
Two-Way Shape Memory Effect of a Shape Memory Composite Strip


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Thermomechanical Properties of the SMA Composite Strip
2.1. Materials and Fabrication Method
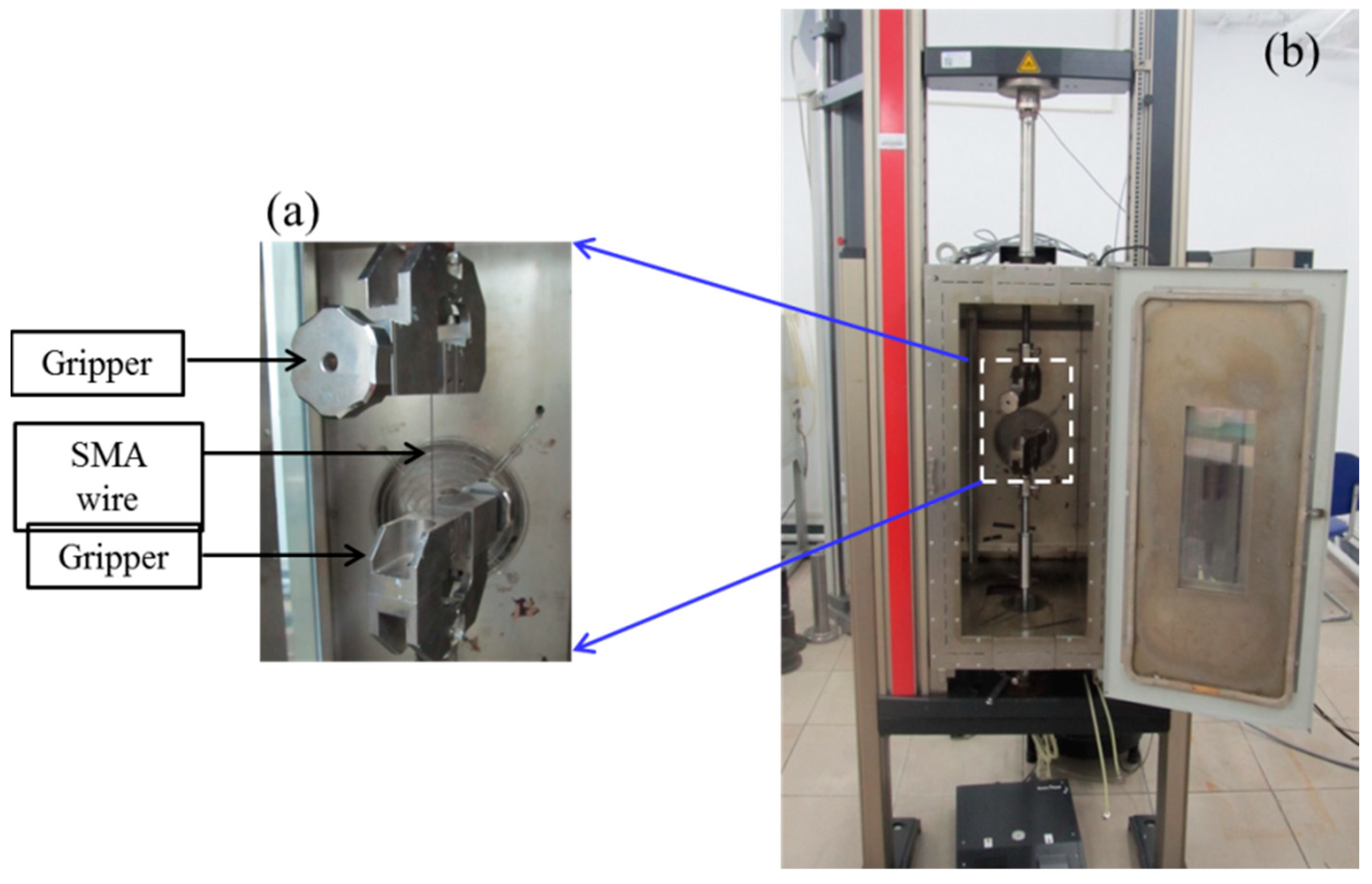
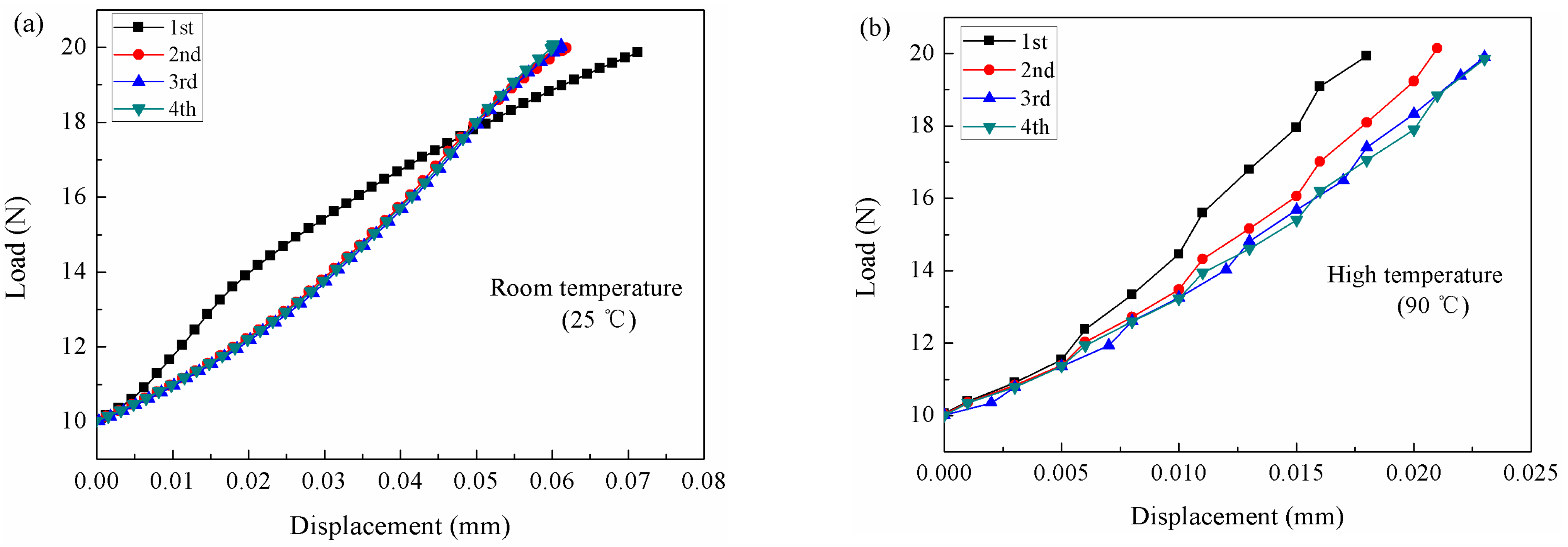
2.2. Tensile Test of SMA Wire at Different Temperatures
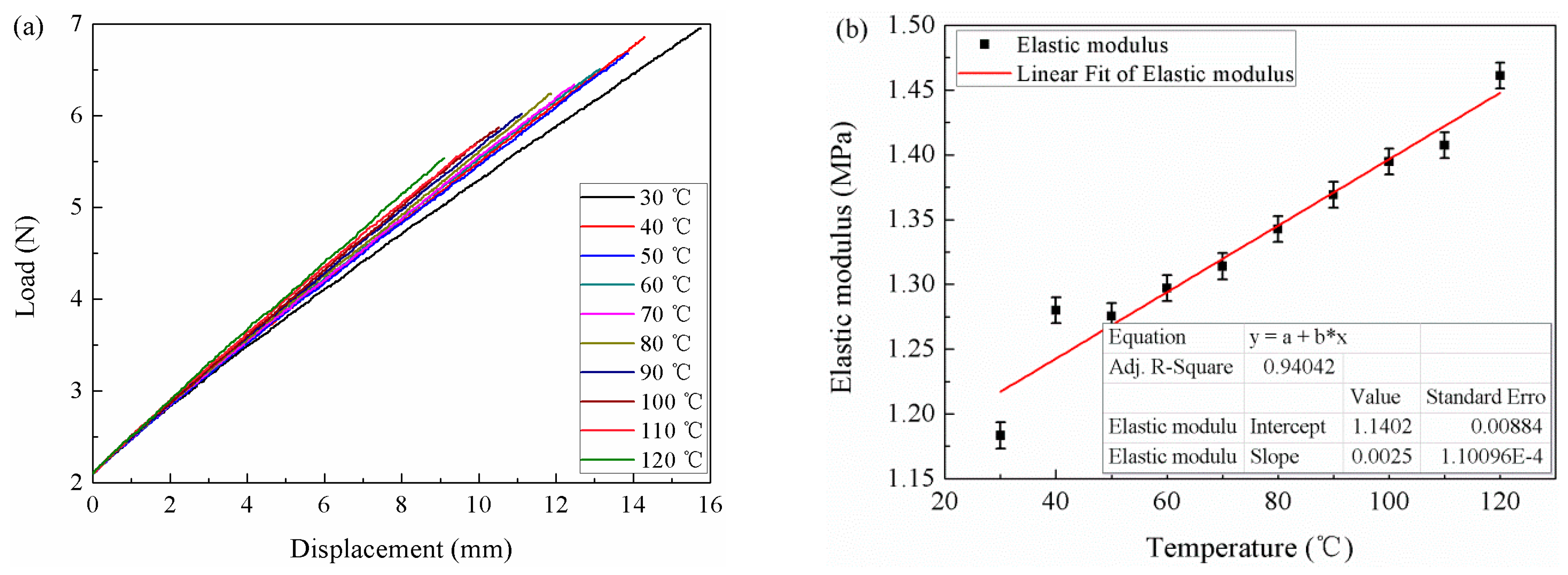
2.3. Tensile Test of Rubber at Different Temperatures
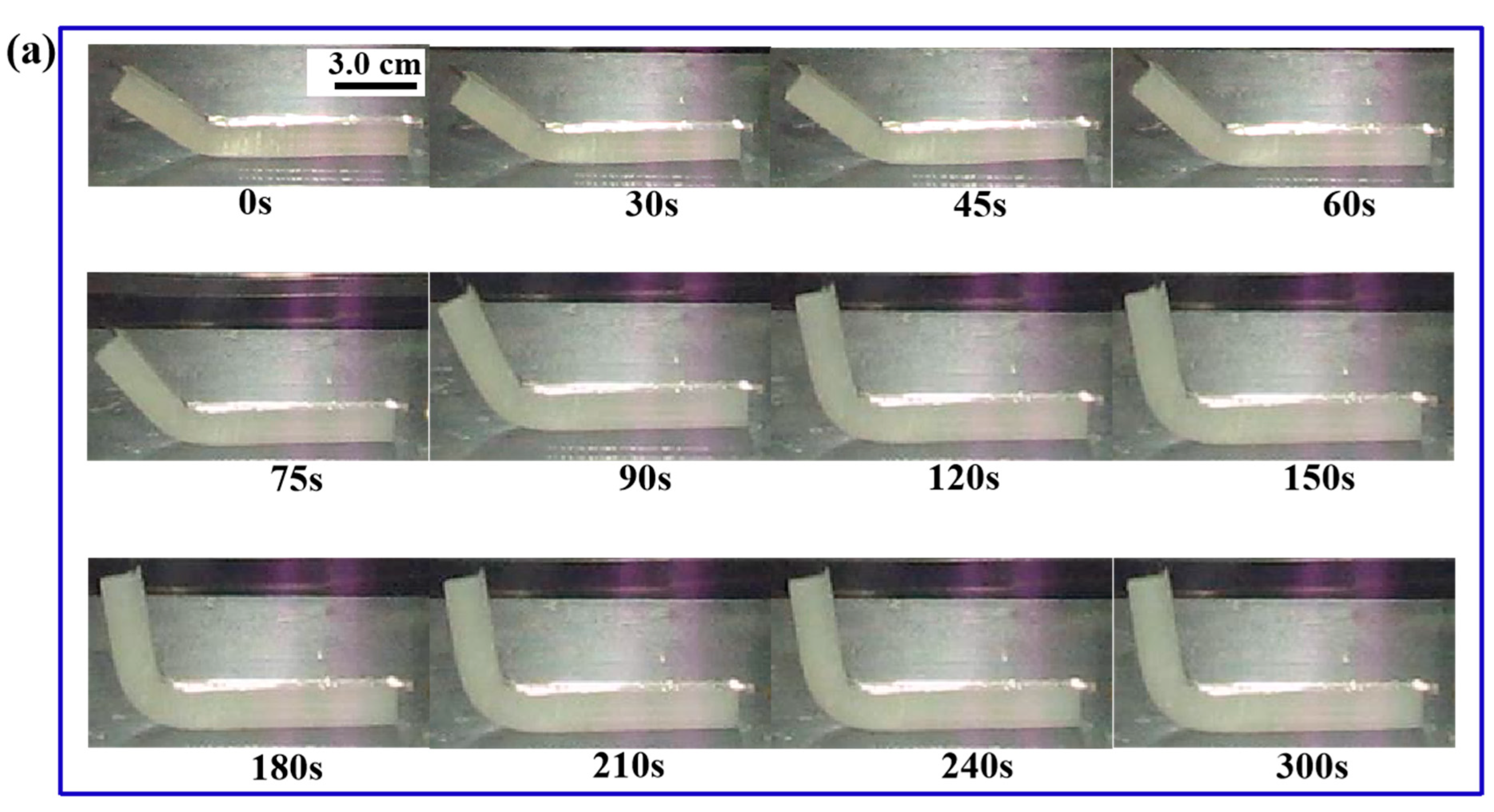
2.4. Two-Way SME of the Rubber-Based SMA Composite Strip
2.5. Four-Point Bending Test of the SMP-Based SMA Strip
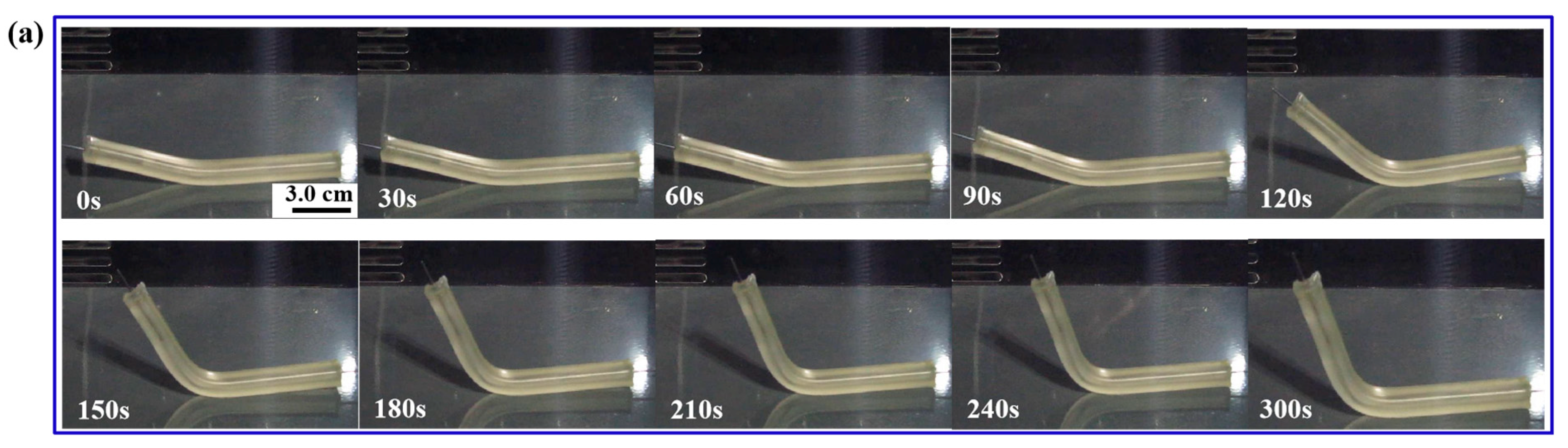
2.6. Two-Way SME of the SMP-Based SMA Composite Strip
3. Results and Discussion
3.1. Static Tensile Results of the SMA Wire under Isothermal Conditions
3.2. Static Tensile Results of Rubber under Isothermal Conditions
3.3. Two-Way SME of the Rubber-Based SMA Strip
3.4. Stiffness of the Composite Strip at Room Temperature
3.5. Two-Way SME of the SMP-Based SMA Strip
3.6. Cyclic Deformation of Rubber and SMP-Based SMA Strips
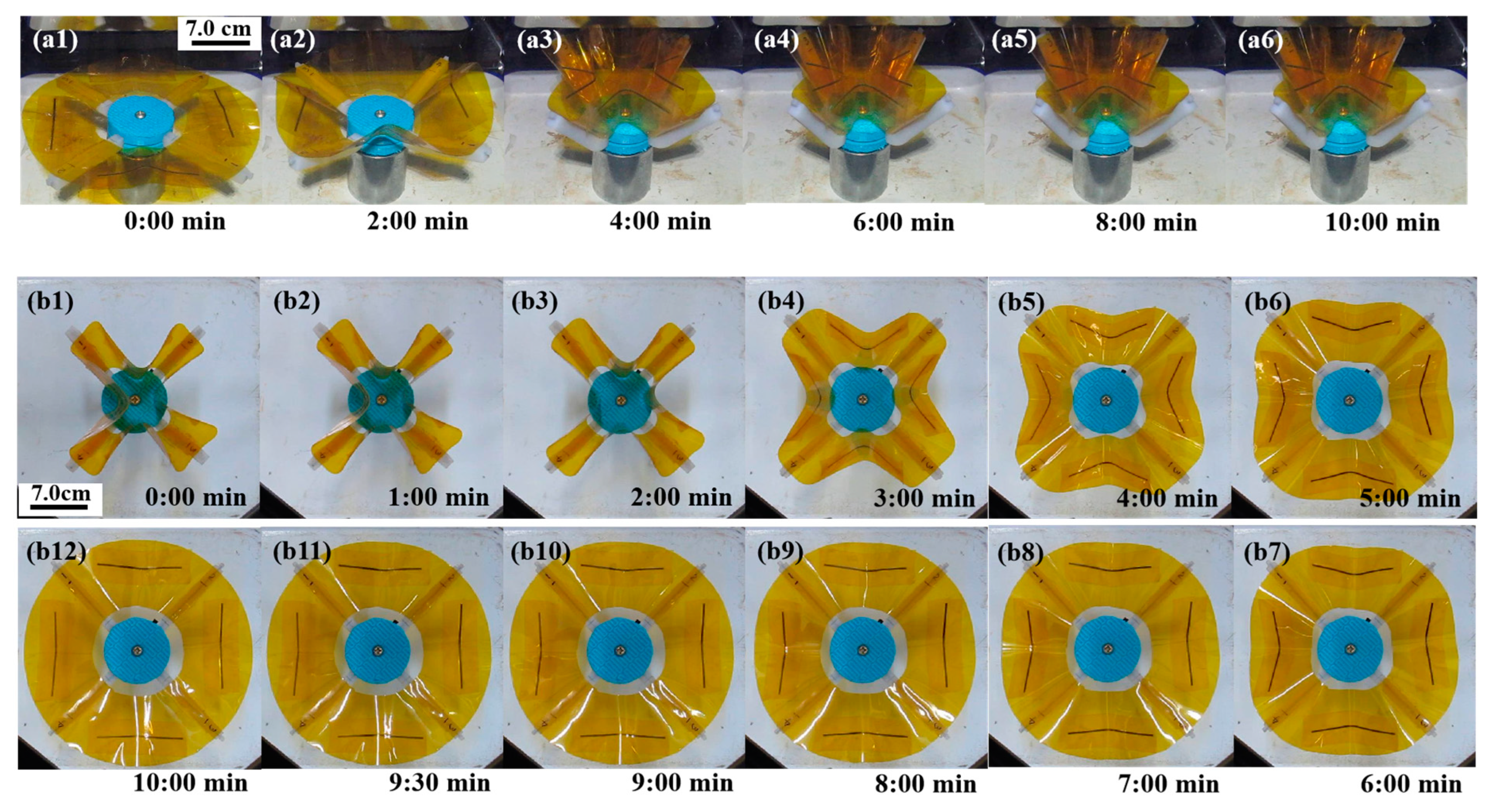
4. Future Applications
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Song, G.B.; Ma, N.; Li, H.N. Applications of shape memory alloys in civil structures. Eng. Struct. 2006, 28, 1266–1274. [Google Scholar] [CrossRef]
- Morgan, N.B. Medical shape memory alloy applications-the market and its products. Mater. Sci. Eng. A 2004, 378, 16–23. [Google Scholar] [CrossRef]
- Hartl, D.J.; Lagoudas, D.C. Aerospace applications of shape memory alloys. Proc. Inst. Mech. Eng. 2007, 221, 535–552. [Google Scholar] [CrossRef]
- Choyal, V.; Khan, S.; Mani, P.S.S.; Palani, I.A.; Singh, P. Active and passive multicycle actuation characteristics of shape memory alloy-based adaptive composite structures. Smart Mater. Struct. 2021, 30, 095022. [Google Scholar] [CrossRef]
- Shelyakov, A.V.; Sitnikov, N.N.; Koledov, V.V.; Kuchin, D.S.; Irzhak, A.V.; Tabachkova, N.Y. Melt-spun thin ribbons of shape memory TiNiCu alloy for micromechanical applications. Int. J. Smart Nano Mater. 2011, 2, 68–77. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, Y.Q.; Yao, T.; Feng, X.J. A flexible carbon fibre-based electrothermal film for fast actuation of shape memory alloy sheets. Smart Mater. Struct. 2022, 31, 045019. [Google Scholar] [CrossRef]
- Akbari, S.; Sakhaei, A.H.; Panjwani, S.; Kowsari, K.; Ge, Q. Shape memory alloy based based 3D printed composite actuators with variable stiffness and large reversible deformation. Sens. Actuators A Phys. 2021, 321, 112598. [Google Scholar] [CrossRef]
- Xie, T. Tunable polymer multi-shape memory effect. Nature 2010, 464, 267–270. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.J.; Du, H.Y.; Liu, L.W.; Leng, J.S. Shape memory polymers and their composites in aerospace applications: A review. Smart Mater. Struct. 2014, 23, 023001. [Google Scholar] [CrossRef]
- Meng, Q.H.; Hu, J.L. A review of shape memory polymer composites and blends. Compos. Part A 2009, 40, 1661–1672. [Google Scholar] [CrossRef]
- Lee, H.T.; Seichepine, F.; Yang, G.Z. Microtentacle actuators based on shape memory alloy smart soft composite. Adv. Funct. Mater. 2020, 30, 2002510. [Google Scholar] [CrossRef]
- Ashir, M.; Nocke, A.; Cherif, C. Development of shape memory alloy hybrid yarns for adaptive fiber reinforced plastics. Text. Res. J. 2019, 89, 1371–1380. [Google Scholar] [CrossRef]
- Ashir, M.; Hahn, L.; Kluge, A.; Nocke, A.; Cherif, C. Development of innovative adaptive 3D fiber reinforced plastics based on shape memory alloys. Compos. Sci. Technol. 2016, 126, 43–51. [Google Scholar] [CrossRef]
- Ashir, M.; Hahn, L.; Kluge, A.; Nocke, A.; Cherif, C. Electro-bending characterization of adaptive 3D fiber reinforced plastics based on shape memory alloys. Smart Mater. Struct. 2016, 25, 035041. [Google Scholar] [CrossRef]
- Ashir, M.; Nocke, A.; Theiss, C.; Cherif, C. Development of adaptive hinged fiber reinforced plastics based on shape memory alloys. Compos. Struct. 2017, 170, 243–249. [Google Scholar] [CrossRef]
- Ashir, M.; Nocke, A.; Hanke, U.; Cherif, C. Adaptive hinged fiber reinforced plastics with tailored shape memory alloy hybrid yarn. Polym. Compos. 2020, 41, 191–200. [Google Scholar] [CrossRef]
- Wang, W.; Rodrigue, H.; Kim, H.I.; Han, M.W.; Ahn, S.H. Soft composite hinge actuator and application to compliant robotic gripper. Compos. Part B 2016, 98, 397–405. [Google Scholar] [CrossRef]
- Wang, W.; Tang, Y.X.; Li, C. Controlling bending deformation of a shape memory alloy-based soft planar gripper to grip deformable objects. Int. J. Mech. Sci. 2021, 193, 106181. [Google Scholar] [CrossRef]
- Wang, W.; Rodrigue, H.; Ahn, S.H. Soft composite actuator with shape retention capability using embedded fusible alloy structures. Compos. Part B 2015, 78, 507–514. [Google Scholar] [CrossRef]
- Wang, W.; Rodrigue, H.; Ahn, S.H. Deployable soft composite structures. Sci. Rep. 2016, 6, 20869. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Kim, N.G.; Rodrigue, H.; Ahn, S.H. Modular assembly of soft deployable structures and robots. Mater. Horiz. 2017, 4, 367–376. [Google Scholar] [CrossRef]
- Cortes, P.; Cantwell, W.J.; Kuang, K.S.C.; Quek, S.T. The morphing properties of a smart fiber metal laminate. Polym. Compos. 2008, 29, 1263–1268. [Google Scholar] [CrossRef]
- Feng, N.; Liu, L.W.; Liu, Y.J.; Leng, J.S. Characteristics of multi-functional composites using elastomer embedded with shape memory alloy wire. Mater. Des. 2015, 88, 75–81. [Google Scholar] [CrossRef]
- Pieczyska, E.; Kowalczyk-Gajewska, K.; Maj, M.; Staszczak, M.; Tobushi, H. Thermomechanical Investigation of TiNi Shape Memory Alloy and PU Shape Memory Polymer Subjected to Cyclic Loading. Procedia Eng. 2014, 74, 287–292. [Google Scholar] [CrossRef]
- Tobushi, H.; Hayashi, S.; Hoshio, K.; Makino, Y.; Miwa, N. Bending actuation characteristics of shape memory composite with SMA and SMP. J. Intell. Mater. Syst. Struct. 2006, 17, 1075–1081. [Google Scholar] [CrossRef]
- Tobushi, H.; Pieczyska, E.; Ejiri, Y.; Sakuragi, T. Thermomechanical properties of shape memory alloy and polymer and their composites. Mech. Adv. Mater. Struct. 2009, 16, 236–247. [Google Scholar] [CrossRef]
- Tobushi, H.; Hayashi, S.; Sugimoto, Y.; Date, K. Two-way bending properties of shape memory composite with SMA and SMP. Materials 2009, 2, 1180–1192. [Google Scholar] [CrossRef]
- Lelieveld, C.M.J.L.; Jansen, K.M.B. Thermal-electric characterization and modelling of a smart composite structure for architectural applications. Smart Mater. Struct. 2014, 23, 065010. [Google Scholar] [CrossRef]
- Lelieveld, C.M.J.L.; Jansen, K.M.B.; Teuffel, P. Mechanical characterization of a shape morphing smart composite with embedded shape memory alloys in a shape memory polymer matrix. J. Intell. Mater. Syst. Struct. 2016, 27, 2038–2048. [Google Scholar] [CrossRef]
- Ghosh, P.; Rao, A.; Srinivasa, A.R. Design of multi-state and smart-bias components using shape memory alloy and shape memory polymer composites. Mater. Des. 2013, 44, 164–171. [Google Scholar] [CrossRef]
- Taya, M.; Liang, Y.C.; Namli, O.C.; Tamagawa, H.; Howie, T. Design of two-way reversible bending actuator based on shape memory alloy/shape memory polymer composite. Smart Mater. Struct. 2013, 22, 105003. [Google Scholar] [CrossRef]
- Kang, M.; Pyo, Y.; Jiang, J.Y.; Park, Y.; Son, Y.H.; Choi, M.C.; Ha, J.W.; Chang, Y.W.; Lee, C.S. Design of a shape memory composite (SMC) using 4D printing technology. Sens. Actuators A Phys. 2018, 283, 187–195. [Google Scholar] [CrossRef]
- Wang, W.; Ahn, S.H. Shape memory alloy-based soft gripper with variable stiffness for compliant and effective grasping. Soft Robot. 2017, 4, 379–389. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Yu, C.Y.; Serrano, A.A.; Ahn, S.H. Shape memory alloy-based soft finger with changeable bending length using targeted variable stiffness. Soft Robot. 2020, 7, 283–291. [Google Scholar] [CrossRef] [PubMed]
- Du, H.Y.; Yao, Y.T.; Zhao, Y.J. A space deployable antenna model based on shape memory alloy composite with folding-deploying two-way behavior. Polym. Adv. Technol. 2022, 33, 4214–4222. [Google Scholar] [CrossRef]
- Du, H.Y.; Yao, Y.T.; Zhou, X.L. A facile fabricating method for smart soft robotic hand. Polym. Eng. Sci. 2023, 63, 118–125. [Google Scholar] [CrossRef]
- Zhang, D.W.; Lan, X.; Liu, Y.J.; Leng, J.S. Influence of cross-linking degree on shape memory effect of styrene-based copolymer. Proc. SPIE 2007, 6526, 670–675. [Google Scholar]
- Boyce, M.C.; Arruda, E.M. Constitutive models of rubber elasticity: A review. Rubber Chem. Technol. 2000, 73, 504–523. [Google Scholar] [CrossRef]
- Bechir, H.; Chevalier, L.; Idjeri, M. A three-dimensional network model for rubber elasticity: The effect of local entanglements constraints. Int. J. Eng. Sci. 2010, 48, 265–274. [Google Scholar] [CrossRef]
- Destrade, M.; Dorfmann, L.; Saccomandi, G. The Ogden model of rubber mechanics: 50 years of impact on nonlinear elasticity. Philos. Trans. R. Soc. A 2022, 380, 20210332. [Google Scholar] [CrossRef]
- Du, H.Y.; Liu, L.W.; Zhang, F.H.; Zhao, W.; Leng, J.S.; Liu, Y.J. Thermal-mechanical behavior of styrene-based shape memory polymer tube. Polym. Test. 2017, 57, 119–125. [Google Scholar] [CrossRef]
- Du, H.Y.; Liu, L.W.; Zhang, F.H.; Leng, J.S.; Liu, Y.J. Triple-shape memory effect in a styrene-based shape memory polymer: Characterization, theory and application. Compos. Part B Eng. 2019, 173, 106905. [Google Scholar] [CrossRef]
- Liu, Y.P.; Gall, K.; Dunn, M.L.; Greeberg, A.R.; Diani, J. Thermomechanics of shape memory polymers: Uniaxial experiments and constitutive modeling. Int. J. Plast. 2006, 22, 279–313. [Google Scholar] [CrossRef]
- Guo, X.G.; Liu, L.W.; Liu, Y.J.; Zhou, B.; Leng, J.S. Constitutive model for a stress- and thermal-induced phase transition in a shape memory polymer. Smart Mater. Struct. 2014, 23, 105019. [Google Scholar] [CrossRef]
- Guo, X.G.; Liu, L.W.; Zhou, B.; Liu, Y.J.; Leng, J.S. Constitutive model for shape memory polymer based on the viscoelasticity and phase transition theories. J. Intell. Mater. Syst. Struct. 2016, 27, 314–323. [Google Scholar] [CrossRef]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Du, H.; Yao, Y.; Liu, Y.; Zhao, W. Two-Way Shape Memory Effect of a Shape Memory Composite Strip. Appl. Sci. 2023, 13, 4715. https://doi.org/10.3390/app13084715
Du H, Yao Y, Liu Y, Zhao W. Two-Way Shape Memory Effect of a Shape Memory Composite Strip. Applied Sciences. 2023; 13(8):4715. https://doi.org/10.3390/app13084715
Chicago/Turabian StyleDu, Haiyang, Yongtao Yao, Yang Liu, and Wei Zhao. 2023. "Two-Way Shape Memory Effect of a Shape Memory Composite Strip" Applied Sciences 13, no. 8: 4715. https://doi.org/10.3390/app13084715
APA StyleDu, H., Yao, Y., Liu, Y., & Zhao, W. (2023). Two-Way Shape Memory Effect of a Shape Memory Composite Strip. Applied Sciences, 13(8), 4715. https://doi.org/10.3390/app13084715