
Transportation Simulation Modeling and Location-Based Services Data Completion Based on a Data and Model Dual-Driven Approach


Abstract
1. Introduction
2. Literature Review
2.1. Data-Driven Transportation Simulation
2.2. LBS Data Completion
2.3. Summary
3. Materials and Methods
3.1. Flowchart of the Dual-Driven Simulation Model
3.2. Data Acquisition
3.3. Model Initialization
3.3.1. Study Area Selection
3.3.2. Data Processing
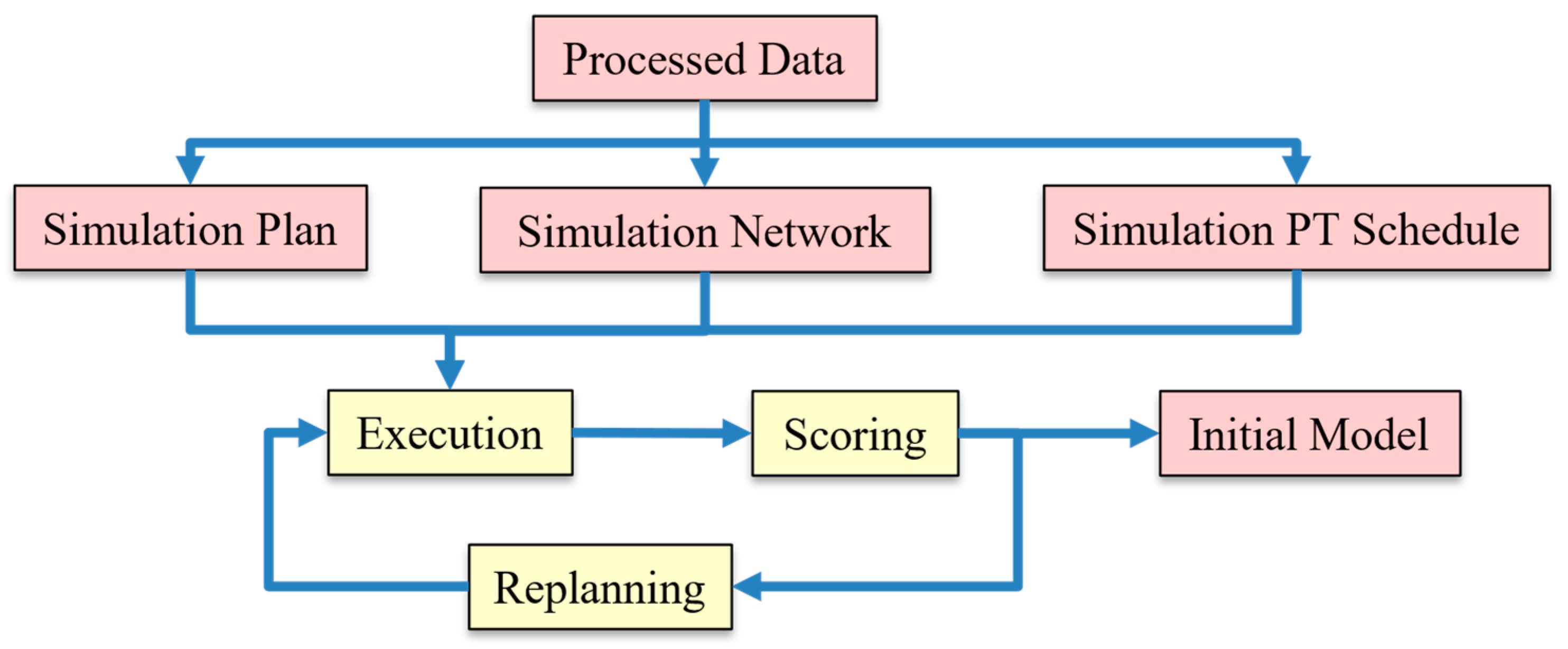
3.3.3. Model Initialization
3.4. Simulation Model Calibration
3.4.1. Links Selection and Evaluation Metrics for Simulation Calibration
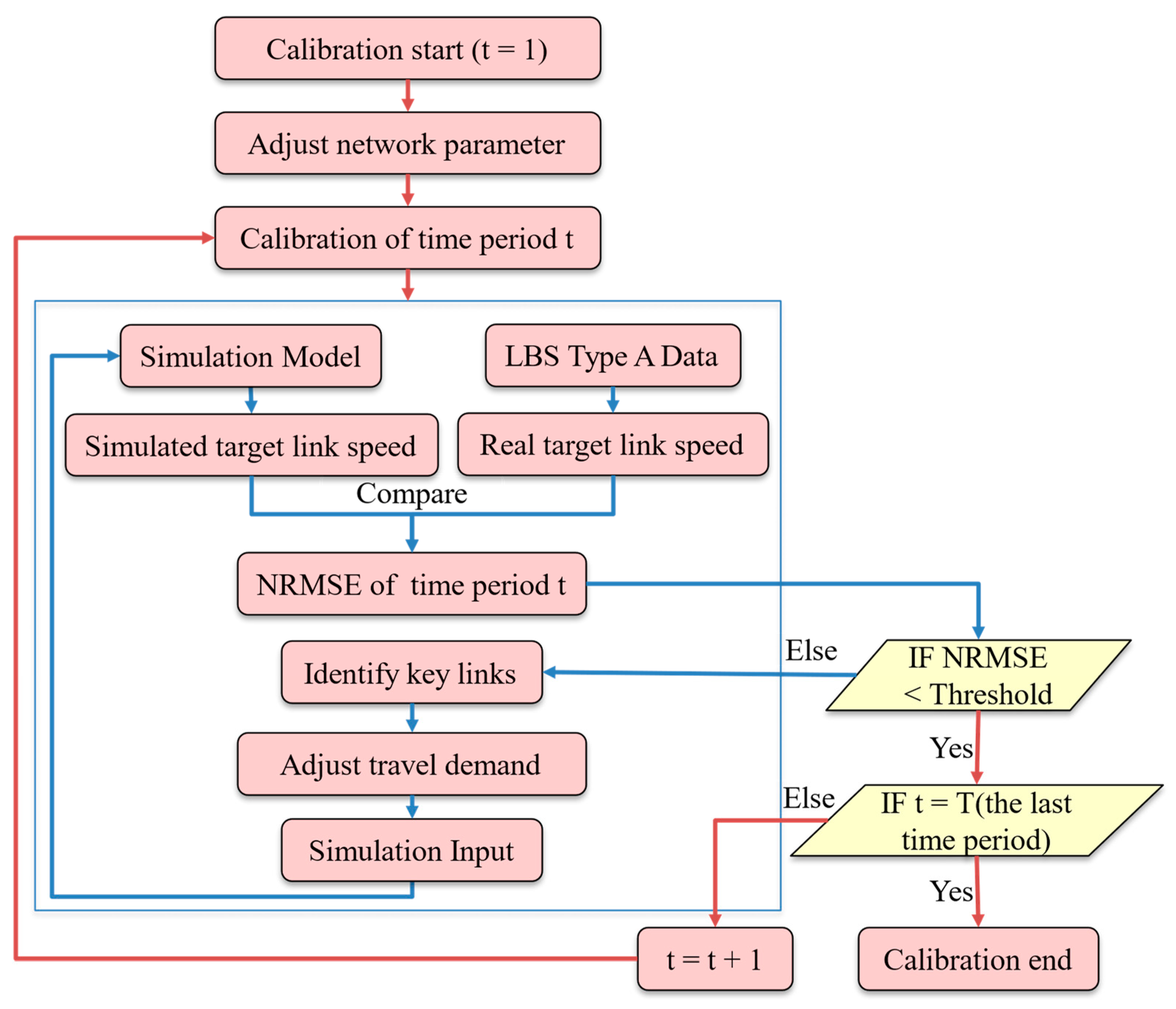
3.4.2. Simulation Model Calibration Method
3.5. LBS Missing Path Completion
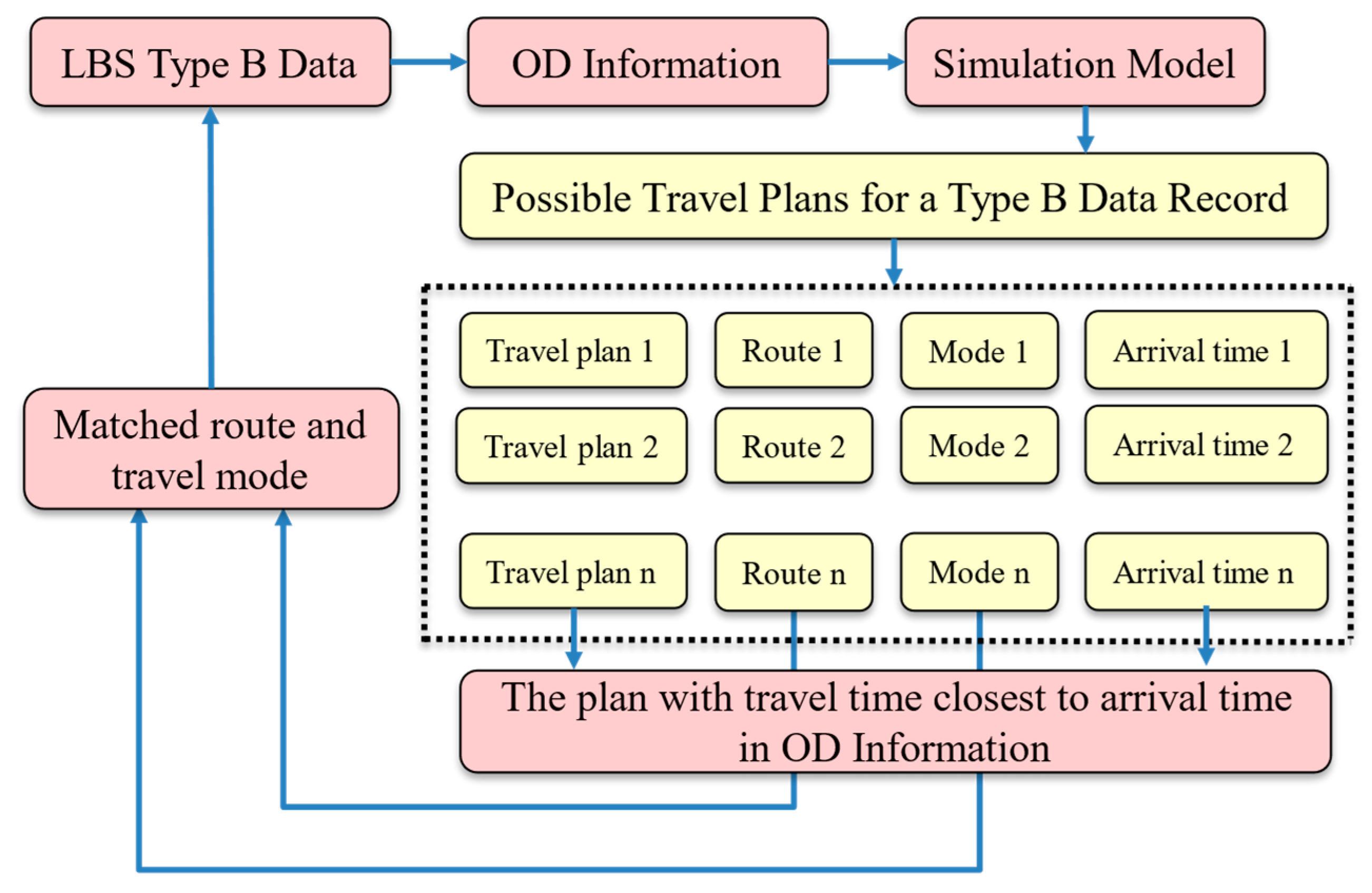
3.5.1. Completion of Missing Paths for LBS Sparse Trajectory Points
3.5.2. Evaluation of the Effectiveness of Missing Path Completion for LBS Data
4. Results
4.1. Data and Simulation Initialization
4.2. Simulation Calibration Results
4.3. Results of Path Completion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Colak, S.; Lima, A.; González, M.C. Understanding congested travel in urban areas. Nat. Commun. 2016, 7, 10793. [Google Scholar] [CrossRef] [PubMed]
- Ehmke, J.F.; Campbell, A.M.; Thomas, B.W. Data-driven approaches for emissions-minimized paths in urban areas. Comput. Oper. Res. 2016, 67, 34–47. [Google Scholar] [CrossRef]
- Vazifeh, M.M.; Santi, P.; Resta, G.; Strogatz, S.H.; Ratti, C. Addressing the minimum fleet problem in on-demand urban mobility. Nature 2018, 557, 534–538. [Google Scholar] [CrossRef]
- Xiao, Y.; Yang, M.F.; Zhu, Z.; Yang, H.; Zhang, L.; Ghader, S. Modeling indoor-level non-pharmaceutical interventions during the COVID-19 pandemic: A pedestrian dynamics-based microscopic simulation approach. Transp. Policy 2021, 109, 12–23. [Google Scholar] [CrossRef] [PubMed]
- Chen, X.Q.; Xiong, C.F.; He, X.; Zhu, Z.; Zhang, L. Time-of-day vehicle mileage fees for congestion mitigation and revenue generation: A simulation-based optimization method and its real-world application. Transp. Res. Part C-Emerg. Technol. 2016, 63, 71–95. [Google Scholar] [CrossRef]
- Gao, Y.H.; Qu, Z.W.; Song, X.M.; Yun, Z.Y. Modeling of urban road network traffic carrying capacity based on equivalent traffic flow. Simul. Model. Pract. Theory 2022, 115, 102462. [Google Scholar] [CrossRef]
- Zhu, Z.; Xiong, C.F.; Chen, X.Q.; He, X.; Zhang, L. Integrating mesoscopic dynamic traffic assignment with agent-based travel behavior models for cumulative land development impact analysis. Transp. Res. Part C-Emerg. Technol. 2018, 93, 446–462. [Google Scholar] [CrossRef]
- Saw, K.; Katti, B.K.; Joshi, G. Literature Review of Traffic Assignment: Static and Dynamic. Int. J. Transp. Eng. 2015, 2, 339–347. [Google Scholar]
- de Souza, F.; Verbas, O.; Auld, J. Mesoscopic Traffic Flow Model for Agent-Based Simulation. In Proceedings of the 10th International Conference on Ambient Systems, Networks and Technologies (ANT)/2nd International Conference on Emerging Data and Industry 4.0 (EDI40), Leuven, Belgium, 29 April–2 May 2019; pp. 858–863. [Google Scholar]
- Griggs, W.M.; Ordóñez-Hurtado, R.H.; Crisostomi, E.; Häusler, F.; Massow, K.; Shorten, R.N. A Large-Scale SUMO-Based Emulation Platform. IEEE Trans. Intell. Transp. Syst. 2015, 16, 3050–3059. [Google Scholar] [CrossRef]
- Morency, C. The ambivalence of ridesharing. Transportation 2007, 34, 239–253. [Google Scholar] [CrossRef]
- Xie, M.Q.; Cheng, W.; Gill, G.S.; Zhou, J.; Jia, X.D.; Choi, S. Investigation of hit-and-run crash occurrence and severity using real-time loop detector data and hierarchical Bayesian binary logit model with random effects. Traffic Inj. Prev. 2018, 19, 207–213. [Google Scholar] [CrossRef] [PubMed]
- Friedrich, M.; Immisch, K.; Jehlicka, P.; Otterstätter, T.; Schlaich, J. Generating Origin-Destination Matrices from Mobile Phone Trajectories. Transp. Res. Rec. 2010, 2196, 93–101. [Google Scholar] [CrossRef]
- Munizaga, M.A.; Palma, C. Estimation of a disaggregate multimodal public transport Origin-Destination matrix from passive smartcard data from Santiago, Chile. Transp. Res. Part C-Emerg. Technol. 2012, 24, 9–18. [Google Scholar] [CrossRef]
- Gurram, S.; Sivaraman, V.; Apple, J.T.; Pinjari, A.R. Agent-based modeling to simulate road travel using Big Data from smartphone GPS: An application to the continental United States. In Proceedings of the IEEE International Conference on Big Data (Big Data), Los Angeles, CA, USA, 9–12 December 2019; pp. 3553–3562. [Google Scholar]
- Zhang, L.; Yang, W.C.; Wang, J.M.; Rao, Q. Large-Scale Agent-Based Transport Simulation in Shanghai, China. Transp. Res. Rec. 2013, 2399, 34–43. [Google Scholar] [CrossRef]
- Kim, K.; Pant, P.; Yamashita, E. Integrating travel demand modeling and flood hazard risk analysis for evacuation and sheltering. Int. J. Disaster Risk Reduct. 2018, 31, 1177–1186. [Google Scholar] [CrossRef]
- Qasim, Z.; Ziboon, A.R.; Falih, K. TransCad analysis and GIS techniques to evaluate transportation network in Nasiriyah city. In Proceedings of the 3rd International Conference of Buildings, Construction and Environmental Engineering (BCEE), Sharm el Sheikh, Egypt, 23–25 October 2017. [Google Scholar]
- Jacyna, M.; Wasiak, M.; Klodawski, M.; Golebiowski, P. Modelling of Bicycle Traffic in the Cities Using VISUM. In Proceedings of the 10th International Scientific Conference on Transportation Science and Technology (TRANSBALTICA), Vilnius, Lithuania, 4–5 May 2017; pp. 435–441. [Google Scholar]
- Balmer, M.; Rieser, M.; Meister, K.; Charypar, D.; Lefebvre, N.; Nagel, K.; Axhausen, K. MATSim-T: Architecture and simulation times. In Multi-Agent Systems for Traffic and Transportation Engineering; IGI Global: Hershey, PA, USA, 2009; pp. 57–78. [Google Scholar]
- Chen, X.Q.; Zhu, Z.; Zhang, L. Simulation-based optimization of mixed road pricing policies in a large real-world network. In Proceedings of the Current Practices in Transport: Appraisal Methods, Policies and Models, 42nd European Transport Conference Selected Proceedings, Goethe Univ, Frankfurt, Germany, 29 September–1 October 2014; pp. 215–226. [Google Scholar]
- Chen, X.Q.; Zhang, L.; He, X.; Xiong, C.F.; Li, Z.H. Surrogate-Based Optimization of Expensive-to-Evaluate Objective for Optimal Highway Toll Charges in Transportation Network. Comput.-Aided Civ. Infrastruct. Eng. 2014, 29, 359–381. [Google Scholar] [CrossRef]
- Noh, H.; Chiu, Y.C.; Zheng, H.; Hickman, M.; Mirchandani, P. Approach to Modeling Demand and Supply for a Short-Notice Evacuation. Transp. Res. Rec. 2009, 2091, 91–99. [Google Scholar] [CrossRef]
- Park, B.B.; Won, J.; Yun, I. Application of microscopic simulation model calibration and validation procedure—Case study of coordinated actuated signal system. In Proceedings of the 85th Annual Meeting of the Transportation-Research-Board, Washington, DC, USA, 22–26 January 2006; pp. 113–122. [Google Scholar]
- Gao, Y.H.; Qu, Z.W.; Song, X.M.; Yun, Z.Y.; Zhu, F. Coordinated perimeter control of urban road network based on traffic carrying capacity model. Simul. Model. Pract. Theory 2023, 123, 102680. [Google Scholar] [CrossRef]
- Gulhan, G.; Ceylan, H.; Özuysal, M.; Ceylan, H. Impact of utility-based accessibility measures on urban public transportation planning: A case study of Denizli, Turkey. Cities 2013, 32, 102–112. [Google Scholar] [CrossRef]
- Tang, J.Y.; McNabola, A.; Misstear, B.; Caulfield, B. An evaluation of the impact of the Dublin Port Tunnel and HGV management strategy on air pollution emissions. Transp. Res. Part D-Transp. Environ. 2017, 52, 1–14. [Google Scholar] [CrossRef]
- Basavaraj, V.; Noyes, D.; Fiondella, L.; Lownes, N. Mitigating the Impact of Transportation Network Disruptions on Evacuation. In Proceedings of the IEEE International Symposium on Technologies for Homeland Security (HST), Waltham, MA, USA, 14–16 April 2015. [Google Scholar]
- Ahmed, F.; Hawas, Y.E. An integrated real-time traffic signal system for transit signal priority, incident detection and congestion management. Transp. Res. Part C-Emerg. Technol. 2015, 60, 52–76. [Google Scholar] [CrossRef]
- Feng, Y.H.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A real-time adaptive signal control in a connected vehicle environment. Transp. Res. Part C-Emerg. Technol. 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Li, Y.F.; Song, Y.; Zheng, T.X.; Feng, H.Z. TransModeler based implementation of autonomous vehicular platoon control. In Proceedings of the 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 4087–4092. [Google Scholar]
- Song, Z.J.; Wang, H.Z.; Sun, J.; Tian, Y. Experimental Findings with VISSIM and TransModeler for Evaluating Environmental and Safety Impacts using Micro-Simulations. Transp. Res. Rec. 2020, 2674, 566–580. [Google Scholar] [CrossRef]
- Zegeye, S.K.; De Schutter, B.; Hellendoorn, J.; Breunesse, E.A.; Hegyi, A. Integrated macroscopic traffic flow, emission, and fuel consumption model for control purposes. Transp. Res. Part C-Emerg. Technol. 2013, 31, 158–171. [Google Scholar] [CrossRef]
- Sewall, J.; Wilkie, D.; Lin, M.C. Interactive Hybrid Simulation of Large-Scale Traffic. ACM Trans. Graph. 2011, 30, 1–12. [Google Scholar] [CrossRef]
- Hörl, S.; Balac, M. Synthetic population and travel demand for Paris and Ile-de-France based on open and publicly available data. Transp. Res. Part C-Emerg. Technol. 2021, 130, 103291. [Google Scholar] [CrossRef]
- Patel, V.; Chaturvedi, M.; Srivastava, S. Comparison of SUMO and SiMTraM for Indian Traffic Scenario Representation. In Proceedings of the 11th International Conference on Transportation Planning and Implementation Methodologies for Developing Countries (TPMDC), Mumbai, India, 10–12 December 2014; pp. 400–407. [Google Scholar]
- Onelcin, P.; Mutlu, M.M.; Alver, Y. Evacuation plan of an industrial zone: Case study of a chemical accident in Aliaga, Turkey and the comparison of two different simulation softwares. Saf. Sci. 2013, 60, 123–130. [Google Scholar] [CrossRef]
- Yang, J.H.; Sun, J. Vehicle path reconstruction using automatic vehicle identification data: An integrated particle filter and path flow estimator. Transp. Res. Part C-Emerg. Technol. 2015, 58, 107–126. [Google Scholar] [CrossRef]
- Sun, H.Z.; Jiang, P.; She, Q.S.; Yu, C.; Lin, H.Z.; Wu, X.; Lin, G. Excessive-emission vehicles real-time track matching algorithm based on road network topology and weights. In Proceedings of the 38th Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 6325–6332. [Google Scholar]
- Wang, L.F. Study on Technology and Method of Tracking Survey of Running Vehicles Based on Plate Number. PhD Thesis, Chang’an University, Xian, China, 2013. [Google Scholar]
- Ruan, S.B.; Wang, F.J.; Ma, D.F.; Jin, S.; Wang, D.H. Vehicle trajectory extraction algorithm based on license plate recognition data. J. Zhejiang Univ. Eng. Sci. 2018, 52, 836–844. [Google Scholar]
- Cao, Q.; Ren, G.; Li, D.W.; Ma, J.S.; Li, H.J. Semi-supervised route choice modeling with sparse Automatic vehicle identification data. Transp. Res. Part C-Emerg. Technol. 2020, 121, 102857. [Google Scholar] [CrossRef]
- Jafari, A.; Both, A.; Singh, D.; Gunn, L.; Giles-Corti, B. Building the road network for city-scale active transport simulation models. Simul. Model. Pract. Theory 2022, 114, 102398. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Simulation Model | Common Software | Granularity | Object Description | Ease of Data Fusion |
|---|---|---|---|---|
| Macroscopic simulation | TransCAD [17,18], VISUM [19] | lower | traffic flow | lower |
| Mesoscopic simulation | MATSim [20], DTALite [21], DynusT [22,23] | medium | specific vehicles | medium |
| Microscopic simulation | VISSIM [24], SUMO [25] | higher | each vehicle | higher |
| Researchers | Simulation Demand Data | Simulation Network Data | Main Work |
|---|---|---|---|
| Griggs et al. [10] | Real and virtual vehicle | Network of the local University’s campus | Present a simulation platform to examine real-world driver responses to feedback control. |
| Zhang et al. [16] | GPS (LBS) | Network of Shanghai | Highlight the potential of MATSim in simulating large-scale dynamic transport scenarios. |
| Horl and Balac [35] | Census data set | Network of Paris and its surroundings | Introduce the process for generating a synthetic travel demand based on open data/software. |
| Gurrame et al. [15] | Phone GPS (LBS) | Network of the entire North America | Illustrate the value of data-driven simulations in estimating and predicting travel demand. |
| Patel et al. [36] | Virtual vehicle | Two roads (34 km and 8 km) in the city | Upgrade the SiMTraM model to better suit Indian traffic scenarios. |
| Onelcin et al. [37] | Survey data | Network of the town with a petrochemical enterprise | Conduct evacuation time estimates and obtain reliable evacuation simulation results. |
| Initial Network | Road Segments | Key Road Nodes | ||||||
|---|---|---|---|---|---|---|---|---|
| Initial tag | name | length | limit | / | type | lanes | name | lat and lon |
| MATSim tag | ID | length | limit | capacity | type | lanes | ID | X and Y |
| MATSim Network | Links | Nodes | ||||||
| Hierarchy | Highway Type | Lane Capacity (Vehicles/Hour) |
|---|---|---|
| 1 | Motorway | 2000 |
| 2 | Trunk | 1500 |
| 3 | Primary | 1500 |
| 4 | Secondary | 1000 |
| 5 | Tertiary | 600 |
| Time Period | Initial RMSE | Final RMSE | Initial NRMSE | Final NRMSE |
|---|---|---|---|---|
| 1 | 4.117 | 1.951 | 0.442 | 0.209 |
| 2 | 4.760 | 1.912 | 0.572 | 0.230 |
| 3 | 5.071 | 2.156 | 0.649 | 0.276 |
| 4 | 5.379 | 2.106 | 0.732 | 0.287 |
| 5 | 5.510 | 1.718 | 0.724 | 0.226 |
| 6 | 5.440 | 1.756 | 0.722 | 0.233 |
| 7 | 5.424 | 2.063 | 0.670 | 0.255 |
| 8 | 4.974 | 1.801 | 0.618 | 0.224 |
| All | 5.217 | 1.939 | 0.638 | 0.241 |
| Performance | DDSM | SP | TDSP |
|---|---|---|---|
| LCR | 84.78% (±0.444%) | 77.98% (±0.599%) | 81.96% (±0.489%) |
| PLCR | 85.02% (±0.449%) | 79.19% (±0.683%) | 82.92% (±0.455%) |
| AVG | 84.90% (±0.438%) | 78.59% (±0.648%) | 82.44% (±0.465%) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, H.; Shi, Z.; Chen, Y.; Zhu, Z.; Chen, X. Transportation Simulation Modeling and Location-Based Services Data Completion Based on a Data and Model Dual-Driven Approach. Appl. Sci. 2024, 14, 4366. https://doi.org/10.3390/app14114366
Wang H, Shi Z, Chen Y, Zhu Z, Chen X. Transportation Simulation Modeling and Location-Based Services Data Completion Based on a Data and Model Dual-Driven Approach. Applied Sciences. 2024; 14(11):4366. https://doi.org/10.3390/app14114366
Chicago/Turabian StyleWang, Hantong, Ziyi Shi, Yong Chen, Zheng Zhu, and Xiqun Chen. 2024. "Transportation Simulation Modeling and Location-Based Services Data Completion Based on a Data and Model Dual-Driven Approach" Applied Sciences 14, no. 11: 4366. https://doi.org/10.3390/app14114366
APA StyleWang, H., Shi, Z., Chen, Y., Zhu, Z., & Chen, X. (2024). Transportation Simulation Modeling and Location-Based Services Data Completion Based on a Data and Model Dual-Driven Approach. Applied Sciences, 14(11), 4366. https://doi.org/10.3390/app14114366