
A 3UPS/S Spherical Parallel Manipulator Designed for Robot-Assisted Hand Rehabilitation after Stroke


Abstract
1. Introduction
2. Related Work
- All existing devices can be used for only one of the upper limbs (right or left limb).
- All devices are attached to the limb. The user is not free from wearing it.
- The weight of the device acts on the limb.
- The devices do not perform any prescribed exercises suggested by clinicians.
- The devices do not perform rehabilitation for all the fingers simultaneously.
- The cost of the device is very high.
- The users (stroke patients) cannot set up the device by themselves.
- The existing devices cannot be used for all age groups (including children).
- Additive manufacturing technology is not adopted. It saves time for manufacturing.
- There is no single device which performs rehabilitation for the fingers, wrist, elbow, and shoulder joints together.
- The majority of the devices are serial manipulators.
- Most devices use linkage mechanisms, which are rigid links, and do not use complaint mechanisms.
- Most devices use electric motors for actuation and do not use flexible actuators.
- Existing devices do not perform wrist joint motions and finger motions together.
- This exoskeleton robot is unique since it is one of the first to use a parallel wrist manipulator for upper limb rehabilitation. Given that the wrist joint has two rotational degrees of freedom, the proposed device can be used to rehabilitate the wrist after a stroke.
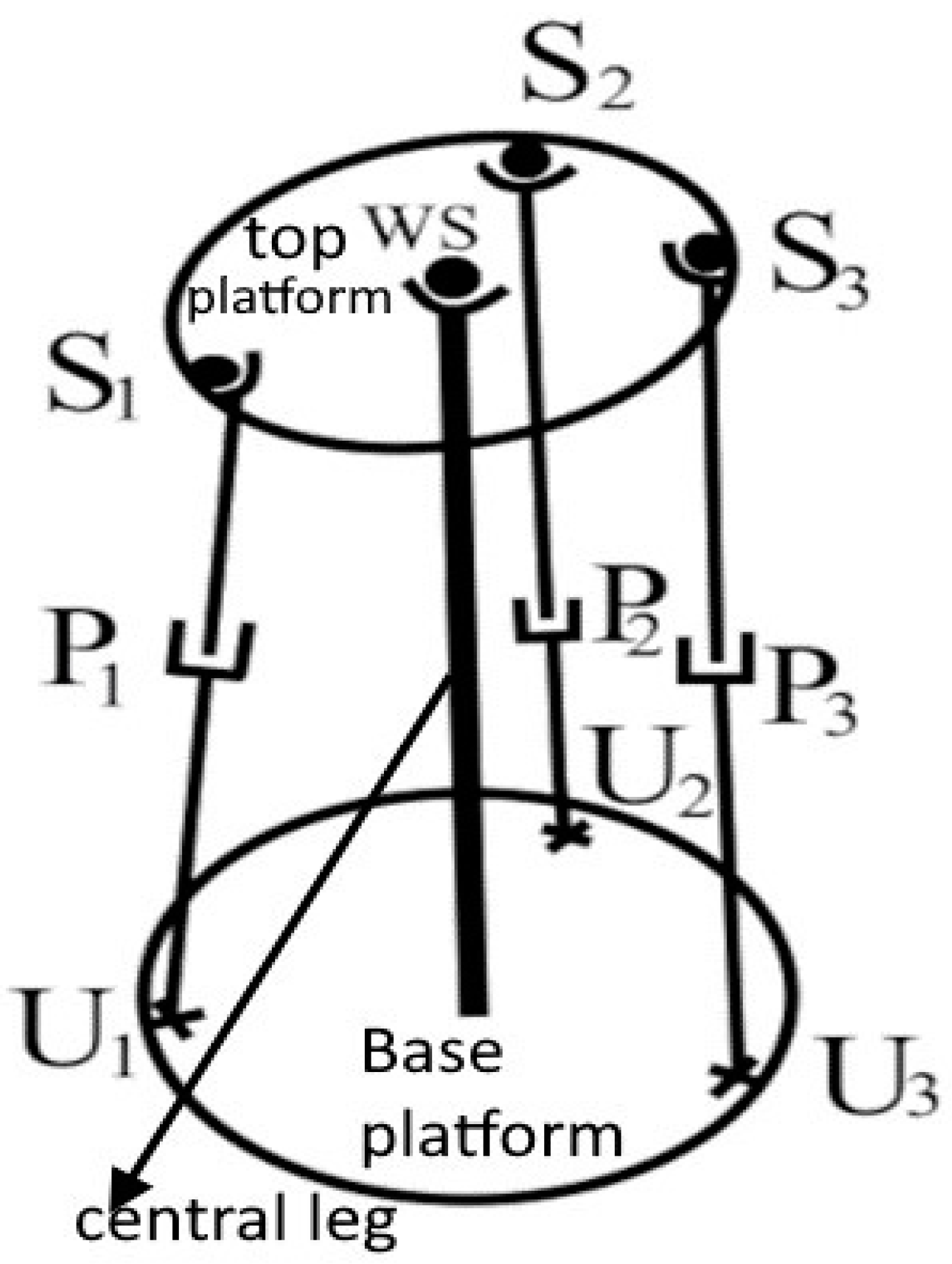
- The 3UPS/S manipulator has good stiffness because it has a central leg connecting the base and top platforms.
- This exoskeleton has a stand which is attached to a table. This stand reduces the weight of the exoskeleton acting on the patient.
- The exoskeleton could be utilized to accommodate patients with the same average body size.
- This exoskeleton can be used on both the hands.
- This exoskeleton technology operates without the use of real-time computers or software.
- It is an inexpensive rehabilitation system that may be used at home.
- If one of the upper limbs is functional, the patients can set up the device on their own.
- The only attachment point is at the hand. Some devices use multiple attachment locations.
- The robot does not perform a complete range of motion during wrist flexion and extension motions.
- The top platform does not stay parallel to the base platform at the home position when the exoskeleton is idle. In this case, the central leg is an imaginary one and it is substituted by the human arm and wrist in the rehabilitation process.
- This robot has singular configurations within its workspace.
- This robot has more degrees of freedom than required to perform wrist motions.
- This robot cannot be used for all age groups. It needs to be customized for different groups.
3. Exoskeleton Manipulator Structure for Wrist Rehabilitation
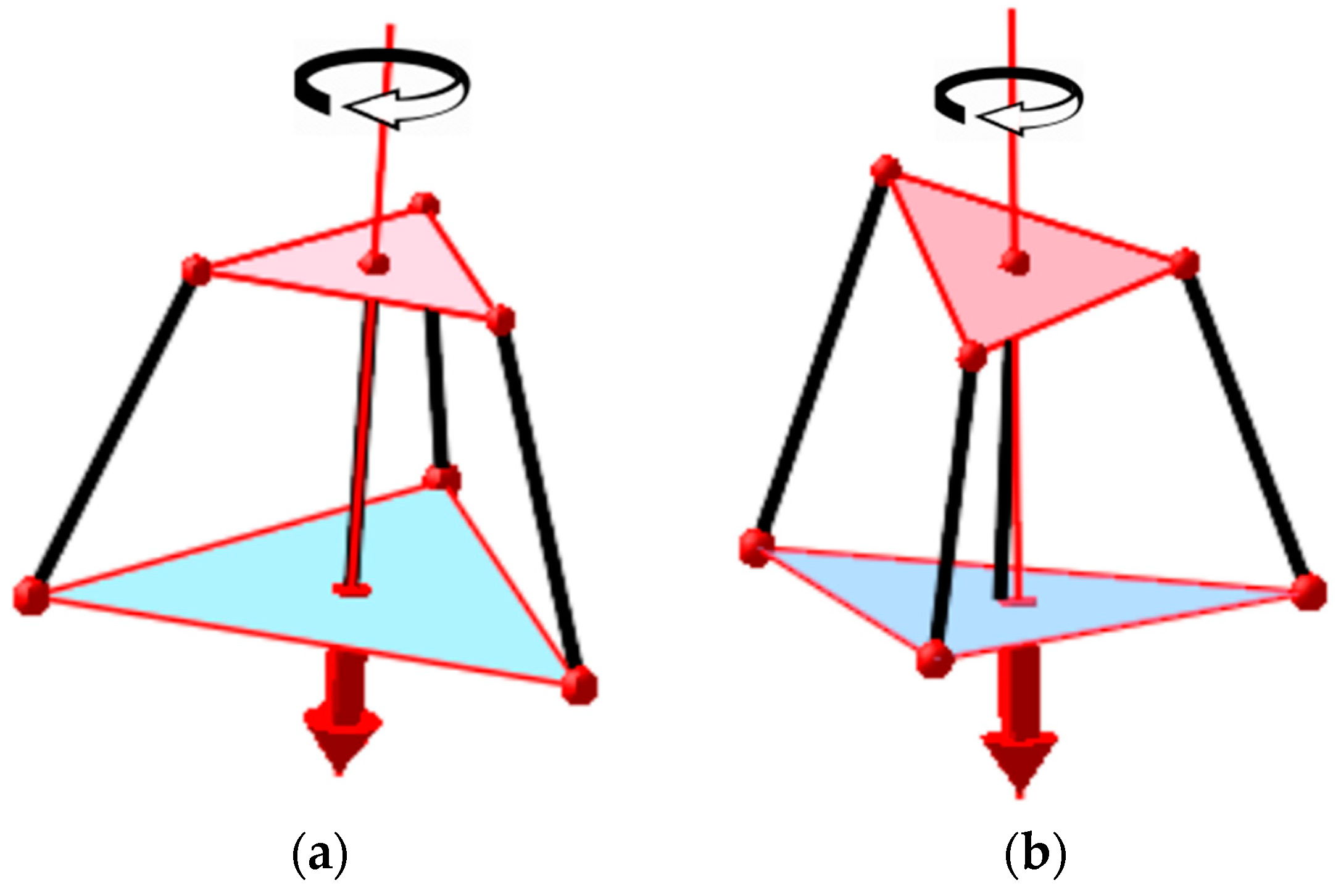
3.1. Manipulator Design
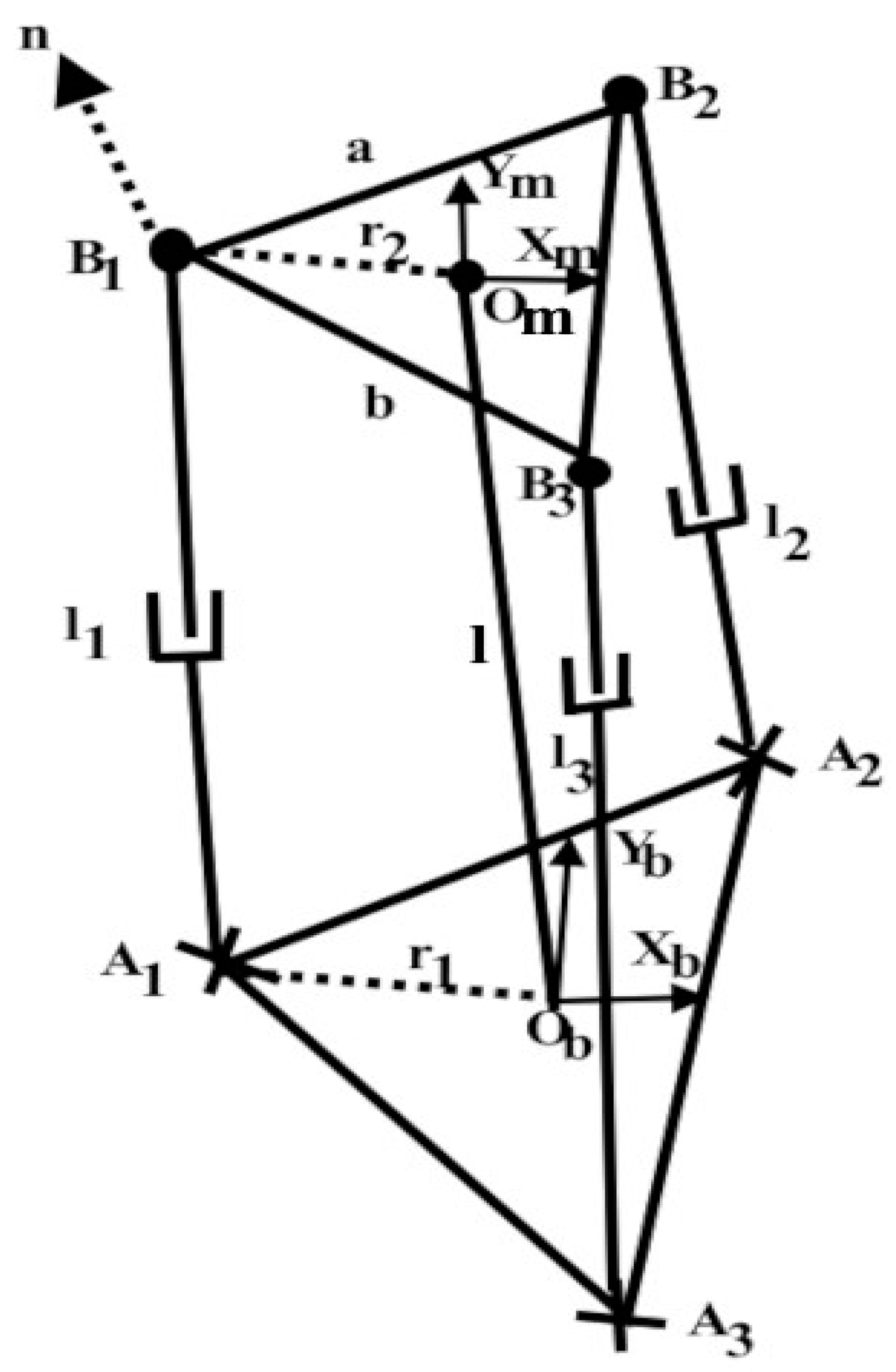
3.2. Inverse Kinematics
3.3. Workspace
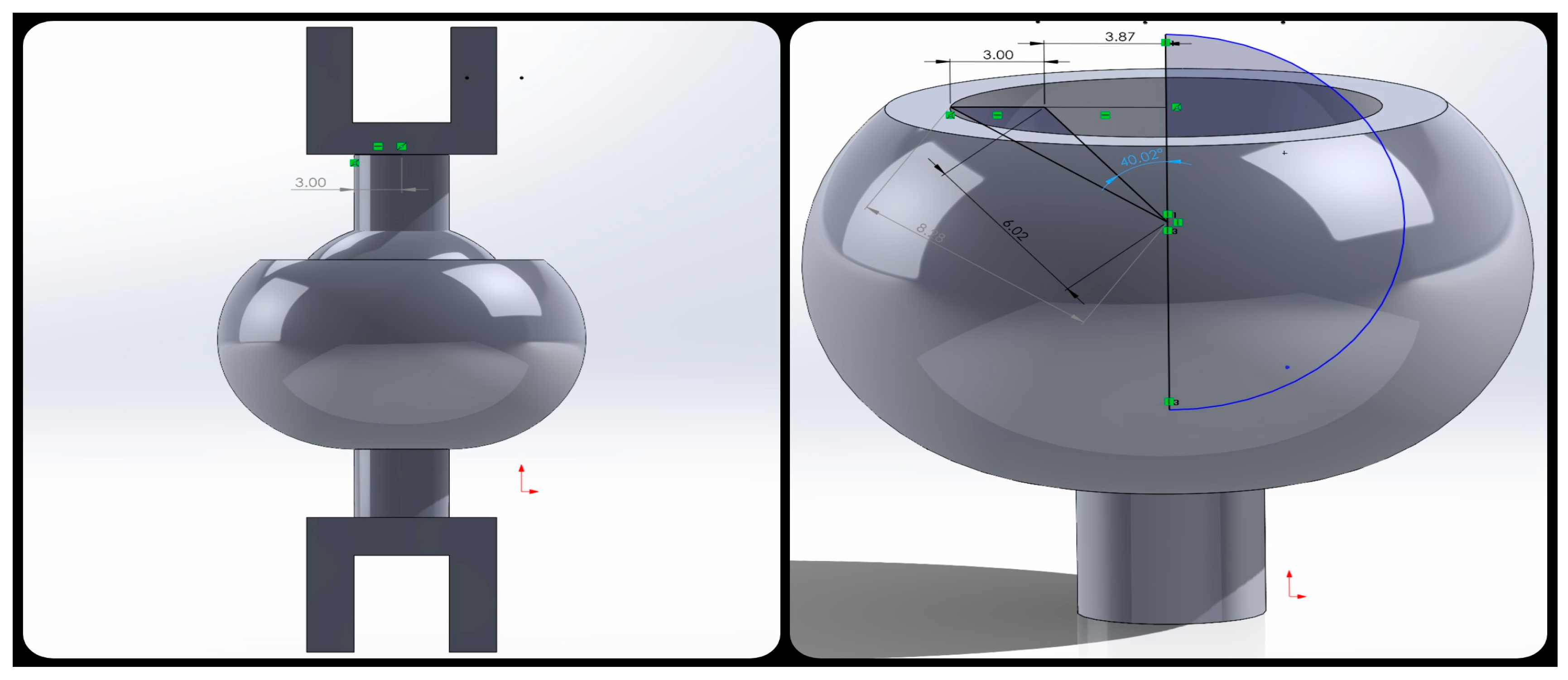
3.4. Custom-Made Spherical Joint
4. Kinematics, Workspace, Singularity, and Simulation
4.1. Exoskeleton Range of Motion and Human Wrist Joint Motions
4.2. Inverse Kinematics Solution
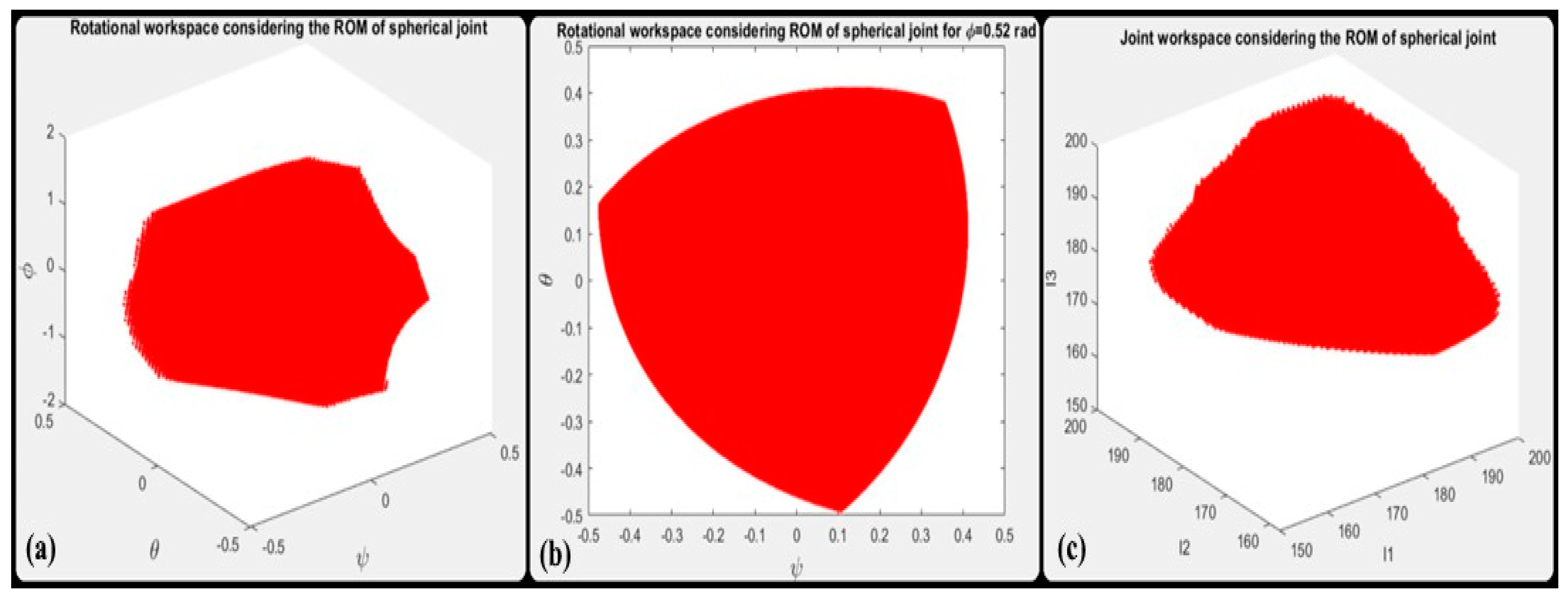
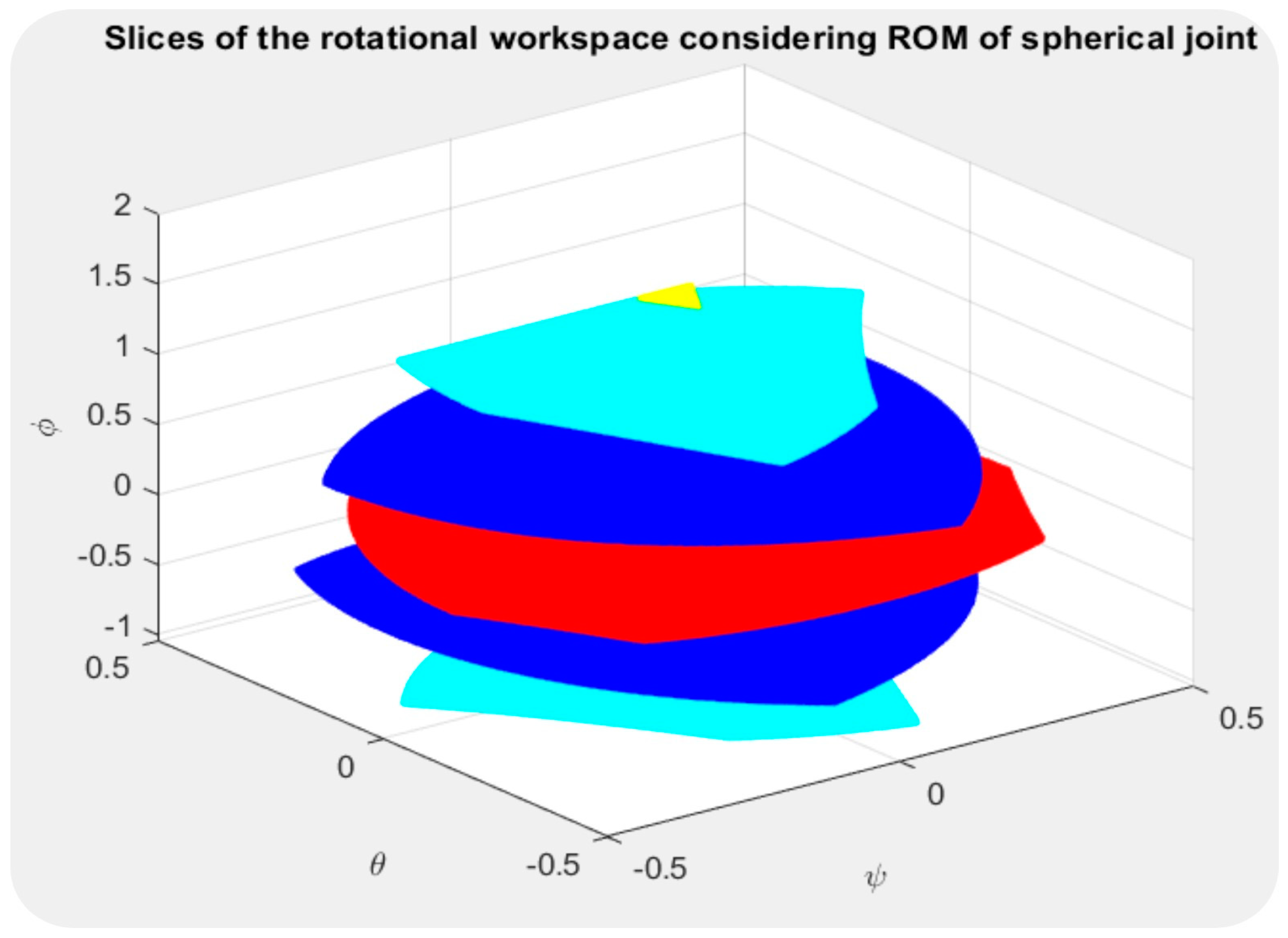
4.3. Rotational and Joint Workspaces
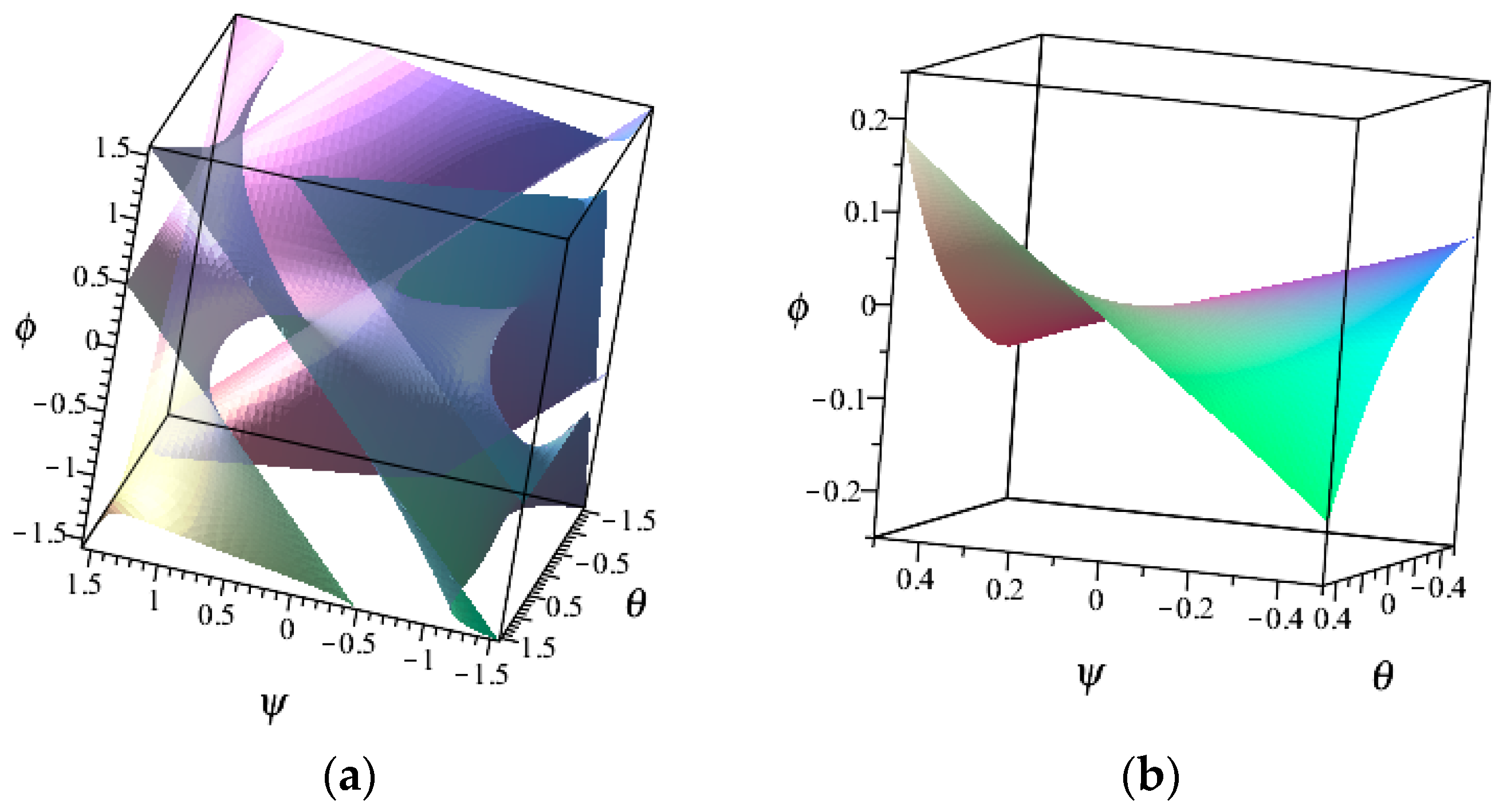
4.4. Singularity Analysis Using Geometric Algebra
4.5. Actuators, Control, and Safety
5. Discussion and Future Work
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Nomenclature
| PM, SM | Parallel Manipulator, Serial Manipulator |
| DOFs | Degrees of Freedom |
| PW | Parallel Wrist |
| SPM | Spherical Parallel Manipulator |
| LM, CD, GD | Linkage Mechanism, Cable Drive, Gear Drive |
| PA, HA, EM | Pneumatic Actuator, Hydraulic Actuator, Electric Motor |
| ROM | Range of Motion |
| F/E, AD/AB, I/E, P/S, UD/RD | Flexion/Extension, Adduction/Abduction, Internal/External Rotation, Pronation/Supination, Ulnar Deviation/Radial Deviation Motions |
| SR, EW, WT | Shoulder Joint, Elbow Joint, Wrist Joint |
| TRL | Technology Readiness Level |
| BMA | Biomimetic actuators |
| R | Revolute joint |
| Ui | Universal joints |
| Pi | Prismatic joints |
| Si | Spherical joints |
| WS | Wrist joint of the user |
| li | Link length |
| Ai | Universal joints at vertices of equilateral triangle |
| Bi | Spherical joints at vertices of equilateral triangle |
| r1 | Radius of base platform |
| r2 | Radius of top platform |
| OmXmYm | Coordinate system attached to top platform |
| ObXbYb | Coordinate system attached to base platform |
| a, b | Length of the sides B1B2 and B1B3 |
| Ψ, θ, ϕ | Roll, pitch, yaw angles |
| Normal vector | |
| α | Angle between the vectors and |
| Geometric algebra of 3D vector space | |
| Geometric algebra of 6D vector space | |
| s | General screw written in |
| S | General screw written in |
| Unit pseudoscalar of the geometric algebra | |
| Unit pseudoscalar of the geometric algebra | |
| Iverse of the unit pseudoscalar | |
| Basis vectors | |
| Screw representing the i-th joint of the j leg | |
| , , | Scalar coefficients for a screw description |
| Blade associated with the j leg | |
| Dual associated with the j leg | |
| Reciprocal screw associated with the j leg | |
| Uncontrollable instantaneous twist |
References
- Feigin, V.L.; Brainin, M.; Norrving, B.; Martins, S.; Sacco, R.L.; Hacke, W.; Fisher, M.; Pandian, J.; Lindsay, P. World Stroke Organization (WSO): Global Stroke Fact Sheet 2022. Int. J. Stroke 2022, 17, 18–29. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Lu, J.; Yang, H.; Guo, K. Current State of Robotics in Hand Rehabilitation after Stroke: A Systematic Review. Appl. Sci. 2022, 12, 4540. [Google Scholar] [CrossRef]
- Tsai, L. Robot Analysis: The Mechanics of Serial and Parallel Manipulators; John Wiley & Sons: Hoboken, NJ, USA, 1999; ISBN 0-471-32593-7. [Google Scholar]
- Ashith Shyam, R.B.; Ghosal, A. Path Planning of a 3-UPU Wrist Manipulator for Sun Tracking in Central Receiver Tower Systems. Mech Mach Theory 2018, 119, 130–141. [Google Scholar] [CrossRef]
- Abarca, V.E.; Elias, D.A. A Review of Parallel Robots: Rehabilitation, Assistance, and Humanoid Applications for Neck, Shoulder, Wrist, Hip, and Ankle Joints. Robotics 2023, 12, 131. [Google Scholar] [CrossRef]
- Karouia, M.; Hervé, J.M. A Three-Dof Tripod for Generating Spherical Rotation. In Advances in Robot Kinematics; Springer: Dordrecht, The Netherlands, 2000. [Google Scholar] [CrossRef]
- Di Gregorio, R. A Review of the Literature on the Lower-Mobility Parallel Manipulators of 3-UPU or 3-URU Type. Robotics 2020, 9, 5. [Google Scholar] [CrossRef]
- Gosselin, C. Kinematic Analysis, Optimization and Programming of Parallel Robotic Manipulators. Ph.D. Thesis, McGill University, Montreal, QC, Canada, 1988. [Google Scholar]
- Chaparro Altamirano, D.; Zavala-Yoe, R.; Ramirez-Mendoza, R.A.; Chaparro-Altamirano, D.; Ramírez-Mendoza, R. Dynamics and Control of a 3SPS-1S Parallel Robot Used in Security Applications. In Proceedings of the 21st International Symposium on Mathematical Theory of Networks and Systems (MTNS 2014), Groningen, The Netherlands, 7–11 July 2014. [Google Scholar]
- Staicu, S. Dynamics of the Spherical 3-U-PS/S Parallel Mechanism with Prismatic Actuators. Multibody Syst. Dyn. 2009, 22, 115–132. [Google Scholar] [CrossRef]
- Wang, X.; Zhu, Q.; Lv, S.; Hao, R.; Huang, J. Kinematics and Workspace Analysis of Tricept Robot. In Proceedings of the 2020 IEEE 9th Joint International Information Technology and Artificial Intelligence Conference (ITAIC), Chongqing, China, 11–13 December 2020. [Google Scholar] [CrossRef]
- Li, K.; Li, J. Kinematic Analysis and Co-Simulation of 3UPS/S Parallel Mechanis. In Proceedings of the 2021 4th International Conference on Electron Device and Mechanical Engineering, ICEDME 2021, Guangzhou, China, 19–21 March 2021. [Google Scholar] [CrossRef]
- Han, B.; Jiang, Y.; Yang, W.; Xu, Y.; Yao, J.; Zhao, Y. Kinematics Characteristics Analysis of a 3-UPS/S Parallel Airborne Stabilized Platform. Aerosp. Sci. Technol. 2023, 134, 108163. [Google Scholar] [CrossRef]
- Navarro, J.S.; Garcia, N.; Perez, C.; Fernandez, E.; Saltaren, R.; Almonacid, M. Kinematics of a Robotic 3UPS1S Spherical Wrist Designed for Laparoscopic Applications. Int. J. Med. Robot. Comput. Assist. Surg. 2010, 6, 291–300. [Google Scholar] [CrossRef]
- Araujo-Gómez, P.; Díaz-Rodriguez, M.; Mata, V.; Valera, A.; Page, A. Design of a 3-UPS-RPU Parallel Robot for Knee Diagnosis and Rehabilitation. In Proceedings of the CISM International Centre for Mechanical Sciences, Courses and Lectures, Udine, Italy, 20–23 June 2016; Volume 569. [Google Scholar] [CrossRef]
- Tian, W.; Zhang, X.; Lv, D.; Wang, L.; Liu, Q. Sliding Mode Control Strategy of 3-UPS/S Shipborne Stable Platform with LSTM Neural Network Prediction. Ocean Eng. 2022, 265, 112497. [Google Scholar] [CrossRef]
- Khoshnoodi, H.; Rahmani Hanzaki, A.; Talebi, H.A. Kinematics, Singularity Study and Optimization of an Innovative Spherical Parallel Manipulator with Large Workspace. J. Intell. Robot. Syst. Theory Appl. 2018, 92, 309–321. [Google Scholar] [CrossRef]
- Paganelli, D. Avoiding Parallel Singularities of 3UPS and 3UPU Spherical Wrists. In Proceedings of the IEEE International Conference on Robotics and Automation, Rome, Italy, 10–14 April 2007. [Google Scholar] [CrossRef]
- Enferadi, J. A Novel Approach for Obtaining Assembly Modes of a 3UPS-S Fully Spherical Parallel Manipulator. J. Mech. 2016, 32, 555–563. [Google Scholar] [CrossRef]
- Li, X.Y.; Chen, W.Y. Singularity Analysis of Limited-DOF Parallel Manipulator Based on Jacobian Matrixes. Appl.Mech. Mater. 2012, 141, pp. 488–492. Available online: https://www.scientific.net/AMM.141.488 (accessed on 13 December 2023).
- Bonev, I.A.; Gosselin, C.M. Singularity Loci of Spherical Parallel Mechanisms. In Proceedings of the IEEE International Conference on Robotics and Automation, Barcelona, Spain, 18–22 April 2005; Volume 2005. [Google Scholar] [CrossRef]
- Bonev, I.A.; Gosselin, C.M. Analytical Determination of the Workspace of Symmetrical Spherical Parallel Mechanisms. IEEE Trans. Robot. 2006, 22, 1011–1017. [Google Scholar] [CrossRef]
- Han, X.; Liu, Y. Geometric Condition of 3UPS-S Parallel Mechanism in Singular Configuration. Chin. J. Mech. Eng. Engl. Ed. 2014, 27, 130–137. [Google Scholar] [CrossRef]
- Frisoli, A.; Procopio, C.; Chisari, C.; Creatini, I.; Bonfiglio, L.; Bergamasco, M.; Rossi, B.; Carboncini, M.C. Positive Effects of Robotic Exoskeleton Training of Upper Limb Reaching Movements after Stroke. J. Neuroeng. Rehabil. 2012, 9, 36. [Google Scholar] [CrossRef] [PubMed]
- Ren, Y.; Park, H.S.; Zhang, L.Q. Developing a Whole-Arm Exoskeleton Robot with Hand Opening and Closing Mechanism for Upper Limb Stroke Rehabilitation. In Proceedings of the 2009 IEEE International Conference on Rehabilitation Robotics, ICORR 2009, Kyoto, Japan, 23–26 June 2009. [Google Scholar] [CrossRef]
- Kawasaki, H.; Ito, S.; Ishigure, Y.; Nishimoto, Y.; Aoki, T.; Mouri, T.; Sakaeda, H.; Abe, M. Development of a Hand Motion Assist Robot for Rehabilitation Therapy by Patient Self-Motion Control. In Proceedings of the 2007 IEEE 10th International Conference on Rehabilitation Robotics, ICORR’07, Noordwijk, The Netherlands, 13–15 June 2007. [Google Scholar] [CrossRef]
- Tsagarakis, N.G.; Caldwell, D.G. Development and Control of a “soft-Actuated” Exoskeleton for Use in Physiotherapy and Training. Auton. Robot. 2003, 15, 21–33. [Google Scholar] [CrossRef]
- Sanchez, R.; Reinkensmeyer, D.; Shah, P.; Liu, J.; Rao, S.; Smith, R.; Cramer, S.; Rahman, T.; Bobrow, J. Monitoring Functional Arm Movement for Home-Based Therapy after Stroke. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology, San Francisco, CA, USA, 1–5 September 2004; Volume 26. [Google Scholar] [CrossRef]
- Stienen, A.H.A.; Hekman, E.E.G.; Prange, G.B.; Jannink, M.J.A.; Aalsma, A.M.M.; Van Der Helm, F.C.T.; Van Der Kooij, H. Dampace: Design of an Exoskeleton for Force-Coordination Training in Upper-Extremity Rehabilitation. J. Med. Devices Trans. ASME 2009, 3, 031003. [Google Scholar] [CrossRef]
- Mavroidis, C.; Nikitczuk, J.; Weinberg, B.; Danaher, G.; Jensen, K.; Pelletier, P.; Prugnarola, J.; Stuart, R.; Arango, R.; Leahey, M.; et al. Smart Portable Rehabilitation Devices. J. Neuroeng. Rehabil. 2005, 2, 18. [Google Scholar] [CrossRef] [PubMed]
- Naidu, D.; Stopforth, R.; Bright, G.; Davrajh, S. A Portable Passive Physiotherapeutic Exoskeleton. Int. J. Adv. Robot. Syst. 2012, 9, 52065. [Google Scholar] [CrossRef]
- Jackson, A.E.; Culmer, P.R.; Levesley, M.C.; Makower, S.G.; Cozens, J.A.; Bhakta, B.B. Effector Force Requirements to Enable Robotic Systems to Provide Assisted Exercise in People with Upper Limb Impairment after Stroke. In Proceedings of the IEEE International Conference on Rehabilitation Robotics, Zurich, Switzerland, 29 June–1 July 2011. [Google Scholar] [CrossRef]
- Schabowsky, C.N.; Godfrey, S.B.; Holley, R.J.; Lum, P.S. Development and Pilot Testing of HEXORR: Hand Exoskeleton Rehabilitation Robot. J. Neuroeng. Rehabil. 2010, 7, 36. [Google Scholar] [CrossRef]
- Sugar, T.G.; He, J.; Koeneman, E.J.; Koeneman, J.B.; Herman, R.; Huang, H.; Schultz, R.S.; Herring, D.E.; Wanberg, J.; Balasubramanian, S.; et al. Design and Control of RUPERT: A Device for Robotic Upper Extremity Repetitive Therapy. IEEE Trans. Neural Syst. Rehabil. Eng. 2007, 15, 336–346. [Google Scholar] [CrossRef]
- Ball, S.J.; Brown, I.E.; Scott, S.H. MEDARM: A Rehabilitation Robot with 5DOF at the Shoulder Complex. In Proceedings of the IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Zurich, Switzerland, 4–7 September 2007. [Google Scholar] [CrossRef]
- Gupta, A.; O’Malley, M.K. Design of a Haptic Arm Exoskeleton for Training and Rehabilitation. IEEE/ASME Trans. Mechatron. 2006, 11, 280–289. [Google Scholar] [CrossRef]
- Bi, Z.M.; Lang, S.Y.T. Joint Workspace of Parallel Kinematic Machines. Robot. Comput. Integr. Manuf. 2009, 25, 57–63. [Google Scholar] [CrossRef]
- Aboulissane, B.; El Bakkali, L.; El Bahaoui, J. Workspace Analysis and Optimization of the Parallel Robots Based on Computer-Aided Design Approach. Facta Univ. Ser. Mech. Eng. 2020, 18, 79–89. [Google Scholar] [CrossRef]
- Gao, Z.; Zhang, D. Workspace Representation and Optimization of a Novel Parallel Mechanism with Three-Degrees-of-Freedom. Sustainability 2011, 3, 2217–2228. [Google Scholar] [CrossRef]
- Hou, Y.; Zhao, Y. Workspace Analysis and Optimization of 3-PUU Parallel Mechanism in Medicine Base on Genetic Algorithm. Open Biomed. Eng. J. 2015, 9, 214–218. [Google Scholar] [CrossRef] [PubMed]
- Merlet, J.-P. Efficient design of parallel robots. VDI Berichte 1998, 1427, 1–13. [Google Scholar]
- Tanev, T.K. Singularity analysis of a 4-DOF parallel manipulator using geometric algebra. In Advances in Robot Kinematics, Mechanism and Motion; Lennarčič, J., Roth, B., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; pp. 275–284. [Google Scholar] [CrossRef]
- Tanev, T.K. Geometric algebra approach to singularity of parallel manipulators with limited mobility. In Advances in Robot Kinematics, Analysis and Design; Lennarčič, J., Wenger, P., Eds.; Springer: Berlin/Heidelberg, Germany, 2008; pp. 39–48. [Google Scholar] [CrossRef]
- Fortuna, L.; Frasca, M.; Buscarino, A. Optimal and Robust Control: Advanced Topics with MATLAB, 2nd ed.; CRC Press, Inc.: Boca Raton, FL, USA, 2022. [Google Scholar] [CrossRef]
- Innocenti, C.; Parenti-Castelli, V. Echelon Form Solution of Direct Kinematics for The General Fully-Parallel Spherical Wrist. Mech. Mach. Theory 1993, 28, 553–561. [Google Scholar] [CrossRef]
- Zhao, J.; Lv, Y.; Zeng, Q.; Wan, L. Online Policy Learning-Based Output-Feedback Optimal Control of Continuous-Time Systems. IEEE Trans. Circuits Syst. II Express Briefs 2024, 71, 652–656. [Google Scholar] [CrossRef]
- Wang, Y.; Liu, Z.; Xu, J.; Yan, W. Heterogeneous Network Representation Learning Approach for Ethereum Identity Identification. IEEE Trans. Comput. Soc. Syst. 2023, 10, 890–899. [Google Scholar] [CrossRef]
- Kelaiaia, R.; Chemori, A.; Brahmia, A.; Kerboua, A.; Zaatri, A.; Company, O. Optimal dimensional design of parallel manipulators with an illustrative case study: A review. Mech Mach Theory 2023, 188, 105390. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Name of the Robot | Active DOF | Kinematic Structure | Power Transmission | Actuator Type | Applied Joints and Supported Movements |
|---|---|---|---|---|---|
| L-Exo [24] | 4 | SM | LM, GD | EM | EW (F/E), SR (AB/AD, F/E, I/E). |
| IntelliArm [25] | 8 | SM | LM, CD | EM | SR (AB/AD, F/E, I/E), EW (P/S, F/E), WT (F/E), SR (+1 DOF), Hand (+1 DOF). |
| Hand motion assist robot [26] | 18 | SM | LM | EM | EW (P/S), WT (F/E), Hand (+16 DOF). |
| Soft actuated exoskeleton [27] | 7 | SM | LM, CD | PA | SR (AB/AD, F/E, I/E), EW (P/S, F/E), WT (F/E, U/R). |
| T-WREX [28] | 5 | PM | LM | EM | SR (AB/AD, F/E, I/E), EW (P/S, F/E). |
| Dampace [29] | 5 | SM | LM, CD | HA | SR (AB/AD, F/E, I/E), EW (P/S, F/E). |
| Smart portable device [30] | 2 | PM | LM | EM | EW (F/E, P/S). |
| Physiotherapeutic exoskeleton [31] | 5 | SM | LM | EM | EW (F/E), SR (AB/AD, F/E, I/E), WT (+1 DOF). |
| iPAM [32] | 6 | SM | LM | PA | SR (AB/AD, F/E, I/E), EW(F/E), SR (+2 DOF). |
| HEXORR [33] | 3 | SM | LM | EM | EW (F), WT (F), WT (+1 DOF). |
| RUPERT [34] | 4 | SM | LM | PA | SR (F), EW (E, S), WT (E). |
| MEDARM [35] | 6 | SM | LM, CD | EM | SR (AB/AD, F/E, I/E), EW (F/E), SR (+2 DOF). |
| Normal Wrist ROM | Achieved ROM | Device Capability |
|---|---|---|
| Flexion: 0–80° | Flexion: 0–31° | Flexion: 0–31° |
| Extension: 0–70° | Extension: 0–31° | Extension: 0–31° |
| Ulnar deviation: 0–30° | Ulnar deviation: 0–30° | Ulnar deviation: 0–38° |
| Radial deviation: 0–20° | Radial deviation: 0–20° | Radial deviation: 0–26° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Valayil, T.P.; Tanev, T.K. A 3UPS/S Spherical Parallel Manipulator Designed for Robot-Assisted Hand Rehabilitation after Stroke. Appl. Sci. 2024, 14, 4457. https://doi.org/10.3390/app14114457
Valayil TP, Tanev TK. A 3UPS/S Spherical Parallel Manipulator Designed for Robot-Assisted Hand Rehabilitation after Stroke. Applied Sciences. 2024; 14(11):4457. https://doi.org/10.3390/app14114457
Chicago/Turabian StyleValayil, Tony Punnoose, and Tanio K. Tanev. 2024. "A 3UPS/S Spherical Parallel Manipulator Designed for Robot-Assisted Hand Rehabilitation after Stroke" Applied Sciences 14, no. 11: 4457. https://doi.org/10.3390/app14114457
APA StyleValayil, T. P., & Tanev, T. K. (2024). A 3UPS/S Spherical Parallel Manipulator Designed for Robot-Assisted Hand Rehabilitation after Stroke. Applied Sciences, 14(11), 4457. https://doi.org/10.3390/app14114457