
Research on Risk Quantification Methods for Connected Autonomous Vehicles Based on CNN-LSTM

Abstract
1. Introduction
2. Car-Following Model for CAVs Based on Molecular Force Fields
2.1. System Similarity Analysis
2.2. Car-Following Model for CAVs
3. CAV Trajectory Prediction
3.1. CNN
3.2. LSTM Network
3.3. Trajectory Prediction Model
4. CAV Driving Risk Quantification Model
4.1. Time-to-Collision Adjustment
4.2. Collision Probability
4.3. Collision Severity
5. Experimental Validation and Analysis
5.1. Data Preprocessing
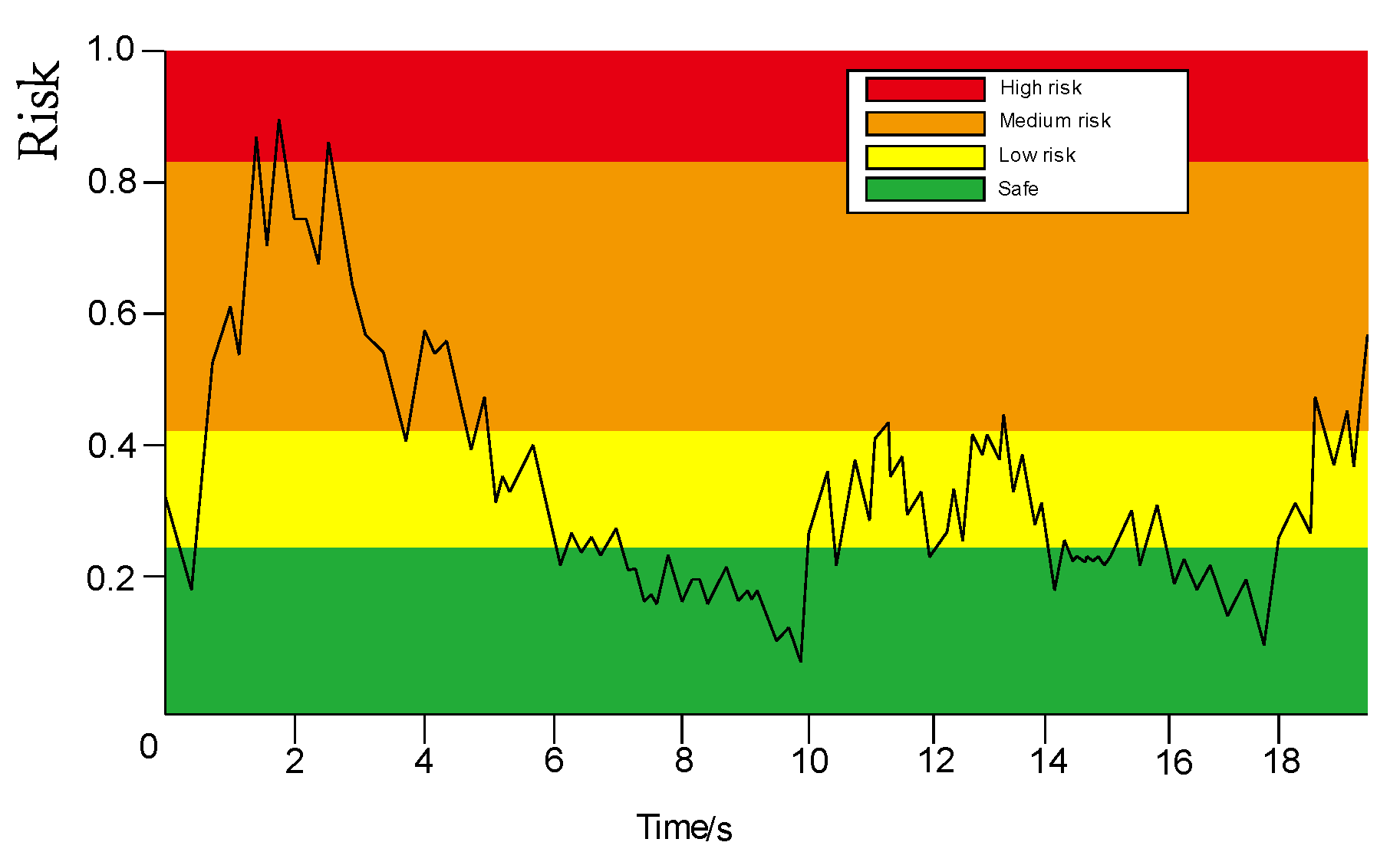
5.2. Risk Level Classification
5.3. CNN-LSTM Trajectory Prediction Model Evaluation
5.4. Risk Prediction Result Analysis
6. Conclusions and Outlook
- (1)
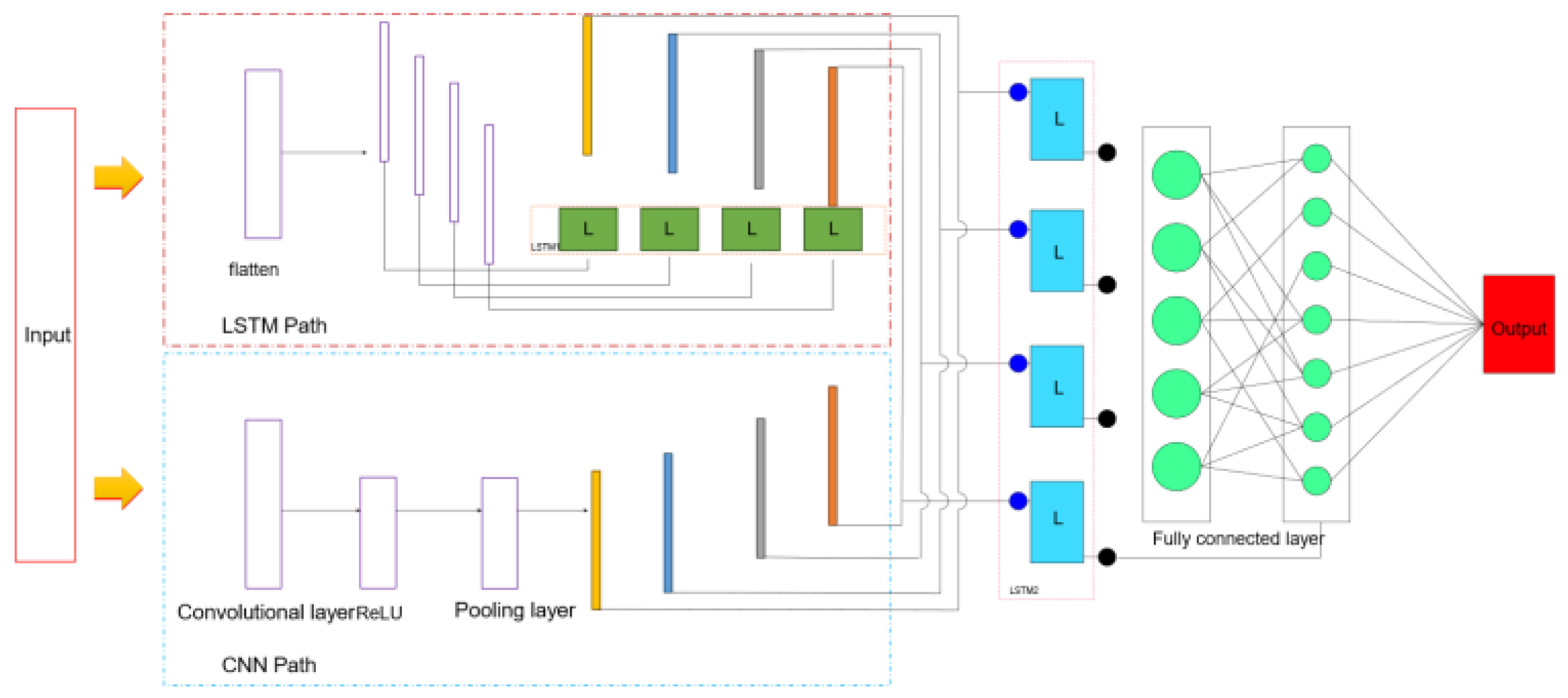
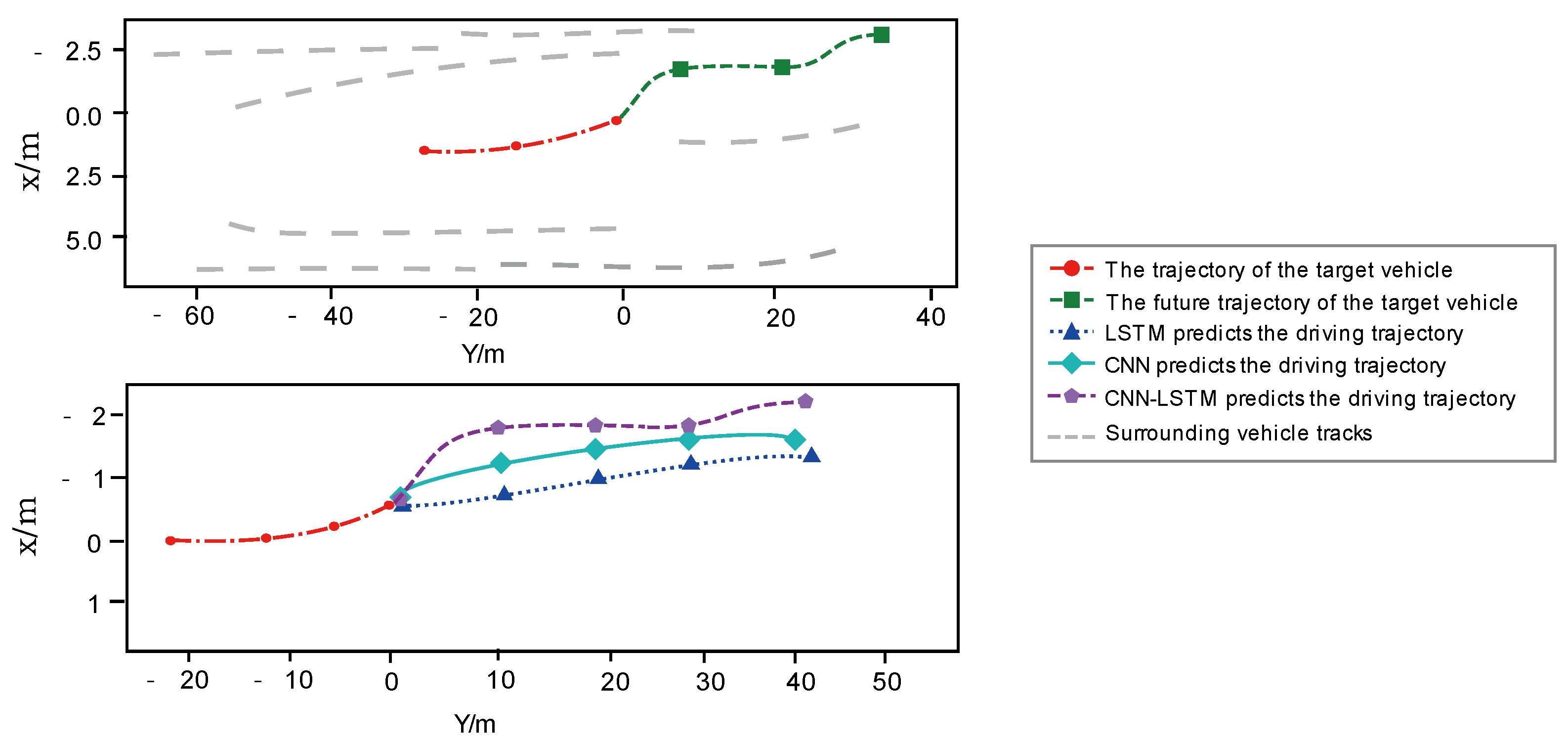
- This study proposes an innovative CNN-LSTM deep-learning model that effectively predicts the future driving trajectories of target vehicles by integrating the characteristics of the CNN and LSTM. The model not only considers the dynamic interactions between vehicles but also incorporates multiple risk factors, such as the collision probability and severity, forming a comprehensive system for risk quantification and classification. By precisely categorizing different levels of risk, this model offers more accurate guidance for traffic management and safety interventions, contributing to a safer environment for autonomous driving.
- (2)
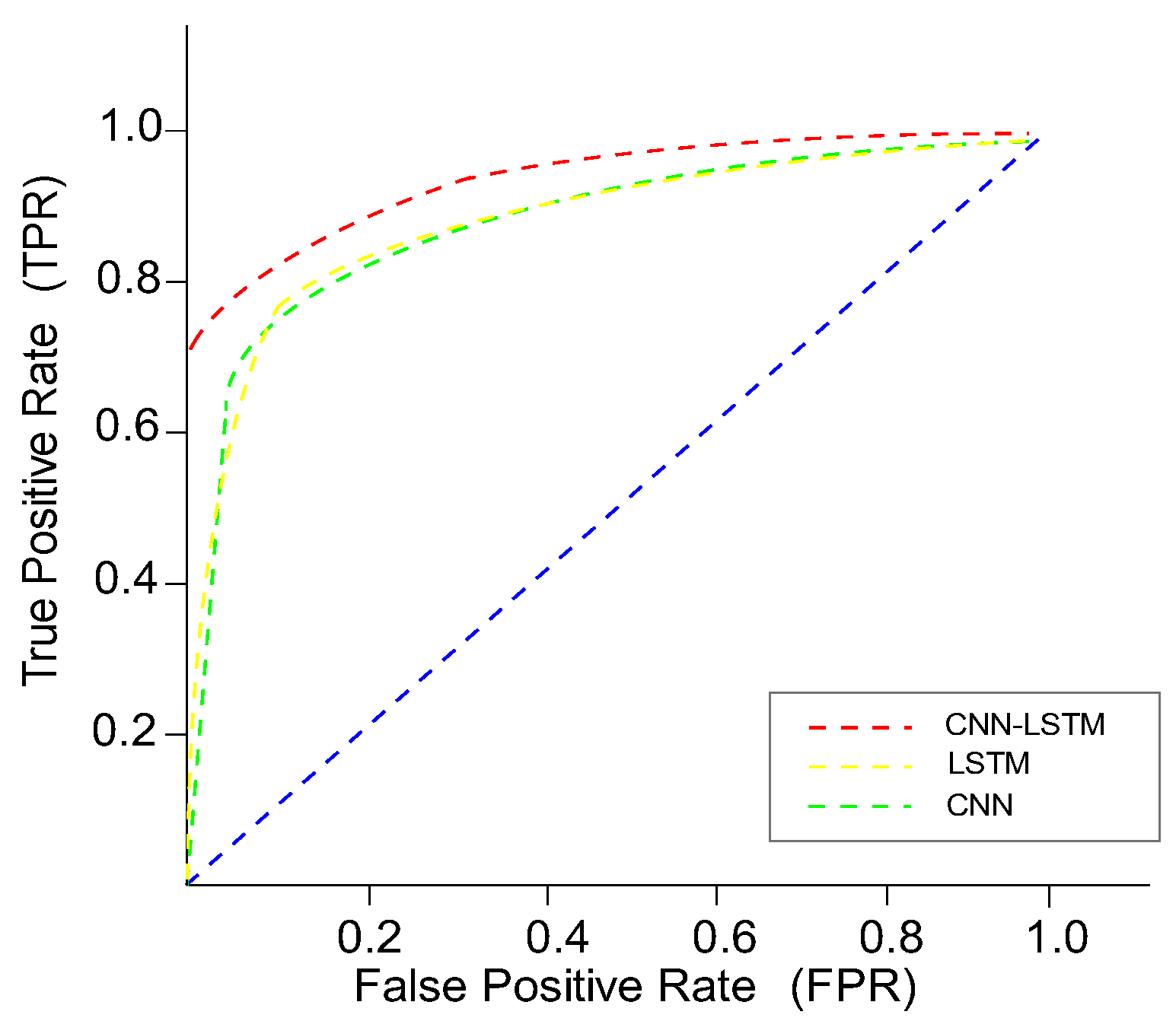
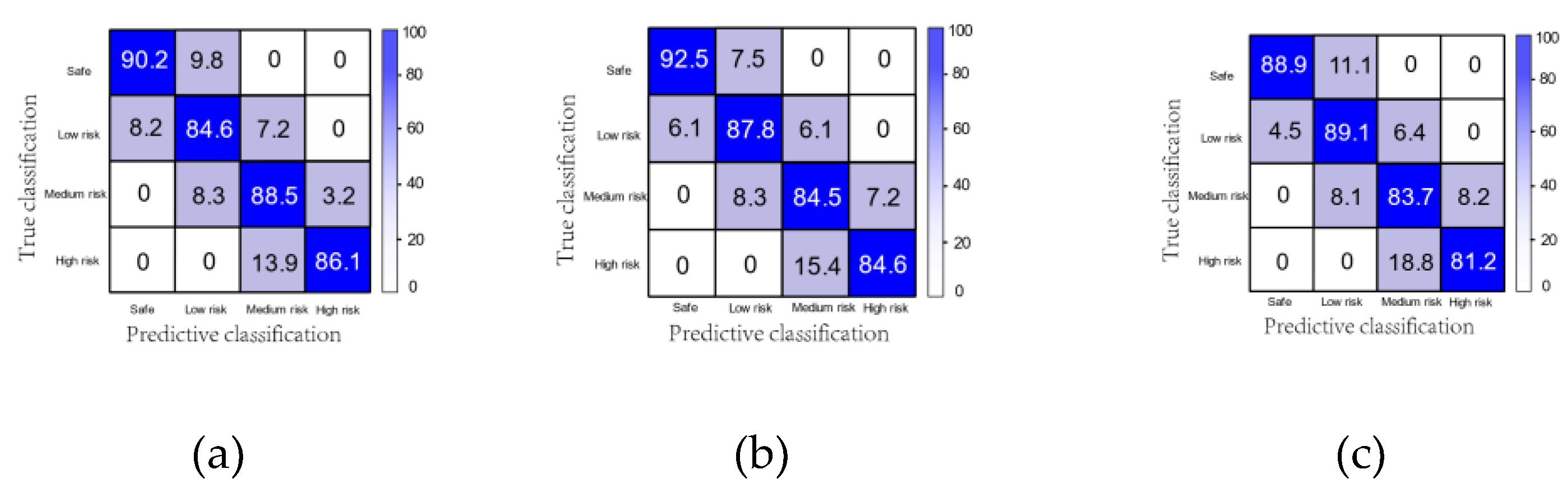
- The study utilizes the High-D dataset, which provides extensive real-world traffic scene data. Leveraging this dataset, the model accurately derives the target vehicle’s speed and acceleration based on the displacement and time changes between points along the predicted trajectory. This dynamic predictive capability enhances the model’s sensitivity to potential risks, achieving prediction accuracies exceeding 86% for moderate- to high-risk scenarios. Such a high accuracy and effectiveness offer crucial support for the safe operation of connected autonomous vehicles in complex traffic environments, while also improving the scientific rigor and reliability of overall traffic safety management.
- (3)
- There are still some limitations in the current study. In the future, the model will be expanded to incorporate references to hybrid integrated models in autonomous driving environments. Additionally, the effectiveness of the model in more complex traffic conditions, its applicability to other datasets, and its performance in environments such as highways will be explored to further enhance the driving safety of connected autonomous vehicles.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kim, J.H.; Kum, D.S. Threat prediction algorithm based on local path candidates and surrounding vehicle trajectory predictions for automated driving vehicles. In Proceedings of the 2015 IEEE Intelligent Vehicles Symposium (IV), Seoul, Republic of Korea, 28 June–1 July 2015; pp. 1220–1225. [Google Scholar] [CrossRef]
- Noh, S. Decision-making framework for autonomous driving at road intersections: Safeguarding against collision, overly conservative behavior, and violation vehicles. IEEE Trans. Ind. Electron. 2018, 66, 3275–3286. [Google Scholar] [CrossRef]
- Li, G.; Yang, Y.; Zhang, T.; Qu, X.; Cao, D.; Cheng, B.; Li, K. Risk assessment based collision avoidance decision-making for autonomous vehicles in multi-scenarios. Transp. Res. Part C Emerg. Technol. 2021, 122, 102820. [Google Scholar] [CrossRef]
- Zheng, X.; Jiang, J.; Huang, H.; Wang, J.; Xu, Q.; Zhang, Q. Novel quantitative approach for assessing driving risks and simulation study of its prevention and control strategies. J. Mech. Eng. 2024, 60, 207–221. [Google Scholar]
- Xu, P.; Ruan, W.; Huang, X. Towards the quantification of safety risks in deep neural networks. arXiv 2020, arXiv:2009.06114. [Google Scholar]
- Wang, C.; Liu, L.; Xu, C.; Lv, W. Predicting future driving risk of crash-involved drivers based on a systematic machine learning framework. Int. J. Environ. Res. Public Health 2019, 16, 334. [Google Scholar] [CrossRef] [PubMed]
- Moon, S.; Koo, S.; Lim, Y.; Joo, H. Routing control optimization for autonomous vehicles in mixed traffic flow based on deep reinforcement learning. Appl. Sci. 2024, 14, 2214. [Google Scholar] [CrossRef]
- Kong, D.; Wang, M.; Zhang, K.; Sun, L.; Wang, Q.; Zhang, X. Exploring HDV Driver-CAV interaction in mixed traffic: A Two-Step method integrating latent profile analysis and multinomial logit model. Appl. Sci. 2024, 14, 1768. [Google Scholar] [CrossRef]
- Qu, D.; Meng, Y.; Wang, T.; Song, H.; Chen, Y. Car-following model and safety characteristics of connected autonomous vehicles based on molecular force field. J. Transp. Syst. Eng. Inf. Technol. 2023, 23, 33–41. [Google Scholar]
- Johnsson, C.; Laureshyn, A.; De Ceunynck, T. In search of surrogate safety indicators for vulnerable road users: A review of surrogate safety indicators. Transp. Rev. 2018, 38, 765–785. [Google Scholar] [CrossRef]
- Vogel, K. A comparison of headway and time to collision as safety indicators. Accid. Anal. Prev. 2023, 35, 427–433. [Google Scholar] [CrossRef] [PubMed]
- Ozbay, K.; Yang, H.; Bartin, B.; Mudigonda, S. Derivation and validation of new simulation-based surrogate safety measure. Transp. Res. Rec. 2008, 2083, 105–113. [Google Scholar] [CrossRef]
- Yang, H. Simulation-Based Evaluation of Traffic Safety Performance Using Surrogate Safety Measures. Ph.D. Thesis, Rutgers The State University of New Jersey, School of Graduate Studies, New Brunswick, NJ, USA, 2012. [Google Scholar]
- Mahajan, V.; Katrakazas, C.; Antoniou, C. Crash risk estimation due to lane changing: A data-driven approach using naturalistic data. IEEE Trans. Intell. Transp. Syst. 2020, 23, 3756–3765. [Google Scholar] [CrossRef]
- Rosen, E.; Stigson, H.; Sander, U. Literature review of pedestrian fatality risk as a function of car impact speed. Accid. Anal. Prev. 2011, 43, 25–33. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Risk Level Classification | Threshold |
|---|---|
| High risk | |
| Medium risk | |
| Low risk | |
| Safe |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Qu, D.; Shao, D.; Wei, L.; Zhang, Z. Research on Risk Quantification Methods for Connected Autonomous Vehicles Based on CNN-LSTM. Appl. Sci. 2024, 14, 11204. https://doi.org/10.3390/app142311204
Wang K, Qu D, Shao D, Wei L, Zhang Z. Research on Risk Quantification Methods for Connected Autonomous Vehicles Based on CNN-LSTM. Applied Sciences. 2024; 14(23):11204. https://doi.org/10.3390/app142311204
Chicago/Turabian StyleWang, Kedong, Dayi Qu, Dedong Shao, Liangshuai Wei, and Zhi Zhang. 2024. "Research on Risk Quantification Methods for Connected Autonomous Vehicles Based on CNN-LSTM" Applied Sciences 14, no. 23: 11204. https://doi.org/10.3390/app142311204
APA StyleWang, K., Qu, D., Shao, D., Wei, L., & Zhang, Z. (2024). Research on Risk Quantification Methods for Connected Autonomous Vehicles Based on CNN-LSTM. Applied Sciences, 14(23), 11204. https://doi.org/10.3390/app142311204