

Automatizing Automatic Controller Design Process: Designing Robust Automatic Controller under High-Amplitude Disturbances Using Particle Swarm Optimized Neural Network Controller


Abstract
Featured Application
Abstract
1. Introduction
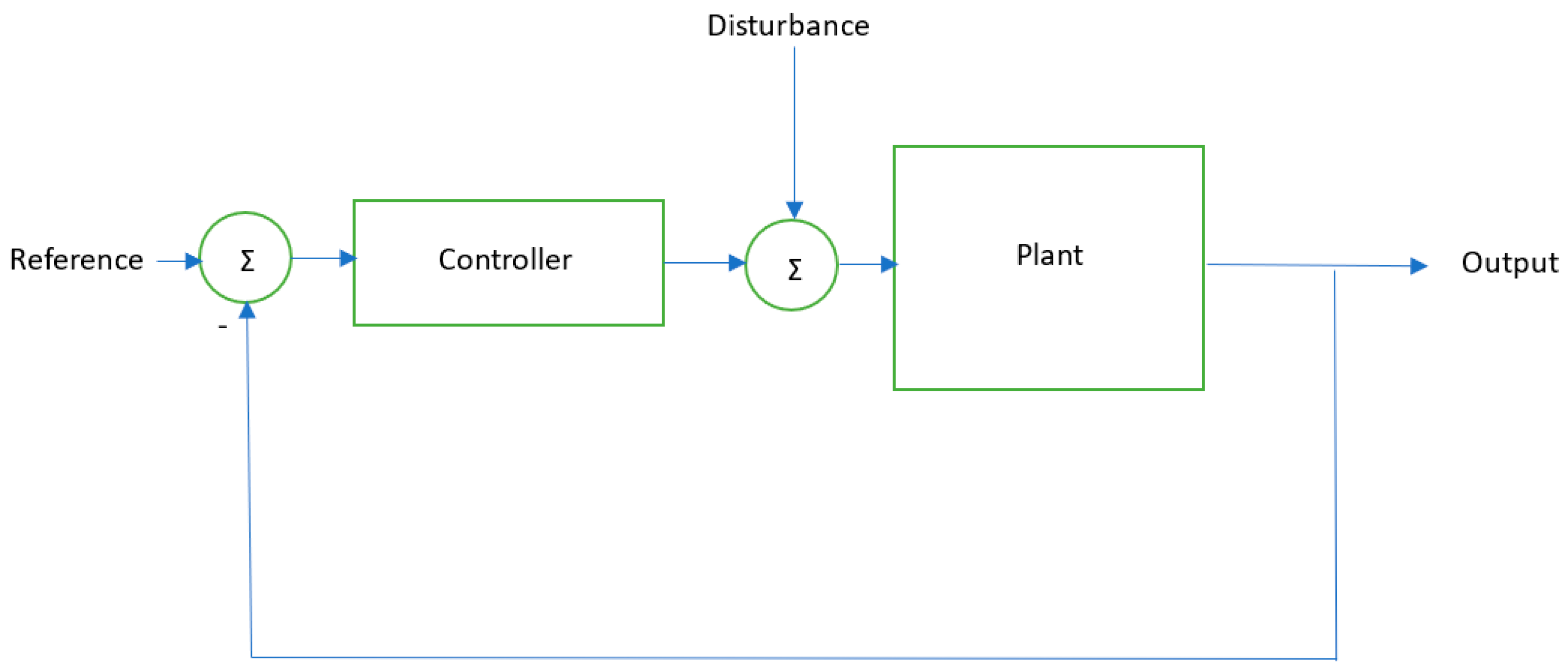
1.1. Automatic Control Concepts
1.2. Intelligent Control Systems
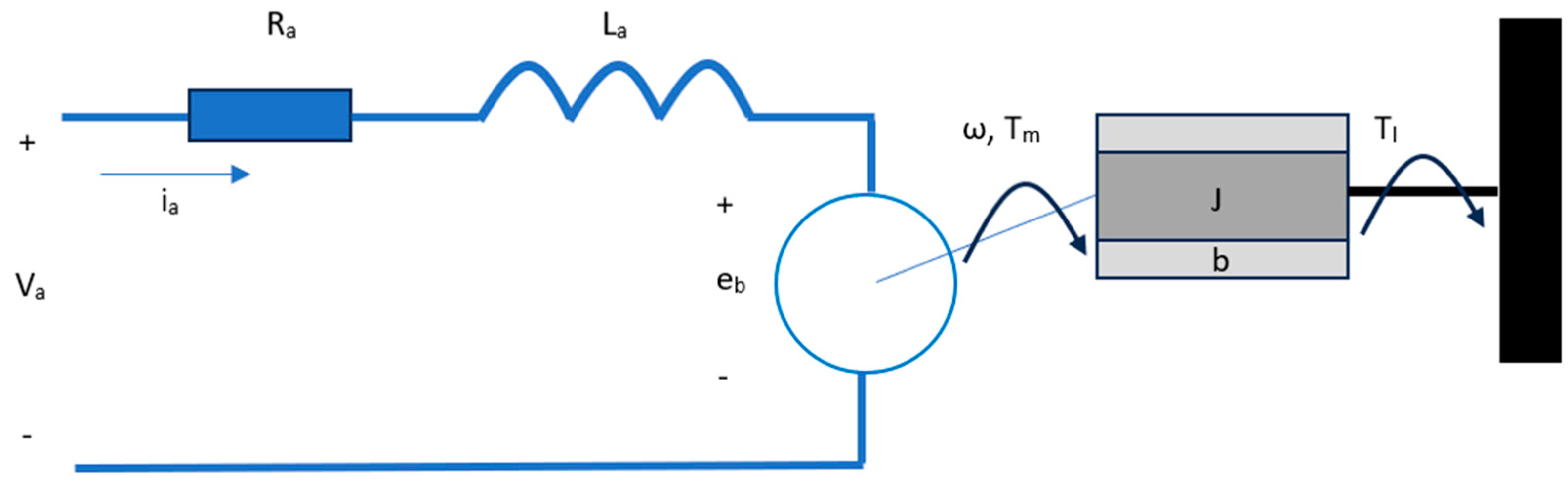
1.3. DC Motor Control
2. Materials and Methods
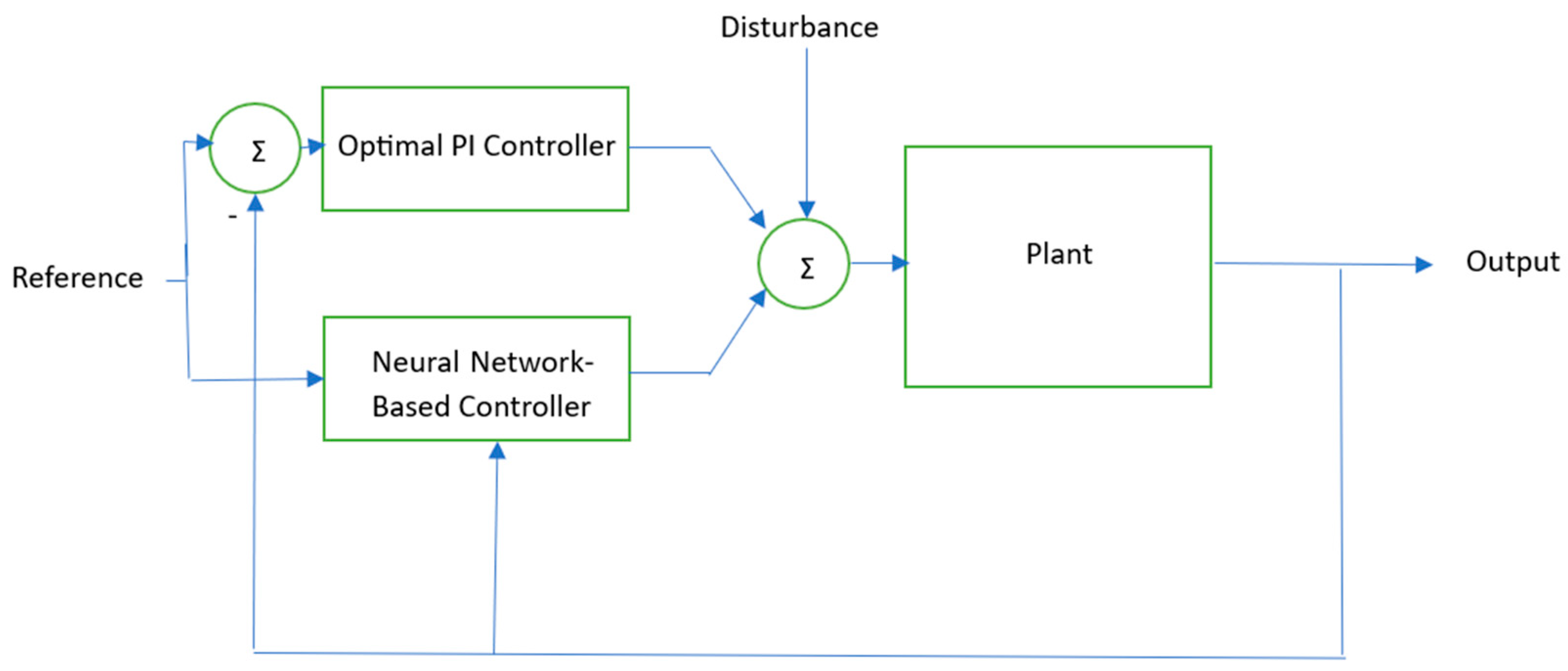
2.1. Proposed System
- (1)
- Choose limits of controller output;
- (2)
- Design an optimal PI controller using the PSO algorithm;
- (3)
- For fine-tuning, design a neural network controller with the PSO algorithm.
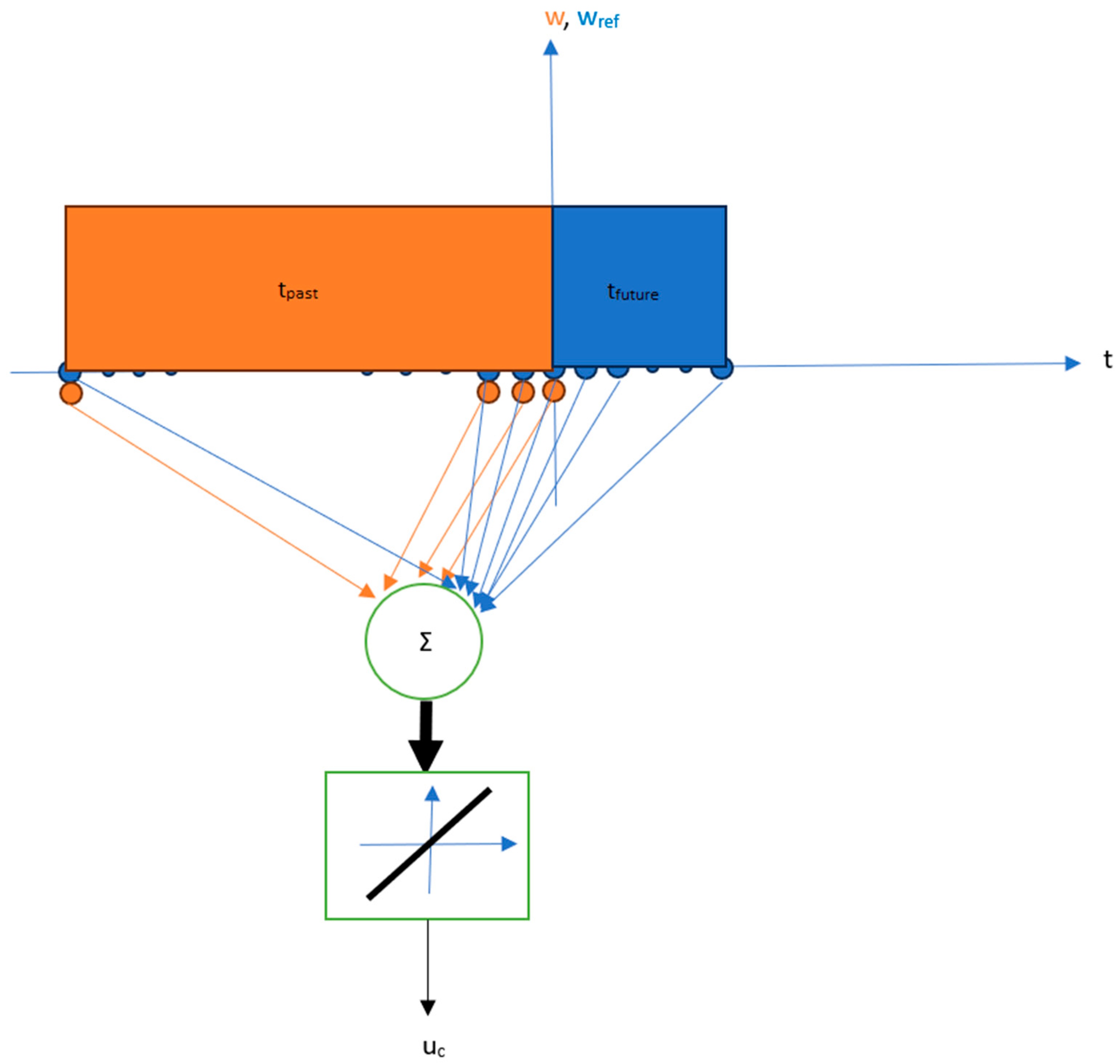
2.2. Past and Future Windows
2.3. Training Neural Networks with PSO
2.4. Discretization and Implementation of System
3. Results
| g (optimal neural weight vector) = [[ −2.00956934 × 10−2, 2.28251818 × 10−2, 3.66802550 × 10−3, 4.68787594 × 10−3, 1.10714396 × 10−2, −1.25274995 × 10−3, −1.10151555 × 10−2, 7.51440490 × 10−2, −1.35266461 × 10−2, −2.01238715 × 10−2, 5.46645054 × 10−2, −6.47748694 × 10−3, 2.40590535 × 10−2, 1.97057222 × 10−2, 5.17743275 × 10−2, 1.81642138 × 10−2, 4.33055085 × 10−2, 1.74264836 × 10−2, −4.58121589 × 10−3, 1.42641135 × 10−2, −5.47776784 × 10−4, −1.76951475 × 10−3, 1.28168151 × 10−2, 2.82062853 × 10−2, −1.77549715 × 10−3, 1.81045855 × 10−2, 5.28164547 × 10−2, 2.44388379 × 10−2, −2.53992993 × 10−2, 2.23594722 × 10−5, −2.43687957 × 10−2, −7.82207853 × 10−2, −1.04065066 × 10−2, −1.26254889 × 10−1, 3.25520224 × 10−3, 1.74701081 × 10−2, −4.47201247 × 10−3, 1.54930364 × 10−3, −2.17759436 × 10−2, 1.09310672 × 10−1, 1.88470285 × 10−1, 1.53151263 × 10−1, 2.12573135 × 10−1, 5.96647710 × 10−2, −6.36103418 × 10−3, −1.65250932 × 10−3, 4.89734504 × 10−2, −4.26310941 × 10−3, 1.64341826 × 10−3, −5.74545106 × 10−5, −6.14562688 × 10−1, −8.89053434 × 10−3, −8.76923913 × 10−4, 2.78282565 × 10−2, −7.14593811 × 10−2, 2.30802202 × 10−2, 4.75389489 × 10−2, 3.08541814 × 10−3, −1.33222498 × 10−3, 4.06371354 × 10−3, −4.34424866 × 10−2, 9.25887701 × 10−2, −1.17017702 × 10−3, −3.28774384 × 10−2, 5.91127735 × 10−3, −6.76456032 × 10−2, 3.54275769 × 10−3, −2.80618073 × 10−2, −8.29980821 × 10−2, −4.68078831 × 10−2, −7.70450798 × 10−3, −5.71033232 × 10−4, −1.97019313 × 10−1, 4.10303154 × 10−3, 5.82616963 × 10−5, −9.41320891 × 10−3, 1.49802579 × 10−1, 3.78894107 × 10−3, −5.41212802 × 10−1, −2.03641023 × 10−1, 6.36523382 × 10−4, −4.50341962 × 10−2, −3.60406881 × 10−1, −3.54286361 × 10−2, −1.45335544 × 10−2, −8.99566061 × 10−2, 1.89285696 × 10−1, 2.08332606 × 10−1, −5.91208362 × 10−3, 2.05832348 × 10−2, −2.71000803 × 10−2, 1.92909940 × 10−2, 9.39732840 × 10−1, −4.22809155 × 10−2, −1.97117429 × 10−2, −2.09135482 × 10−2, −1.09053803 × 10−2, 1.60087125 × 10−3, −1.12127972 × 10−2, 1.26364099 × 10−1, −1.46189620 × 10−3, 4.01717382 × 10−2, −3.45090396 × 10−1, 1.69375043 × 10−2, 1.18870052 × 10−3, 1.29719444 × 10−2, 4.57404515 × 10−2, 6.09297038 × 10−2, −1.67111878 × 10−2, 2.74538418 × 10−2, 7.76283972 × 10−2, −9.87016593 × 10−3, 9.83296904 × 10−3, 9.26160487 × 10−3, −1.33904678 × 10−1, −4.46698801 × 10−2, −6.22031478 × 10−2, −2.08484381 × 10−2, −1.36635522 × 10−3, 2.37264064 × 10−2, 8.05530251 × 10−2, 6.80355357 × 10−2, −1.95685395 × 10−2]] |
4. Discussion
4.1. Performance Issues
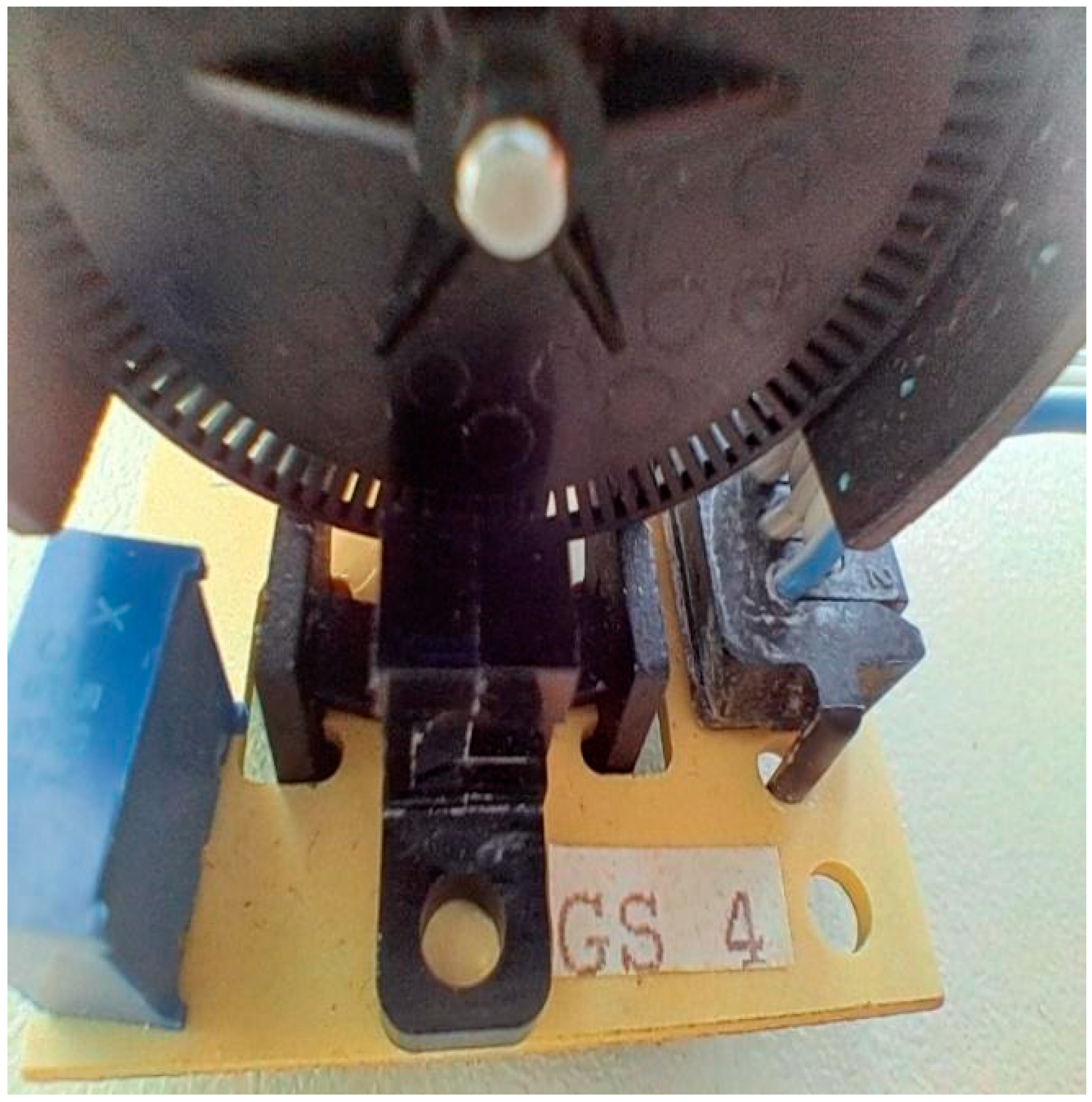
4.2. Implementation Issues
4.3. Ethical Issues
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Ogata, K. Modern Control Engineering, 5th ed.; Prentice Hall: Saddle River, NJ, USA, 2010. [Google Scholar]
- Bissell, C. A history of automatic control. In Springer Handbook of Automation; Springer: Berlin/Heidelberg, Germany, 2009; pp. 53–69. [Google Scholar]
- Baidya, D.; Dhopte, S.; Bhattacharjee, M. Sensing System Assisted Novel PID Controller for Efficient Speed Control of DC Motors in Electric Vehicles. IEEE Sens. Lett. 2023, 7, 1–4. [Google Scholar] [CrossRef]
- Munagala, V.K.; Jatoth, R.K. A novel approach for controlling DC motor speed using NARXnet based FOPID controller. Evol. Syst. 2023, 14, 101–116. [Google Scholar] [CrossRef]
- Saputra, D.; Ma’Arif, A.; Maghfiroh, H.; Chotikunnan, P.; Rahmadhia, S.N. Design and Application of PLC-based Speed Control for DC Motor Using PID with Identification System and MATLAB Tuner. Int. J. Robot. Control Syst. 2023, 3, 233–244. [Google Scholar] [CrossRef]
- Ekinci, S.; Izci, D.; Yilmaz, M. Efficient Speed Control for DC Motors Using Novel Gazelle Simplex Optimizer. IEEE Access 2023, 11, 105830–105842. [Google Scholar] [CrossRef]
- Yıldırım, Ş.; Bingol, M.S.; Savas, S. Tuning PID controller parameters of the DC motor with PSO algorithm. Int. Rev. Appl. Sci. Eng. 2024. [Google Scholar] [CrossRef]
- Son, J.; Kang, H.; Kang, S.H. A Review on Robust Control of Robot Manipulators for Future Manufacturing. Int. J. Precis. Eng. Manuf. 2023, 24, 1083–1102. [Google Scholar] [CrossRef]
- Han, D.; Mulyana, B.; Stankovic, V.; Cheng, S. A Survey on Deep Reinforcement Learning Algorithms for Robotic Manipulation. Sensors 2023, 23, 3762. [Google Scholar] [CrossRef]
- Pistone, A.; Ludovico, D.; Verme, L.D.M.C.D.; Leggieri, S.; Canali, C.; Caldwell, D.G. Modelling and control of manipulators for inspection and maintenance in challenging environments: A literature review. Annu. Rev. Control 2024, 57, 100949. [Google Scholar] [CrossRef]
- Bilal, H.; Yin, B.; Aslam, M.S.; Anjum, Z.; Rohra, A.; Wang, Y. A practical study of active disturbance rejection control for rotary flexible joint robot manipulator. Soft Comput. 2023, 27, 4987–5001. [Google Scholar] [CrossRef]
- Chotikunnan, P.; Chotikunnan, R. Dual Design PID Controller for Robotic Manipulator Application. J. Robot. Control 2023, 4, 23–34. [Google Scholar] [CrossRef]
- Villa-Tiburcio, J.F.; Estrada-Torres, J.A.; Hernández-Alvarado, R.; Montes-Martínez, J.R.; Bringas-Posadas, D.; Franco-Urquiza, E.A. ANN Enhanced Hybrid Force/Position Controller of Robot Manipulators for Fiber Placement. Robotics 2024, 13, 105. [Google Scholar] [CrossRef]
- Chang, Y.-H.; Yang, C.-Y.; Lin, H.-W. Robust Adaptive-Sliding-Mode Control for Teleoperation Systems with Time-Varying Delays and Uncertainties. Robotics 2024, 13, 89. [Google Scholar] [CrossRef]
- Kouvakas, N.D.; Koumboulis, F.N.; Sigalas, J. A Two Stage Nonlinear I/O Decoupling and Partially Wireless Controller for Differential Drive Mobile Robots. Robotics 2024, 13, 26. [Google Scholar] [CrossRef]
- Bernardo, R.; Sousa, J.M.C.; Botto, M.A.; Gonçalves, P.J.S. A Novel Control Architecture Based on Behavior Trees for an Omni-Directional Mobile Robot. Robotics 2023, 12, 170. [Google Scholar] [CrossRef]
- Miquelanti, M.G.; Pugliese, L.F.; Silva, W.W.A.G.; Braga, R.A.S.; Monte-Mor, J.A. Comparison between an Adaptive Gain Scheduling Control Strategy and a Fuzzy Multimodel Intelligent Control Applied to the Speed Control of Non-Holonomic Robots. Appl. Sci. 2024, 14, 6675. [Google Scholar] [CrossRef]
- Rodriguez-Castellanos, D.; Blas-Valdez, M.; Solis-Perales, G.; Perez-Cisneros, M.A. Neural Robust Control for a Mobile Agent Leader–Follower System. Appl. Sci. 2024, 14, 5374. [Google Scholar] [CrossRef]
- Polakovič, D.; Juhás, M.; Juhásová, B.; Červeňanská, Z. Bio-Inspired Model-Based Design and Control of Bipedal Robot. Appl. Sci. 2022, 12, 10058. [Google Scholar] [CrossRef]
- Chi, K.-H.; Hsiao, Y.-F.; Chen, C.-C. Robust Feedback Linearization Control Design for Five-Link Human Biped Robot with Multi-Performances. Appl. Sci. 2023, 13, 76. [Google Scholar] [CrossRef]
- Godinez-Garrido, G.; Santos-Sánchez, O.-J.; Romero-Trejo, H.; García-Pérez, O. Discrete Integral Optimal Controller for Quadrotor Attitude Stabilization: Experimental Results. Appl. Sci. 2023, 13, 9293. [Google Scholar] [CrossRef]
- Sonugür, G.; Gökçe, C.O.; Koca, Y.B.; Inci, Ş.S.; Keleş, Z. Particle swarm optimization based optimal PID controller for quadcopters. Comptes Rendus l’Acade’mie Bulg. Sci. 2021, 74, 1806–1814. [Google Scholar]
- He, Y.; Luo, X.; Wang, X. Research and Simulation Analysis of Fuzzy Intelligent Control System Algorithm for a Servo Precision Press. Appl. Sci. 2024, 14, 6592. [Google Scholar] [CrossRef]
- Alhamrouni, I.; Kahar, N.H.A.; Salem, M.; Swadi, M.; Zahroui, Y.; Kadhim, D.J.; Mohamed, F.A.; Nazari, M.A. A Comprehensive Review on the Role of Artificial Intelligence in Power System Stability, Control, and Protection: Insights and Future Directions. Appl. Sci. 2024, 14, 6214. [Google Scholar] [CrossRef]
- Hu, Y.; Zhou, W.; Liu, Y.; Zeng, M.; Ding, W.; Li, S.; Li, G.; Li, Z.; Knoll, A. Efficient Online Planning and Robust Optimal Control for Nonholonomic Mobile Robot in Unstructured Environments. IEEE Trans. Emerg. Top. Comput. Intell. 2024, 1–17. [Google Scholar] [CrossRef]
- Kumar, N.; Chaudhary, K.S. Neural network based fractional order sliding mode tracking control of nonholonomic mobile robots. J. Comput. Anal. Appl. 2024, 33, 73. [Google Scholar]
- Freitas, J.B.S.; Marquezan, L.; Evald, P.J.D.d.O.; Peñaloza, E.A.G.; Cely, M.M.H. A fuzzy-based Predictive PID for DC motor speed control. Int. J. Dyn. Control 2024, 12, 2511–2521. [Google Scholar] [CrossRef]
- Çelik, E.; Bal, G.; Öztürk, N.; Bekiroglu, E.; Houssein, E.H.; Ocak, C.; Sharma, G. Improving speed control characteristics of PMDC motor drives using nonlinear PI control. Neural Comput. Appl. 2024, 36, 9113–9124. [Google Scholar] [CrossRef]
- Mirjalili, S.; Gandomi, A.H.; Mirjalili, S.Z.; Saremi, S.; Faris, H.; Mirjalili, S.M. Salp Swarm Algorithm: A bio-inspired optimizer for engineering design problems. Adv. Eng. Softw. 2017, 114, 163–191. [Google Scholar] [CrossRef]
- Dawane, M.K.; Malwatkar, G.M.; Deshmukh, S.P. Performance improvement of DC servo motor using sliding mode controller. J. Auton. Intell. 2023, 7. [Google Scholar] [CrossRef]
- Gökçe, C.O. On Model Complexity and Representation Power of Artificial Neural Networks. In Engineering from Machine Learning to Virtual Reality; Şaşmaz, M., Ed.; IKSAD: Ankara, Turkey, 2022; Volume 37–52, 168p, ISBN 978-625-6380-94-3. [Google Scholar]
- Clerc, M. Particle Swarm Optimization; John Wiley & Sons: Hoboken, NJ, USA, 2010; Volume 93. [Google Scholar]
- Thomas, G.B.; Weir, M.D.; Hass, J. Thomas’ Calculus: Multivariable; Pearson Education: Hoboken, NJ, USA, 2010. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Signal Number | Type | Amplitude (rad/s) | Frequency (Hz) | Acc. Time (ms) | Dec. Time (ms) |
|---|---|---|---|---|---|
| 1 | step | 50 | NA | NA | NA |
| 2 | step | 70 | NA | NA | NA |
| 3 | step | 90 | NA | NA | NA |
| 4 | step | 100 | NA | NA | NA |
| 5 | sine | 50 | 2 | NA | NA |
| 6 | sine | 50 | 3 | NA | NA |
| 7 | sine | 50 | 5 | NA | NA |
| 8 | sine | 100 | 2 | NA | NA |
| 9 | sine | 100 | 3 | NA | NA |
| 10 | sine | 100 | 5 | NA | NA |
| Signal Number | Type | Amplitude (Volts) | Frequency (Hz) | Acc. Time (ms) | Dec. Time (ms) |
|---|---|---|---|---|---|
| 1 | step | 1 | NA | NA | NA |
| 2 | step | 1.5 | NA | NA | NA |
| 3 | step | 2 | NA | NA | NA |
| 4 | step | 3 | NA | NA | NA |
| 5 | sine | 1 | 5 | NA | NA |
| 6 | sine | 1 | 20 | NA | NA |
| 7 | sine | 2 | 5 | NA | NA |
| 8 | sine | 2 | 20 | NA | NA |
| 9 | sine | 3 | 5 | NA | NA |
| 10 | sine | 3 | 20 | NA | NA |
| Signal Number | Type | Amplitude (rad/s) | Frequency (Hz) | Acc. Time (ms) | Dec. Time (ms) |
|---|---|---|---|---|---|
| 1 | step | 100 | NA | NA | NA |
| 2 | square | 100 | 2 | NA | NA |
| 3 | square | 100 | 3 | NA | NA |
| 4 | square | 100 | 4 | NA | NA |
| 5 | square | 100 | 5 | NA | NA |
| 6 | square | 100 | 6 | NA | NA |
| 7 | square | 100 | 8 | NA | NA |
| 8 | square | 100 | 10 | NA | NA |
| 9 | trapezoid | 100 | NA | 200 | 200 |
| 10 | trapezoid | 100 | NA | 100 | 100 |
| Signal Number | Type | Amplitude (Volts) | Frequency (Hz) | Acc. Time (ms) | Dec. Time (ms) |
|---|---|---|---|---|---|
| 1 | square | 1 | 5 | NA | NA |
| 2 | square | 1 | 10 | NA | NA |
| 3 | square | 1 | 20 | NA | NA |
| 4 | square | 2 | 5 | NA | NA |
| 5 | square | 2 | 10 | NA | NA |
| 6 | square | 2 | 20 | NA | NA |
| 7 | sawtooth | 1 | 5 | NA | NA |
| 8 | sawtooth | 1 | 20 | NA | NA |
| 9 | sawtooth | 2 | 5 | NA | NA |
| 10 | sawtooth | 2 | 20 | NA | NA |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gökçe, C.O. Automatizing Automatic Controller Design Process: Designing Robust Automatic Controller under High-Amplitude Disturbances Using Particle Swarm Optimized Neural Network Controller. Appl. Sci. 2024, 14, 7859. https://doi.org/10.3390/app14177859
Gökçe CO. Automatizing Automatic Controller Design Process: Designing Robust Automatic Controller under High-Amplitude Disturbances Using Particle Swarm Optimized Neural Network Controller. Applied Sciences. 2024; 14(17):7859. https://doi.org/10.3390/app14177859
Chicago/Turabian StyleGökçe, Celal Onur. 2024. "Automatizing Automatic Controller Design Process: Designing Robust Automatic Controller under High-Amplitude Disturbances Using Particle Swarm Optimized Neural Network Controller" Applied Sciences 14, no. 17: 7859. https://doi.org/10.3390/app14177859
APA StyleGökçe, C. O. (2024). Automatizing Automatic Controller Design Process: Designing Robust Automatic Controller under High-Amplitude Disturbances Using Particle Swarm Optimized Neural Network Controller. Applied Sciences, 14(17), 7859. https://doi.org/10.3390/app14177859