
Intelligent Compaction Measurement Value in Variability Control of Subgrade Compaction Quality


Abstract
:1. Introduction
2. Objective and Scope
3. Methodology
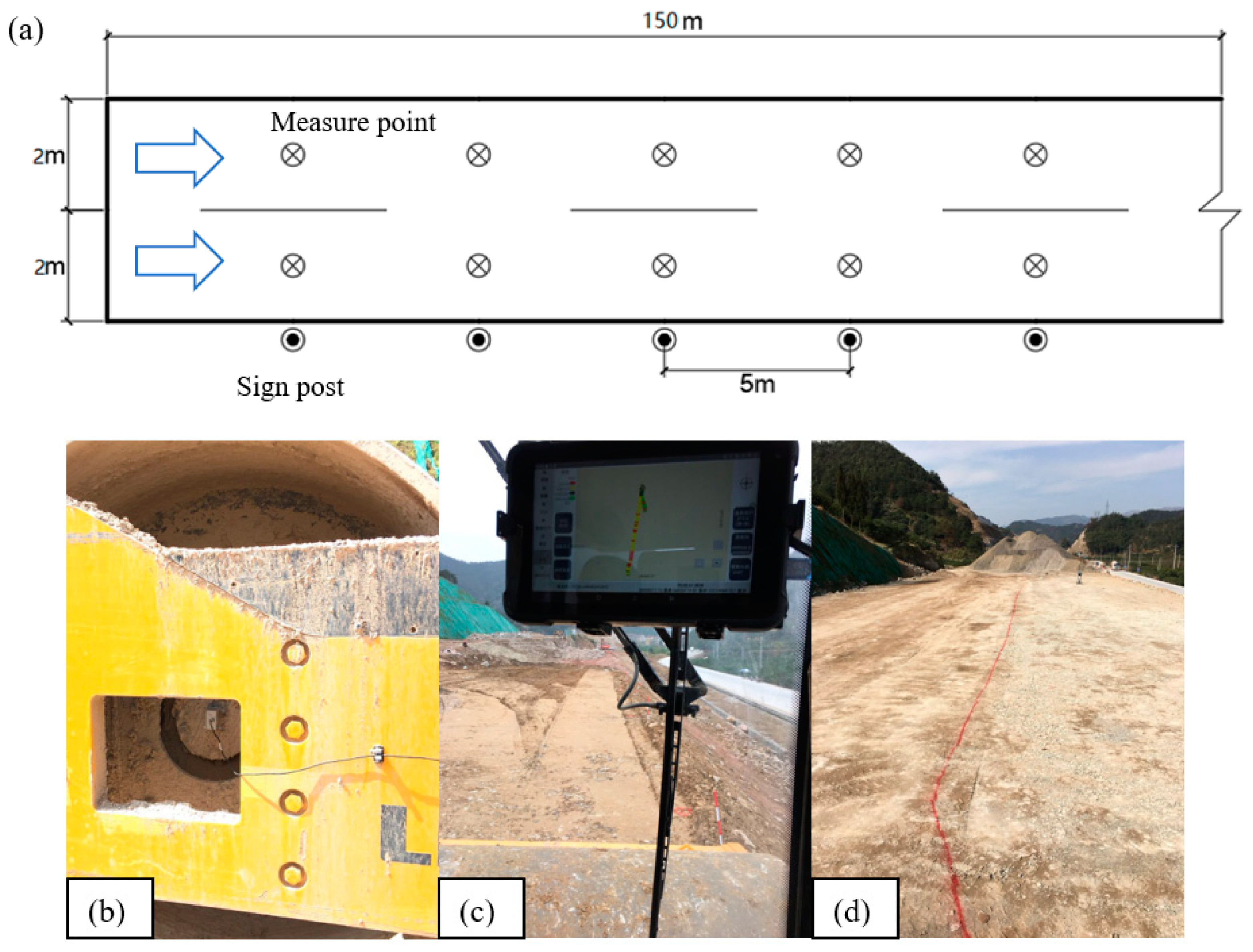
3.1. Field Test of Continuous Compaction Control
3.2. Numerical Simulation of Modulus of Vibration Compaction Evc
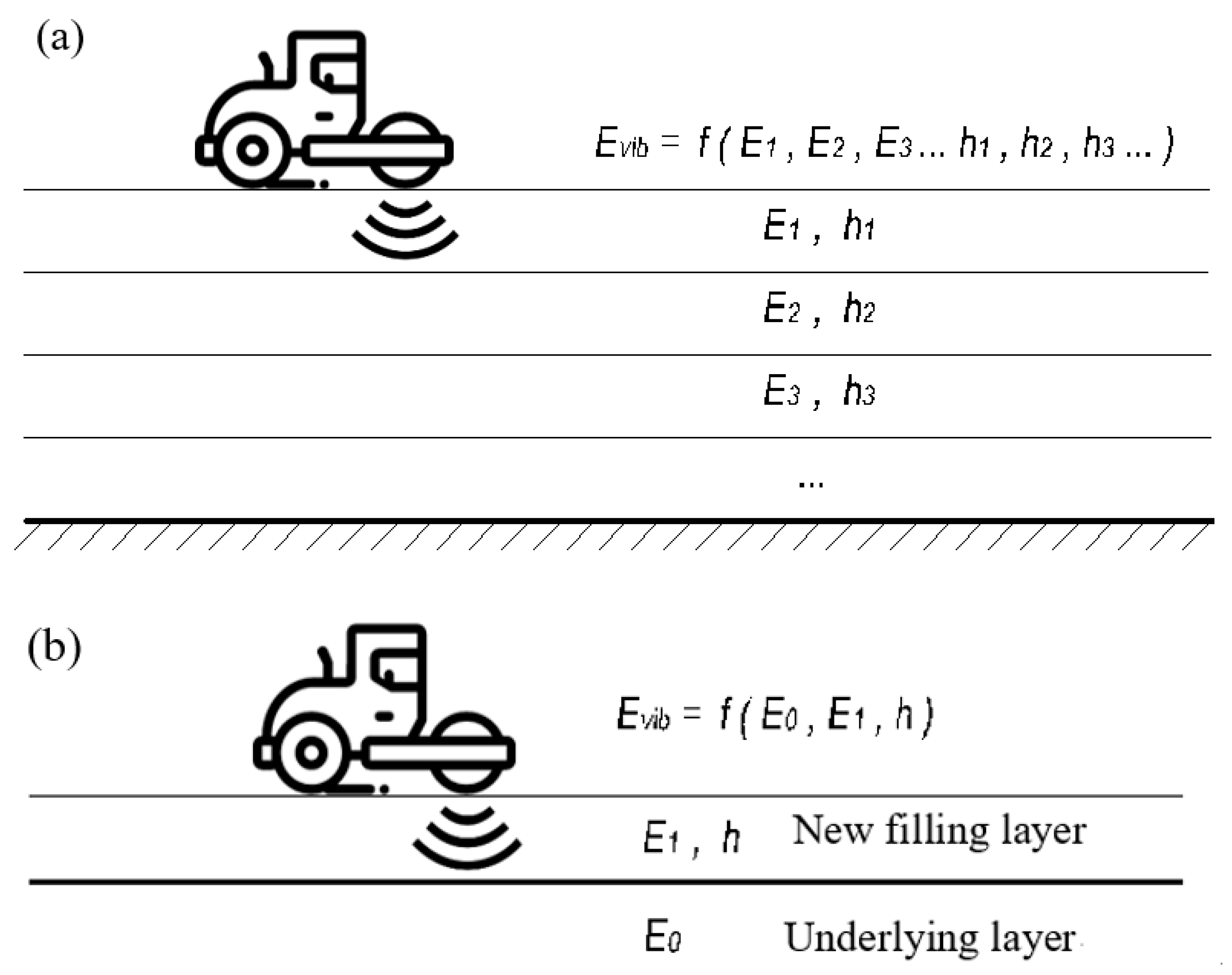
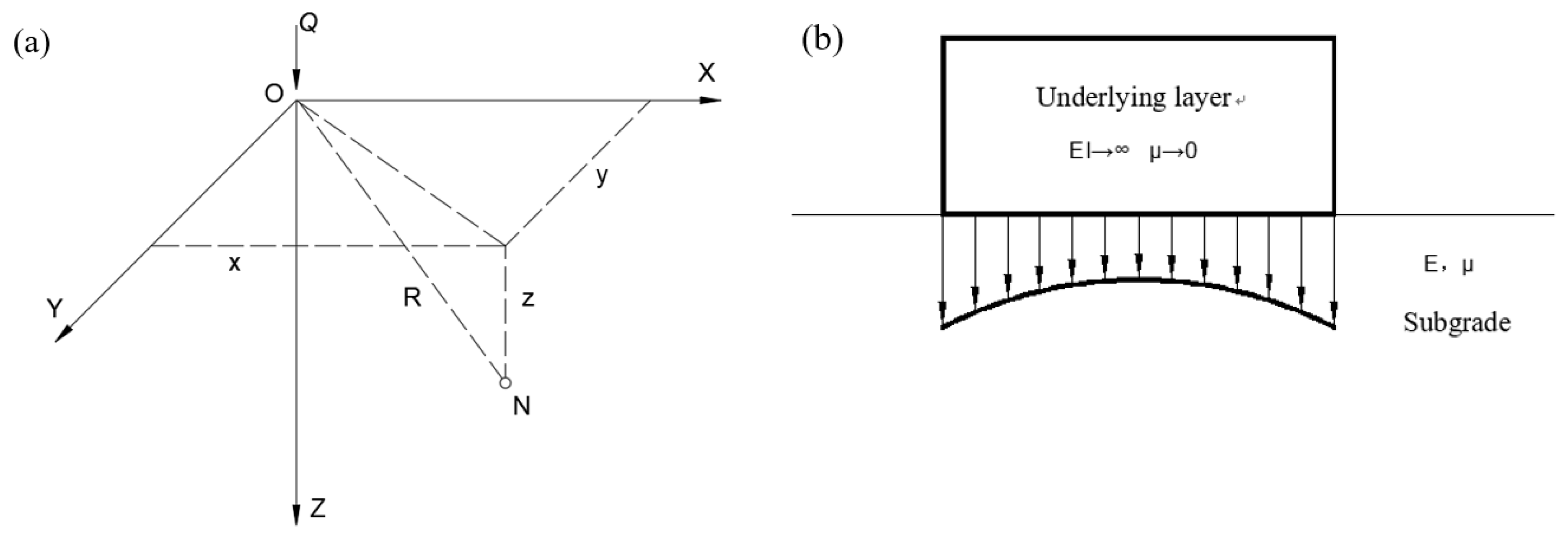
3.2.1. Computing Principle of Evc
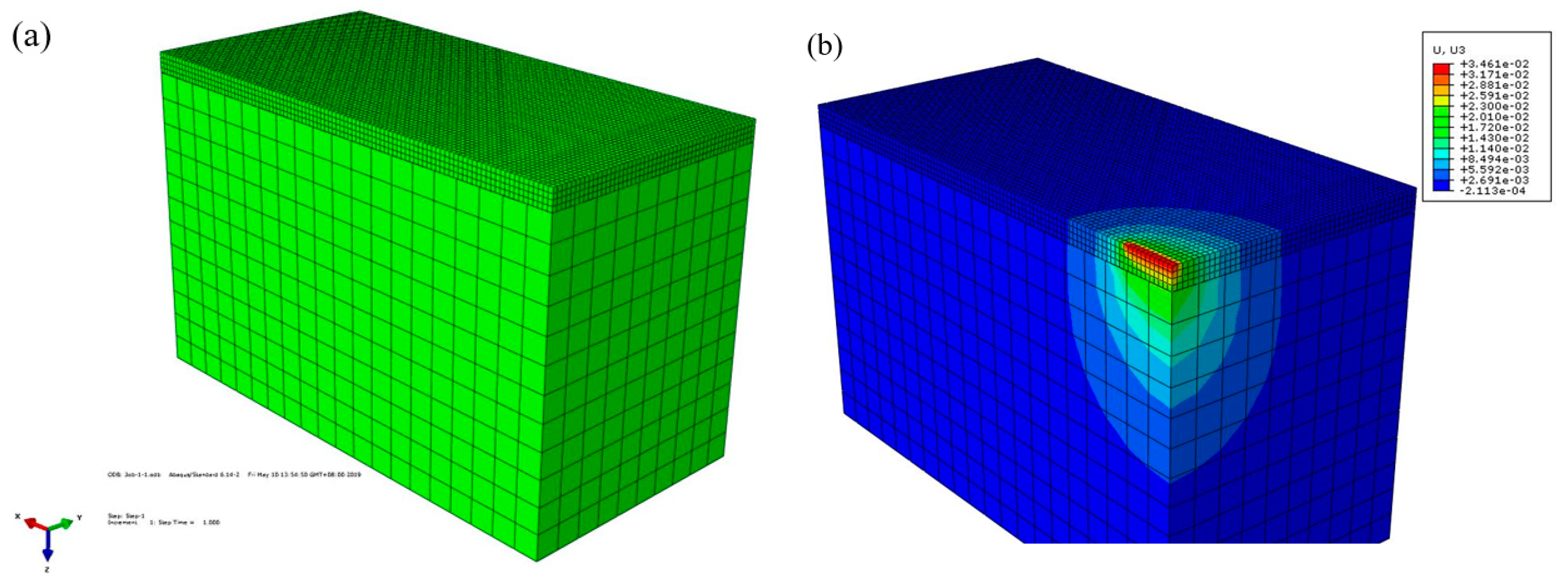
3.2.2. Development of 3D FE Models and Database
4. Results and Discussion
4.1. Variation Laws of Overall Compaction Quality of Subgrade
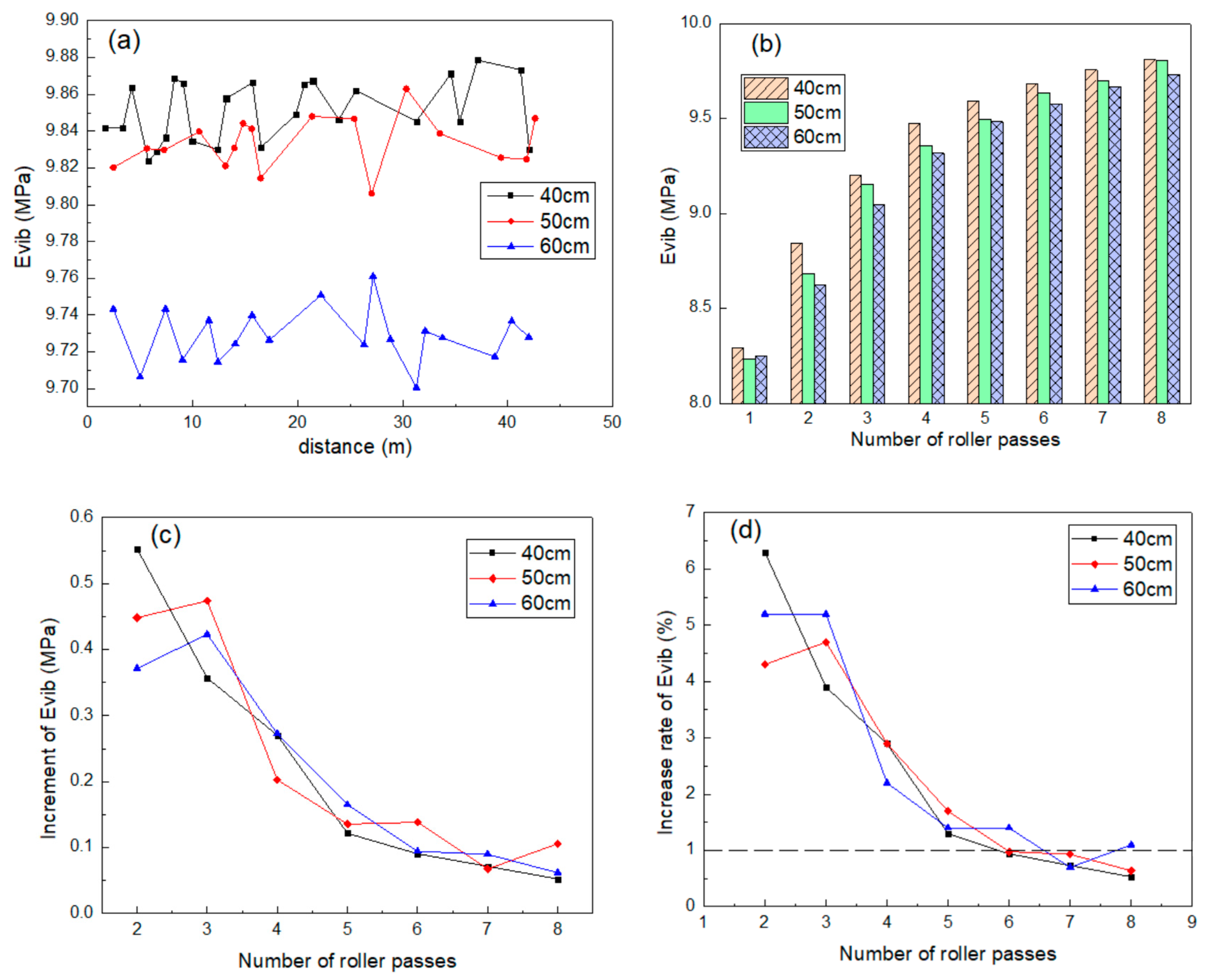
4.1.1. Thickness of Filling Layer
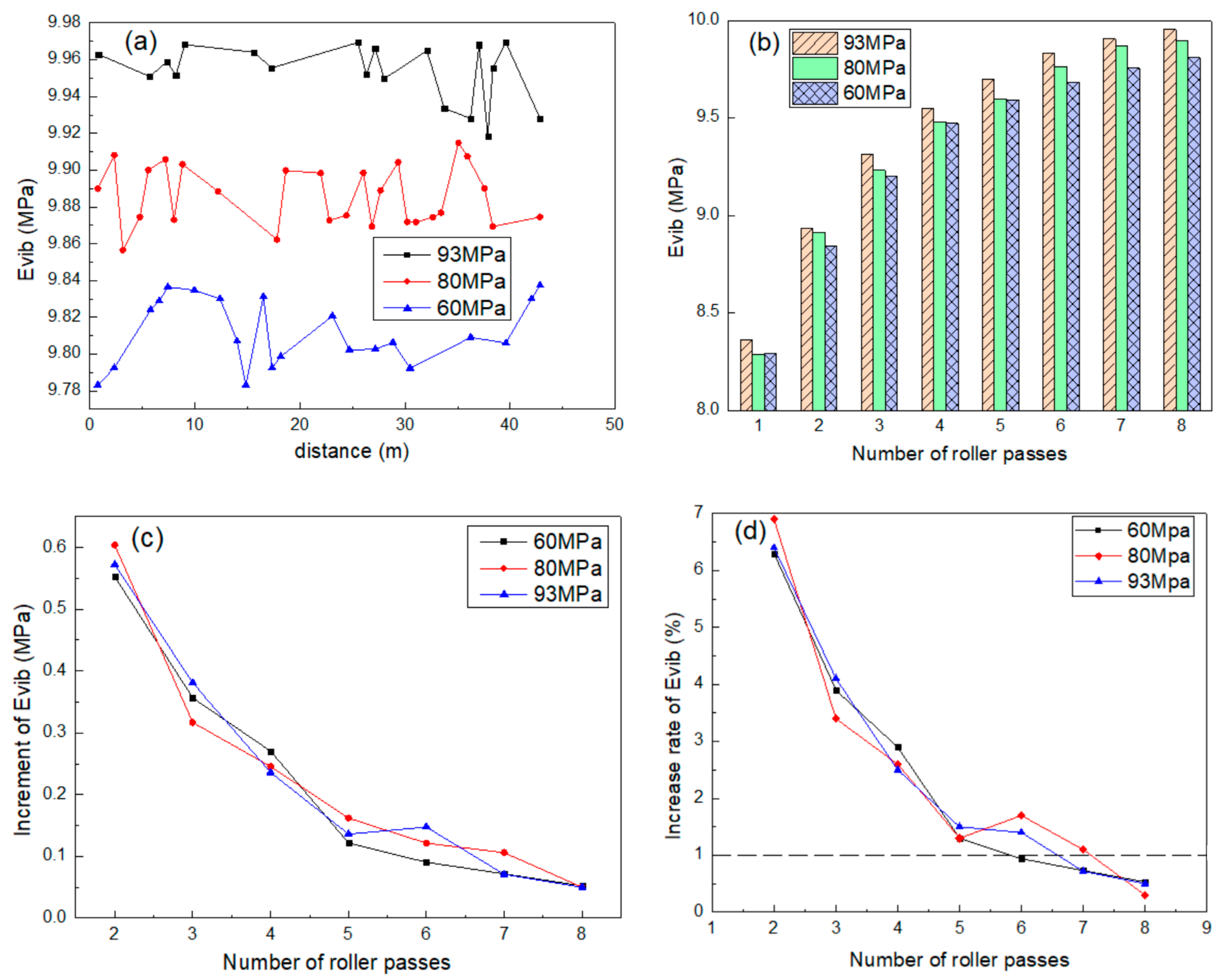
4.1.2. Strength of Underlying Layer
4.1.3. Variability of Evib
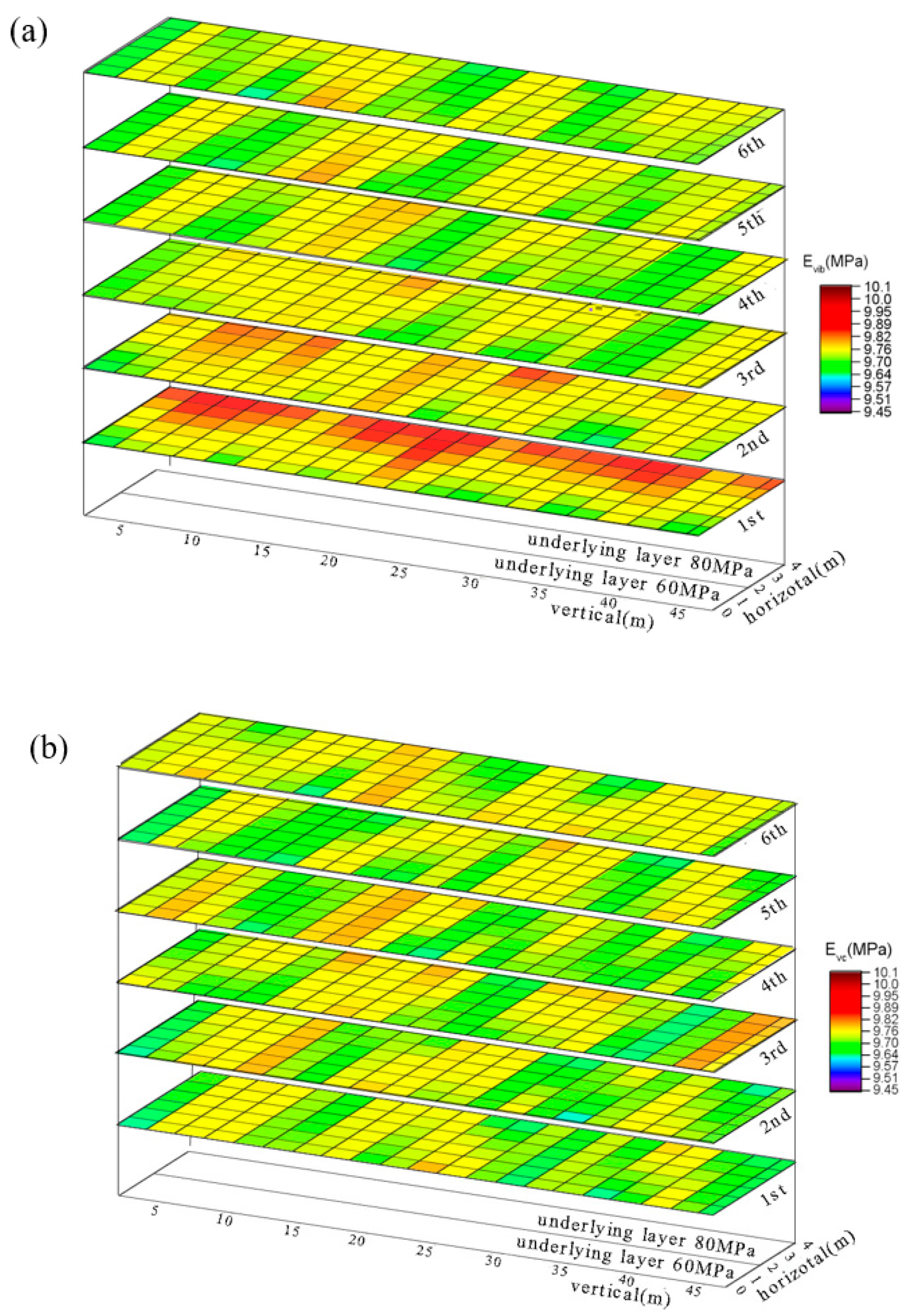
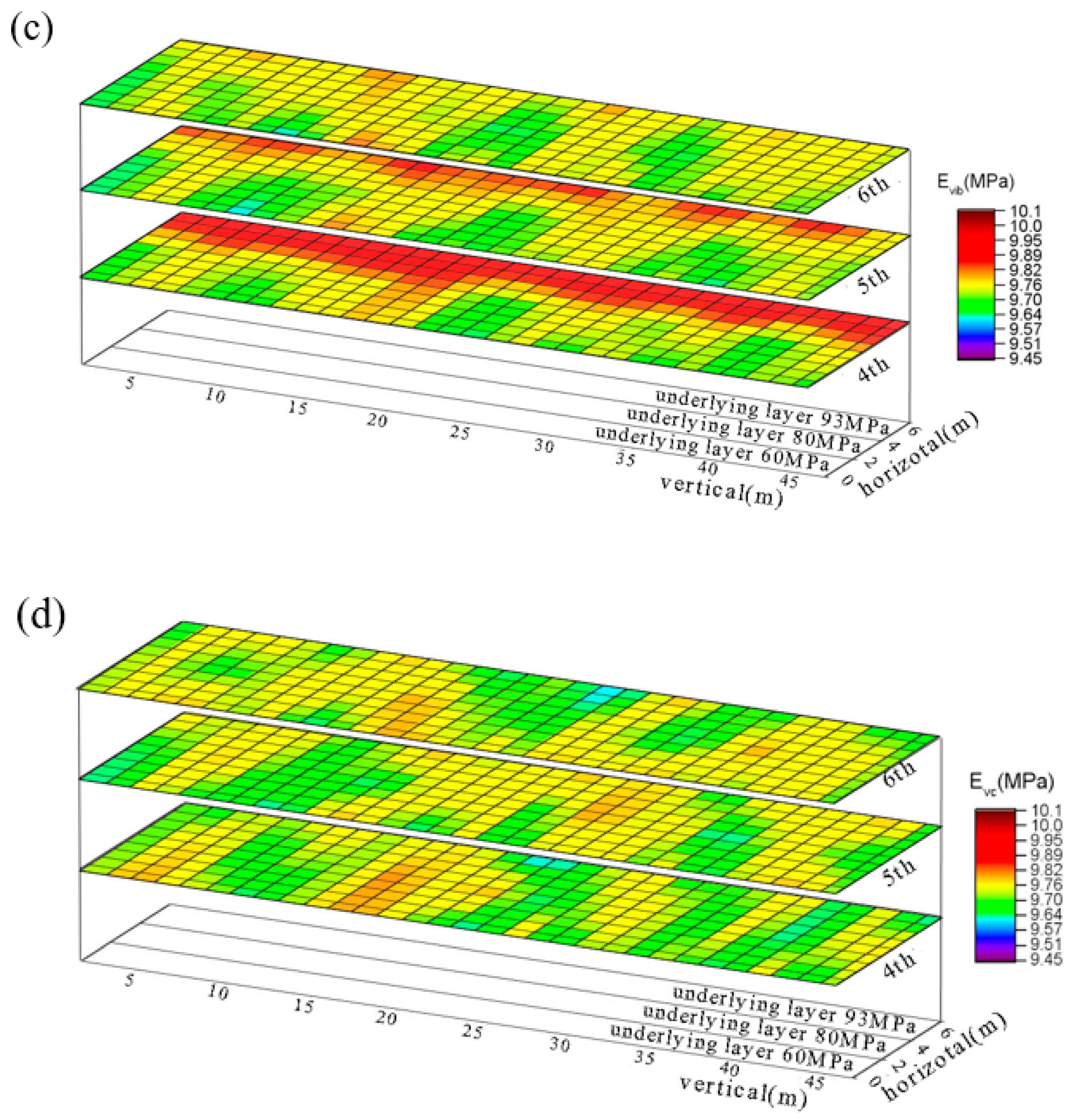
4.2. Comparsion of Evc in Filling Layer and Evib
5. Conclusions
- Intelligent compaction was based on a theoretical concept and field experiment that the real-time vibration response to the subgrade was manifested in compaction indexes. Application of these indexes was able to capture the difference of the subgrade stiffness and use it to estimate the compaction quality.
- In this paper, a detailed method is given to utilize Evc as a real-time index to control the variability of the compaction modulus in the condition which the strength of the underlying layer is large or uneven. The procedure of establishing the database and simulation results based on the elastic double-deck subgrade are also presented.
- A field experiment was conducted on this test strip to analyze the influence law of different thicknesses of the filling layer and the strength of the underlying layer on the subgrade modulus Evib. It can be concluded that the correlation of thickness with the overall compaction quality is negative, and the correlation of strength with that is positive. Furthermore, the over-high strength underlying layer will affect the monitoring value of the traditional continuous compaction control index, so that the measured value is greater than the actual strength of the current roller layer.
- Simulation results of the corresponding Evc were acquired by specific targets of the database. It was concluded that the variability in Evib of the subgrade decreases gradually with an increasing number of filling layers, and the variability in Evc of the filling layer remains at a lower level.
- The modulus variability in the cut to fill subgrade mainly comes from the strength difference in the underlying layer, not the thickness difference in the filling layer. It was suggested that the modulus variability in the filling layer may increase with supplementary roller compaction, only considering the variability in Evib of the subgrade.
- A critical aspect of this proposed index Evc is that it is able to improve the quality control of the subgrade stiffness. It was demonstrated through filed tests that Evib can be used to monitor the overall compaction quality in real time, and Evc was extracted to identify the compaction quality of the filling layer.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Mooney, M.A.; Adam, D. Vibratory Roller Integrated Measurement of Earthwork Compaction: An Overview. In Proceedings of the FMGM2007-Intelligent Symposium on Field Measurements in Geomechanics, Boston, MA, USA, 24–27 September 2007. [Google Scholar]
- Fhwa. FHWA/TPF Research Project Accelerated Implementation of Intelligent Compaction Technology for Embankment Subgrade Soils, Aggregate Base, and Asphalt Pavement Materials.U.S.; Federal Highway Administration: Washington, DC, USA, 2011.
- Zhu, X.; Bai, S.; Xue, G.; Yang, J.; Cai, Y.; Hu, W.; Jia, X.; Huang, B. Assessment of compaction quality of multi-layer pavement structure based on intelligent compaction technology. Constr. Build. Mater. 2018, 161, 316–329. [Google Scholar] [CrossRef]
- Thurner, H.; Forsblad, L. Compaction Meter on Vibrating Rollers; Transportation Research Board: Washington, DC, USA, 1978. [Google Scholar]
- Richart, F.E.; Hall, J.R.; Woods, R.D. Vibrations of Soils and Foundations; Prentice Hall: Englewood Cliffs, NJ, USA, 1970. [Google Scholar]
- Thurner, H.; Forssblad, L. The Compaction Meter—A Modern Method for the Surveillance and Control of Compaction. Rev. Gen. Routes Aerodr. 1979, 36, 67–71. [Google Scholar]
- White, D.; Thompson, M.; Vennapusa, P.; Siekmeier, J. Implementing intelligent compaction specification on Minnesota TH-64: Synopsis of measurement values, data management, and geostatistical analysis. Transp. Res. Rec. J. Transp. Res. Board 2008, 2045, 1–9. [Google Scholar] [CrossRef]
- Roller-Integrated Continuous Compaction Control (CCC): Technical Contractual Provisions, Recommendations; ISSMGE: London, UK, 2005.
- Vennapusa, P.R.; White, D.J.; Morris, M.D. Geostatistical analysis or spatially referenced roller-Integrated Compaction Measurements. J. Geotech. Geoenviron. Eng. 2009, 136, 813–822. [Google Scholar] [CrossRef]
- White, D.J.; Vennapusa, P.; Gieselman, H.; Zhang, J.; Eidem, M. Accelerated Implementation of Intelligent Compaction Technology for Embankment Subgrade Soils, Aggregate Base, and Asphalt Pavement Materials: US 12 Marmarth, North Dakota; Final Report ER10-08 US12, ND Field Project; Iowa State University: Ames, IA, USA, 2010. [Google Scholar]
- Pistrol, J.; Villwock, S.; Völkel, W.; Kopf, F.; Adam, D. Continuous Compaction Control (CCC) with Oscillating Rollers. Procedia Eng. 2016, 143, 514–521. [Google Scholar] [CrossRef]
- Li, J. Evaluation of Intelligent Compaction Control in the M-189 Reconstruction Project at Iron River, Michigan. Master’s Thesis, Michigan Technological University, Houghton, MI, USA, 2013. [Google Scholar]
- Aouad, M.F.; Stokoe, K.H., II; Briggs, R.C. Stiffness of Asphalt Concrete Surface Layers from Stress Wave Measurements; Transportation Research Record 1384: Washington, DC, USA, 1993; pp. 29–35. [Google Scholar]
- Von Quintus, H.L.; Rao, C.; Minchin, R.E.; Nazarian, S.; Maser, K.R.; Prowell, B.D. NDT Technology for Quality Assurance of HMA Pavement Construction; NCHRP Report No. 626; Transportation Research Board: Washington, DC, USA, 2009; 133p. [Google Scholar]
- Meehan, C.L.; Cacciola, D.V.; Tehrani, F.S.; Baker, W.J., III. Assessing Soil Compaction using Continuous Compaction Control and Location-Specific In Situ Tests. Autom. Constr. 2017, 73, 31–44. [Google Scholar] [CrossRef]
- Hu, W.; Shu, X.; Huang, B.; Woods, M.E. An Examination of Compaction Meter Value for Asphalt Pavement Compaction Evaluation. Int. J. Pavement Eng. 2018, 19, 447–455. [Google Scholar] [CrossRef]
- Ling, J.; Lin, S.; Qian, J.; Zhang, J.; Han, B.; Liu, M. Continuous Compaction Control Technology for Granite Residual Subgrade Compaction. J. Mater. Civ. Eng. 2018, 30, 04018316.1–04018316.9. [Google Scholar] [CrossRef]
- Zhang, D.; Jiang, H.; Gao, M.; Zhang, J.; Xiang, W.; Yan, X.; Guo, D.; Zhao, C.; Wu, L. Quality Acceptance Methods and Standards for Continuous Compaction Control Technology. Int. J. Transp. Eng. Technol. 2019, 5, 82–87. [Google Scholar]
- Tao, M.; Zhou, F. Simulation analysis of dynamic response of subgrade vibration compaction. Chin. J. Highw. 2022, 5, 1–11. [Google Scholar]
- Xu, Q.W.; Chang, G.K.; Gallivan, V.L.; Horan, R.D. Influences of intelligent compaction uniformity on pavement performances of hot mix asphalt. Constr. Build. Mater. 2012, 30, 746–752. [Google Scholar] [CrossRef]
- Ma, Y.; Luan, Y.C.; Zhang, W.G.; Zhang, Y.Q. Numerical simulation of intelligent compaction for subgrade construction. J. Cent. South Univ. 2020, 27, 2173–2184. [Google Scholar] [CrossRef]
- Carrasco, C.; Tirado, C.; Wang, H. Collaborative Proposal: Numerical Simulation of Intelligent Compaction Technology for Construction Quality Control; Report of CAIT-UTC-029; Texas Department of Transportation: Austin, TX, USA, 2014.
- Yang, C.W.; Zhang, L.; Han, Y.; Cai, D.; Wei, S. Study on the transmission and evolution characteristics of vibration wave from vibratory roller to filling materials based on the field test. Appl. Sci. 2020, 10, 2008. [Google Scholar] [CrossRef]
- Facas, N.W.; Susante, P.J.; Mooney, M.A. Influence of rocking motion on vibratory roller-based measurement of soil stiffness. J. Eng. Mech. 2010, 136, 898–905. [Google Scholar] [CrossRef]
- Susante, P.J.; Mooney, M.A. Capturing nonlinear vibratory roller compactor behavior through lumped parameter modeling. J. Eng. Mech. 2008, 134, 684–693. [Google Scholar] [CrossRef]
- Liu, D.H.; Li, Z.L.; Liu, J.L. Experimental study on real-time control of roller compacted concrete dam compaction quality using unit compaction energy indices. Constr. Build. Mater. 2015, 96, 567–575. [Google Scholar] [CrossRef]
- White, D.J.; Vennapusa, P.; Tutumluer, E.; Vavrik, W.; Moaveni, M.; Gillen, S. Spatial verification of modulus for pavement foundation system. Transp. Res. Rec. J. Transp. Res. Board 2018, 2672, 333–346. [Google Scholar] [CrossRef]
- Vennapusa, P.K.R.; White, D.J.; Gieselman, H. Influence of Support Conditions on Roller-Integrated Machine Drive Power Measurements for Granular Base. In Contemporary Topics in Ground Modification, Problem Soils, and Geo-Support; ASCE Library: Orlando, FL, USA, 2009; pp. 425–432. [Google Scholar]
- Du, W.Y.; Song, W.P.; Feng, D.C.; Zhang, L.H. Study on GPS Ranging Technology for Intelligent Detection of Subgrade Compaction. Appl. Mech. Mater. 2012, 220–223, 1533–1538. [Google Scholar] [CrossRef]
- Academy of Highway Science, Ministry of Communications of the People’s Republic of China. Regulations for Highway Geotechnical Testing (JTG E40-2007); People’s Transportation Press: Beijing, China, 2010. [Google Scholar]
- Von Quintus, H.L. Evaluation of Intelligent Compaction Technology for Densification of Roadway Subgrades and Structural Layers; Pavement Layers; Applied Research Associates Inc.: Albuquerque, NM, USA, 2010. [Google Scholar]
- Barman, M.; Nazari, M.; Imran, S.A.; Commuri, S.; Zaman, M.; Beainy, F.; Singh, D. Quality control of subgrade soil using intelligent compaction. Innov. Infrastruct. Solut. 2016, 1, 23. [Google Scholar] [CrossRef]
- Hu, F.; Xu, C.; Li, H.; Li, S.; Yu, Z.; Li, Y.; He, X. Particles interaction forces and their effects on soil aggregates breakdown. Soil Tillage Res. 2015, 147, 1–9. [Google Scholar] [CrossRef]
- Hongzhu, K.; Bingzhang, N.; Li, Z. Study on compaction of high liquid limit clay by vibratory roller with large excitation force. Road Constr. Mach. Constr. Mech. 2014, 31, 45–49. [Google Scholar]
- Cheng, W. Construction Technology of Earth-Rock Mixed Filling Subgrade. Shanxi Archit. 2011, 37, 138–139. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maximum Dry Density (g/cm3) | Optimum Moisture Content (%) | Liquid Limit (%) | Plastic Limit (%) | Plastic Index (%) | Particle Content (%) | Maximum Particle Diameter (mm) |
|---|---|---|---|---|---|---|
| p > 5.0 mm | ||||||
| 2.12 | 11.2 | 30 | 23 | 7 | 59.6 | 304 |
| Parameter | Liu Gong CLG1622E |
|---|---|
| Total Static Mass (kg) | 22,000 |
| Rated Power (kw/rpm) | 132/1800 |
| Eccentric Force (kN) | 290 |
| Excitation Frequency (Hz) | 32 |
| Excitation Amplitude (mm) | 1.0 |
| Working Width (mm) | 2130 |
| Total sizes (Length × Wide × Height) (mm) | 6450 × 2340 × 3050 |
| Experimental Condition | Thickness of Filling Layer (cm) | Strength of Underlying Layer Evib (MPa) | Roller Velocity (km/h) |
|---|---|---|---|
| ① | 40 | 93 | 3.0 |
| ② | 40 | 80 | 3.0 |
| ③ | 40 | 60 | 3.0 |
| ④ | 50 | 60 | 3.0 |
| ⑤ | 60 | 60 | 3.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Qian, J.; Ling, J. Intelligent Compaction Measurement Value in Variability Control of Subgrade Compaction Quality. Appl. Sci. 2024, 14, 68. https://doi.org/10.3390/app14010068
Wang Z, Qian J, Ling J. Intelligent Compaction Measurement Value in Variability Control of Subgrade Compaction Quality. Applied Sciences. 2024; 14(1):68. https://doi.org/10.3390/app14010068
Chicago/Turabian StyleWang, Zhiwen, Jinsong Qian, and Jianming Ling. 2024. "Intelligent Compaction Measurement Value in Variability Control of Subgrade Compaction Quality" Applied Sciences 14, no. 1: 68. https://doi.org/10.3390/app14010068
APA StyleWang, Z., Qian, J., & Ling, J. (2024). Intelligent Compaction Measurement Value in Variability Control of Subgrade Compaction Quality. Applied Sciences, 14(1), 68. https://doi.org/10.3390/app14010068