
Research on Bifurcated Origami Hydraulic Dampers for Real Road Vibration Loads


Abstract
1. Introduction
2. Materials and Methods
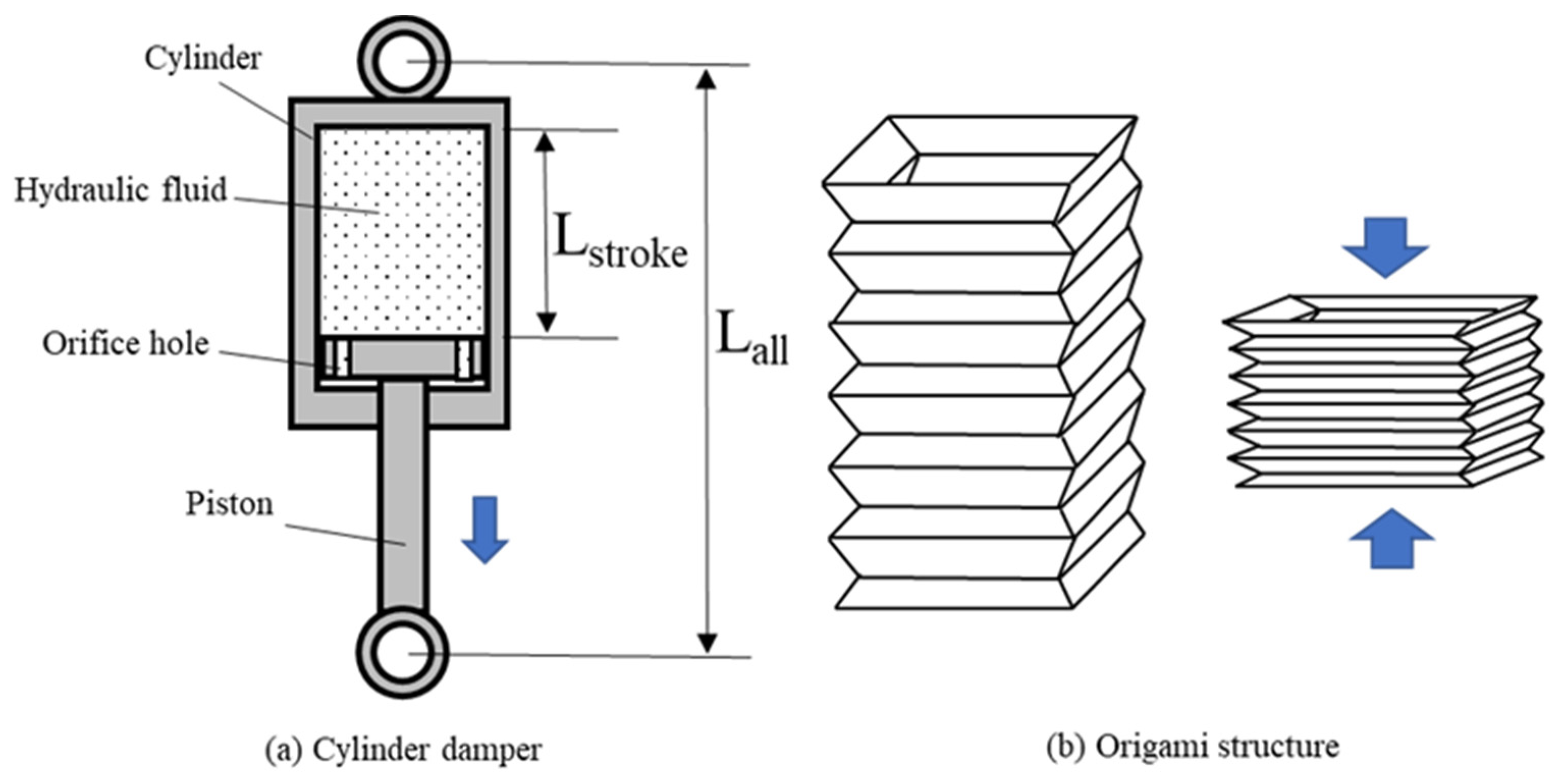
2.1. Bifurcated Origami Hydraulic Damper
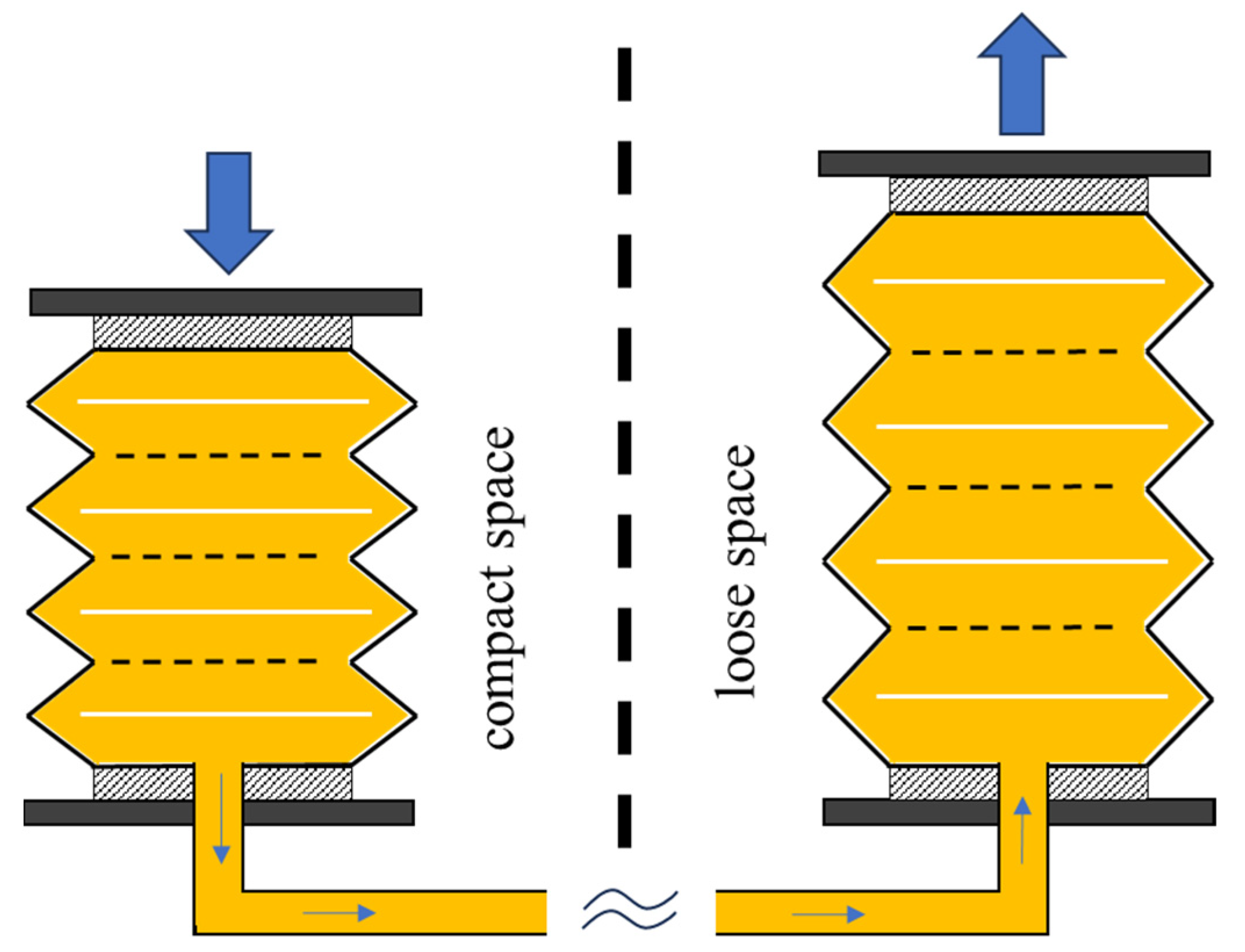
2.2. Damping Force Analysis of Bifurcated Origami Hydraulic Damper
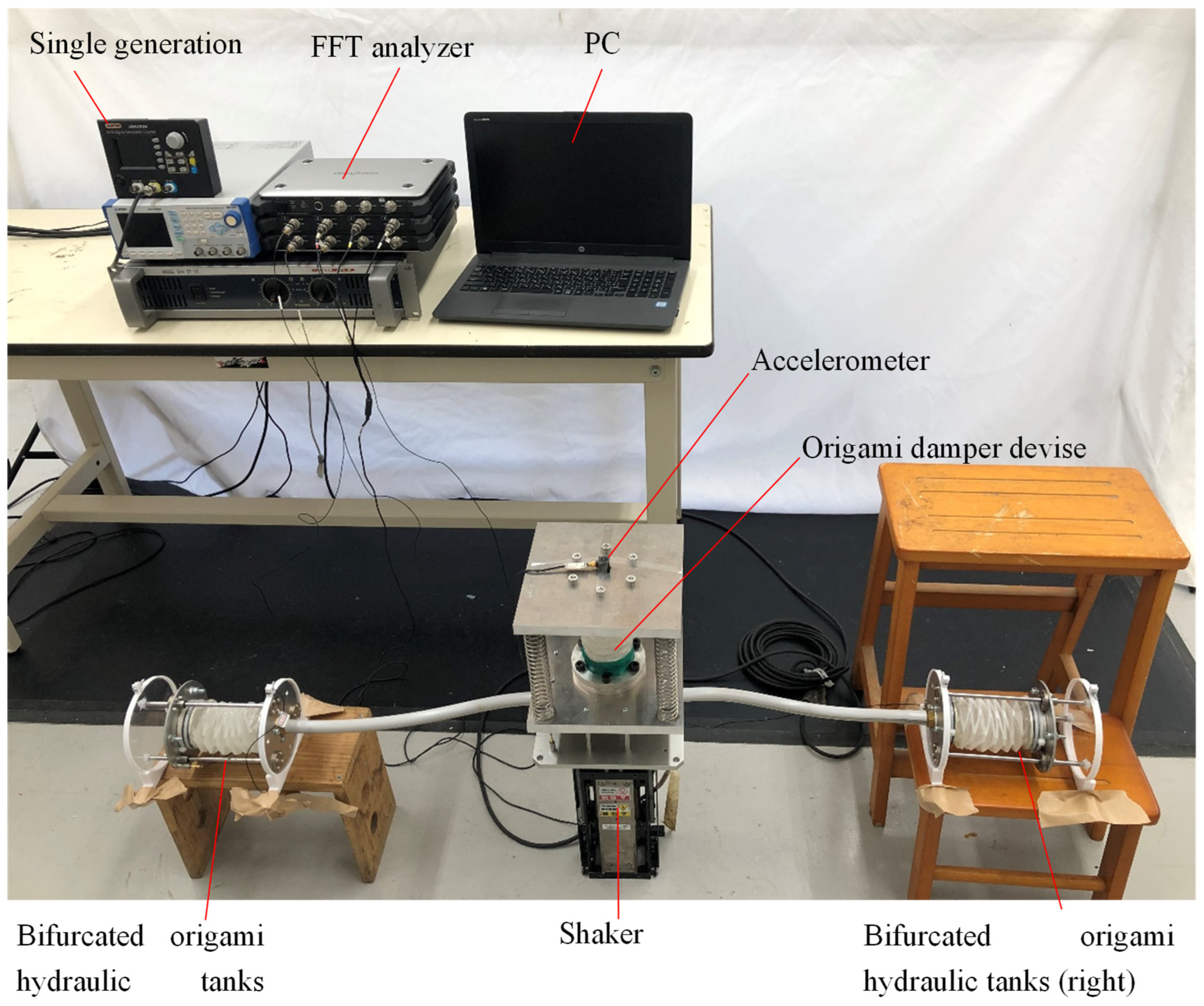
2.3. Vibration Verification Experiment
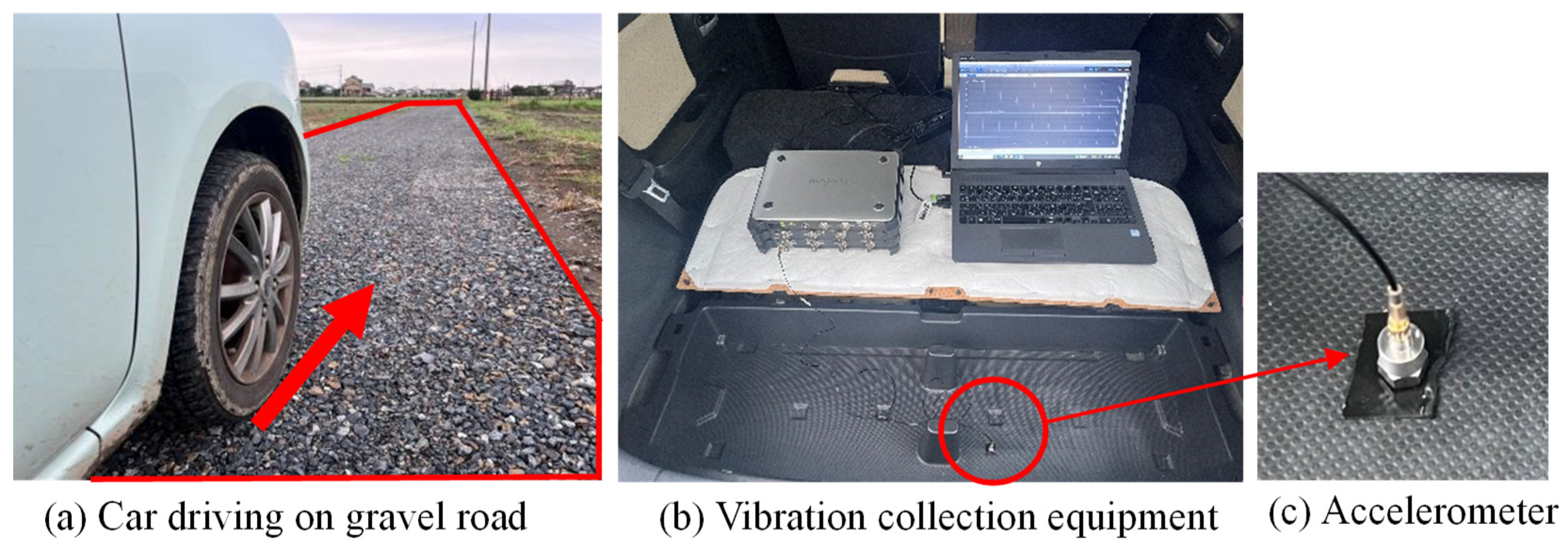
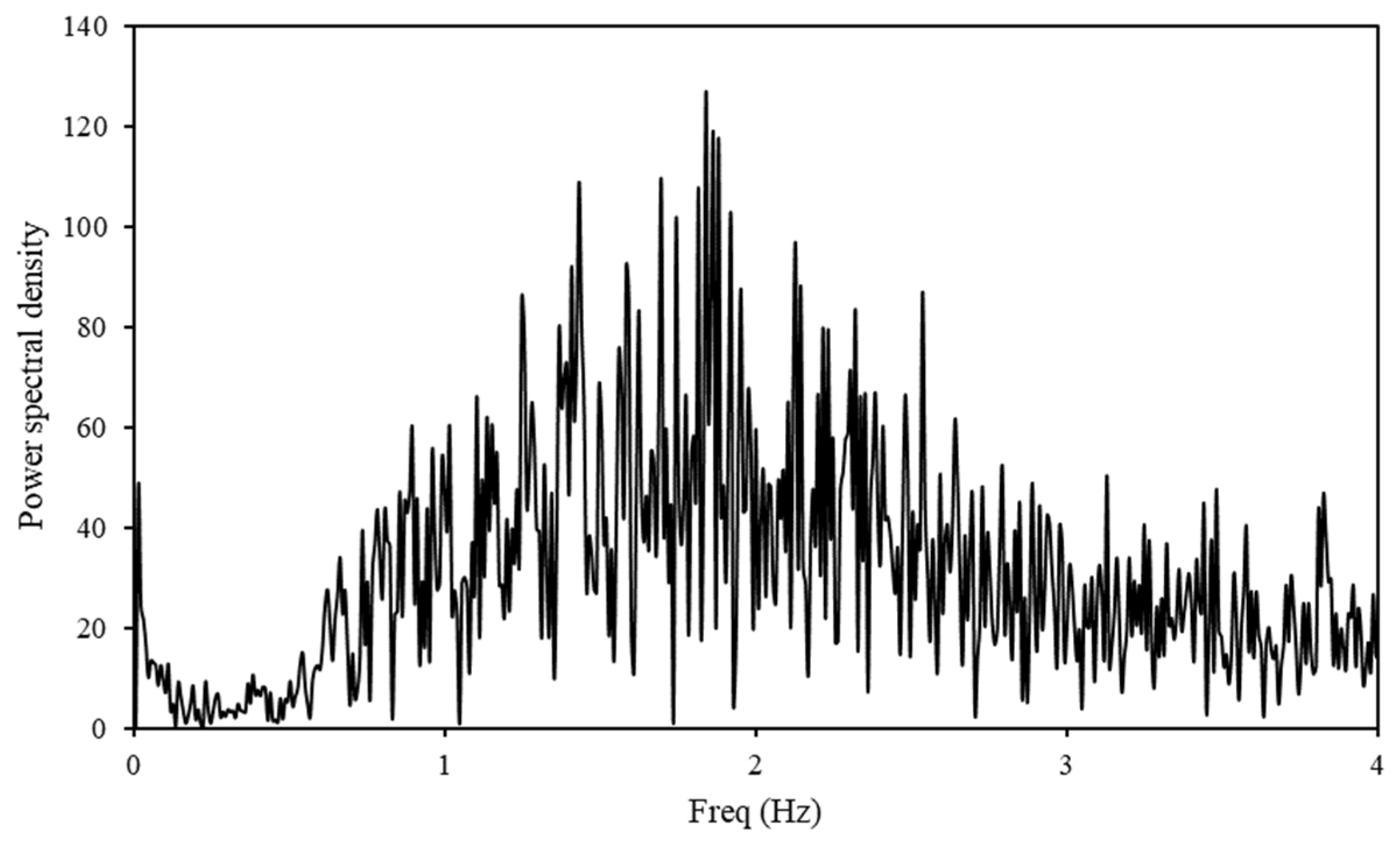
2.4. Vibration Wave When Driving on Gravel Road
3. Results and Discussion
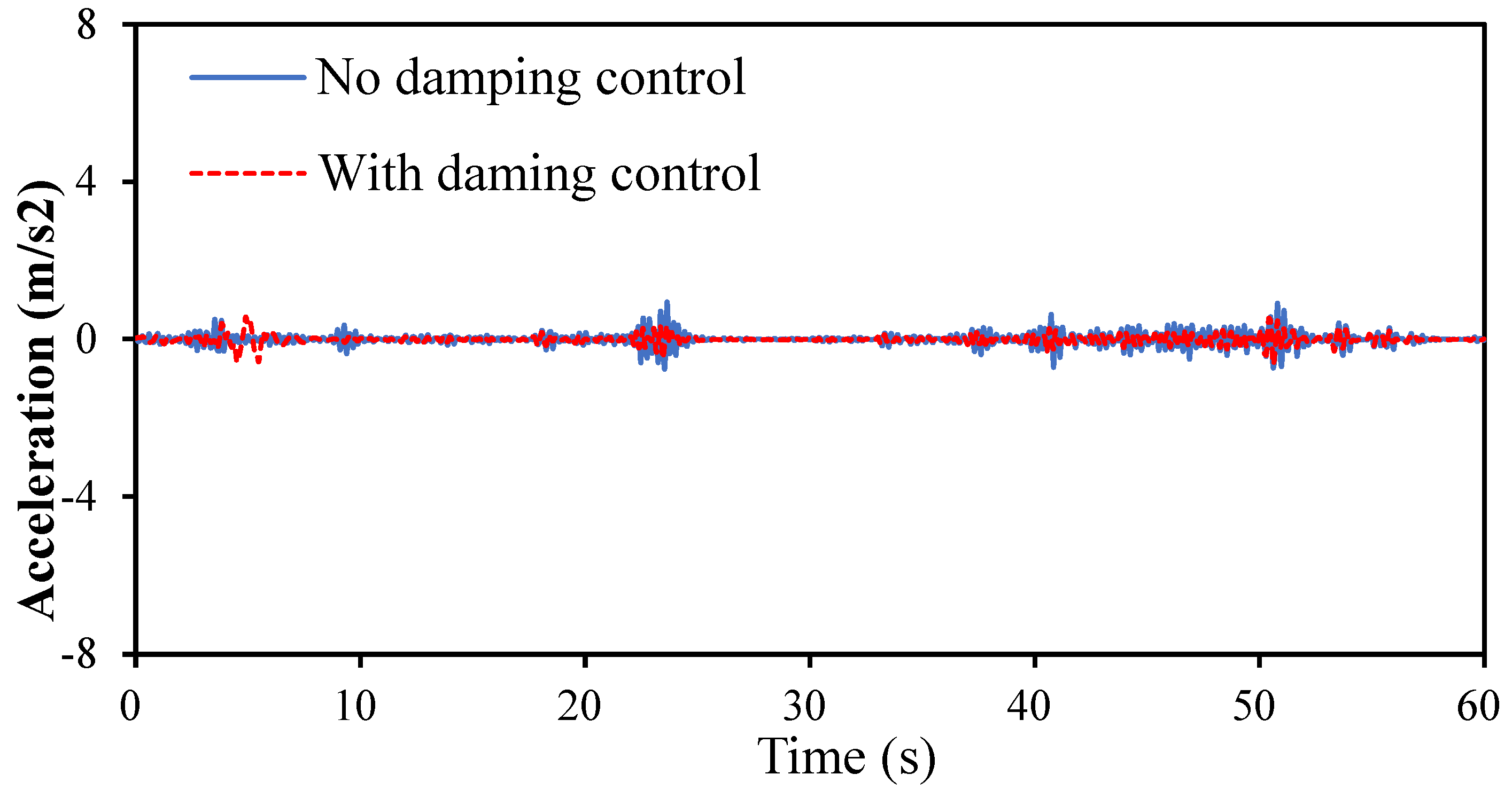
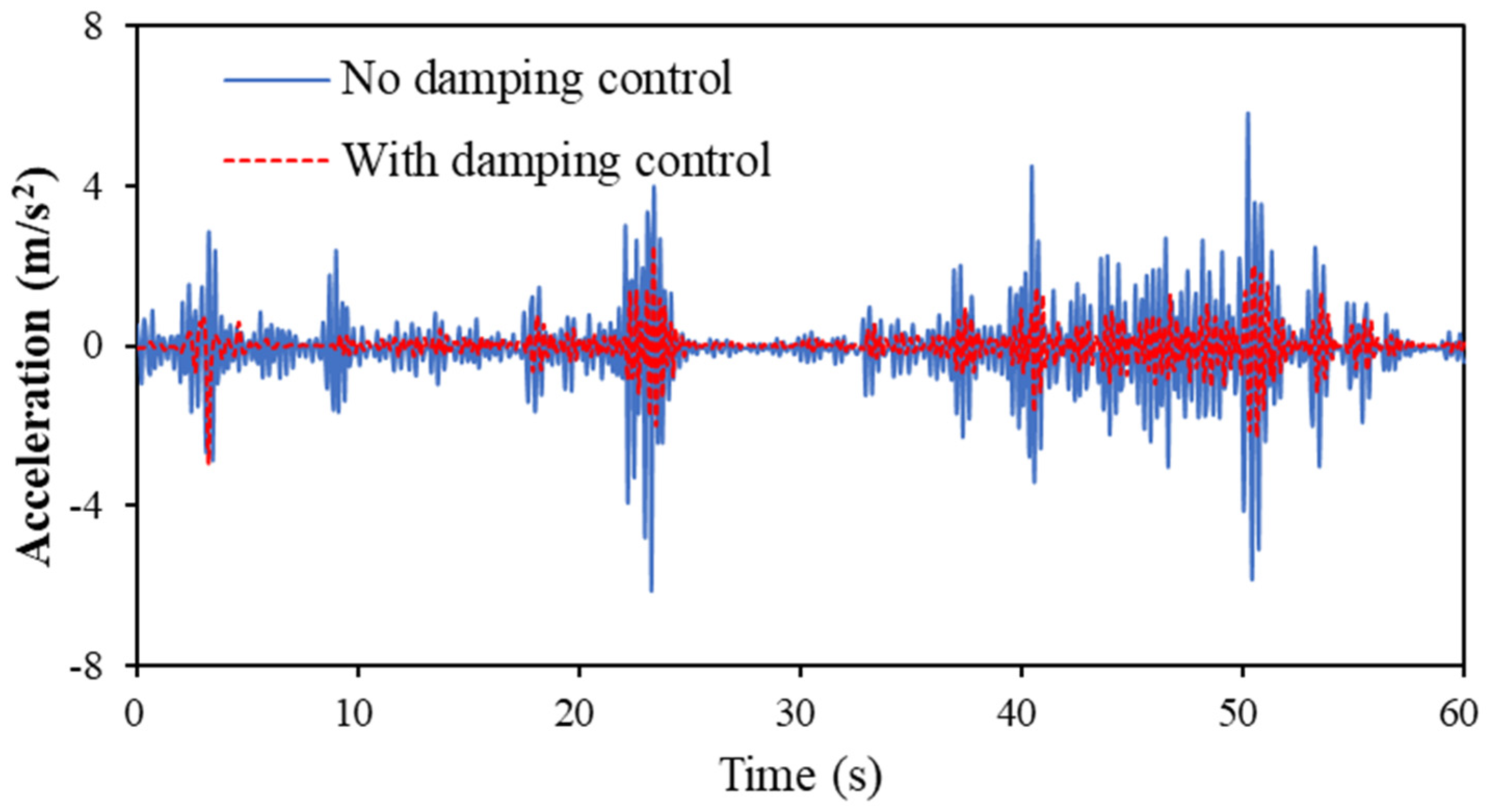
3.1. Damping Effects
3.2. Effects of Orifice Holes
3.3. Effects of Liquid Types
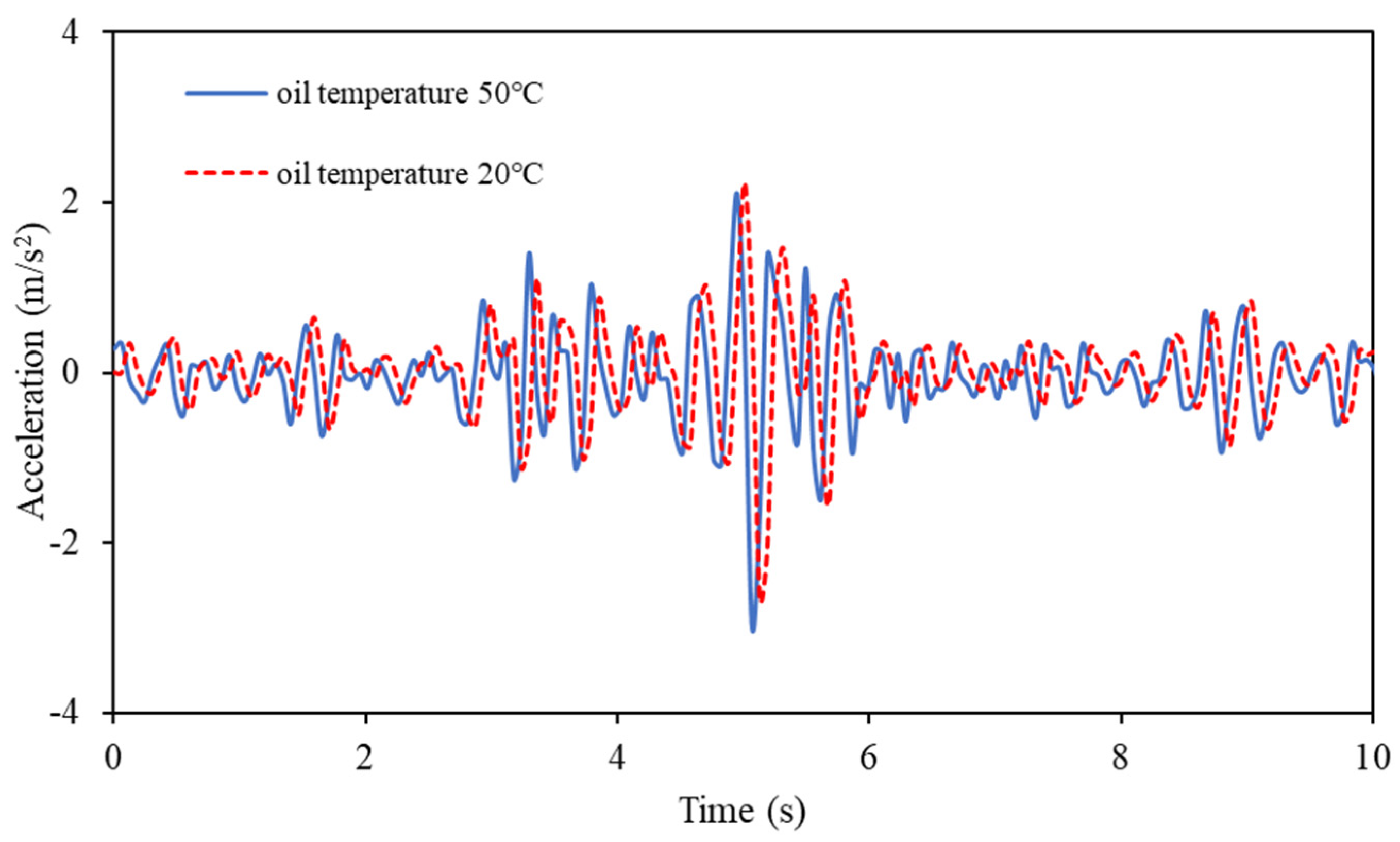
3.4. Effects of Temperature
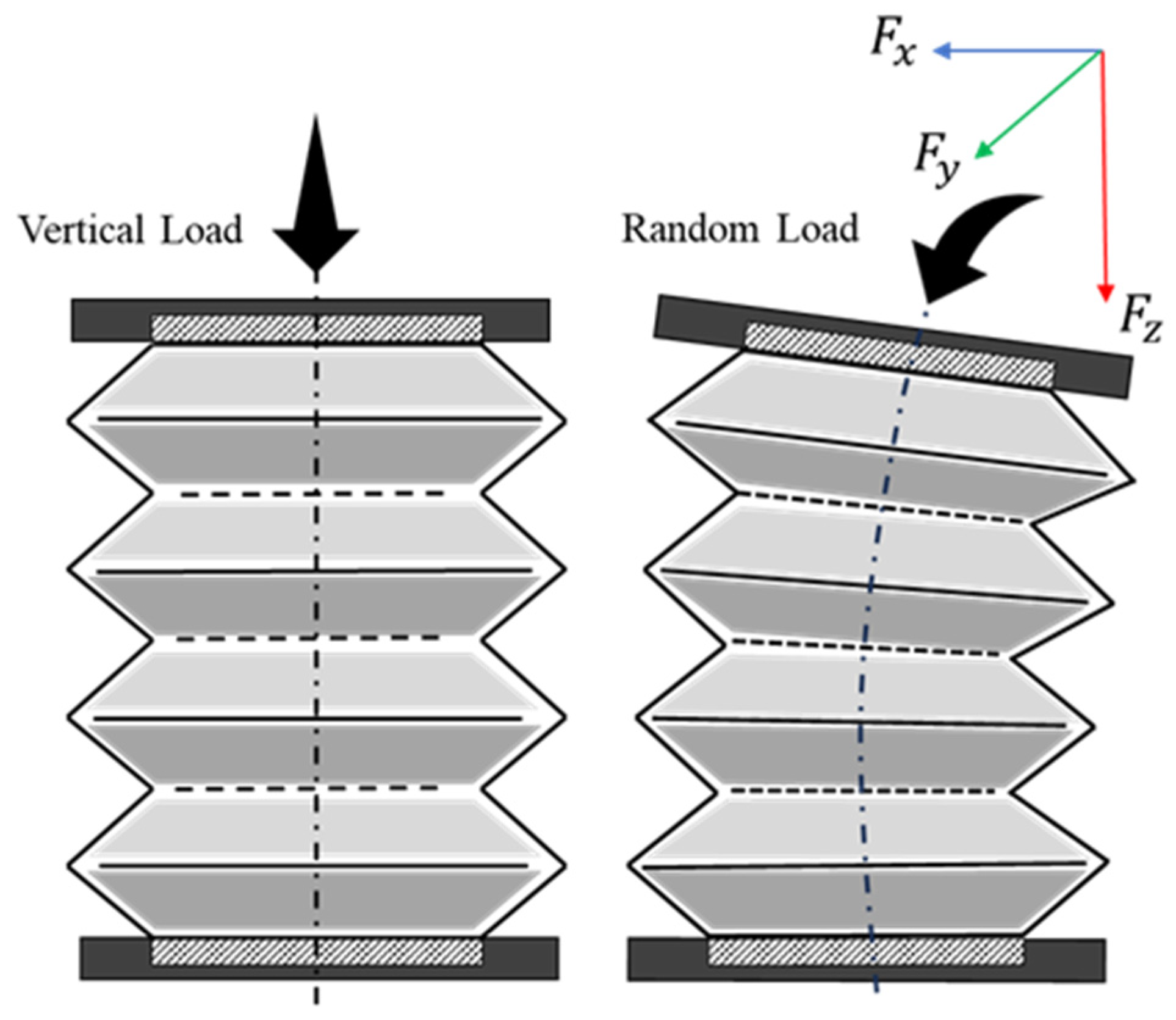
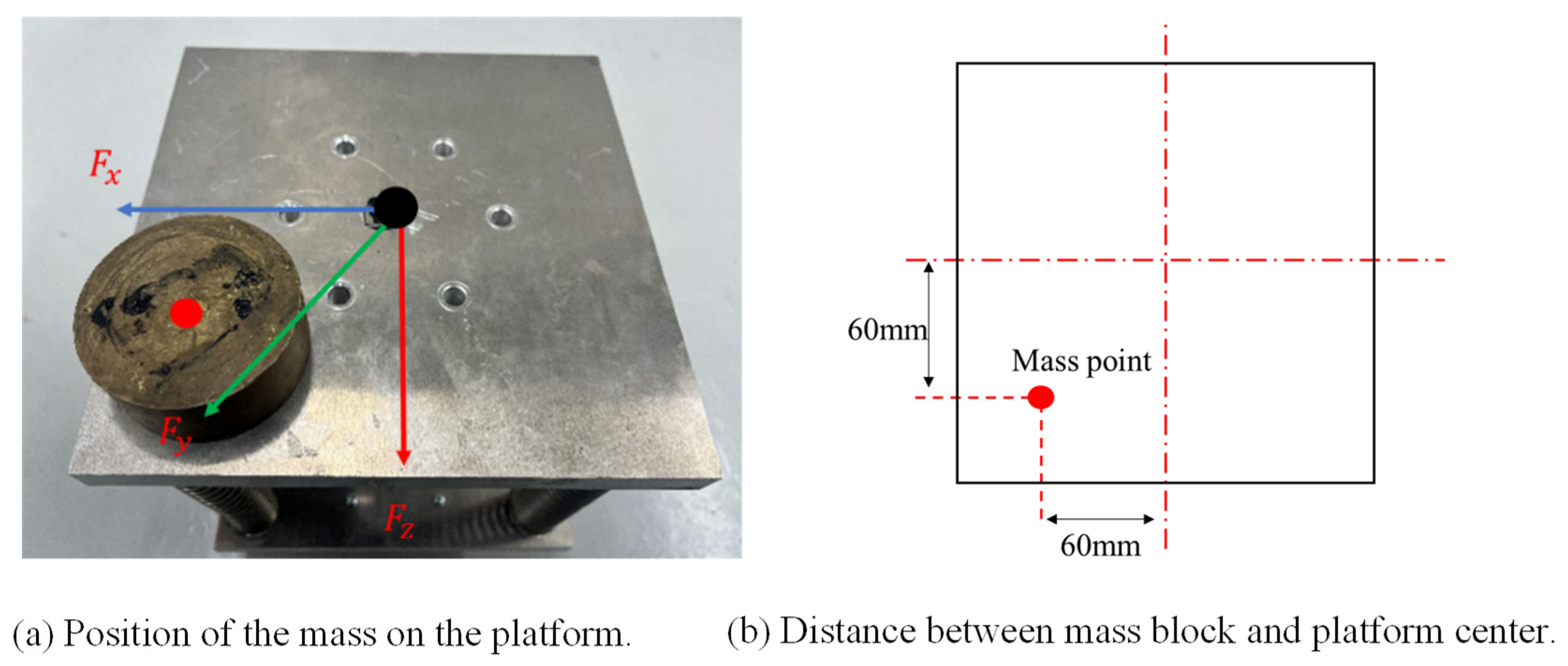
3.5. Effects of Vibration Loads
4. Conclusions and Future Work
- (1)
- Through analysis of the mechanical characteristics and derivation of a new damping force formula, it was demonstrated that the damping force of the bifurcated origami hydraulic damper is directly proportional to the square of the velocity of motion;
- (2)
- A vibration test apparatus incorporating a bifurcated origami hydraulic damper was developed. Summarizing the main components—mass block as the damping object, elastic spring device, bifurcated origami hydraulic damper, and friction-induced damping elements—we established control equations for nonlinear motion and proposed a numerical analysis approach using the Runge–Kutta method. Numerical results aligned well with actual experimental measurements;
- (3)
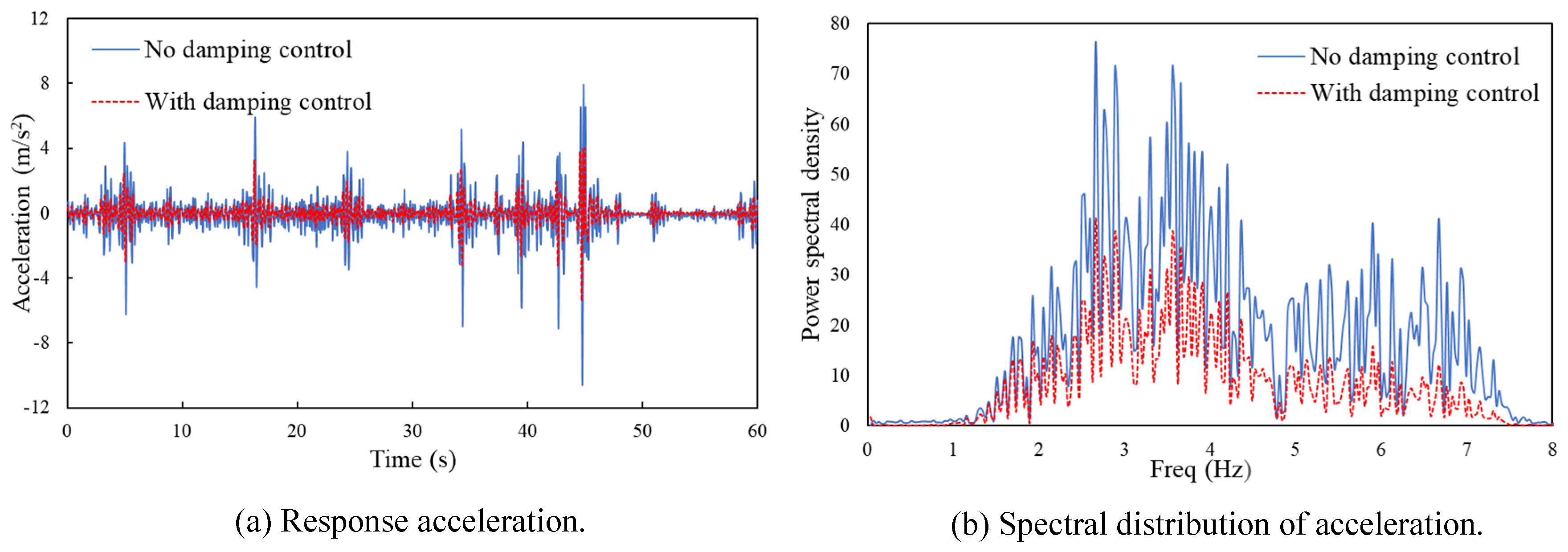
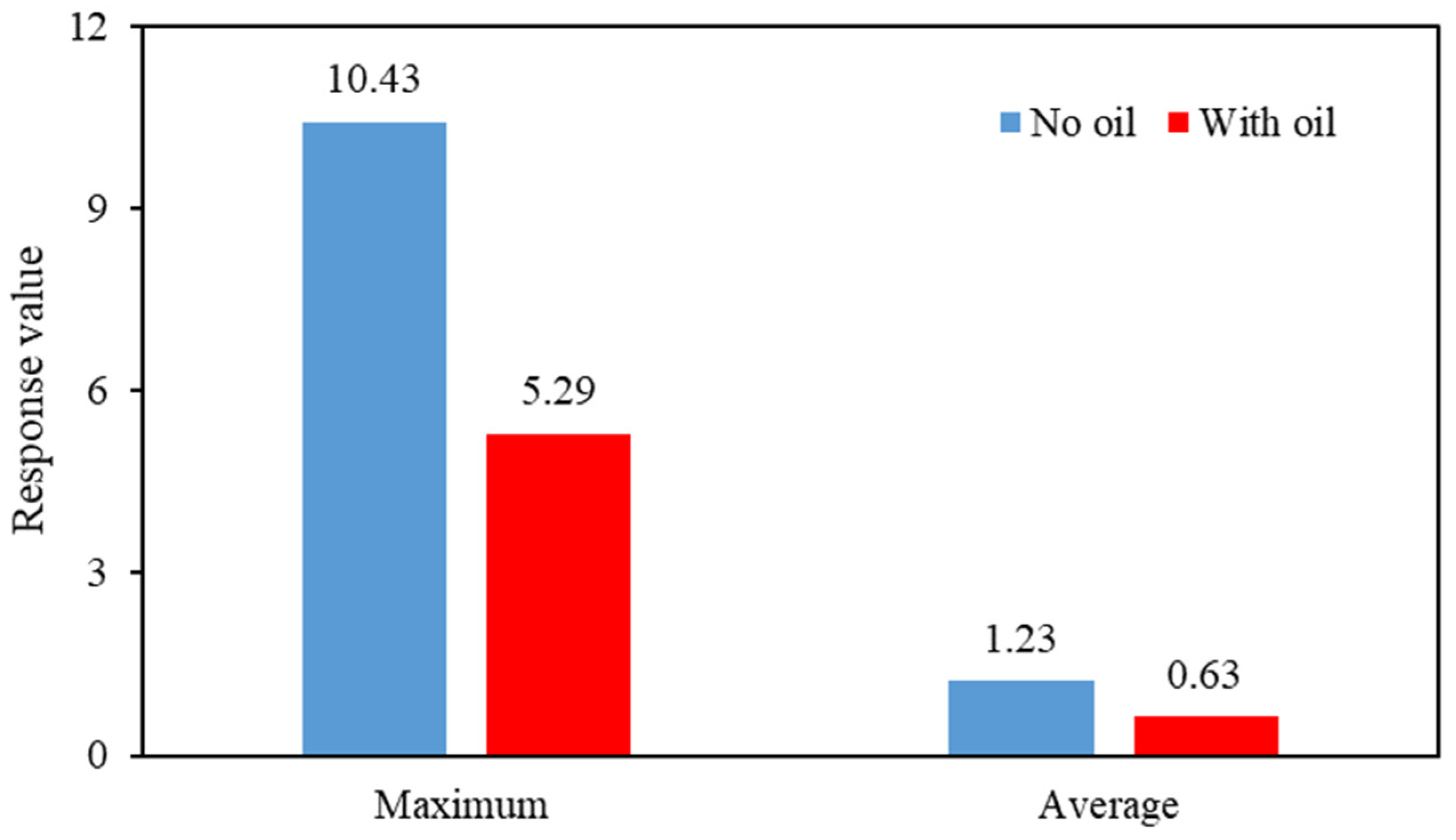
- Vibration experiments were conducted using random vibration waves recorded on a gravel road. Results showed that damping effectiveness was nearly halved when oil was injected into the bifurcated origami hydraulic damper compared with conditions without oil injection, underscoring the significant vibration-damping capability of the damper;
- (4)
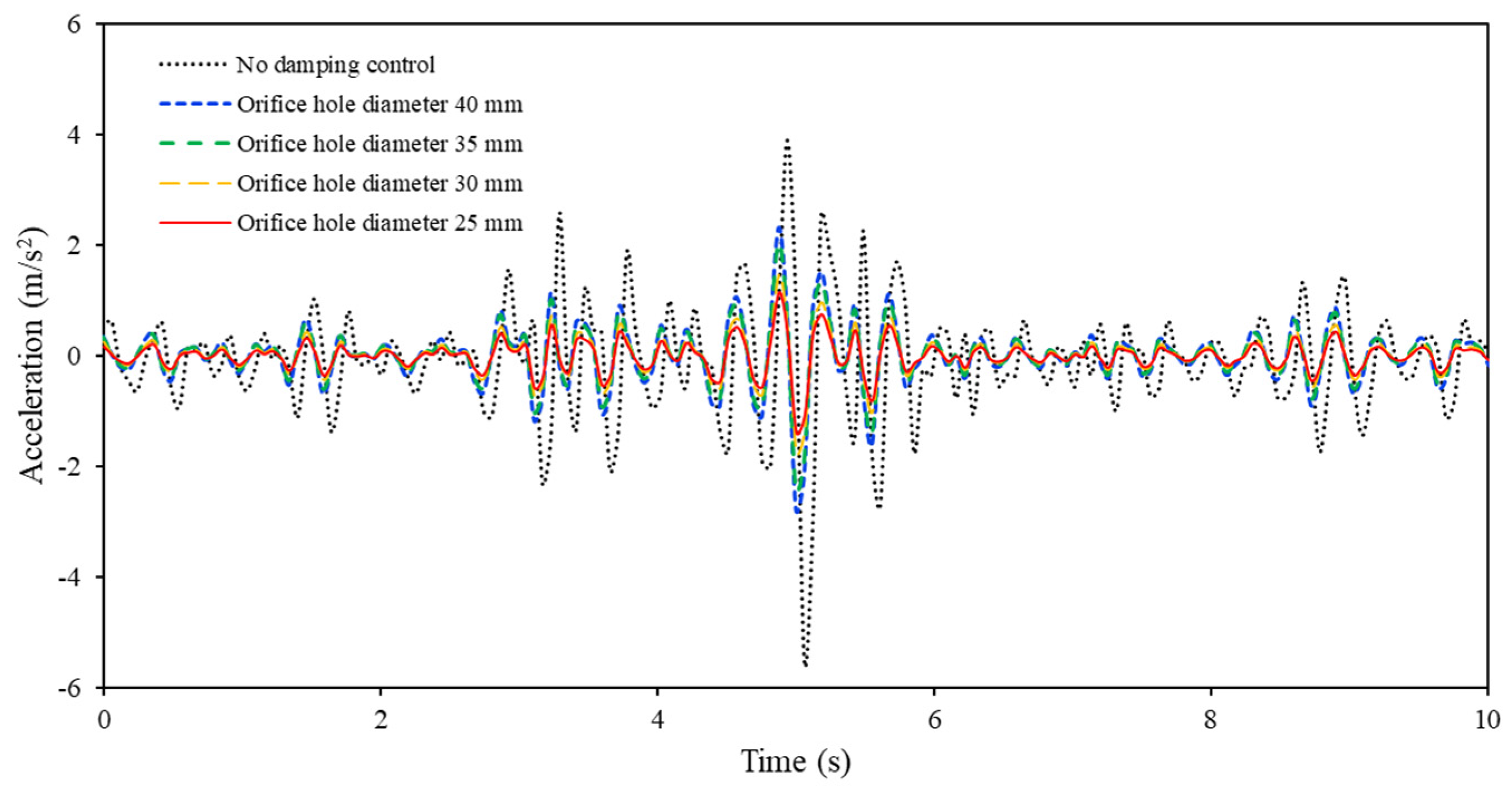
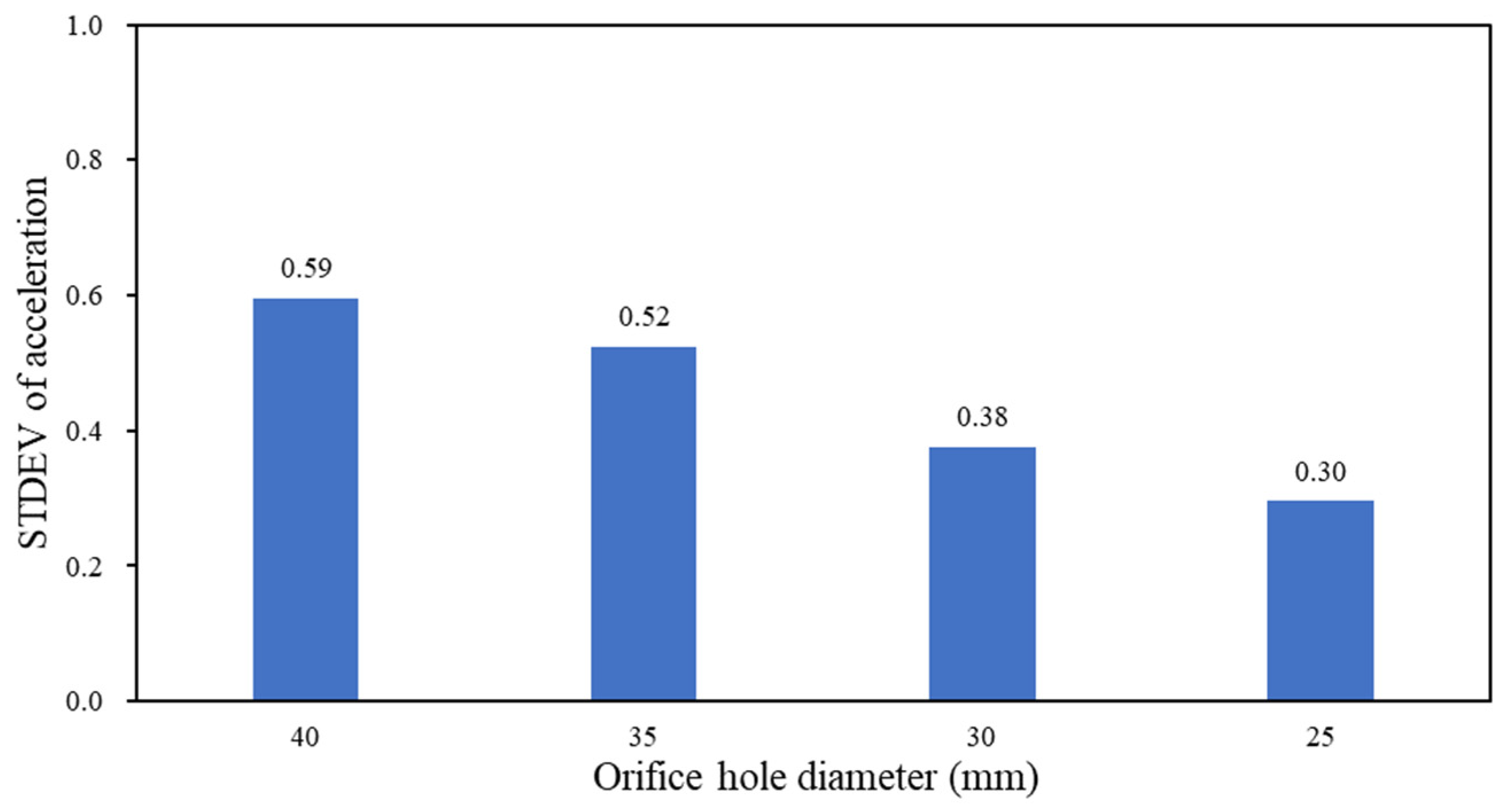
- The impact of orifice hole diameter, a critical design parameter of the bifurcated origami hydraulic damper, on damping performance was investigated experimentally. Collision-damping effectiveness decreased as the orifice hole diameter increased;
- (5)
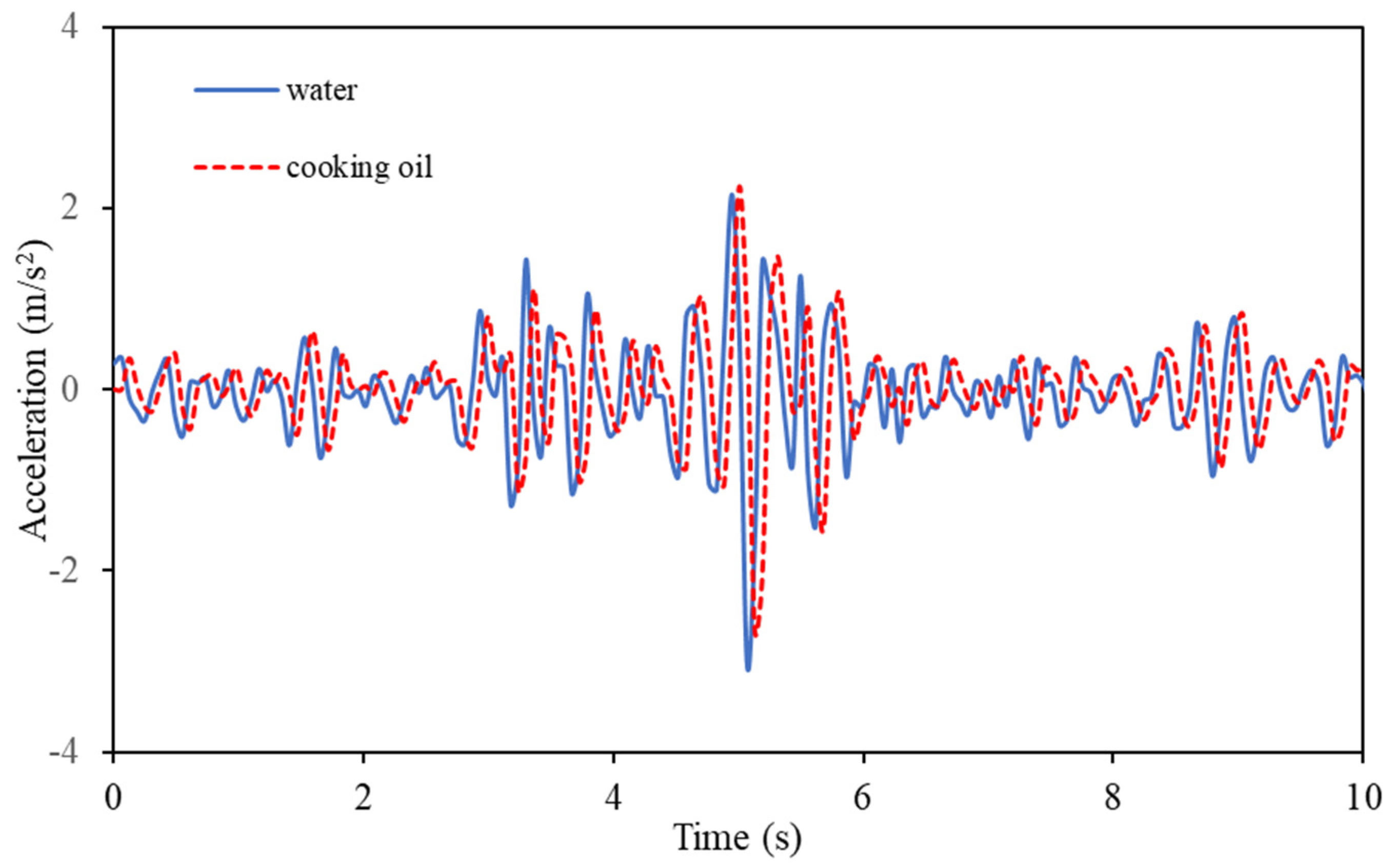
- Validation experiments examined the influence of hydraulic oil type and temperature within the bifurcated origami hydraulic damper. The effects of oil type and temperature on damping effectiveness were found to be 5.99% and 4.25%, respectively, indicating a relatively minor impact on collision-damping performance;
- (6)
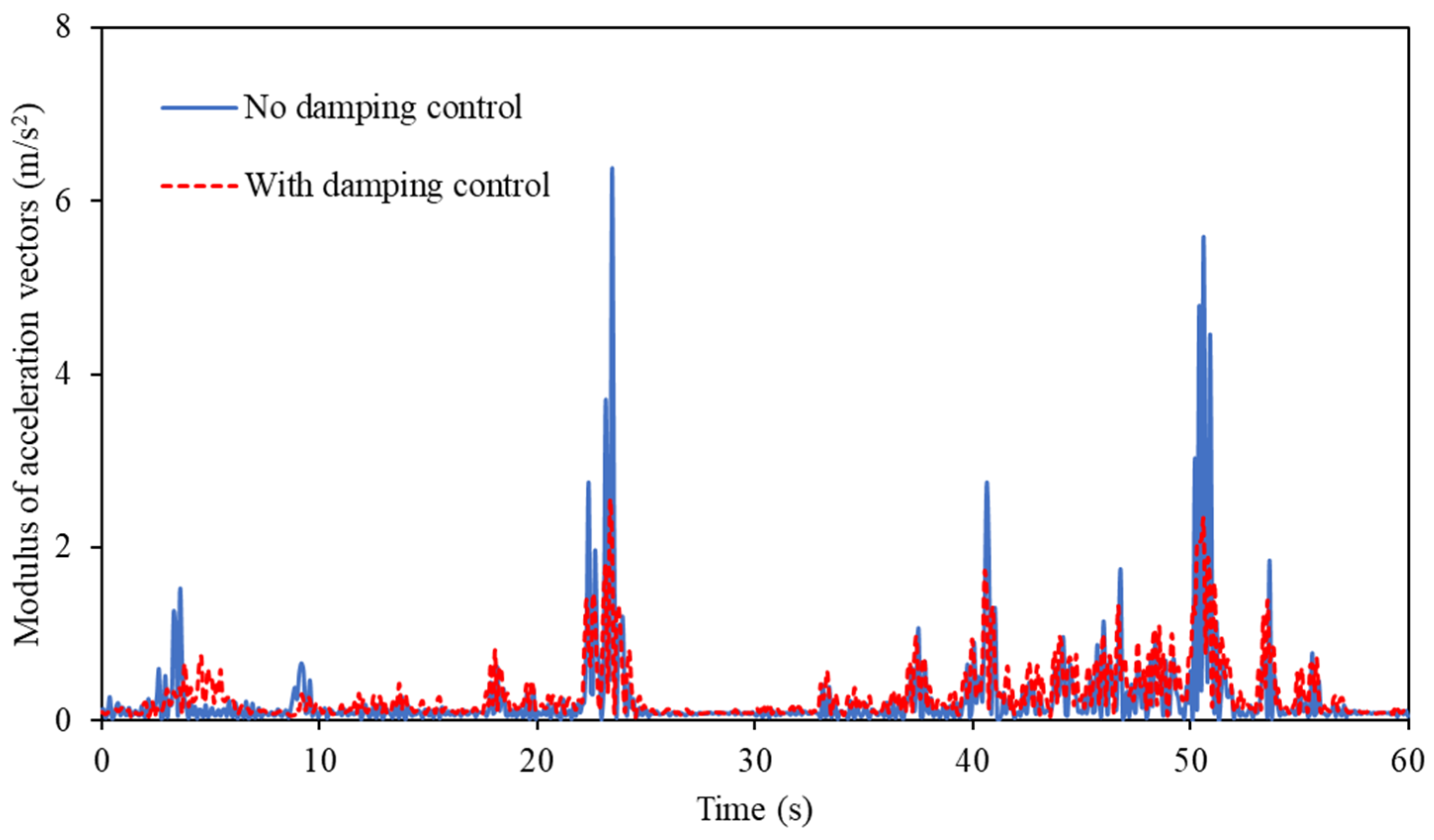
- The response acceleration values of the mass blocks were measured using a three-dimensional accelerometer under asymmetric vibration with off-center loads. It was observed that the standard deviation of the response acceleration values was reduced by 53.44% compared with those without oil injection. This finding highlights the effectiveness of the bifurcated origami hydraulic damper in managing vibrations in complex environments.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wu, Z.; Xu, G. Modeling and analysis of a hydraulic energy-harvesting shock absorber. Math. Probl. Eng. 2020, 2020, 1580297. [Google Scholar] [CrossRef]
- Wu, Z.; Xu, G.; Yang, H.; Li, M. Analysis of damping characteristics of a hydraulic shock absorber. Shock Vib. 2021, 2021, 8883024. [Google Scholar] [CrossRef]
- Rao, M.D.; Echempati, R.; Nadella, S. Dynamic analysis and damping of composite structures embedded with viscoelastic layers. Compos. Part B Eng. 1997, 28, 547–554. [Google Scholar] [CrossRef]
- Rikards, R.; Chate, A.; Barkanov, E. Finite element analysis of damping the vibrations of laminated composites. Comput. Struct. 1993, 47, 1005–1015. [Google Scholar] [CrossRef]
- Huang, Y.; Sturt, R.; Willford, M. A damping model for nonlinear dynamic analysis providing uniform damping over a frequency range. Comput. Struct. 2019, 212, 101–109. [Google Scholar] [CrossRef]
- Konieczny, Ł. Analysis of simplifications applied in vibration damping modelling for a passive car shock absorber. Shock. Vib. 2016, 2016, 6182847. [Google Scholar] [CrossRef]
- Burdzik, R.; Konieczny, Ł. Research on structure, propagation and exposure to general vibration in passenger car for different damping parameters. J. Vibroeng. 2013, 15, 1680–1688. [Google Scholar]
- Verros, G.; Natsiavas, S.; Stepan, G. Control and dynamics of quarter-car models with dual-rate damping. J. Vib. Control 2000, 6, 1045–1063. [Google Scholar] [CrossRef]
- Hemanth, K.; Kumar, H.; Gangadharan, K.V. Vertical dynamic analysis of a quarter car suspension system with MR damper. J. Braz. Soc. Mech. Sci. Eng. 2017, 39, 41–51. [Google Scholar] [CrossRef]
- Lafarge, B.; Cagin, S.; Curea, O.; Perret, A.H. From functional analysis to energy harvesting system design: Application to car suspension. Int. J. Interact. Des. Manuf. 2016, 10, 37–50. [Google Scholar] [CrossRef]
- Guntur, H.L.; Hendrowati, W.; Syuhri, S.N.H. Designing hydro-magneto-electric regenerative shock absorber for vehicle suspension considering conventional-viscous shock absorber performance. J. Mech. Sci. Technol. 2020, 34, 55–67. [Google Scholar] [CrossRef]
- Hu, G.; Yi, F.; Liu, H.; Zeng, L. Performance analysis of a novel magnetorheological damper with displacement self-sensing and energy harvesting capability. J. Vib. Eng. Technol. 2021, 9, 85–103. [Google Scholar] [CrossRef]
- Niu, M.; Jiang, H. Research on the Dynamic Model with Magnetorheological Damper. In Proceedings of the First Symposium on Aviation Maintenance and Management-Volume I; Springer: Berlin/Heidelberg, Germany, 2014; pp. 323–330. [Google Scholar]
- Go, C.-G.; Sui, C.-H.; Shih, M.-H.; Sung, W.-P. A Linearization Model for the Displacement Dependent Semi-active Hydraulic Damper. J. Vib. Control. 2010, 16, 2195–2214. [Google Scholar] [CrossRef]
- Azimi, M.; Rasoulnia, A.; Lin, Z.; Pan, H. Improved semi-active control algorithm for hydraulic damper-based braced buildings. Struct. Control Health Monit. 2017, 24, e1991. [Google Scholar] [CrossRef]
- Sui, C.; Go, C.; Shih, M.; Sung, W. Validity of the displacement dependent semi-active hydraulic damper used in a structure. J. Vib. Control 2011, 17, 579–587. [Google Scholar] [CrossRef]
- Lv, C.; Krishnaraju, D.; Konjevod, G.; Yu, H.; Jiang, H. Origami based Mechanical Metamaterials. Sci. Rep. 2014, 4, 5979. [Google Scholar] [CrossRef] [PubMed]
- Paula, Á.-G.; Domínguez, M. Origami. Deployable structures. Técnica Ind. 2023, 334, 50–57. [Google Scholar]
- Leanza, S.; Wu, S.; Sun, X.; Qi, H.J.; Zhao, R.R. Active Materials for Functional Origami. Adv. Mater. 2023, 36, 2302066. [Google Scholar] [CrossRef] [PubMed]
- Xi, K.; Chai, S.; Ma, J.; Chen, Y. Multi-Stability of the Extensible Origami Structures. Adv. Sci. 2023, 10, 2303454. [Google Scholar] [CrossRef] [PubMed]
- Kim, T.H.; Jang, K.I.; Lee, D.Y.; Han, J.H. Rigid-Foldable Polyhedral Origami. AIAA J. 2023, 61, 5645–5657. [Google Scholar] [CrossRef]
- Zhang, X.; Lu, G.; Wang, S.; Durandet, Y. Mechanical Characteristics of Graded Origami Bellows under Axial Tension. Front. Phys. 2023, 11, 1304426. [Google Scholar] [CrossRef]
- Huang, Z.; Wei, C.; Dong, L.; Wang, A.; Yao, H.; Guo, Z.; Mi, S. Fluid-driven hydrogel actuators with an origami structure. iScience 2022, 25, 104674. [Google Scholar] [CrossRef]
- Ye, S.; Zhao, P.; Zhao, Y.; Kavousi, F.; Feng, H.; Hao, G. A Novel Radially Closable Tubular Origami Structure (RC-ori) for Valves. Actuators 2022, 11, 243. [Google Scholar] [CrossRef]
- Lu, L.; Li, X. Ring origami spring capable of eversion morphing. J. Mech. Robot. 2024, 16, 081004-1. [Google Scholar]
- Hu, Q.; Li, J.; Tao, J.; Dong, E.; Sun, D. Inverse Origami Design Model for Soft Robotic Development. Soft Robot. 2023, 11, 131–139. [Google Scholar] [CrossRef]
- Li, Y.; Huang, H.; Li, B. Design of a Deployable Continuum Robot Using Elastic Kirigami-Origami. IEEE Robot. Autom. Lett. 2023, 8, 8382–8389. [Google Scholar] [CrossRef]
- Guan, J.; Zuo, J.; Zhao, W.; Gomi, N.; Zhao, X. Study on Hydraulic Dampers Using a Foldable Inverted Spiral Origami Structure. Vibration 2022, 5, 711–731. [Google Scholar] [CrossRef]
- Guan, J.; Yao, Y.; Zhao, W.; Hagiwara, I.; Zhao, X. Development of an Impact Energy Absorption Structure by an Arc Shape Stroke Origami Type Hydraulic Damper. Shock. Vib. 2023, 2023, 4578613. [Google Scholar] [CrossRef]
- Cengel, Y.A.; Cimbala, J.M. Fluid Mechanics: Fundamentals and Applications; McGraw-Hill: Noida, India, 2006. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Parameters |
|---|---|
| Spring K | 830 N/m |
| Mass block weight m | 1.62 kg |
| Average diameter of origami damper D | 45 mm |
| Orifice hole diameter do | 40 mm/35 mm/30 mm/25 mm |
| Orifice tube diameter dt | 12 mm |
| Oil tube length L | 350 mm |
| 0.005 | |
| Orifice flow coefficient c | 0.61 |
| 910 kg/m3 |
| Items | Parameters |
|---|---|
| FFT analyzer | Onosokki Corporation DS-3000 |
| Accelerometer | Onosokki NP-3572 |
| Shaker | San-Esu SSV-60S |
| Signal generator | NF Corporation WF1973 |
| Amplifier | San-Esu SVA-ST-30 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, J.; Zheng, B.; Li, Y.; Zhao, W.; Zhao, X. Research on Bifurcated Origami Hydraulic Dampers for Real Road Vibration Loads. Appl. Sci. 2024, 14, 6374. https://doi.org/10.3390/app14146374
Guan J, Zheng B, Li Y, Zhao W, Zhao X. Research on Bifurcated Origami Hydraulic Dampers for Real Road Vibration Loads. Applied Sciences. 2024; 14(14):6374. https://doi.org/10.3390/app14146374
Chicago/Turabian StyleGuan, Jingchao, Baoluo Zheng, Yalan Li, Wei Zhao, and Xilu Zhao. 2024. "Research on Bifurcated Origami Hydraulic Dampers for Real Road Vibration Loads" Applied Sciences 14, no. 14: 6374. https://doi.org/10.3390/app14146374
APA StyleGuan, J., Zheng, B., Li, Y., Zhao, W., & Zhao, X. (2024). Research on Bifurcated Origami Hydraulic Dampers for Real Road Vibration Loads. Applied Sciences, 14(14), 6374. https://doi.org/10.3390/app14146374