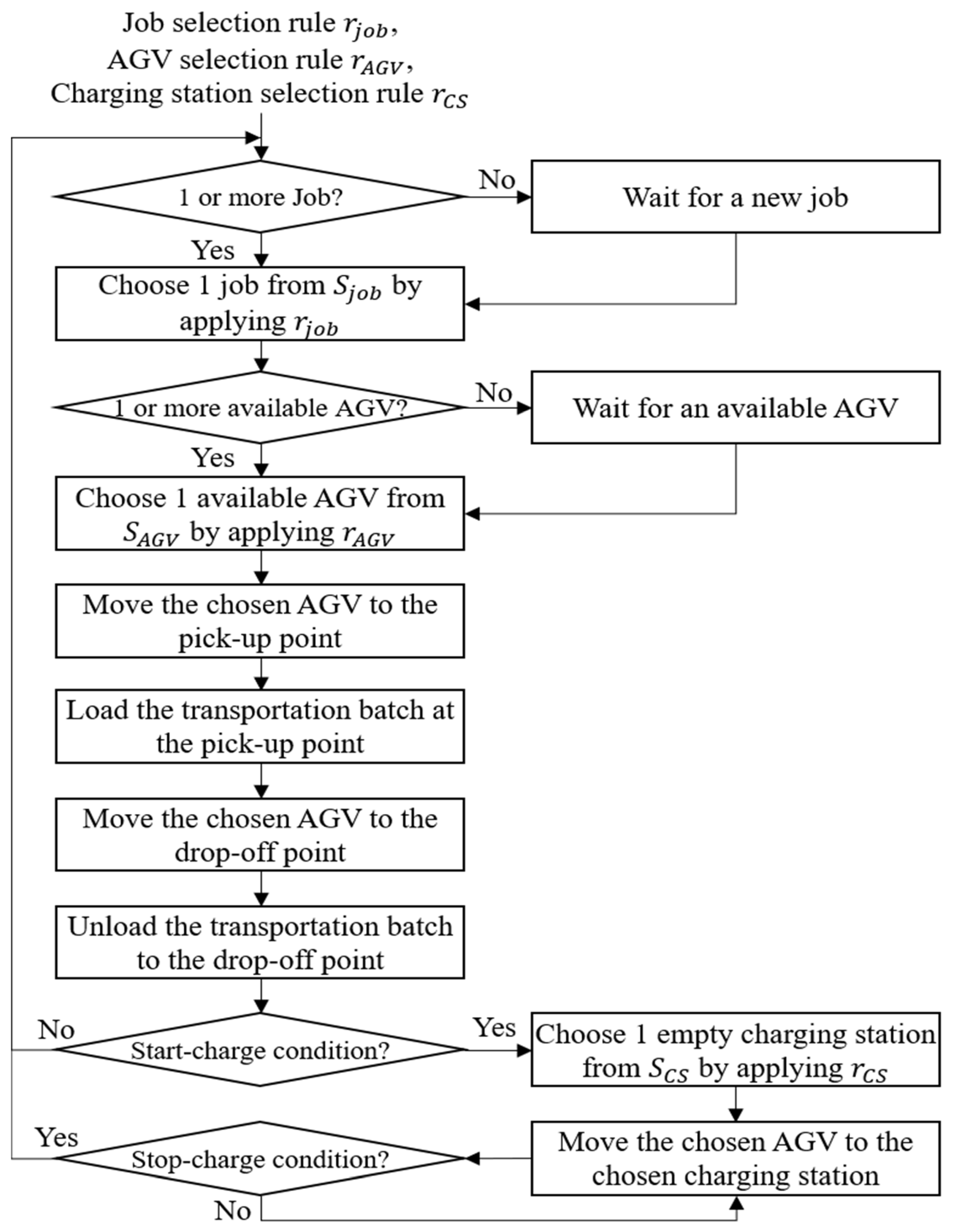
This paper proposes a multi-AGV scheduling procedure summarized in
Figure 4. The following three kinds of rules must be determined by the analyzer before the simulation experiment: the job selection rule
, the AGV selection rule
, and the charging station selection rule
. At first, a job is chosen from
by applying
. If
= 0, we have to wait until a new transportation batch is generated. After a job is chosen, an AGV is chosen from
by applying
. If there is no available AGV, we have to wait for an available one. Once an AGV is chosen, the chosen job is assigned to the AGV.
When the AGV unloads the associated transportation batch at the drop-off point, we have to check the start-charge condition before handling the next transportation job. If the condition is met, a charging station is chosen from by applying , and the AGV travels to the chosen station. An AGV staying at a charging station can perform a transportation task if and only if it satisfies the stop-charge condition. Note that the performance of the proposed multi-AGV scheduling procedure is affected by the following three kinds of rules: , , and .
In addition, the following model parameters and constraints are applied to the simulation model:
Each production line produces five types of products, and the processing time of each type can be found in
Table 4. Each type accounts for 20% of the entire product.
The raw materials arrive at the input buffer of each production line. The capacity of the input buffer is unlimited, and the inter-arrival times of raw materials are uniformly distributed between 100 and 200 (s).
The finished products are forwarded to the output buffer with limited capacity . stops operation when .
An AGV can transport only one product at a time. That is, a product is a transportation batch in the simulation model.
The detailed parameters of AGV are as follows:
Speed on the straight section of a path line: 1.8 m/s;
Speed on the curved section of a path line: 1.5 m/s;
Acceleration/deceleration: 1 m/s2;
Battery capacity: 100 (Ah);
Battery C-rate when busy (discharging): 0.25 C;
Battery C-rate when idle (discharging): 0.005 C;
Battery C-rate when charging: 0.5 C;
Pickup and drop-off time: 5 (s);
Two or more AGVs cannot occupy a single charging station at a time.
Overtaking of the AGV is not allowed.
The shopfloor is operating 24 h a day with regular break periods (12:00–13:00, 18:00–19:00). During the break period, the production lines do not operate, but AGVs can perform transportation tasks if . Consequently, s tends to be small at the end of a break period.
The simulation end time for a single experiment is 604,800 s (7 days).
4.2. Experiment Results
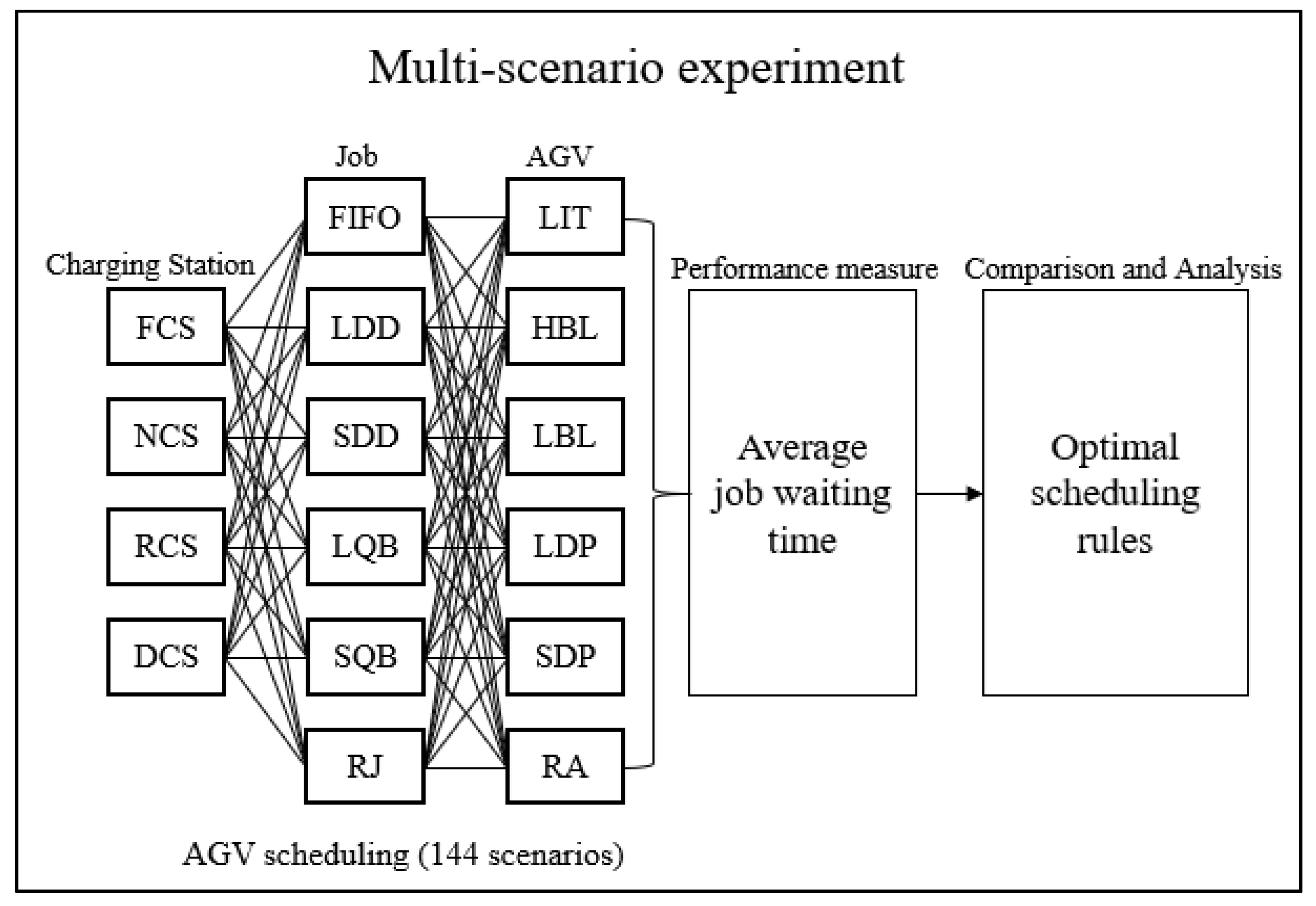
The performance of the proposed multi-AGV scheduling approach is evaluated through a multi-scenario simulation experiment, as depicted in
Figure 5. One simulation scenario is defined by combining a job selection rule, an AGV selection rule, and a charging station selection rule. Thus, we have 144 scenarios, where 10 replications of simulation experiments are conducted for each scenario. The performance measure is the average waiting time (AWT) of transportation batches, and the objective of the experiment is to find the best scenario that minimizes the AWT.
Figure 6 presents a boxplot graph, where one boxplot indicates the distribution of AWTs for a single scenario. The 144 boxplots are divided into 24 groups, where each group has six scenarios. Note that the six scenarios in a single group use identical charging station selection rules and job selection rules, while their AGV selection rules are different from each other.
From
Figure 6, we can make several observations: First, there are significant variations in the AWTs of the given scenarios, which means that the scheduling rules for a specific multi-AGV system in a practical shopfloor must be carefully chosen. For example, the second-left group containing scenario 7~scenario 12, which uses FCS and LDD, showed the best performance in terms of the AWT. The average AWT (AAWT) of those six scenarios is 1084.33 (s). In contrast, the worst group is the second-fourth one, which uses FCS and LQB, and the AAWT of this group is 1353.41 (s).
Second, the variations in the AAWT of the six scenarios in a single group are not large in that the boxplots for them are at similar heights, as can be seen in
Figure 6. Which means that the six types of AGV selection rules considered in this paper have relatively small impacts on the AWT.
Third, the charging station selection rule has relatively small impacts on the AWT, too. In
Figure 6, every six consecutive groups use the identical charging selection rule. For example, the first six groups choose the charging station by using the FCS rule. Every six consecutive groups shows similar patterns, where the second and fourth groups are the worst and the best groups, respectively. This means that the AWT is not much affected by the charging station selection rule.
Fourth, the job selection rule has significant impacts on the AWT. The six scenarios of a group use identical job selection rules, and
Figure 6 shows that the AWT of a group is highly dependent on the type of job selection rule.
The details of the AAWTs of the entire scenarios are summarized in
Appendix A, where
Table A1,
Table A2,
Table A3 and
Table A4 summarizes the performances of the six consecutive groups that use the identical charging stations rule. Note that the first columns of those tables specify the type of charging station selection rule with the AAWT of the cluster of six consecutive groups. Similarly, the second column specifies the type of job selection rule with the AAWT of the associated group in the cluster. Finally, the type of AGV selection rule and the AAWT of the associated scenario can be found in the third and fourth columns, respectively.
In order to further investigate the performances of the three kinds of AGV scheduling rules, the performances of alternatives for a specific kind of AGV scheduling rule are compared in
Figure 7,
Figure 8 and
Figure 9. For instance, 24 out of 144 scenarios use the LDD rule for job selection, and
Figure 8 shows that the AAWT of them is 1094.67 (s).
Figure 7 indicates that the AAWT value varies slightly depending on the type of charging station selection rules. Among the four alternatives, NCS (AAWT = 1213.55 (s)) and DCS (AAWT = 1217.17 (s)) are the best and worst ones; however, the difference between their performances was not large, which suggests that the charging station selection rule has limited impacts on the AWT.
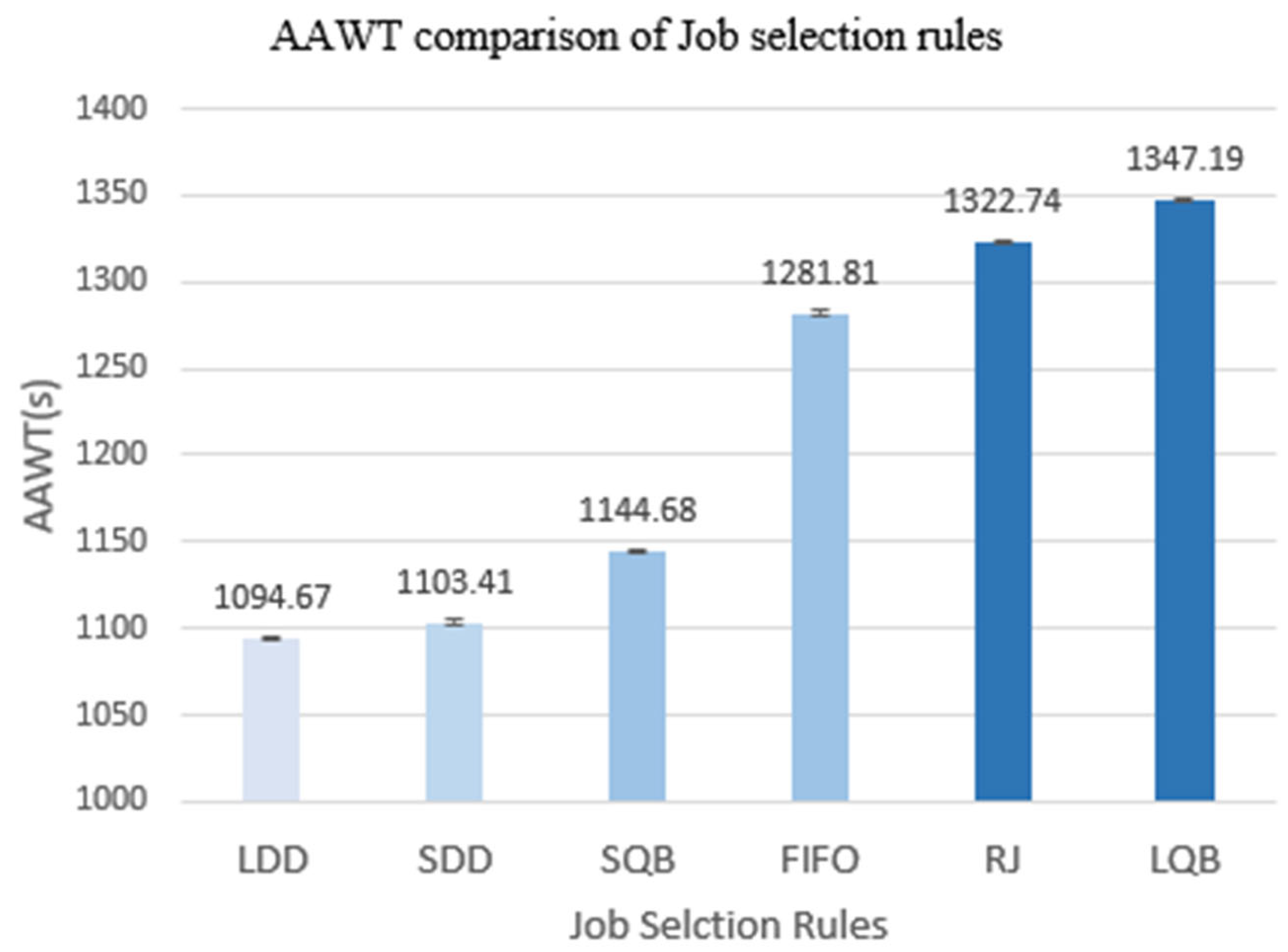
In contrast, the impact of the job selection rule is evident, as shown in
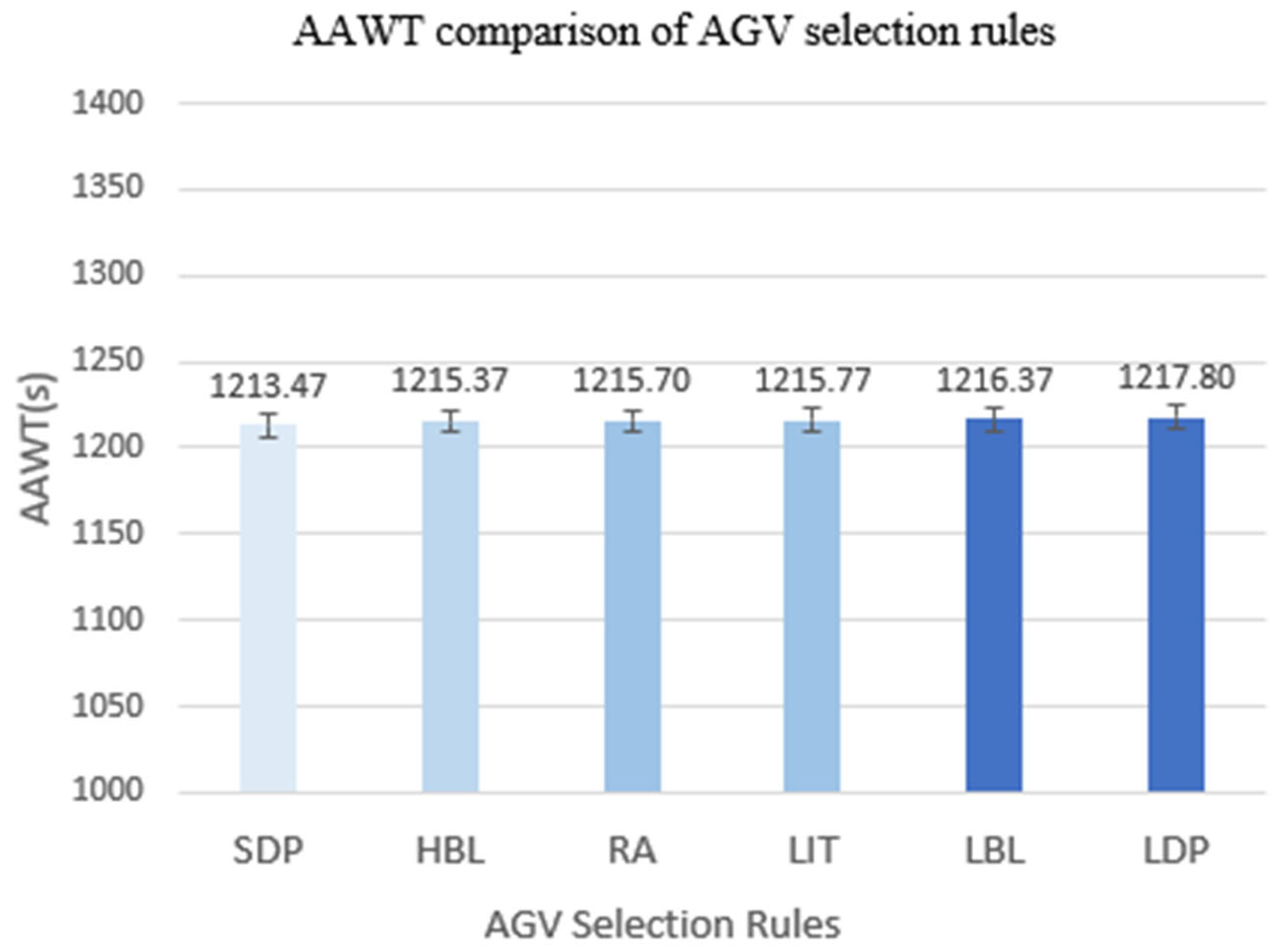
Figure 8. For example, LDD (AAWT = 1094.67 (s)) and SDD (AAWT = 1103.41 (s)) rules produce a low AWT, indicating their usefulness for reducing the AWT. On the other hand, RJ (AAWT = 1322.74 (s)) and LQB (AAWT = 1347.19 (s)) rules show poor performances. In
Figure 9, we can see that SDP (AAWT = 1213.47 (s)) and LDP (AAWT = 1217.80 (s)) are the best and worst rules for AGV selection, respectively. However, the deviation in their performances is not significant.
Note that the AAWT was minimized under charging station selection rule = FCS, job selection rule = LDD, and AGV selection rule = SDP, as shown in
Table A1. LDD is the best rule for job selection, as shown in
Figure 8. Similarly,
Figure 9 shows that SDP is the best AGV selection rule. On the contrary, FCS is not the best charging station rule, as shown in
Figure 7. This means that AGV scheduling rules must be determined by conducting a multi-scenario simulation experiment. In other words, a combination of the best rules in
Figure 7,
Figure 8 and
Figure 9 does not guarantee optimal AGV scheduling.
5. Conclusions and Further Remarks
In this paper, we propose a simulation-based AGV scheduling approach for multi-AGV systems within practical shopfloors with limited buffer capacity and battery charging. The proposed approach considers the following three kinds of scheduling rules: job selection, AGV selection, and charging station selection rules; the optimal combination of those rules can be determined through multi-scenario simulation experiments. In this paper, the scheduling approach was applied to minimize the AWT of the transportation batches. The experimental results led to several important conclusions.
First, notable variations in the AWT were observed based on the applied scheduling rule. Experimental results confirmed that applying the optimal rule set improved performance by more than 25% compared to applying the worst rule set. In other words, this means that in a multi-AGV system environment, scheduling rules must be carefully selected considering the shopfloor operating situation and requirements.
Second, it is worth noting that the choice of charging station rules and AGV selection rules had relatively small effects on the AWT compared to the impact of job selection rules. This is probably because job selection rules have a greater impact on the overall efficiency of the AGV system, whereas charging station selection rules and AGV selection rules have a relatively limited impact. This is partly inconsistent with a previous study by Le-Ahn and van der Meer (2004), which suggests that the SDP rule for AGV selection is quite helpful in reducing the AWT. Note that only the AGV selection rule was considered in the paper, while this paper combines three kinds of rules for multi-AGV scheduling. Thus, the scheduling approach proposed in this paper can make a more flexible decision about AGV scheduling. On the contrary, the experimental result of this paper is partly consistent with the previous study in that SDP is the best AGV selection rule, as shown in
Figure 9; however, its impact on the AWT is limited.
Additionally, because the charging station selection rules and AGV selection rules are mainly related to the battery status of AGVs, their impact on the AWT may be relatively small compared to the overall work efficiency of AGVs. On the other hand, job selection rules determine the job order and priority of AGVs and are therefore directly linked to the overall work efficiency, which has a greater impact on the AWT. However, this does not mean that charging station selection rules and AGV selection rules are not important. These two rules remain important factors related to battery management in AGVs and are therefore essential to maintaining the efficiency of the overall system. In the context of energy efficiency or battery-related performance metrics, the criteria for selecting AGVs or charging stations may have greater significance than the rules governing job selection.
Third, it is important to note that achieving the optimal combination of charging stations, job selection, and rules for AGV selection does not automatically ensure the most efficient AGV schedule. The average AWT of the entire scenario was recorded at 1084.33 (s), with the best outcome observed when the charging station selection rule was set to FCS, the job selection rule to LDD, and the AGV selection rule to SDP. However,
Figure 7,
Figure 8 and
Figure 9 indicate that LDD and SDP are preferable for job selection and AGV selection rules, respectively, whereas FCS is not the optimal selection. In other words, the combination of rules that seems optimal under specific conditions may not necessarily generalize well to different operational scenarios. These implications underscore the importance of an integrated approach that considers various variables and situations. In conclusion, we believe that it is desirable to evaluate the performance of AGV scheduling rules through multiple scenario experiments.
This paper will provide practical insights into AGV scheduling. However, the proposed scheduling approach has some limitations. First, the types of scheduling rules are limited in this paper. For instance, only four types of charging station rules are used to define an experiment scenario. More diverse types of job selection, AGV selection, and charging station selection rules might be useful to optimize the scheduling policy. Second, the proposed scheduling approach is static in that it does not change the types of scheduling rules during the operation of the shopfloor. The performance measure might be further improved if the types of scheduling rules can be changed dynamically.
Third, only one performance measure, the AWT, is considered in this paper, while various performance measures can be used to evaluate the performance of the AGV system. For instance, job tardiness, machine utilization, or battery charging-related measures can be more useful in some shopfloors. Fourth, this paper assumes the number of charging stations equals the number of AGVs, which might lead to little impact of charging station selection rules on the performance of the AGV system. The number of charging stations and their locations are another future research topic related to multi-AGV systems. Therefore, we plan to study a revised version of the proposed AGV scheduling approach to overcome the above limitations.
Author Contributions
Conceptualization, J.-W.K.; methodology, J.-S.P. and J.-W.K.; software, J.-S.P.; validation, J.-S.P. and J.-W.K.; formal analysis, J.-S.P. and J.-W.K.; investigation, J.-S.P.; data curation, J.-S.P. and J.-W.K.; writing—original draft preparation, J.-S.P. and J.-W.K.; writing—review and editing, J.-S.P. and J.-W.K.; visualization, J.-S.P.; supervision, J.-W.K.; project administration, J.-W.K.; funding acquisition, J.-W.K. All authors have read and agreed to the published version of the manuscript.
Funding
This work was supported by the Ministry of Education of the Republic of Korea and the National Research Foundation of Korea (NRF-2022S1A5C2A03093301).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Data is contained within the article.
Conflicts of Interest
The authors declare no conflict of interest.
Appendix A
Table A1.
AAWT under charging station selection rule = FCS (Scenario 1 to 36).
Table A1.
AAWT under charging station selection rule = FCS (Scenario 1 to 36).
| Charging Station Selection Rule | Job Selection Rule | AGV Selection Rule | AAWT (s) |
|---|
FCS
(AAWT = 1215.45) | FIFO
(AAWT = 1281.35) | LIT | 1282.26 |
| HBL | 1280.98 |
| LBL | 1283.28 |
| LDP | 1282.85 |
| SDP | 1278.29 |
| RA | 1280.46 |
LDD
(AAWT = 1084.33) | LIT | 1084.54 |
| HBL | 1084.08 |
| LBL | 1085.67 |
| LDP | 1085.59 |
| SDP | 1082.25 ** |
| RA | 1083.89 |
SDD
(AAWT = 1094.14) | LIT | 1097.5 |
| HBL | 1094.79 |
| LBL | 1094.14 |
| LDP | 1095.02 |
| SDP | 1090.61 |
| RA | 1092.78 |
LQB
(AAWT = 1353.41) | LIT | 1354.97 |
| HBL | 1352.72 |
| LBL | 1353.2 |
| LDP | 1354.65 |
| SDP | 1351.23 |
| RA | 1353.68 |
SQB
(AAWT = 1155.29) | LIT | 1152.7 |
| HBL | 1156.4 |
| LBL | 1158.9 |
| LDP | 1155.03 |
| SDP | 1151.67 |
| RA | 1157.07 |
RJ
(AAWT = 1324.19) | LIT | 1324.79 |
| HBL | 1322.71 |
| LBL | 1326.1 |
| LDP | 1325.61 |
| SDP | 1321.67 |
| RA | 1324.27 |
Table A2.
AAWT under charging station selection rule = NCS (Scenario 37 to 72).
Table A2.
AAWT under charging station selection rule = NCS (Scenario 37 to 72).
| Charging Station Selection Rule | Job Selection Rule | AGV Selection Rule | AAWT (s) |
|---|
NCS
(AAWT = 1213.55) | FIFO
(AAWT = 1276.63) | LIT | 1274.83 |
| HBL | 1277.45 |
| LBL | 1275.66 |
| LDP | 1279.02 |
| SDP | 1274.36 |
| RA | 1278.47 |
LDD
(AAWT = 1100.77) | LIT | 1101.01 |
| HBL | 1100.45 |
| LBL | 1102.16 |
| LDP | 1101.85 |
| SDP | 1098.83 * |
| RA | 1100.35 |
SDD
(AAWT = 1111.02) | LIT | 1110.09 |
| HBL | 1110.5 |
| LBL | 1109.72 |
| LDP | 1113.11 |
| SDP | 1110.25 |
| RA | 1112.42 |
LQB
(AAWT = 1336.05) | LIT | 1335.23 |
| HBL | 1339.64 |
| LBL | 1334.49 |
| LDP | 1337.42 |
| SDP | 1333.85 |
| RA | 1335.68 |
SQB
(AAWT = 1141.82) | LIT | 1142.25 |
| HBL | 1141.83 |
| LBL | 1141.41 |
| LDP | 1142 |
| SDP | 1141.04 |
| RA | 1142.39 |
RJ
(AAWT = 1315.03) | LIT | 1315.86 |
| HBL | 1316.71 |
| LBL | 1312.79 |
| LDP | 1317.7 |
| SDP | 1312.15 |
| RA | 1315 |
Table A3.
AAWT under charging station selection rule = RCS (Scenario 73 to 108).
Table A3.
AAWT under charging station selection rule = RCS (Scenario 73 to 108).
| Charging Station Selection Rule | Job Selection Rule | AGV Selection Rule | AAWT (s) |
|---|
RCS
(AAWT = 1216.81) | FIFO
(AAWT = 1284.52) | LIT | 1285.9 |
| HBL | 1281.97 |
| LBL | 1284.54 |
| LDP | 1291.06 |
| SDP | 1280.81 |
| RA | 1282.85 |
LDD
(AAWT = 1095.07) | LIT | 1095.14 |
| HBL | 1091.98 |
| LBL | 1098.28 |
| LDP | 1097.06 |
| SDP | 1091.88 * |
| RA | 1096.08 |
SDD
(AAWT = 1102.32) | LIT | 1103.01 |
| HBL | 1099.95 |
| LBL | 1104.61 |
| LDP | 1104.61 |
| SDP | 1100.54 |
| RA | 1101.21 |
LQB
(AAWT = 1350.57) | LIT | 1350.38 |
| HBL | 1350.55 |
| LBL | 1348.05 |
| LDP | 1354.05 |
| SDP | 1349.19 |
| RA | 1351.21 |
SQB
(AAWT = 1141.9) | LIT | 1138.23 |
| HBL | 1142.93 |
| LBL | 1144.14 |
| LDP | 1143.89 |
| SDP | 1140.33 |
| RA | 1141.87 |
RJ
(AAWT = 1326.48) | LIT | 1325.91 |
| HBL | 1326.82 |
| LBL | 1325.59 |
| LDP | 1329.13 |
| SDP | 1324.97 |
| RA | 1326.44 |
Table A4.
AAWT under charging station selection rule = DCS (Scenario 109 to 144).
Table A4.
AAWT under charging station selection rule = DCS (Scenario 109 to 144).
| Charging Station Selection Rule | Job Selection Rule | AGV Selection Rule | AAWT (s) |
|---|
DCS
(AAWT = 1217.17) | FIFO
(AAWT = 1284.72) | FCFS | 1285.22 |
| HBL | 1282.27 |
| LBL | 1288.19 |
| LDP | 1288.44 |
| SDP | 1281.38 |
| RA | 1282.79 |
LDD
(AAWT = 1098.51) | FCFS | 1097.55 |
| HBL | 1096.26 * |
| LBL | 1100.23 |
| LDP | 1101.09 |
| SDP | 1097.22 |
| RA | 1098.69 |
SDD
(AAWT = 1106.14) | LIT | 1105.79 |
| HBL | 1104.38 |
| LBL | 1108.5 |
| LDP | 1107.99 |
| SDP | 1103.88 |
| RA | 1106.3 |
LQB
(AAWT = 1348.71) | LIT | 1349.45 |
| HRB | 1349.37 |
| LRB | 1348.22 |
| FPL | 1350.18 |
| SPL | 1346.47 |
| RAS | 1348.56 |
SQB
(AAWT = 1139.71) | LIT | 1140.2 |
| HRB | 1139.73 |
| LRB | 1139.68 |
| FPL | 1141.71 |
| SPL | 1136.98 |
| RAS | 1139.92 |
RJ
(AAWT = 1325.27) | LIT | 1325.66 |
| HRB | 1324.47 |
| LRB | 1325.31 |
| FPL | 1328.2 |
| SPL | 1323.51 |
| RAS | 1324.46 |
References
- Mehrabian, A.; Tavakkoli-Moghaddam, R.; Khalili-Damaghani, K. Multi-objective routing and scheduling in flexible manufacturing systems under uncertainty. Iran. J. Fuzzy Syst. 2017, 14, 45–77. [Google Scholar]
- Witczak, M.; Majdzik, P.; Stetter, R.; Lipiec, B. Multiple AGV fault-tolerant within an agile manufacturing warehouse. IFAC-PapersOnLine 2019, 52, 1914–1919. [Google Scholar] [CrossRef]
- Zhang, X.J.; Sang, H.Y.; Li, J.Q.; Han, Y.Y.; Duan, P. An effective multi-AGVs dispatching method applied to matrix manufacturing workshop. Comput. Ind. Eng. 2022, 163, 107791. [Google Scholar] [CrossRef]
- Okumuş, F.; Dönmez, E.; Kocamaz, A.F. A cloudware architecture for collaboration of multiple agvs in indoor logistics: Case study in fabric manufacturing enterprises. Electronics 2020, 9, 2023. [Google Scholar] [CrossRef]
- Zając, J.; Małopolski, W. Structural on-line control policy for collision and deadlock resolution in multi-AGV systems. J. Manuf. Syst. 2021, 60, 80–92. [Google Scholar] [CrossRef]
- Draganjac, I.; Miklić, D.; Kovačić, Z.; Vasiljević, G.; Bogdan, S. Decentralized control of multi-AGV systems in autonomous warehousing applications. IEEE Trans. Autom. Sci. Eng. 2016, 13, 1433–1447. [Google Scholar] [CrossRef]
- Zacharia, P.T.; Xidias, E.K. AGV routing and motion planning in a flexible manufacturing system using a fuzzy-based genetic algorithm. Int. J. Adv. Manuf. Technol. 2020, 109, 1801–1813. [Google Scholar] [CrossRef]
- Vlachos, I.; Pascazzi, R.M.; Ntotis, M.; Spanaki, K.; Despoudi, S.; Repoussis, P. Smart and flexible manufacturing systems using Autonomous Guided Vehicles (AGVs) and the Internet of Things (IoT). Int. J. Prod. Res. 2022, 2022, 2136282. [Google Scholar] [CrossRef]
- Jin, J.; Zhang, X.H. Multi agv scheduling problem in automated container terminal. J. Mar. Sci. Technol. 2016, 24, 5. [Google Scholar]
- Fazlollahtabar, H.; Hassanli, S. Hybrid cost and time path planning for multiple autonomous guided vehicles. Appl. Intell. 2018, 48, 482–498. [Google Scholar] [CrossRef]
- Małopolski, W. A sustainable and conflict-free operation of AGVs in a square topology. Comput. Ind. Eng. 2018, 126, 472–481. [Google Scholar] [CrossRef]
- Zou, W.Q.; Pan, Q.K.; Meng, T.; Gao, L.; Wang, Y.L. An effective discrete artificial bee colony algorithm for multi-AGVs dispatching problem in a matrix manufacturing workshop. Expert Syst. Appl. 2020, 161, 113675. [Google Scholar] [CrossRef]
- Dang, Q.V.; Singh, N.; Adan, I.; Martagan, T.; van de Sande, D. Scheduling heterogeneous multi-load AGVs with battery constraints. Comput. Oper. Res. 2021, 136, 105517. [Google Scholar] [CrossRef]
- Liu, C.I.; Ioannou, P.A. A comparison of different AGV dispatching rules in an automated container terminal. In Proceedings of the IEEE 5th International Conference on Intelligent Transportation Systems, Singapore, 6 September 2002; pp. 880–885. [Google Scholar]
- Koo, P.H.; Jang, J. Vehicle travel time models for AGV systems under various dispatching rules. Int. J. Flex. Manuf. Syst. 2002, 14, 249–261. [Google Scholar] [CrossRef]
- Ho, Y.C.; Liu, H.C. A simulation study on the performance of pickup-dispatching rules for multiple-load AGVs. Comput. Ind. Eng. 2006, 51, 445–463. [Google Scholar] [CrossRef]
- de Koster, R.M.B.; Le-Anh, T.; van der Meer, J.R. Testing and classifying vehicle dispatching rules in three real-world settings. J. Oper. Manag. 2004, 22, 369–386. [Google Scholar] [CrossRef]
- Le-Anh, T.; De Koster, M.B.M. A review of design and control of automated guided vehicle systems. Eur. J. Oper. Res. 2006, 171, 1–23. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Y. An Ant Colony Optimization-Simulated Annealing Algorithm for Solving a Multiload AGVs Workshop Scheduling Problem with Limited Buffer Capacity. Processes 2023, 11, 861. [Google Scholar] [CrossRef]
- Wang, Z.; Hu, J.; Wu, Y.; Wang, Y. Improved Simulated Annealing Algorithm for Scheduling of Multi-load AGV Workshop with Limited Buffer Capacity. In Proceedings of the 2022 4th International Academic Exchange Conference on Science and Technology Innovation (IAECST), Guangzhou, China, 9–11 December 2022; pp. 1509–1515. [Google Scholar]
- Naeem, D.; Eltawil, A.; Iijima, J.; Gheith, M. Integrated Scheduling of Automated Yard Cranes and Automated Guided Vehicles with Limited Buffer Capacity of Dual-Trolley Quay Cranes in Automated Container Terminals. Logistics 2022, 6, 82. [Google Scholar] [CrossRef]
- Li, J.; Cheng, W.; Lai, K.K.; Ram, B. Multi-AGV Flexible Manufacturing Cell Scheduling Considering Charging. Mathematics 2022, 10, 3417. [Google Scholar] [CrossRef]
- Yang, X.; Hu, H.; Cheng, C.; Wang, Y. Automated Guided Vehicle (AGV) Scheduling in Automated Container Terminals (ACTs) Focusing on Battery Swapping and Speed Control. J. Mar. Sci. Eng. 2023, 11, 1852. [Google Scholar] [CrossRef]
- Sun, B.; Zhai, G.; Li, S.; Pei, B. Multi-resource collaborative scheduling problem of automated terminal considering the AGV charging effect under COVID-19. Ocean Coast. Manag. 2023, 232, 106422. [Google Scholar] [CrossRef] [PubMed]
- Singh, N.; Dang, Q.V.; Akcay, A.; Adan, I.; Martagan, T. A matheuristic for AGV scheduling with battery constraints. Eur. J. Oper. Res. 2022, 298, 855–873. [Google Scholar] [CrossRef]
- Abderrahim, M.; Bekrar, A.; Trentesaux, D.; Aissani, N.; Bouamrane, K. Manufacturing 4.0 operations scheduling with AGV battery management constraints. Energies 2020, 13, 4948. [Google Scholar]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}