
Tilt-X: Development of a Pitch-Axis Tiltrotor Quadcopter for Maximizing Horizontal Pulling Force and Yaw Moment


Abstract
1. Introduction
1.1. Motivation
1.2. State of the Art
1.3. Contribution
2. Modeling
2.1. Definition
2.1.1. Assumption
- The cantilever arms of Tilt-X are rigid body;
- The mass and moments of inertia of Tilt-X are constant;
- The geometric center and the center of gravity (COG) of Tilt-X are the same.
2.1.2. Notation
2.2. Kinematics
2.2.1. Kinematic Model
2.2.2. Rigid Body Transformation
2.3. Dynamics Equations
2.3.1. Aerodynamic Model
2.3.2. Dynamic Model
3. Experiment
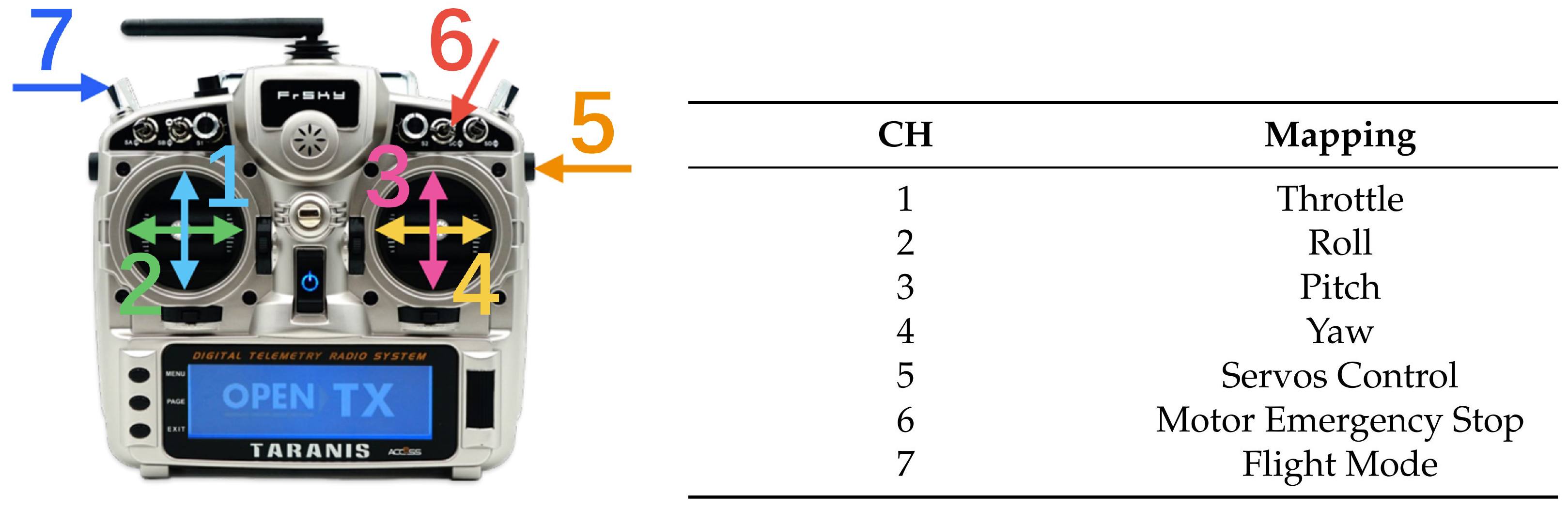
3.1. Remote Control
- In AltHold mode, the throttle stick is raised to 50% and maintained.
- The servos control rotary knob is rotated to a certain position to tilt the propellers to a certain angle.
- The servos control rotary knob is rotated to a larger position to tilt the propellers to a greater angle.
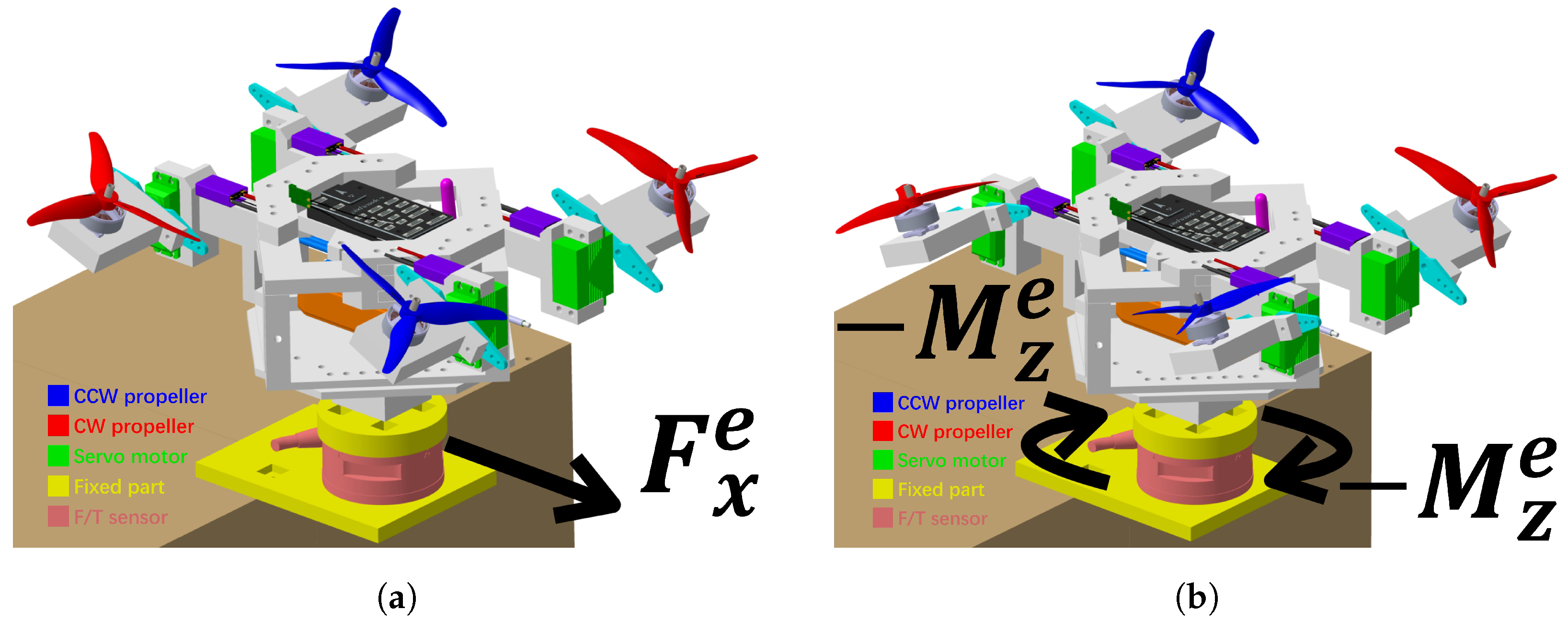
3.2. Experimental Setup
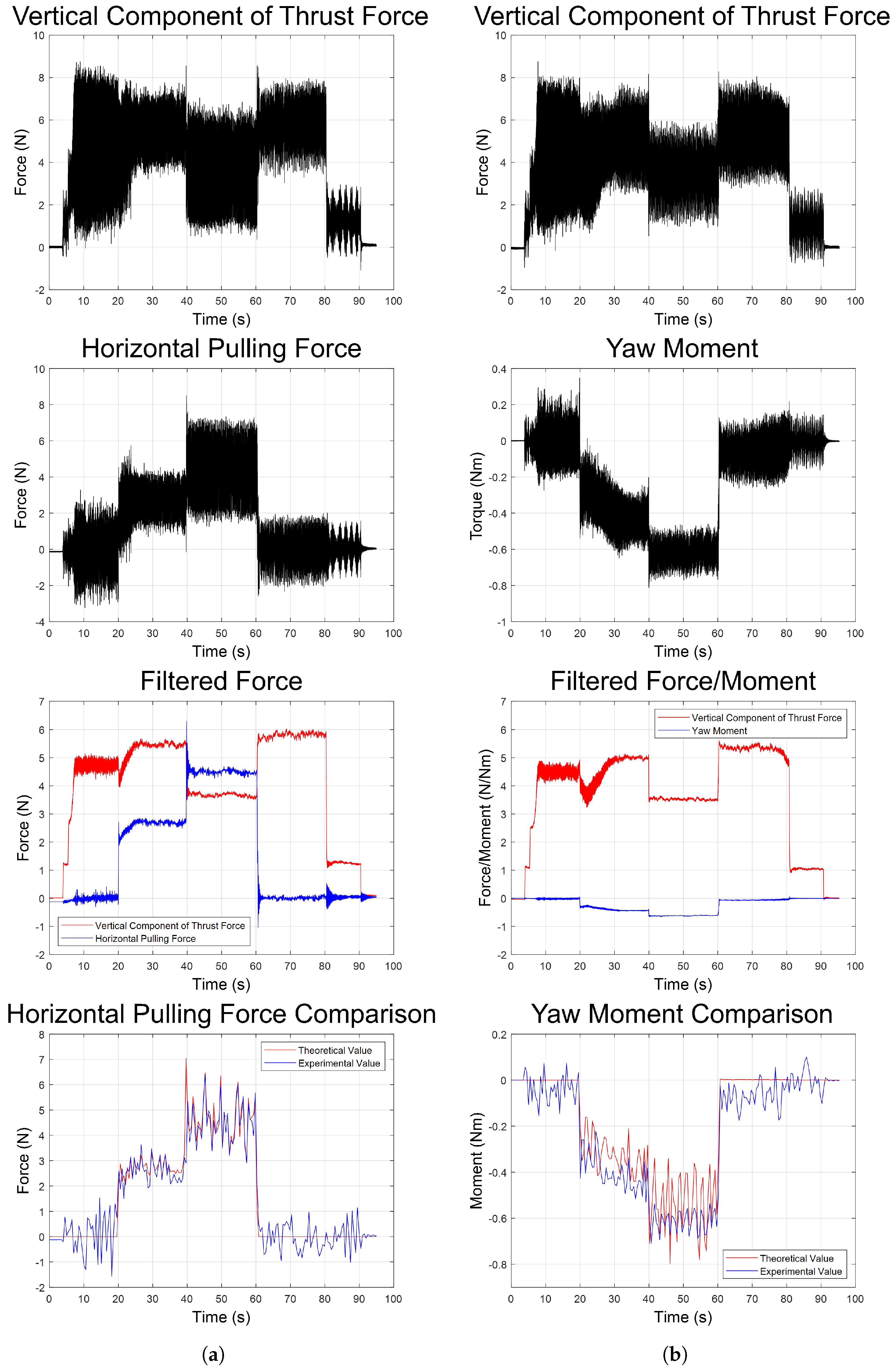
3.3. Experimental Result
4. Conclusions
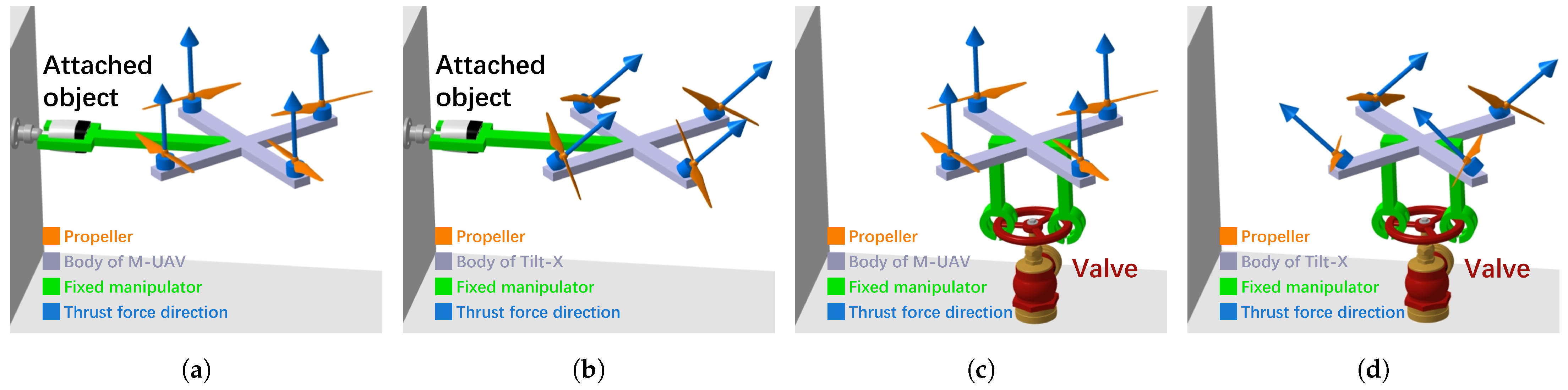
- Performing aerial horizontal interactions to attach or detach objects on a wall, including surveillance equipment, environmental monitoring instruments, and building inspection devices;
- Performing aerial torsional interactions to turn valves, such as fire hydrant valves and pipeline valves.
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| TM-UAVs | Tiltrotor multicopter unmanned aerial vehicles |
| M-UAVs | Multicopter unmanned aerial vehicles |
| UAV | Unmanned aerial vehicle |
| SOTA | State-of-the-art |
| VTOL | Vertical takeoff and landing |
| OMAV | Omnidirectional micro-aerial vehicles |
| APhI | Aerial physical interaction |
| DOF | Degrees of freedom |
| COG | Center of gravity |
| BCF | Body coordinate frame |
| ECF | Earth coordinate frame |
| CCW | Counterclockwise |
| CW | Clockwise |
| AltHold | Altitude hold |
| PW | Pulse width |
| RC | Remote controller |
| CH | Channel |
| ESCs | Electronic speed controllers |
| F/T | Force/Torque |
References
- Liu, X.; Dou, M.; Huang, D.; Gao, S.; Yan, R.; Wang, B.; Cui, J.; Ren, Q.; Dou, L.; Gao, Z.; et al. TJ-FlyingFish: Design and Implementation of an Aerial-Aquatic Quadrotor with Tiltable Propulsion Units. In Proceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA), London, UK, 29 May–2 June 2023; pp. 7324–7330. [Google Scholar]
- Jiang, G.; Voyles, R. A Nonparallel Hexrotor UAV with Faster Response to Disturbances for Precision Position Keeping. In Proceedings of the 2014 IEEE International Symposium on Safety, Security, and Rescue Robotics (2014), Hokkaido, Japan, 27–30 October 2014; pp. 1–5. [Google Scholar]
- Franchi, A.; Carli, R.; Bicego, D.; Ryll, M. Full-Pose Tracking Control for Aerial Robotic Systems with Laterally Bounded Input Force. IEEE Trans. Robot. 2018, 34, 534–541. [Google Scholar] [CrossRef]
- Brescianini, D.; D’Andrea, R. Design, modeling and control of an omni-directional aerial vehicle. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 3261–3266. [Google Scholar]
- Qin, Y.; Chen, N.; Cai, Y.; Xu, W.; Zhang, F. Gemini II: Design, Modeling, and Control of a Compact Yet Efficient Servoless Bi-copter. IEEE/ASME Trans. Mechatronics 2022, 27, 4304–4315. [Google Scholar] [CrossRef]
- Lee, S.J.; Lee, D.; Kim, J.; Kim, D.; Jang, I.; Kim, H.J. Fully Actuated Autonomous Flight of Thruster-Tilting Multirotor. IEEE/ASME Trans. Mechatronics 2021, 26, 765–776. [Google Scholar] [CrossRef]
- Li, Y.; Qin, Y.; Xu, W.; Zhang, F. Modeling, Identification, and Control of Non-minimum Phase Dynamics of Bi-copter UAVs. In Proceedings of the 2020 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM), Boston, MA, USA, 6–9 July 2020; pp. 1249–1255. [Google Scholar]
- Ryll, M.; Bülthoff, H.H.; Giordano, P.R. A Novel Overactuated Quadrotor Unmanned Aerial Vehicle: Modeling, Control, and Experimental Validation. IEEE Trans. Control. Syst. Technol. 2015, 23, 540–556. [Google Scholar] [CrossRef]
- Ryll, M.; Bicego, D.; Giurato, M.; Lovera, M.; Franchi, A. FAST-Hex—A Morphing Hexarotor: Design, Mechanical Implementation, Control and Experimental Validation. IEEE/ASME Trans. Mechatronics 2022, 27, 1244–1255. [Google Scholar] [CrossRef]
- Allenspach, M.; Bodie, K.; Brunner, M.; Rinsoz, L.; Taylor, Z.; Kamel, M.; Siegwart, R.; Nieto, J. Design and Optimal Control of a Tiltrotor Micro-aerial Vehicle for Efficient Omnidirectional Flight. Int. J. Robot. Res. 2020, 39, 1305–1325. [Google Scholar] [CrossRef]
- Falanga, D.; Kleber, K.; Mintchev, S.; Floreano, D.; Scaramuzza, D. The Foldable Drone: A Morphing Quadrotor that Can Squeeze and Fly. IEEE Robot. Autom. Lett. 2019, 4, 209–216. [Google Scholar] [CrossRef]
- Bucki, N.; Tang, J.; Mueller, M.W. Design and Control of a Midair-Reconfigurable Quadcopter Using Unactuated Hinges. IEEE Trans. Robot. 2023, 39, 539–557. [Google Scholar] [CrossRef]
- Albers, A.; Trautmann, S.; Howard, T.; Nguyen, T.A.; Frietsch, M.; Sauter, C.S.C. Semi-autonomous flying robot for physical interaction with environment. In Proceedings of the 2010 IEEE Conference on Robotics, Automation and Mechatronics, Singapore, 28–30 June 2010; pp. 441–446. [Google Scholar]
- Hamaza, S.; Georgilas, I.; Fernandez, M.; Sanchez, P.; Richardson, T.; Heredia, G.; Ollero, A. Sensor Installation and Retrieval Operations Using an Unmanned Aerial Manipulator. IEEE Robot. Autom. Lett. 2019, 4, 2793–2800. [Google Scholar] [CrossRef]
- Meng, X.; He, Y.; Han, J. Hybrid Force/Motion Control and Implementation of an Aerial Manipulator towards Sustained Contact Operations. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; pp. 3678–3683. [Google Scholar]
- Tzoumanikas, D.; Graule, F.; Yan, Q.; Shah, D.; Popović, M.; Leutenegger, S. Aerial manipulation using hybrid force and position nmpc applied to aerial writing. In Proceedings of the Robotics: Science and Systems 2020, Corvalis, OR, USA, 12–16 July 2020. [Google Scholar]
- Wopereis, H.W.; Ridder, W.L.W.v.d.; Lankhorst, T.J.W.; Klooster, L.; Bukai, E.M.; Wuthier, D.; Nikolakopoulos, G.; Stramigioli, S.; Engelen, J.B.C.; Fumagalli, M. Multimodal Aerial Locomotion: An Approach to Active Tool Handling. IEEE Robot. Autom. Mag. 2018, 25, 57–65. [Google Scholar] [CrossRef]
- Jiang, G.; Voyles, R.; Sebesta, K.; Greiner, H. Mock-up of the exhaust shaft inspection by dexterous hexrotor at the DOE WIPP site. In Proceedings of the 2015 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), West Lafayette, IN, USA, 18–20 October 2015; pp. 1–2. [Google Scholar]
- Bodie, K.; Brunner, M.; Pantic, M.; Walser, S.; Pfändler, P.; Angst, U.; Siegwart, R.; Nieto, J. An Omnidirectional Aerial Manipulation Platform for Contact-Based Inspection. In Proceedings of the Robotics: Science and Systems 2019, Freiburg im Breisgau, Germany, 22–26 June 2019. [Google Scholar]
- Nava, G.; Sablé, Q.; Tognon, M.; Pucci, D.; Franchi, A.; Nava, G.; Sablé, Q.; Tognon, M.; Pucci, D.; Franchi, A. Direct Force Feedback Control and Online Multi-Task Optimization for Aerial Manipulators. IEEE Robot. Autom. Lett. 2020, 5, 331–338. [Google Scholar] [CrossRef]
- Kim, S.; Seo, H.; Kim, H.J. Operating an unknown drawer using an aerial manipulator. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 5503–5508. [Google Scholar]
- Lee, D.; Seo, H.; Jang, I.; Lee, S.J.; Kim, H.J. Aerial Manipulator Pushing a Movable Structure Using a DOB-Based Robust Controller. IEEE Robot. Autom. Lett. 2021, 6, 723–730. [Google Scholar] [CrossRef]
- Byun, J.; Jang, I.; Lee, D.; Kim, H.J. A Hybrid Controller Enhancing Transient Performance for an Aerial Manipulator Extracting a Wedged Object. IEEE Trans. Autom. Sci. Eng. 2023, 1–10. [Google Scholar] [CrossRef]
- Benzi, F.; Brunner, M.; Tognon, M.; Secchi, C.; Siegwart, R. Adaptive Tank-based Control for Aerial Physical Interaction with Uncertain Dynamic Environments Using Energy-Task Estimation. IEEE Robot. Autom. Lett. 2022, 7, 9129–9136. [Google Scholar] [CrossRef]
- Orsag, M.; Korpela, C.; Bogdan, S.; Oh, P. Dexterous Aerial Robots—Mobile Manipulation Using Unmanned Aerial Systems. IEEE Trans. Robot. 2017, 33, 1453–1466. [Google Scholar] [CrossRef]
- Martinez, R.R.; Paul, H.; Shimonomura, K. Aerial Torsional Work Utilizing a Multirotor UAV with Add-on Thrust Vectoring Device. Drones 2023, 7, 551. [Google Scholar] [CrossRef]
- Valavanis, K.P. Advances in Unmanned Aerial Vehicles: State of the Art and the Road to Autonomy, 2007th ed.; Springer: Berlin/Heidelberg, Germany, 2007; p. 176. [Google Scholar]
- Quan, Q. Introduction to Multicopter Design and Control, 1st ed.; Springer Nature: Singapore, 2017; p. 62. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Definition |
|---|---|
| e, b, i | The superscripts representing the earth coordinate frame (ECF), the body coordinate frame (BCF), and the ith propeller, respectively |
| o, p, v, | The origin, position, velocity, and angular velocity, respectively |
| x, y, z | The subscripts representing the vectors in Cartesian coordinate system |
| The Euler angle | |
| , , | The roll angle, pitch angle, and yaw angle, respectively |
| The propeller tilt angle | |
| s, c, t | The abbreviations for sine, cosine, and tangent, respectively |
| R, A | The rotation matrix and the relationship between attitudes 1, respectively |
| W, F, M, | The wrench, propeller thrust force, propeller moment, and gyroscopic torque |
| , | The lumped parameter thrust force coefficient and lumped parameter moment coefficient |
| , , | The unit vectors 2 |
| I | The diagonal matrix 3 representing a moment of inertia |
| , , | The central principal moments of inertia |
| The air density | |
| a, r | The propeller blade area and propeller radius, respectively |
| d | The distance between the body center and any rotor |
| m | The mass |
| g | The gravitational acceleration |
| Component | Part Number | Quantity |
|---|---|---|
| Power Module | [Holybro] PM07 Power Module (14S) | 1 |
| Flight Controller | [Holybro] Pixhawk 4 | 1 |
| Telemetry | [Holybro] SiK Telemetry Radio V3 | 1 |
| Battery | [Poly-Tronics] B1500N-UKP60 | 1 |
| Receiver | [FrSky] R-XSR | 1 |
| ESC | [Cyclone] 45A BLHeli-S 2-6S Lipo | 4 |
| Rotor | [T-Motor] P2207 V3.0 1950Kv | 4 |
| Propeller | [Gemfan] Hurricane 51466-3 MCK V2 | 4 |
| BEC | [Hobbywing] UBEC 10A HV Air 3-14S | 1 |
| Servo Motor | [Savox] SB-2290SG | 4 |
| Servo Arm | [Futaba] Full Arm M3 | 4 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tao, X.; Ko, S.Y. Tilt-X: Development of a Pitch-Axis Tiltrotor Quadcopter for Maximizing Horizontal Pulling Force and Yaw Moment. Appl. Sci. 2024, 14, 6181. https://doi.org/10.3390/app14146181
Tao X, Ko SY. Tilt-X: Development of a Pitch-Axis Tiltrotor Quadcopter for Maximizing Horizontal Pulling Force and Yaw Moment. Applied Sciences. 2024; 14(14):6181. https://doi.org/10.3390/app14146181
Chicago/Turabian StyleTao, Xiaodi, and Seong Young Ko. 2024. "Tilt-X: Development of a Pitch-Axis Tiltrotor Quadcopter for Maximizing Horizontal Pulling Force and Yaw Moment" Applied Sciences 14, no. 14: 6181. https://doi.org/10.3390/app14146181
APA StyleTao, X., & Ko, S. Y. (2024). Tilt-X: Development of a Pitch-Axis Tiltrotor Quadcopter for Maximizing Horizontal Pulling Force and Yaw Moment. Applied Sciences, 14(14), 6181. https://doi.org/10.3390/app14146181