
POLIDriving: A Public-Access Driving Dataset for Road Traffic Safety Analysis

 ,
,  , ,
, ,  and
and
Abstract
1. Introduction
2. Related Work
3. Materials and Methods
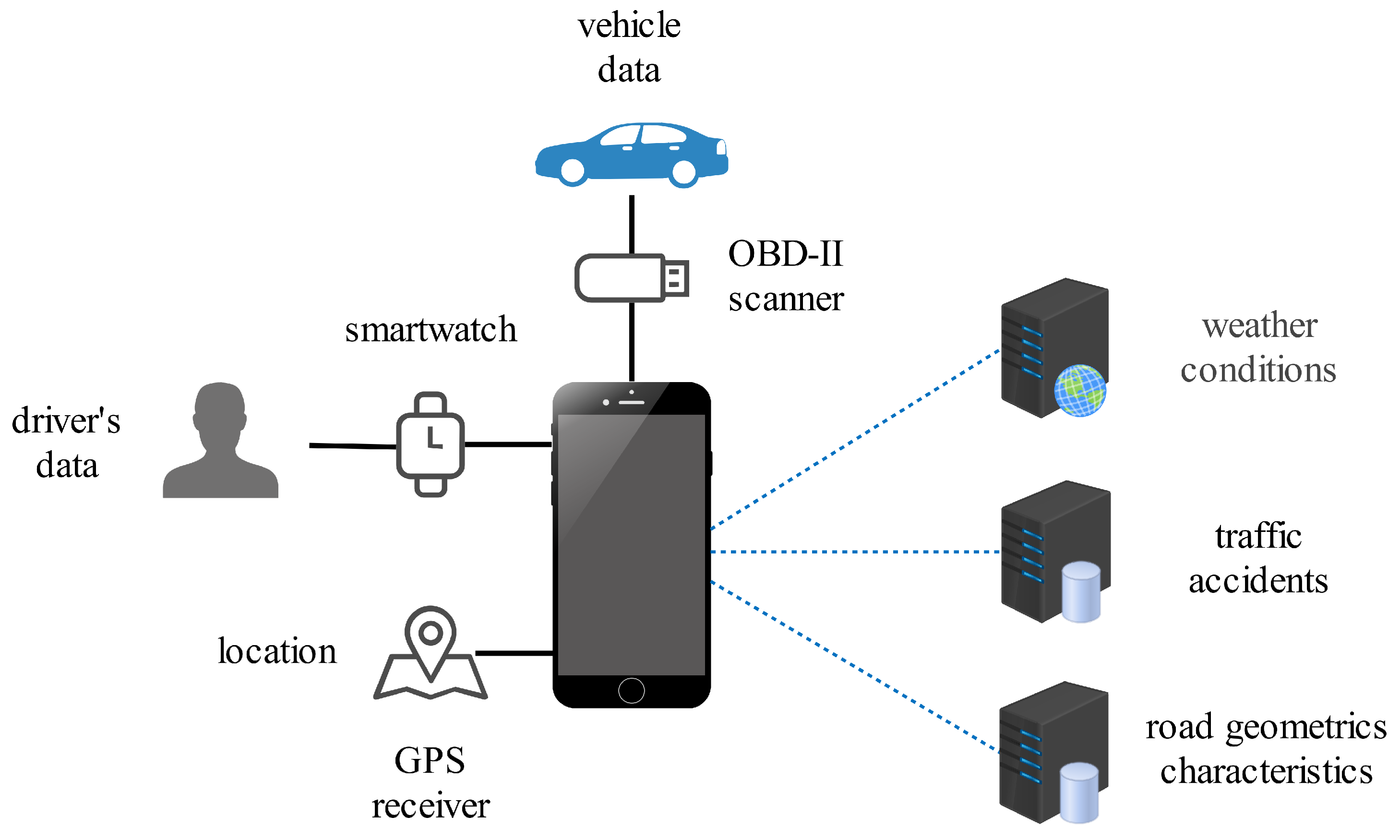
3.1. Acquisition Module
3.2. Drivers and Vehicles
- One woman and four men between 25 and 43 years old of different body constitutions, with or without medical conditions, traffic violations, and driving experience.
- Cross-Over Utility Vehicle (CUV), PICKUP, SEDAN-type vehicles of different brands, models, and different years of fabrication.
3.3. Devices and Services
3.4. Data Sources and Attributes
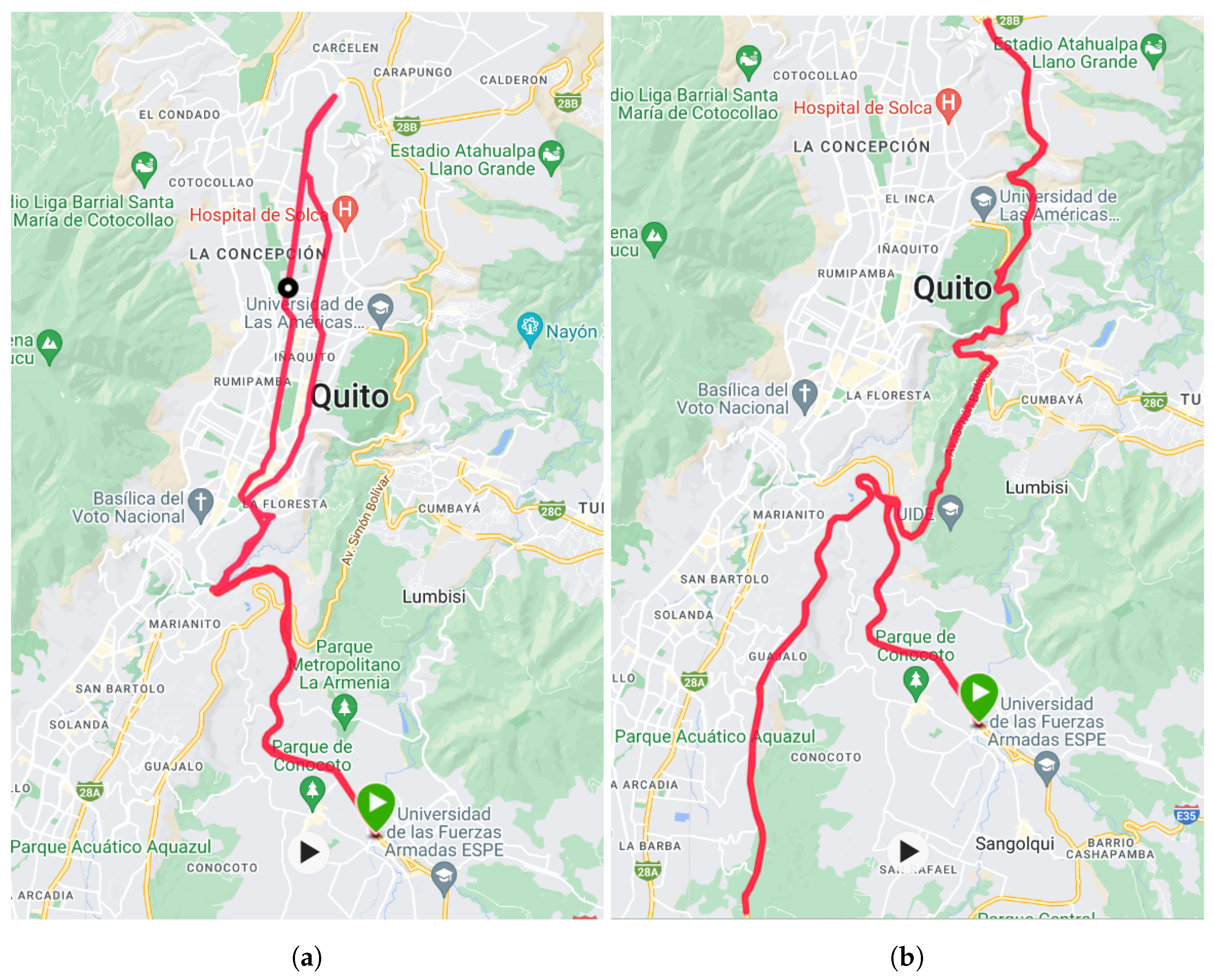
3.5. Routes and Timetables
- Route 1 is 59 km long that begins on the General Rumiñahui highway, crosses Velasco Ibarra, Ladrón de Guevara, Patria, 6 de Diciembre, and Galo Plaza Lasso avenues, returns by Galo Plaza Lasso, Amazonas, Patria, and Velasco Ibarra avenues, and finishes on the General Rumiñahui highway.
- Route 2 is 96 km long that begins on the General Rumiñahui highway, continues with the Simón Bolívar avenue in the south-north direction, returns by the Simón Bolívar in the north-south direction, and finishes on the General Rumiñahui.
3.6. Control Points
4. Results
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| LiDAR | Light Detection and Ranging |
| GNSS | Global Navigation Satellite System |
| OBD | On-Board Diagnostic |
| IMU | Inertial Measurement Unit |
| CAN | Controller Area Network |
| LP | Label Propagation |
| LS | Label Spreading |
| SVM | Support Vector Machine |
| MLP | Multilayer Perceptron |
| RF | Random Forest |
| GBM | Gradient Boosting Machine |
| SMOTE | Synthetic Minority Over-Sampling Technique |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Attribute | Item | ID | Value Range | Penalty |
|---|---|---|---|---|---|
| 1 | rpm | low | [0–1500] | 1 | |
| 2 | normal | [1501–3000] | 0 | ||
| 3 | high | [3001–5000] | 2 | ||
| 4 | very high | [5001–8000] | 3 | ||
| 5 | engine temperature | low | [0–82] | 1 | |
| 6 | normal | [83–94] | 0 | ||
| 7 | high | [95–104] | 1 | ||
| 8 | overheating | [105–200] | 2 | ||
| 9 | heart rate | bradicardia | [0–59] | 2 | |
| 10 | sinus zona a | [60–80] | 1 | ||
| 11 | sinus zona b | [81–100] | 2 | ||
| 12 | tachycardia slight | [101–120] | 3 | ||
| 13 | tachycardia severe | [121–180] | 4 | ||
| 14 | weather types | sunny | 1 | 1 | |
| 15 | mostly sunny | 2 | 1 | ||
| 16 | partly sunny | 3 | 1 | ||
| 17 | hazy sunshine | 5 | 1 | ||
| 18 | mostly cloudy | 6 | 2 | ||
| 19 | cloudy | 7 | 2 | ||
| 20 | clouds and sun | 9 | 2 | ||
| 21 | partly cloudy | 35 | 3 | ||
| 22 | fog | 11 | 3 | ||
| 23 | rain | 18 | 4 | ||
| 24 | visibility | bad | [0.0–0.0] | 4 | |
| 25 | poor | [0.1–2.4] | 3 | ||
| 26 | moderate | [2.5–10.0] | 2 | ||
| 27 | good | [10.1–50.0] | 1 | ||
| 28 | excellent | [50.1–100.0] | 0 | ||
| 29 | precipitation | none | [0.0–0.0] | 0 | |
| 30 | light | [0.1–2.4] | 1 | ||
| 31 | moderate | [2.5–10.0] | 2 | ||
| 32 | heavy | [10.1–50.0] | 3 | ||
| 33 | violent | [50.1–100.0] | 4 | ||
| 34 | accidents on site | none | [0–0] | 0 | |
| 35 | low | [1–8] | 1 | ||
| 36 | moderate | [9–30] | 2 | ||
| 37 | high | [31–132] | 3 | ||
| 38 | very high | [133–300] | 4 | ||
| 39 | design speed | normal | [0–0] | 0 | |
| 40 | slight | [1–10] | 1 | ||
| 41 | moderate | [11–20] | 2 | ||
| 42 | serious | [21–40] | 3 | ||
| 43 | very serious | [41–100] | 4 | ||
| 44 | accidents time | none | [0–0] | 0 | |
| 45 | low | [1–2] | 1 | ||
| 46 | moderate | [3–9] | 2 | ||
| 47 | high | [10–100] | 3 |
| Road ID | Segment | Starting Point | End Point | ||||
|---|---|---|---|---|---|---|---|
| ID | Latitude | Longitude | ID | Latitude | Longitude | ||
| AGR | S01 | P001 | −0.29755 | −78.46091 | P008 | −0.29065 | −78.46514 |
| AGR | S03 | P016 | −0.28166 | −78.47105 | P018 | −0.27999 | −78.47296 |
| AGR | S05 | P022 | −0.27837 | −78.48127 | P024 | −0.27687 | −78.48597 |
| AGR | S07 | P028 | −0.27093 | −78.48937 | P030 | −0.26995 | −78.48797 |
| AGR | S09 | P034 | −0.26585 | −78.48679 | P035 | −0.26472 | −78.4874 |
| AGR | S11 | P039 | −0.25961 | −78.48721 | P041 | −0.2572 | −78.48505 |
| AGR | S13 | P045 | −0.25224 | −78.48292 | P047 | −0.24996 | −78.48282 |
| AGR | S15 | P050 | −0.24518 | −78.48492 | P052 | −0.24281 | −78.48542 |
| AGR | S17 | P055 | −0.23902 | −78.48485 | P057 | −0.23649 | −78.48426 |
| AGR | S19 | P061 | −0.23038 | −78.48455 | P062 | −0.22925 | −78.485 |
| AGR | S21 | P066 | −0.2267 | −78.48815 | P069 | −0.2271 | −78.49302 |
| AGR | S23 | P073 | −0.22974 | −78.4974 | P076 | −0.23261 | −78.5013 |
| AVI | S25 | P079 | −0.23224 | −78.50294 | P085 | −0.22943 | −78.50077 |
| AVI | S27 | P096 | −0.22479 | −78.49702 | P104 | −0.22108 | −78.4952 |
| AVI | S29 | P112 | −0.21797 | −78.49151 | P121 | −0.21309 | −78.48891 |
| DMQ | S31 | P125 | −0.21252 | −78.48894 | P136 | −0.21047 | −78.49363 |
| DMQ | S33 | P142 | −0.20853 | −78.4953 | P155 | −0.20255 | −78.48677 |
| DMQ | S35 | P167 | −0.19188 | −78.48108 | P184 | −0.17915 | −78.47825 |
| DMQ | S37 | P203 | −0.16393 | −78.47518 | P212 | −0.15587 | −78.47696 |
| DMQ | S39 | P231 | −0.13687 | −78.47347 | P246 | −0.12179 | −78.47898 |
| DMQ | S41 | P252 | −0.10668 | −78.47647 | P256 | −0.10049 | −78.47192 |
| DMQ | S43 | P278 | −0.12921 | −78.48137 | P287 | −0.13844 | −78.48264 |
| DMQ | S45 | P304 | −0.15324 | −78.48467 | P309 | −0.15792 | −78.48439 |
| DMQ | S47 | P335 | −0.16911 | −78.48446 | P343 | −0.17452 | −78.48541 |
| DMQ | S49 | P356 | −0.18705 | −78.4876 | P363 | −0.19128 | −78.48837 |
| DMQ | S51 | P370 | −0.19677 | −78.4896 | P375 | −0.19962 | −78.49078 |
| DMQ | S53 | P385 | −0.20248 | −78.49399 | P392 | −0.20498 | −78.49547 |
| DMQ | S55 | P400 | −0.20767 | −78.49708 | P403 | −0.20847 | −78.49612 |
| DMQ | S57 | P408 | −0.20969 | −78.49451 | P413 | −0.21136 | −78.49354 |
| DMQ | S59 | P419 | −0.21286 | −78.49219 | P426 | −0.21485 | −78.49106 |
| AVI | S61 | P431 | −0.21767 | −78.49135 | P434 | −0.21874 | −78.49304 |
| AVI | S63 | P441 | −0.22278 | −78.4959 | P447 | −0.22604 | −78.49801 |
| AVI | S65 | P452 | −0.22743 | −78.50016 | P456 | −0.22973 | −78.50097 |
| AGR | S67 | P461 | −0.23214 | −78.50301 | P465 | −0.23355 | −78.50293 |
| AGR | S69 | P470 | −0.22983 | −78.49735 | P473 | −0.22788 | −78.49466 |
| AGR | S71 | P478 | −0.22679 | −78.48822 | P480 | −0.22803 | −78.48646 |
| AGR | S73 | P484 | −0.23039 | −78.48466 | P487 | −0.23437 | −78.48442 |
| AGR | S75 | P491 | −0.23897 | −78.48499 | P493 | −0.24082 | −78.48563 |
| AGR | S77 | P498 | −0.24522 | −78.48505 | P501 | −0.24799 | −78.48381 |
| AGR | S79 | P506 | −0.25222 | −78.48304 | P509 | −0.25514 | −78.4842 |
| AGR | S81 | P514 | −0.25952 | −78.4873 | P517 | −0.26273 | −78.48834 |
| AGR | S83 | P521 | −0.26591 | −78.48694 | P524 | −0.26888 | −78.48705 |
| AGR | S85 | P528 | −0.27084 | −78.48943 | P531 | −0.27565 | −78.48944 |
| AGR | S87 | P536 | −0.27851 | −78.48131 | P539 | −0.27954 | −78.47542 |
| AGR | S89 | P544 | −0.28173 | −78.47117 | P550 | −0.28893 | −78.46642 |
| Road ID | Segment | Starting Point | End Point | ||||
|---|---|---|---|---|---|---|---|
| ID | Latitude | Longitude | ID | Latitude | Longitude | ||
| AGR | S001 | P001 | −0.29755 | −78.46091 | P008 | −0.29065 | −78.46514 |
| AGR | S003 | P016 | −0.28166 | −78.47105 | P018 | −0.27999 | −78.47296 |
| AGR | S005 | P022 | −0.27837 | −78.48127 | P024 | −0.27687 | −78.48597 |
| AGR | S007 | P028 | −0.27093 | −78.48937 | P030 | −0.26995 | −78.48797 |
| AGR | S009 | P034 | −0.26585 | −78.48679 | P035 | −0.26472 | −78.4874 |
| AGR | S011 | P039 | −0.25961 | −78.48721 | P041 | −0.2572 | −78.48505 |
| AGR | S013 | P045 | −0.25224 | −78.48292 | P047 | −0.24996 | −78.48282 |
| AGR | S015 | P050 | −0.24518 | −78.48492 | P052 | −0.24281 | −78.48542 |
| ASB | S017 | P055 | −0.23945 | −78.48496 | P059 | −0.24315 | −78.48256 |
| ASB | S019 | P063 | −0.24625 | −78.47657 | P065 | −0.24202 | −78.47433 |
| ASB | S021 | P069 | −0.23615 | −78.47298 | P071 | −0.2347 | −78.47095 |
| ASB | S023 | P074 | −0.23041 | −78.46985 | P075 | −0.22942 | −78.46914 |
| ASB | S025 | P081 | −0.21675 | −78.46567 | P082 | −0.21539 | −78.46449 |
| ASB | S027 | P085 | −0.21146 | −78.46253 | P087 | −0.20665 | −78.46084 |
| ASB | S029 | P090 | −0.20322 | −78.45855 | P092 | −0.20021 | −78.45669 |
| ASB | S031 | P095 | −0.19828 | −78.46070 | P096 | −0.19839 | −78.46164 |
| ASB | S033 | P099 | −0.19860 | −78.46491 | P100 | −0.19808 | −78.46644 |
| ASB | S035 | P104 | −0.19546 | −78.46405 | P106 | −0.19399 | −78.46052 |
| ASB | S037 | P109 | −0.19199 | −78.45866 | P110 | −0.19187 | −78.45795 |
| ASB | S039 | P116 | −0.18772 | −78.45412 | P118 | −0.18511 | −78.45273 |
| ASB | S041 | P121 | −0.18184 | −78.45117 | P122 | −0.18123 | −78.45135 |
| ASB | S043 | P126 | −0.18105 | −78.45391 | P127 | −0.18037 | −78.45582 |
| ASB | S045 | P132 | −0.17279 | −78.45193 | P134 | −0.16996 | −78.44987 |
| ASB | S047 | P137 | −0.16384 | −78.44792 | P139 | −0.16106 | −78.44722 |
| ASB | S049 | P143 | −0.15681 | −78.44634 | P145 | −0.15338 | −78.44721 |
| ASB | S051 | P148 | −0.15191 | −78.45150 | P149 | −0.15133 | −78.45193 |
| ASB | S053 | P152 | −0.14980 | −78.45068 | P153 | −0.14874 | −78.44897 |
| ASB | S055 | P156 | −0.14762 | −78.44748 | P158 | −0.14553 | −78.44521 |
| ASB | S057 | P162 | −0.14044 | −78.44466 | P165 | −0.13719 | −78.44722 |
| ASB | S059 | P169 | −0.12963 | −78.44828 | P170 | −0.12791 | −78.44828 |
| ASB | S061 | P173 | −0.11840 | −78.45088 | P176 | −0.11325 | −78.45675 |
| ASB | S063 | P179 | −0.11025 | −78.45799 | P181 | −0.10953 | −78.45877 |
| ASB | S065 | P184 | −0.11193 | −78.45749 | P185 | −0.11529 | −78.45485 |
| ASB | S067 | P188 | −0.11850 | −78.45096 | P189 | −0.1214 | −78.44807 |
| ASB | S069 | P192 | −0.12649 | −78.44817 | P194 | −0.12866 | −78.44853 |
| ASB | S071 | P197 | −0.13510 | −78.44764 | P199 | −0.13834 | −78.44709 |
| ASB | S073 | P202 | −0.14055 | −78.44478 | P204 | −0.14354 | −78.44382 |
| ASB | S075 | P209 | −0.14750 | −78.44751 | P210 | −0.14772 | −78.44819 |
| ASB | S077 | P215 | −0.15078 | −78.45246 | P216 | −0.15157 | −78.45197 |
| ASB | S079 | P219 | −0.15268 | −78.44880 | P220 | −0.15434 | −78.44667 |
| ASB | S081 | P223 | −0.16034 | −78.44692 | P226 | −0.16671 | −78.44792 |
| ASB | S083 | P232 | −0.17604 | −78.45459 | P233 | −0.17624 | −78.45568 |
| ASB | S085 | P236 | −0.17890 | −78.45535 | P238 | −0.18152 | −78.45518 |
| ASB | S087 | P241 | −0.18048 | −78.45218 | P243 | −0.18321 | −78.45104 |
| ASB | S089 | P246 | −0.18528 | −78.45344 | P247 | −0.18683 | −78.45409 |
| ASB | S091 | P252 | −0.19196 | −78.45678 | P256 | −0.19365 | −78.46142 |
| ASB | S093 | P262 | −0.19875 | −78.46491 | P268 | −0.20245 | −78.45792 |
| ASB | S095 | P274 | −0.20831 | −78.46164 | P276 | −0.2107 | −78.46236 |
| ASB | S097 | P279 | −0.21265 | −78.46373 | P280 | −0.21386 | −78.46407 |
| ASB | S099 | P283 | −0.21886 | −78.46671 | P285 | −0.22464 | −78.4689 |
| ASB | S101 | P288 | −0.23032 | −78.46996 | P289 | −0.23107 | −78.47046 |
| ASB | S103 | P294 | −0.23612 | −78.47313 | P301 | −0.24518 | −78.47624 |
| ASB | S105 | P306 | −0.24405 | −78.48218 | P307 | −0.2426 | −78.48259 |
| ASB | S107 | P315 | −0.23294 | −78.48880 | P316 | −0.2324 | −78.48933 |
| ASB | S109 | P319 | −0.23372 | −78.49296 | P320 | −0.23427 | −78.49205 |
| ASB | S111 | P325 | −0.23918 | −78.49250 | P326 | −0.23962 | −78.49314 |
| ASB | S113 | P329 | −0.24229 | −78.49592 | P331 | −0.24285 | −78.49992 |
| ASB | S115 | P334 | −0.24686 | −78.50143 | P336 | −0.24954 | −78.50271 |
| ASB | S117 | P340 | −0.25545 | −78.50350 | P341 | −0.25677 | −78.50286 |
| ASB | S119 | P344 | −0.26252 | −78.50514 | P345 | −0.26535 | −78.50739 |
| ASB | S121 | P348 | −0.26910 | −78.50768 | P350 | −0.2717 | −78.50844 |
| ASB | S123 | P353 | −0.27629 | −78.51247 | P357 | −0.28423 | −78.51812 |
| ASB | S125 | P360 | −0.28624 | −78.51907 | P362 | −0.28904 | −78.51979 |
| ASB | S127 | P369 | −0.30256 | −78.52161 | P377 | −0.31294 | −78.52237 |
| ASB | S129 | P383 | −0.32332 | −78.52019 | P384 | −0.3278 | −78.5191 |
| ASB | S131 | P388 | −0.33475 | −78.52013 | P390 | −0.33721 | −78.52059 |
| ASB | S133 | P393 | −0.34284 | −78.52297 | P396 | −0.34739 | −78.52354 |
| ASB | S135 | P399 | −0.34887 | −78.52331 | P403 | −0.35486 | −78.5252 |
| ASB | S137 | P409 | −0.35741 | −78.53344 | P410 | −0.35913 | −78.53468 |
| ASB | S139 | P414 | −0.36507 | −78.52912 | P415 | −0.36585 | −78.52861 |
| ASB | S141 | P428 | −0.38228 | −78.53171 | P432 | −0.38417 | −78.5321 |
| ASB | S143 | P437 | −0.37681 | −78.53043 | P444 | −0.36893 | −78.52879 |
| ASB | S145 | P449 | −0.36497 | −78.52902 | P452 | −0.36132 | −78.53296 |
| ASB | S147 | P456 | −0.35756 | −78.53338 | P457 | −0.35719 | −78.53073 |
| ASB | S148 | P458 | −0.35664 | −78.52849 | P459 | −0.35615 | −78.52749 |
| ASB | S149 | P460 | −0.35530 | −78.52579 | P463 | −0.35066 | −78.52291 |
| ASB | S151 | P466 | −0.34804 | −78.52329 | P468 | −0.3455 | −78.52364 |
| ASB | S153 | P473 | −0.33478 | −78.51997 | P475 | −0.33226 | −78.51952 |
| ASB | S155 | P480 | −0.32329 | −78.52007 | P483 | −0.31841 | −78.52146 |
| ASB | S157 | P491 | −0.30257 | −78.52146 | P496 | −0.29606 | −78.52032 |
| ASB | S159 | P499 | −0.29047 | −78.51954 | P501 | −0.28754 | −78.51955 |
| ASB | S161 | P504 | −0.28501 | −78.51836 | P509 | −0.27542 | −78.51148 |
| ASB | S163 | P512 | −0.26912 | −78.50753 | P513 | −0.26859 | −78.50741 |
| ASB | S165 | P516 | −0.26259 | −78.50504 | P518 | −0.25822 | −78.50242 |
| ASB | S167 | P521 | −0.25015 | −78.50296 | P522 | −0.24903 | −78.50217 |
| ASB | S169 | P525 | −0.24465 | −78.50078 | P528 | −0.24266 | −78.4972 |
| ASB | S171 | P531 | −0.24073 | −78.49421 | P532 | −0.23996 | −78.4934 |
| ASB | S173 | P538 | −0.23428 | −78.49155 | P539 | −0.23394 | −78.49249 |
| ASB | S175 | P542 | −0.23151 | −78.49158 | P543 | −0.2319 | −78.49016 |
| AGR | S177 | P552 | −0.24168 | −78.4858 | P555 | −0.24447 | −78.48527 |
| AGR | S179 | P560 | −0.24873 | −78.48341 | P563 | −0.25167 | −78.4829 |
| AGR | S181 | P568 | −0.25581 | −78.48447 | P571 | −0.25897 | −78.48675 |
| AGR | S183 | P576 | −0.26355 | −78.48809 | P578 | −0.26529 | −78.48724 |
| AGR | S185 | P583 | −0.26953 | −78.4876 | P585 | −0.27054 | −78.48902 |
| AGR | S187 | P590 | −0.27625 | −78.48834 | P593 | −0.27811 | −78.48255 |
| AGR | S189 | P598 | −0.27964 | −78.47458 | P601 | −0.28115 | −78.4716 |
| AGR | S191 | P609 | −0.29028 | −78.46552 | P615 | −0.29759 | −78.46097 |
References
- World Health Organization. WHO Global Status Report on Road Safety 2023; WHO: Geneva, Switzerland, 2023. [Google Scholar]
- Marcillo, P.; Valdivieso Caraguay, Á.L.; Hernández-Álvarez, M. A Systematic Literature Review of Learning-Based Traffic Accident Prediction Models Based on Heterogeneous Sources. Appl. Sci. 2022, 12, 4529. [Google Scholar] [CrossRef]
- Geyer, J.; Kassahun, Y.; Mahmudi, M.; Ricou, X.; Durgesh, R.; Chung, A.S.; Hauswald, L.; Pham, V.H.; Mühlegg, M.; Dorn, S.; et al. A2d2: Audi autonomous driving dataset. arXiv 2020, arXiv:2004.06320. [Google Scholar]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets robotics: The kitti dataset. Int. J. Robot. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef]
- Yu, F.; Chen, H.; Wang, X.; Xian, W.; Chen, Y.; Liu, F.; Madhavan, V.; Darrell, T. Bdd100k: A diverse driving dataset for heterogeneous multitask learning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, WA, USA, 14–19 June 2020; pp. 2636–2645. [Google Scholar]
- Huang, X.; Wang, P.; Cheng, X.; Zhou, D.; Geng, Q.; Yang, R. The apolloscape open dataset for autonomous driving and its application. IEEE Trans. Pattern Anal. Mach. Intell. 2019, 42, 2702–2719. [Google Scholar] [CrossRef] [PubMed]
- Santana, E.; Hotz, G. Learning a driving simulator. arXiv 2016, arXiv:1608.01230. [Google Scholar]
- Schafer, H.; Santana, E.; Haden, A.; Biasini, R. A commute in data: The comma2k19 dataset. arXiv 2018, arXiv:1812.05752. [Google Scholar]
- Izquierdo, R.; Quintanar, A.; Parra, I.; Fernández-Llorca, D.; Sotelo, M. The prevention dataset: A novel benchmark for prediction of vehicles intentions. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 3114–3121. [Google Scholar]
- Weber, M. Automotive OBD-II Dataset. 2023. Available online: https://radar.kit.edu/radar/en/dataset/bCtGxdTklQlfQcAq (accessed on 27 April 2024).
- Veepeak. OBDCheck BLE+. Available online: https://www.veepeak.com/product/obdcheck-ble-plus/ (accessed on 27 April 2024).
- Garmin. Vivosmart 5. Available online: https://www.garmin.com/en-US/p/782585 (accessed on 27 April 2024).
- ISO 11898-1:2015; Road Vehicles—Controller Area Network (CAN). Part 1: Data Link Layer and Physical Signalling. International Organization for Standardization: Geneva, Switzerland, 2015. Available online: https://www.iso.org/standard/63648.html (accessed on 27 April 2024).
- ISO 14230-1:2012; Road Vehicles—Diagnostic Communication over K-Line (DoK-Line). International Organization for Standardization: Geneva, Switzerland, 2012. Available online: https://www.iso.org/standard/55591.html (accessed on 27 April 2024).
- ISO 9141-2:1994; Road Vehicles—Diagnostic Systems. Part 2: CARB Requirements for Interchange of Digital Information. International Organization for Standardization: Geneva, Switzerland, 1994. Available online: https://www.iso.org/standard/16738.html (accessed on 27 April 2024).
- J1850_202212; Class B Data Communications Network Interface (STABILIZED Dec 2022). SAE International: Warrendale, PA, USA, 2022. Available online: https://www.sae.org/standards/content/j1850_202212/ (accessed on 27 April 2024).
- Accuweather. Accuweather. Available online: https://www.accuweather.com/ (accessed on 27 April 2024).
- Transit National Agency (ANT). National Accident Rate Viewer. Available online: https://www.ant.gob.ec/visor-de-siniestralidad-estadisticas/ (accessed on 27 April 2024).
- Yan, Y.; Zhang, Y.; Yang, X.; Hu, J.; Tang, J.; Guo, Z. Crash prediction based on random effect negative binomial model considering data heterogeneity. Phys. A Stat. Mech. Its Appl. 2020, 547, 123858. [Google Scholar] [CrossRef]
- Bao, J.; Liu, P.; Ukkusuri, S.V. A spatiotemporal deep learning approach for citywide short-term crash risk prediction with multi-source data. Accid. Anal. Prev. 2019, 122, 239–254. [Google Scholar] [CrossRef] [PubMed]
- Heredia Silva, C.A. Desarrollo de potenciales aplicaciones móviles aplicables al estudio de velocidades seguras en vías. Caso de estudio: Avenida Simón Bolívar. Bachelor’s Thesis, PUCE-Quito, Quito, Ecuador, 2019. [Google Scholar]
- Pablo Marcillo. POLIDriving. Available online: https://github.com/laboratorioAI/polidriving (accessed on 27 April 2024).
- Chawla, N.V.; Bowyer, K.W.; Hall, L.O.; Kegelmeyer, W.P. SMOTE: Synthetic minority over-sampling technique. J. Artif. Intell. Res. 2002, 16, 321–357. [Google Scholar] [CrossRef]
- Shahverdy, M.; Fathy, M.; Berangi, R.; Sabokrou, M. Driver behavior detection and classification using deep convolutional neural networks. Expert Syst. Appl. 2020, 149, 113240. [Google Scholar] [CrossRef]
- Kovaceva, J.; Isaksson-Hellman, I.; Murgovski, N. Identification of aggressive driving from naturalistic data in car-following situations. J. Saf. Res. 2020, 73, 225–234. [Google Scholar] [CrossRef] [PubMed]

| Authors | Name | Duration | Frequency of Acquisition | Drivers | Vehicles | Sensors/Devices | Applications | |
|---|---|---|---|---|---|---|---|---|
| [h] | [Hz] | Auton. Driving | Driving Behavior | |||||
| Santana et al. [7] | comma.ai | 7.25 | pictures at 20 and measures at 100 | 3 | 1 | 1 frontal camera, 1 LiDAR sensor, and 1 POS device | ✔ | ✔ |
| Shafer et al. [8] | comma2k19 | 33 | pictures at 20 and measures at 10 | 1 | 2 | 2 frontal cameras, 1 internal camera, 1 OBD-II scanner, 1 GNSS receiver, and 1 9-axis IMU device | ✔ | ✔ |
| Izquierdo et al. [9] | PREVENTION | 6 | laser at 10, radars at 33, and location receiver at 20 | 3 | 1 | 1 frontal camera, 1 rear-facing camera, 1 LiDAR sensor, 3 long-range radars, 1 GNSS receiver, and 1 CAN bus scanner | ✔ | ✔ |
| Weber et al. [10] | AUTOMOTIVE OBD-II | 6 | measures at 10 | 1 | 10 | 1 OBD-II scanner | - | ✔ |
| Geyer et al. [3] | A2D2 | - | not mentioned | 1 | 1 | 6 cameras, 6 LiDAR sensors, 1 GPS, 1 IMU, and 1 bus scanner | ✔ | ✔ |
| Marcillo et al. | POLIDriving | 18 | measures at 1 | 5 | 4 | 1 OBD-II scanner, 1 GPS receiver, and 1 health monitor | - | ✔ |
| Name | Datasources | No. Attributes | Data Labeling | No. Classes | |||||
|---|---|---|---|---|---|---|---|---|---|
|
Driver’s Data |
Vehicle Data |
Weather Conditions |
Traffic Accidents |
Geometric Charact. |
Road Conditions | ||||
| comma.ai | - | ✔ | - | - | - | ✔ 1 | 40 | - | - |
| comma2k19 | - | ✔ | - | - | - | ✔ 1 | ≈45 | - | - |
| PREVENTION | - | ✔ | - | - | - | ✔ 1 | 31 | ✔ | - |
| AUTOMOTIVE OBD-II | - | ✔ | - | - | - | - | 11 | - | - |
| A2D2 | - | ✔ | - | - | - | ✔ 1 | 22 | - | - |
| POLIDriving | ✔ | ✔ | ✔ | ✔ | ✔ | - | 32 | ✔ 2 | 4 |
| ID | Name | Gender | Age [Years] | Weight [kg] | Height [cm] | Medical Conditions | Driver’s License Points [/30] | Driving Experience [Years] |
|---|---|---|---|---|---|---|---|---|
| 1 | Pablo | Male | 40 | 59 | 165 | None | 30 | 13 |
| 2 | Andres | Male | 25 | 69 | 163 | None | 30 | 7 |
| 3 | Richard | Male | 37 | 74 | 170 | None | 30 | 19 |
| 4 | Alonso | Male | 43 | 77 | 170 | None | 30 | 20 |
| 5 | Yolanda | Female | 43 | 62 | 155 | None | 30 | 23 |
| ID | Brand | Model | Type | Year Manufacture | Kilometers Travelled [×1000] | Last Maintenance [Year] | Number Airbags |
|---|---|---|---|---|---|---|---|
| 1 | Kia | Sportage | CUV | 2018 | 31 | 2023 | 2 |
| 2 | Kia | Soluto | Sedan | 2022 | 75 | 2022 | 2 |
| 3 | Chevrolet | DMAX | Pickup | 2013 | 350 | 2023 | 2 |
| 4 | Chevrolet | Cavalier | Sedan | 2018 | 160 | 2021 | 2 |
| # | Attribute | Class | Units | Data Source | Sensor/Device |
|---|---|---|---|---|---|
| 1 | time | Timestamp | Vehicle data | GPS receiver | |
| 2 | speed | Numeric | km/h | OBD-II scanner | |
| 3 | revolutions per minute | Numeric | rpm | OBD-II scanner | |
| 4 | acceleration | Numeric | m/s2 | OBD-II scanner | |
| 5 | throttle position | Numeric | % | OBD-II scanner | |
| 6 | engine temperature | Numeric | °C | OBD-II scanner | |
| 7 | system voltage | Numeric | volts | OBD-II scanner | |
| 8 | distance traveled | Numeric | km | OBD-II scanner | |
| 9 | engine load value 1 | Numeric | % | OBD-II scanner | |
| 10 | latitude | Numeric | GPS receiver | ||
| 11 | longitude | Numeric | GPS receiver | ||
| 12 | altitude | Numeric | m | GPS receiver | |
| 13 | id vehicle | Numeric | Database | ||
| 14 | heart rate | Numeric | bpm | Driver’s data | Health monitor |
| 15 | body temperature | Numeric | °C | Health monitor | |
| 16 | id driver | Numeric | Database | ||
| 17 | current weather | Categorical | Weather data | Web service | |
| 18 | has precipitation | Boolean | Web service | ||
| 19 | is day time | Boolean | Web service | ||
| 20 | temperature | Numeric | °C | Web service | |
| 21 | wind speed | Numeric | km/h | Web service | |
| 22 | wind direction | Numeric | Web service | ||
| 23 | relative humidity | Numeric | % | Web service | |
| 24 | visibility | Numeric | km | Web service | |
| 25 | uv index 2 | Numeric | Web service | ||
| 26 | cloud cover | Numeric | Web service | ||
| 27 | ceiling 3 | Numeric | m | Web service | |
| 28 | pressure | Numeric | mb | Web service | |
| 29 | precipitation | Numeric | mm | Web service | |
| 30 | accidents on site | Numeric | number | Traffic accidents | Database |
| 31 | design speed | Numeric | km/h | Road geometrics characteristics | Database |
| 32 | accidents time | Numeric | number | Traffic accidents | Database |
| Route | Road ID | Segment | Starting Point | End Point | ||||
|---|---|---|---|---|---|---|---|---|
| ID | Latitude | Longitude | ID | Latitude | Longitude | |||
| 1 | AGR | S01 | P001 | −0.29755 | −78.46091 | P008 | −0.29065 | −78.46514 |
| AGR | S21 | P066 | −0.2267 | −78.48815 | P069 | −0.2271 | −78.49302 | |
| DMQ | S41 | P252 | −0.10668 | −78.47647 | P256 | −0.10049 | −78.47192 | |
| AVI | S61 | P431 | −0.21767 | −78.49135 | P434 | −0.21874 | −78.49304 | |
| AGR | S89 | P544 | −0.28173 | −78.47117 | P550 | −0.28893 | −78.46642 | |
| 2 | AGR | S001 | P001 | −0.29755 | −78.46091 | P008 | −0.29065 | −78.46514 |
| ASB | S041 | P121 | −0.18184 | −78.45117 | P122 | −0.18123 | −78.45135 | |
| ASB | S081 | P223 | −0.16034 | −78.44692 | P226 | −0.16671 | −78.44792 | |
| ASB | S121 | P348 | −0.26910 | −78.50768 | P350 | −0.2717 | −78.50844 | |
| ASB | S173 | P538 | −0.23428 | −78.49155 | P539 | −0.23394 | −78.49249 | |
| Time | Speed | rpm | Acceleration | Throttle Position | Engine Temperature | System Voltage | Distance Travelled | Engine Load Value |
|---|---|---|---|---|---|---|---|---|
| 15:33:15 | 65 | 2306 | −0.7279 | 26.2745 | 97 | 12.6 | 18.4204 | 17.6470 |
| 15:33:16 | 62 | 2246 | −0.7488 | 32.9411 | 97 | 12.6 | 18.4346 | 47.0588 |
| 15:33:17 | 61 | 2217 | −0.2281 | 36.4705 | 97 | 12.6 | 18.4452 | 49.4117 |
| 15:33:18 | 61 | 2201 | 0.0 | 40.0 | 96 | 12.6 | 18.4673 | 65.0980 |
| 15:33:19 | 61 | 2225 | 0.0 | 72.5490 | 96 | 12.6 | 18.4788 | 76.8627 |
| 15:33:20 | 62 | 2258 | 0.0 | 81.9607 | 96 | 12.7 | 18.4992 | 80.7843 |
| Time | Altitude | id Vehicle | Latitude | Longitude | id Driver | Heart Rate | Body Temperature | Current Weather |
| 15:33:15 | 2586.61 | 4 | −0.195041 | −78.463115 | 4 | 64 | 29 | Clouds and sun |
| 15:33:16 | 2587.17 | 4 | −0.194989 | −78.462963 | 4 | 64 | 29 | Clouds and sun |
| 15:33:17 | 2587.40 | 4 | −0.19493 | −78.462816 | 4 | 64 | 29 | Clouds and sun |
| 15:33:18 | 2588.94 | 4 | −0.194862 | −78.462684 | 4 | 64 | 29 | Clouds and sun |
| 15:33:19 | 2589.78 | 4 | −0.194783 | −78.46256 | 4 | 64 | 29 | Clouds and sun |
| 15:33:20 | 2590.04 | 4 | −0.194683 | −78.462441 | 4 | 64 | 29 | Clouds and sun |
| Time | Has Precipitation | Is Day Time | Temperature | Wind Speed | Wind Direction | Relative Humidity | Visibility | uv Index |
| 15:33:15 | FALSE | TRUE | 19.5 | 14.5 | 0 | 62 | 8 | 2 |
| 15:33:16 | FALSE | TRUE | 19.5 | 14.5 | 0 | 62 | 8 | 2 |
| 15:33:17 | FALSE | TRUE | 19.5 | 14.5 | 0 | 62 | 8 | 2 |
| 15:33:18 | FALSE | TRUE | 19.5 | 14.5 | 0 | 62 | 8 | 2 |
| 15:33:19 | FALSE | TRUE | 19.5 | 14.5 | 0 | 62 | 8 | 2 |
| 15:33:20 | FALSE | TRUE | 19.5 | 14.5 | 0 | 62 | 8 | 2 |
| Time | Cloud Cover | Ceiling | Pressure | Precipitation | Accidents Onsite | Design Speed | Accidents Time | |
| 15:33:15 | 74 | 3139 | 1019.6 | 2.4 | 8 | 50 | 3 | |
| 15:33:16 | 74 | 3139 | 1019.6 | 2.4 | 7 | 70 | 3 | |
| 15:33:17 | 74 | 3139 | 1019.6 | 2.4 | 8 | 70 | 3 | |
| 15:33:18 | 74 | 3139 | 1019.6 | 2.4 | 8 | 70 | 3 | |
| 15:33:19 | 74 | 3139 | 1019.6 | 2.4 | 8 | 70 | 3 | |
| 15:33:20 | 74 | 3139 | 1019.6 | 2.4 | 9 | 70 | 3 |
| # | Attribute | Item | ID | Value Range | Penalty |
|---|---|---|---|---|---|
| 1 | rpm | very high | - | [5001–8000] | 3 |
| 2 | engine temperature | overheating | - | [105–200] | 2 |
| 3 | heart rate | tachycardia severe | - | [121–180] | 4 |
| 4 | weather types | rain | 18 | - | 4 |
| 5 | visibility | bad | - | [0.0–0.0] | 4 |
| 6 | precipitation | violent | - | [50.1–100.0] | 4 |
| 7 | accidents on site | very high | - | [133–300] | 4 |
| 8 | design speed | very serious | - | [41–100] | 4 |
| 9 | accidents time | high | - | [10–100] | 3 |
| # | Method | Hyperparameters | Accuracy |
|---|---|---|---|
| 1 | Label propagation (LP) | alpha = 0.2, gamma = 0.1, kernel = knn, number_neighbors = 10, and maximum_iterations = 5000 | 0.71 |
| 2 | Label spreading (LS) | gamma = 0.1, kernel = knn, number_neighbors = 15, and maximum_iterations = 5000 | 0.75 |
| 3 | Self training (SVM) | kernel = rbf, probability = True, and gamma = 0.1 | 0.62 |
| 4 | Self training (MLP) | activation_function = relu, hidden_layers = 3, neurons_per_layer = 30, learning_rate = constant, maximum_iterations = 5000, and solver = adam | 0.84 |
| 5 | Self training (RF) | number_estimators = 50, maximum_depth = None, minimum_samples_leaf = 1, maximum_features = sqrt, and minimum_samples_split = 2 | 0.83 |
| 6 | Self training (GBM) | learning_rate = 0.8, maximum_depth = 30, number_estimators = 100, minimum_samples_leaf = 1, maximum_features = None, and minimum_samples_split = 2 | 0.82 |
| 7 | Ensemble | estimators = [LP, LS, MLP, RF, GBM] and voting = hard | 0.82 |
| # | Algorithm | Hyperparameters |
|---|---|---|
| 1 | Gradient Boosting Machine (GBM) | learning_rate = 0.8, loss_function = log_loss, maximum_depth = 30, maximum_features = sqrt, minimum_samples_split = 0.5, and number_estimators = 100 |
| 2 | Multilayer Perceptron (MLP) | activation_function = tanh, hidden_layers = 3, neurons_per_layer = 100, learning_rate = adaptive, maximum_iterations = 1000, and solver = lbfgs |
| # | Algorithm | Folds | Results | Avg. Accuracy |
|---|---|---|---|---|
| 1 | GBM | 10 | [0.95713157, 0.95673647, 0.9589014, 0.95238095, 0.95751828, 0.9608773, 0.95573997, 0.95593756, 0.95692551, 0.95732069] | 0.956 |
| 2 | MLP | 10 | [0.98656657, 0.98636902, 0.98794705, 0.9832049, 0.98656392, 0.98755187, 0.9869591, 0.98676151, 0.9869591, 0.98794705] | 0.986 |
| Hour | Speed | rpm | Accel. | Throttle Pos. | Eng. Temp. | Eng. Load Value | Heart Rate | Curr. Weather | Visib. | Precip. | Acdnt. on Site | Design Speed | Acdnt. That Time | Risk Level |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 15 | 114 | 3251 | −0.64 | 17.6 | 94 | 23.5 | 100 | rain | 3.2 | 8 | 10 | 90 | 1 | very high |
| 15 | 26 | 3934 | 1.48 | 74.1 | 96 | 22.7 | 102 | rain | 3.2 | 8 | 105 | 90 | 6 | very high |
| 15 | 26 | 3540 | 1.8 | 76.1 | 97 | 94.5 | 102 | rain | 3.2 | 8 | 105 | 90 | 6 | very high |
| 15 * | 81 | 2950 | 0.22 | 60 | 94 | 58 | 118 | rain | 3.2 | 8 | 12 | 80 | 3 | very high |
| 16 | 44 | 2099 | 0.41 | 16.1 | 92 | 22 | 101 | cloudy | 8 | 24 | 248 | 80 | 15 | very high |
| 16 | 129 | 3694 | 0.14 | 31.8 | 91 | 87.5 | 96 | cloudy | 8 | 8 | 4 | 80 | 0 | high |
| 19 | 102 | 3895 | 0 | 49 | 94 | 91 | 84 | cloudy | 6.4 | 4.8 | 28 | 70 | 1 | high |
| 15 | 78 | 2873 | −0.27 | 34.1 | 94 | 85.9 | 118 | rain | 3.2 | 8 | 10 | 80 | 3 | high |
| 16 | 61 | 2223 | −0.13 | 30.6 | 94 | 91.8 | 106 | cloudy | 8 | 24 | 37 | 60 | 1 | high |
| 15 | 76 | 2184 | 0.1 | 20.4 | 94 | 57.3 | 94 | rain | 3.2 | 0 | 254 | 90 | 10 | high |
| 16 | 126 | 3573 | 0.29 | 65.1 | 94 | 86.7 | 94 | cloudy | 8 | 8 | 7 | 90 | 0 | medium |
| 19 | 58 | 4413 | 0.46 | 40 | 91 | 81.2 | 84 | cloudy | 6.4 | 0 | 82 | 90 | 3 | medium |
| 15 | 84 | 2402 | 0.26 | 16.5 | 91 | 21.6 | 113 | cloudy | 8 | 0 | 5 | 60 | 0 | medium |
| 16 | 78 | 2820 | 0 | 76.9 | 94 | 90.2 | 104 | cloudy | 8 | 24 | 11 | 70 | 0 | medium |
| 16 | 84 | 2410 | 0.25 | 43.1 | 95 | 26.3 | 67 | mostly cloudy | 16.1 | 1.3 | 253 | 90 | 14 | medium |
| 20 | 122 | 3466 | 0.49 | 28.6 | 92 | 71 | 89 | cloudy | 8 | 0 | 38 | 90 | 1 | low |
| 20 | 54 | 4177 | 0.47 | 40.4 | 93 | 91.4 | 85 | cloudy | 8 | 0 | 2 | 70 | 0 | low |
| 15 | 98 | 3832 | 0.56 | 78.8 | 92 | 63.9 | 104 | cloudy | 8 | 0 | 15 | 90 | 1 | low |
| 16 | 66 | 2316 | 0.34 | 18.8 | 91 | 34.5 | 98 | cloudy | 8 | 24 | 5 | 90 | 0 | low |
| 16 | 74 | 2680 | 0.54 | 82 | 95 | 80 | 74 | hazy sunshine | 16.1 | 0 | 246 | 90 | 16 | low |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marcillo, P.; Arciniegas-Ayala, C.; Valdivieso Caraguay, Á.L.; Sanchez-Gordon, S.; Hernández-Álvarez, M. POLIDriving: A Public-Access Driving Dataset for Road Traffic Safety Analysis. Appl. Sci. 2024, 14, 6300. https://doi.org/10.3390/app14146300
Marcillo P, Arciniegas-Ayala C, Valdivieso Caraguay ÁL, Sanchez-Gordon S, Hernández-Álvarez M. POLIDriving: A Public-Access Driving Dataset for Road Traffic Safety Analysis. Applied Sciences. 2024; 14(14):6300. https://doi.org/10.3390/app14146300
Chicago/Turabian StyleMarcillo, Pablo, Cristian Arciniegas-Ayala, Ángel Leonardo Valdivieso Caraguay, Sandra Sanchez-Gordon, and Myriam Hernández-Álvarez. 2024. "POLIDriving: A Public-Access Driving Dataset for Road Traffic Safety Analysis" Applied Sciences 14, no. 14: 6300. https://doi.org/10.3390/app14146300
APA StyleMarcillo, P., Arciniegas-Ayala, C., Valdivieso Caraguay, Á. L., Sanchez-Gordon, S., & Hernández-Álvarez, M. (2024). POLIDriving: A Public-Access Driving Dataset for Road Traffic Safety Analysis. Applied Sciences, 14(14), 6300. https://doi.org/10.3390/app14146300