
Embedding a Real-Time Strawberry Detection Model into a Pesticide-Spraying Mobile Robot for Greenhouse Operation

 ,
,  , , and
, , and 
Abstract
1. Introduction
2. Materials and Methods
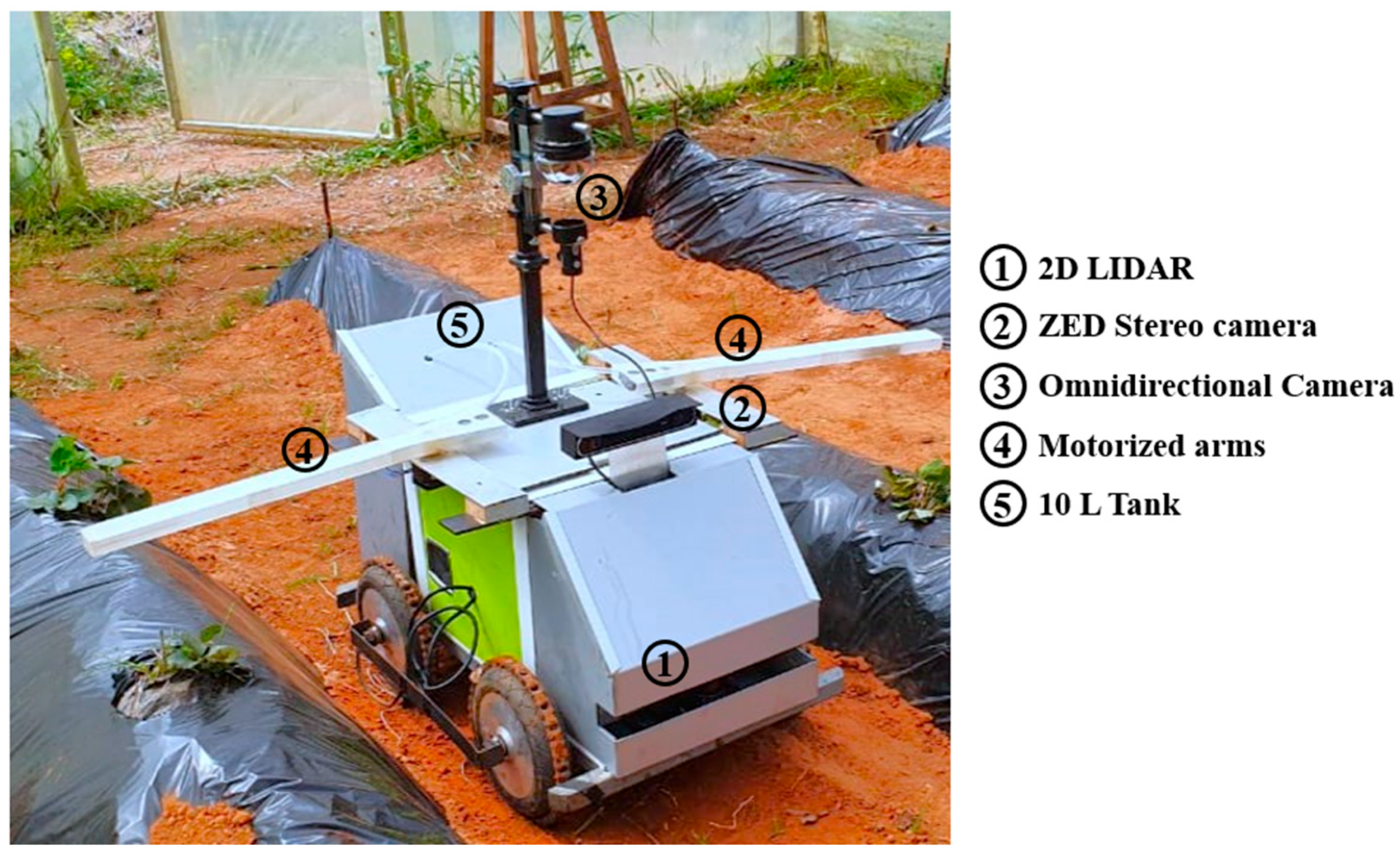
2.1. AgriEco Robot
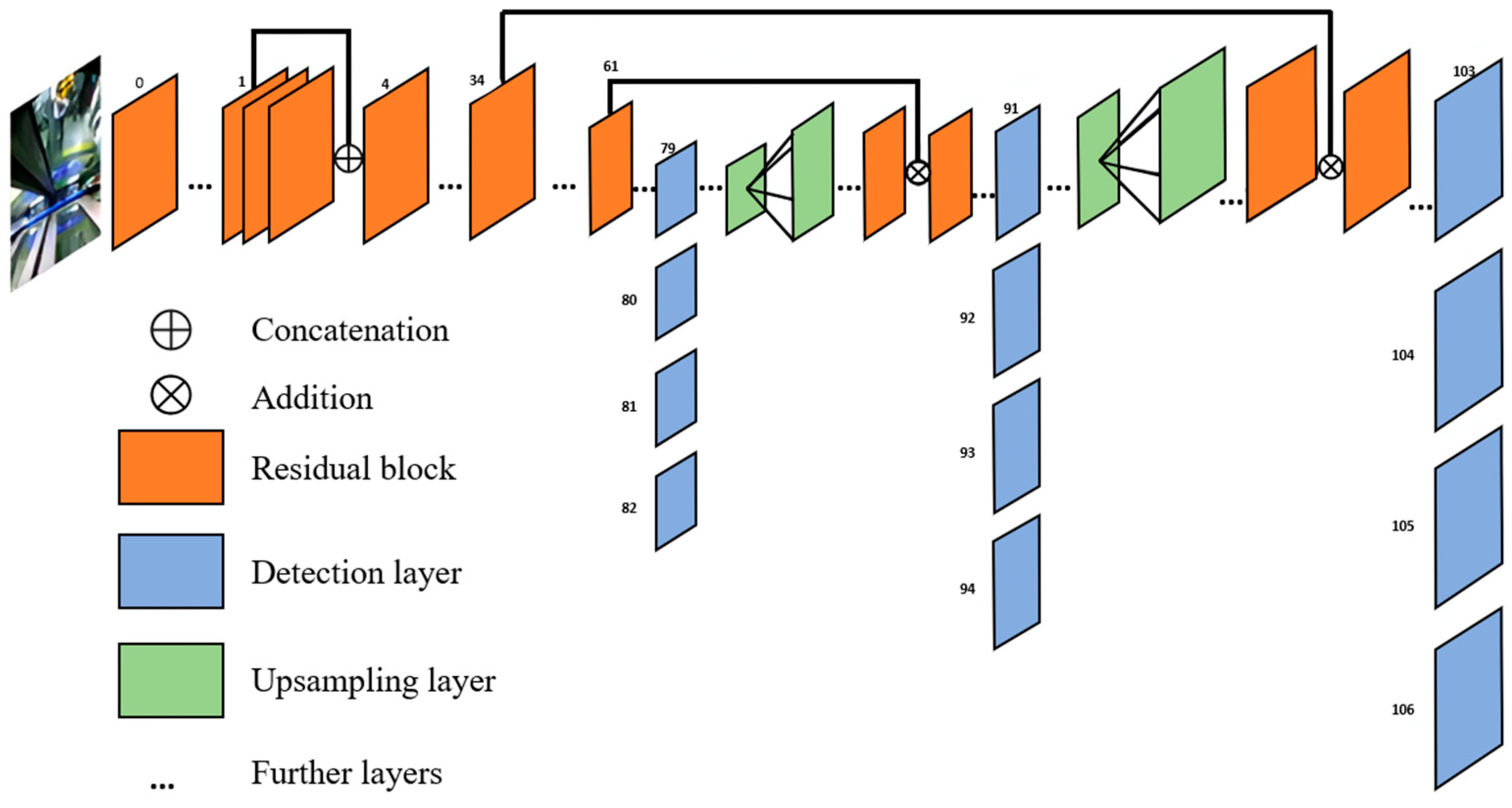
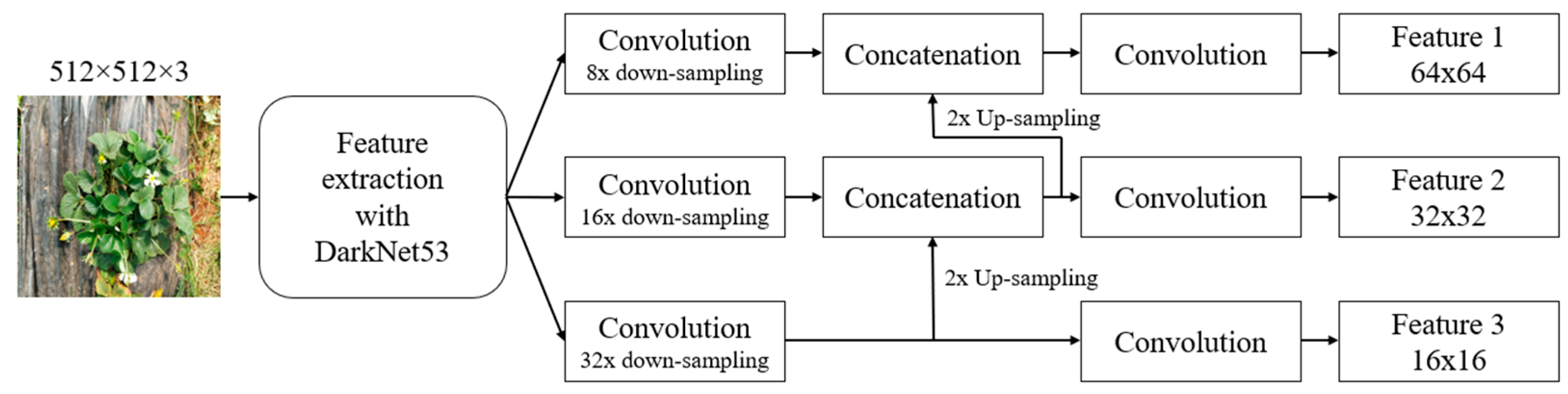
2.2. Deep Learning Model
3. Proposed Method
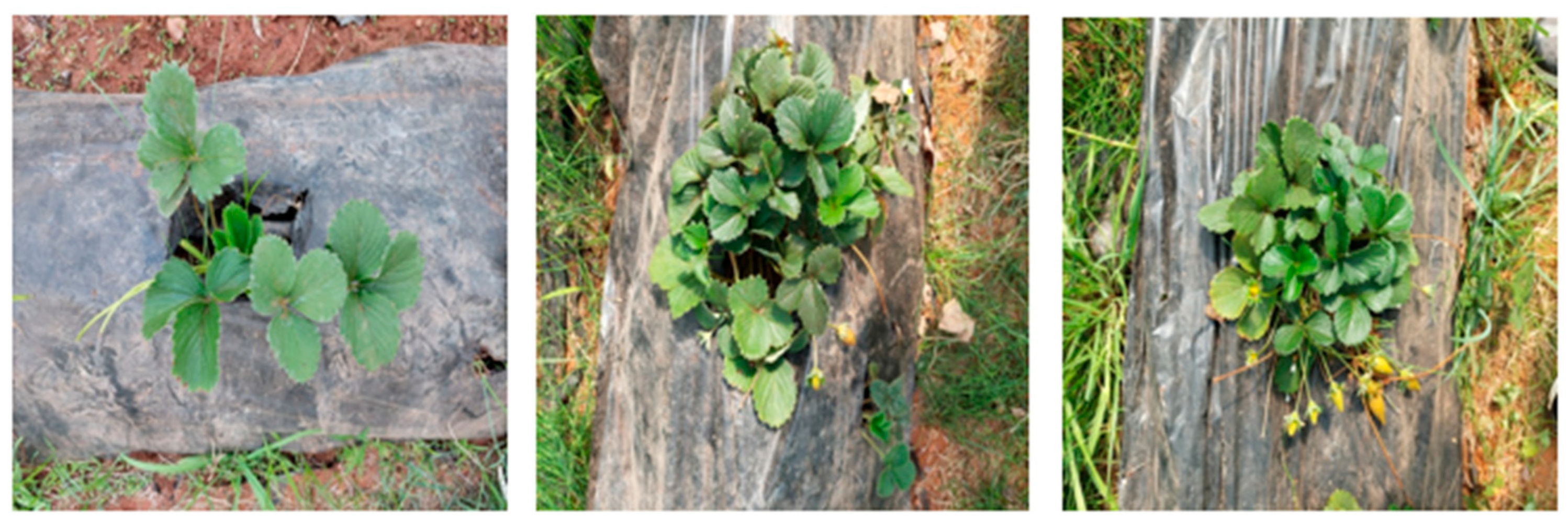
3.1. Data Acquisition
3.2. Data Augmentation
3.3. Data Pre-Processing
3.4. Running Environment
3.5. Model Training
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Food and Agriculture Organization of the United Nations (Ed.) The Future of Food and Agriculture: Trends and Challenges; Food and Agriculture Organization of the United Nations: Rome, Italy, 2017; ISBN 978-92-5-109551-5. [Google Scholar]
- Morocco—GDP Distribution Across Economic Sectors 2012–2022. Statista. Available online: https://www.statista.com/statistics/502771/morocco-gdp-distribution-across-economic-sectors/ (accessed on 6 February 2024).
- Morocco: Food Share in Merchandise Exports. Statista. Available online: https://www.statista.com/statistics/1218971/food-share-in-merchandise-exports-in-morocco/ (accessed on 6 February 2024).
- Oluwole, V. Morocco’s Fresh Strawberry Exports Generate up to $70 Million in Annual Revenue. Available online: https://africa.businessinsider.com/local/markets/moroccos-fresh-strawberry-exports-generate-up-to-dollar70-million-in-annual-revenue/yrkgkzv (accessed on 6 February 2024).
- Li, Y.; Wang, H.; Dang, L.M.; Sadeghi-Niaraki, A.; Moon, H. Crop pest recognition in natural scenes using convolutional neural networks. Comput. Electron. Agric. 2020, 169, 105174. [Google Scholar] [CrossRef]
- Pierce, F.J.; Nowak, P. Aspects of Precision Agriculture. In Advances in Agronomy; Sparks, D.L., Ed.; Academic Press: Cambridge, MA, USA, 1999; Volume 67, pp. 1–85. [Google Scholar] [CrossRef]
- Hamuda, E.; Glavin, M.; Jones, E. A survey of image processing techniques for plant extraction and segmentation in the field. Comput. Electron. Agric. 2016, 125, 184–199. [Google Scholar] [CrossRef]
- Liu, X.; Chen, S.W.; Liu, C.; Shivakumar, S.S.; Das, J.; Taylor, C.J.; Underwood, J.; Kumar, V. Monocular Camera Based Fruit Counting and Mapping with Semantic Data Association. IEEE Robot. Autom. Lett. 2019, 4, 2296–2303. [Google Scholar] [CrossRef]
- Singh, V.; Misra, A.K. Detection of plant leaf diseases using image segmentation and soft computing techniques. Inf. Process. Agric. 2017, 4, 41–49. [Google Scholar] [CrossRef]
- Malik, M.H.; Zhang, T.; Li, H.; Zhang, M.; Shabbir, S.; Saeed, A. Mature Tomato Fruit Detection Algorithm Based on improved HSV and Watershed Algorithm. IFAC-PapersOnLine 2018, 51, 431–436. [Google Scholar] [CrossRef]
- Wang, X.; Vladislav, Z.; Viktor, O.; Wu, Z.; Zhao, M. Online recognition and yield estimation of tomato in plant factory based on YOLOv3. Sci. Rep. 2022, 12, 8686. [Google Scholar] [CrossRef]
- Treboux, J.; Genoud, D. Improved Machine Learning Methodology for High Precision Agriculture. In Proceedings of the 2018 Global Internet of Things Summit (GIoTS), Bilbao, Spain, 4–7 June 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Sa, I.; Ge, Z.; Dayoub, F.; Upcroft, B.; Perez, T.; McCool, C. DeepFruits: A Fruit Detection System Using Deep Neural Networks. Sensors 2016, 16, 1222. [Google Scholar] [CrossRef]
- Lamb, N.; Chuah, M.C. A Strawberry Detection System Using Convolutional Neural Networks. In Proceedings of the 2018 IEEE International Conference on Big Data (Big Data), Seattle, WA, USA, 10–13 December 2018; pp. 2515–2520. [Google Scholar] [CrossRef]
- Yu, Y.; Zhang, K.; Yang, L.; Zhang, D. Fruit detection for strawberry harvesting robot in non-structural environment based on Mask-RCNN. Comput. Electron. Agric. 2019, 163, 104846. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollar, P.; Girshick, R. Mask R-CNN. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; IEEE: New York, NY, USA, 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Dollár, P.; Girshick, R.; He, K.; Hariharan, B.; Belongie, S. Feature Pyramid Networks for Object Detection. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 936–944. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; IEEE: New York, NY, USA, 2016; pp. 779–788. [Google Scholar] [CrossRef]
- Fu, L.; Feng, Y.; Wu, J.; Liu, Z.; Gao, F.; Majeed, Y.; Al-Mallahi, A.; Zhang, Q.; Li, R.; Cui, Y. Fast and accurate detection of kiwifruit in orchard using improved YOLOv3-tiny model. Precis. Agric. 2021, 22, 754–776. [Google Scholar] [CrossRef]
- Parico, A.I.B.; Ahamed, T. An Aerial Weed Detection System for Green Onion Crops Using the You Only Look Once (YOLOv3) Deep Learning Algorithm. Eng. Agric. Environ. Food 2020, 13, 42–48. [Google Scholar] [CrossRef]
- Liu, G.; Nouaze, J.C.; Touko Mbouembe, P.L.; Kim, J.H. YOLO-Tomato: A Robust Algorithm for Tomato Detection Based on YOLOv3. Sensors 2020, 20, 2145. [Google Scholar] [CrossRef] [PubMed]
- He, Z.; Karkee, M.; Zhang, Q. Detecting and Localizing Strawberry Centers for Robotic Harvesting in Field Environment. IFAC-PapersOnLine 2022, 55, 30–35. [Google Scholar] [CrossRef]
- Xie, Z.; Chen, R.; Lin, C.; Zeng, J. A Lightweight Real-Time Method for Strawberry Ripeness Detection Based on Improved Yolo. Available online: https://ssrn.com/abstract=4570965 (accessed on 6 February 2024).
- Zhang, Y.; Yu, J.; Chen, Y.; Yang, W.; Zhang, W.; He, Y. Real-time strawberry detection using deep neural networks on embedded system (rtsd-net): An edge AI application. Comput. Electron. Agric. 2022, 192, 106586. [Google Scholar] [CrossRef]
- Yang, S.; Zhang, J.; Bo, C.; Wang, M.; Chen, L. Fast vehicle logo detection in complex scenes. Opt. Laser Technol. 2019, 110, 196–201. [Google Scholar] [CrossRef]
- Ghafar, A.S.A.; Hajjaj, S.S.H.; Gsangaya, K.R.; Sultan, M.T.H.; Mail, M.F.; Hua, L.S. Design and development of a robot for spraying fertilizers and pesticides for agriculture. Mater. Today Proc. 2023, 81, 242–248. [Google Scholar] [CrossRef]
- Ma, B.; Hua, Z.; Wen, Y.; Deng, H.; Zhao, Y.; Pu, L.; Song, H. Using an improved lightweight YOLOv8 model for real-time detection of multi-stage apple fruit in complex orchard environments. Artif. Intell. Agric. 2024, 11, 70–82. [Google Scholar] [CrossRef]
- Solimani, F.; Cardellicchio, A.; Dimauro, G.; Petrozza, A.; Summerer, S.; Cellini, F.; Renò, V. Optimizing tomato plant phenotyping detection: Boosting YOLOv8 architecture to tackle data complexity. Comput. Electron. Agric. 2024, 218, 108728. [Google Scholar] [CrossRef]
- Madasamy, K.; Shanmuganathan, V.; Kandasamy, V.; Lee, M.Y.; Thangadurai, M. OSDDY: Embedded system-based object surveillance detection system with small drone using deep YOLO. J. Image Video Proc. 2021, 2021, 19. [Google Scholar] [CrossRef]
- Abanay, A.; Masmoudi, L.; Ansari, M.E.; Gonzalez-Jimenez, J.; Moreno, F.-A.; Abanay, A.; Masmoudi, L.; Ansari, M.E.; Gonzalez-Jimenez, J.; Moreno, F.-A. LIDAR-based autonomous navigation method for an agricultural mobile robot in strawberry greenhouse: AgriEco Robot. AIMS Electron. Electr. Eng. 2022, 6, 317–328. [Google Scholar] [CrossRef]
- Abanay, A.; Masmoudi, L.; El Ansari, M. A calibration method of 2D LIDAR-Visual sensors embedded on an agricultural robot. Optik 2022, 249, 168254. [Google Scholar] [CrossRef]
- Min, S.K.; Delgado, R.; Byoung, W.C. Comparative Study of ROS on Embedded System for a Mobile Robot. J. Autom. Mob. Robot. Intell. Syst. 2018, 12, 61–67. [Google Scholar]
- Amert, T.; Otterness, N.; Yang, M.; Anderson, J.H.; Smith, F.D. GPU Scheduling on the NVIDIA TX2: Hidden Details Revealed. In Proceedings of the 2017 IEEE Real-Time Systems Symposium (RTSS), Paris, France, 5–8 December 2017; pp. 104–115. [Google Scholar] [CrossRef]
- Jiang, P.; Qi, A.; Zhong, J.; Luo, Y.; Hu, W.; Shi, Y.; Liu, T. Field cabbage detection and positioning system based on improved YOLOv8n. Plant Methods 2024, 20, 96. [Google Scholar] [CrossRef]
- Zhou, J.; Hu, W.; Zou, A.; Zhai, S.; Liu, T.; Yang, W.; Jiang, P. Lightweight Detection Algorithm of Kiwifruit Based on Improved YOLOX-S. Agriculture 2022, 12, 7. [Google Scholar] [CrossRef]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft COCO: Common Objects in Context. In Proceedings of the Computer Vision—ECCV 2014, Zurich, Switzerland, 6–12 September 2014; Fleet, D., Pajdla, T., Schiele, B., Tuytelaars, T., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 740–755. [Google Scholar] [CrossRef]
- Redmon, J.; Farhadi, A. YOLOv3: An Incremental Improvement. Comput. Vis. Pattern Recognit. 2018, 1804, 1–6. [Google Scholar]
- Beyaz, A.; Gül, V. YOLOv4 and Tiny YOLOv4 Based Forage Crop Detection with an Artificial Intelligence Board. Braz. Arch. Biol. Technol. 2023, 66, e23220803. [Google Scholar] [CrossRef]
- Li, C.; Zhang, B.; Li, L.; Li, L.; Geng, Y.; Cheng, M.; Xiaoming, X.; Chu, X.; Wei, X. Yolov6: A single-stage object detection framework for industrial applications. In Proceedings of the Twelfth International Conference on Learning Representations (ICLR2024), Vienna, Austria, 7–11 May 2024; Available online: https://openreview.net/forum?id=7c3ZOKGQ6s (accessed on 10 July 2024).
- Ponnusamy, V.; Coumaran, A.; Shunmugam, A.S.; Rajaram, K.; Senthilvelavan, S. Smart Glass: Real-Time Leaf Disease Detection using YOLO Transfer Learning. In Proceedings of the 2020 International Conference on Communication and Signal Processing (ICCSP), Melmaruvathur, India, 28–30 July 2020; pp. 1150–1154. [Google Scholar] [CrossRef]
- Qin, Z.; Wang, W.; Dammer, K.-H.; Guo, L.; Cao, Z. Ag-YOLO: A Real-Time Low-Cost Detector for Precise Spraying with Case Study of Palms. Front. Plant Sci. 2021, 12, 753603. [Google Scholar] [CrossRef]
- Buzzy, M.; Thesma, V.; Davoodi, M.; Mohammadpour Velni, J. Real-Time Plant Leaf Counting Using Deep Object Detection Networks. Sensors 2020, 20, 6896. [Google Scholar] [CrossRef]
- Dai, Y.; Liu, W.; Li, H.; Liu, L. Efficient Foreign Object Detection Between PSDs and Metro Doors via Deep Neural Networks. IEEE Access 2020, 8, 46723–46734. [Google Scholar] [CrossRef]
- Wu, D.; Wang, Y.; Xia, S.-T.; Bailey, J.; Ma, X. Skip Connections Matter: On the Transferability of Adversarial Examples Generated with ResNets. In Proceedings of the 2020 International Conference on Learning Representations, Addis Ababa, Ethiopia, 30 April 2020; Available online: https://openreview.net/forum?id=BJlRs34Fvr (accessed on 17 July 2023).
- Mubashar, M.; Ali, H.; Grönlund, C.; Azmat, S. R2U++: A multiscale recurrent residual U-Net with dense skip connections for medical image segmentation. Neural Comput. Appl. 2022, 34, 17723–17739. [Google Scholar] [CrossRef]
- Peng, Y.; Zhang, L.; Liu, S.; Wu, X.; Zhang, Y.; Wang, X. Dilated Residual Networks with Symmetric Skip Connection for image denoising. Neurocomputing 2019, 345, 67–76. [Google Scholar] [CrossRef]
- Wang, H.; Hu, Z.; Guo, Y.; Yang, Z.; Zhou, F.; Xu, P. A Real-Time Safety Helmet Wearing Detection Approach Based on CSYOLOv3. Appl. Sci. 2020, 10, 6732. [Google Scholar] [CrossRef]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection over Union: A Metric and A Loss for Bounding Box Regression. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 16–20 June 2019; pp. 658–666. [Google Scholar] [CrossRef]
- Bargoti, S.; Underwood, J.P. Image Segmentation for Fruit Detection and Yield Estimation in Apple Orchards. J. Field Robot. 2017, 34, 1039–1060. [Google Scholar] [CrossRef]
- Sun, C.; Shrivastava, A.; Singh, S.; Gupta, A. Revisiting Unreasonable Effectiveness of Data in Deep Learning Era. In Proceedings of the 2017 IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 October 2017; IEEE: New York, NY, USA, 2017; pp. 843–852. [Google Scholar] [CrossRef]
- Tian, Y.; Yang, G.; Wang, Z.; Wang, H.; Li, E.; Liang, Z. Apple detection during different growth stages in orchards using the improved YOLO-V3 model. Comput. Electron. Agric. 2019, 157, 417–426. [Google Scholar] [CrossRef]
- Shorten, C.; Khoshgoftaar, T.M. A survey on Image Data Augmentation for Deep Learning. J. Big Data 2019, 6, 60. [Google Scholar] [CrossRef]
- Skalski, P. Makesense.Ai. Available online: https://github.com/SkalskiP/make-sense (accessed on 18 July 2023).
- Sutanto, A.R.; Kang, D.-K. A Novel Diminish Smooth L1 Loss Model with Generative Adversarial Network. In Proceedings of the Intelligent Human Computer Interaction, Daegu, Republic of Korea, 24–26 November 2020; Singh, M., Kang, D.-K., Lee, J.-H., Tiwary, U.S., Singh, D., Chung, W.-Y., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 361–368. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| YOLO Version | Parameters | Processing Speed (FPS) | mAP (COCO) |
|---|---|---|---|
| YOLOv3 [38] | 61.5 million | ~10–15 FPS | 57.9% |
| YOLOv4-tiny [39] | 6 million | ~25–30 FPS | 36.9% |
| YOLOv5-Small [40] | 7.2 million | ~20–25 FPS | 39.4% |
| YOLOv5-medium [40] | 21.2 million | ~15–20 FPS | 45.4% |
| CPU | Intel® i7 8th Gen |
| GPU | NVidia GTX 1070 |
| Frequency | 3.2 GHz |
| RAM | 16 GB |
| Storage | 500 Gb SSD |
| Operating system | Windows 10 |
| Programming platform | Python 3.8 |
| Training process | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| Best validation loss | 8.75 | 8.43 | 8.69 | 8.40 | 8.33 | 8.00 | 7.75 | 8.25 | 8.10 | 7.94 |
| Epoch | 13 | 17 | 10 | 12 | 8 | 13 | 7 | 15 | 11 | 9 |
| Iterations | 8000 |
| Batch size | 4 |
| Learning rate | 0.0001 |
| Epochs | 10 |
| Confidence threshold | 0.5 |
| Model | Precision | Recall | F1 Score |
|---|---|---|---|
| YOLOv3 | 0.73 | 0.95 | 0.83 |
| YOLOv3-tiny | 0.60 | 0.71 | 0.65 |
| Model | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| YOLOv3 | YOLOv3 with ONNX | YOLOv3-Tiny | YOLOv3-Tiny with ONNX | ||||||
| Data | Resolution | mAP | FPS | mAP | FPS | mAP | FPS | mAP | FPS |
| Video | 1920 × 1080 | 93.5% | 3 | 96.3% | 6 | 89.5% | 5 | 90.7% | 8 |
| Live video | 640 × 480 | 90.4% | 4 | 94% | 8 | 86.1% | 7 | 88.3% | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El Amraoui, K.; El Ansari, M.; Lghoul, M.; El Alaoui, M.; Abanay, A.; Jabri, B.; Masmoudi, L.; Valente de Oliveira, J. Embedding a Real-Time Strawberry Detection Model into a Pesticide-Spraying Mobile Robot for Greenhouse Operation. Appl. Sci. 2024, 14, 7195. https://doi.org/10.3390/app14167195
El Amraoui K, El Ansari M, Lghoul M, El Alaoui M, Abanay A, Jabri B, Masmoudi L, Valente de Oliveira J. Embedding a Real-Time Strawberry Detection Model into a Pesticide-Spraying Mobile Robot for Greenhouse Operation. Applied Sciences. 2024; 14(16):7195. https://doi.org/10.3390/app14167195
Chicago/Turabian StyleEl Amraoui, Khalid, Mohamed El Ansari, Mouataz Lghoul, Mustapha El Alaoui, Abdelkrim Abanay, Bouazza Jabri, Lhoussaine Masmoudi, and José Valente de Oliveira. 2024. "Embedding a Real-Time Strawberry Detection Model into a Pesticide-Spraying Mobile Robot for Greenhouse Operation" Applied Sciences 14, no. 16: 7195. https://doi.org/10.3390/app14167195
APA StyleEl Amraoui, K., El Ansari, M., Lghoul, M., El Alaoui, M., Abanay, A., Jabri, B., Masmoudi, L., & Valente de Oliveira, J. (2024). Embedding a Real-Time Strawberry Detection Model into a Pesticide-Spraying Mobile Robot for Greenhouse Operation. Applied Sciences, 14(16), 7195. https://doi.org/10.3390/app14167195