

The Improved A* Algorithm for Quadrotor UAVs under Forest Obstacle Avoidance Path Planning

 ,
,
Abstract
1. Introduction
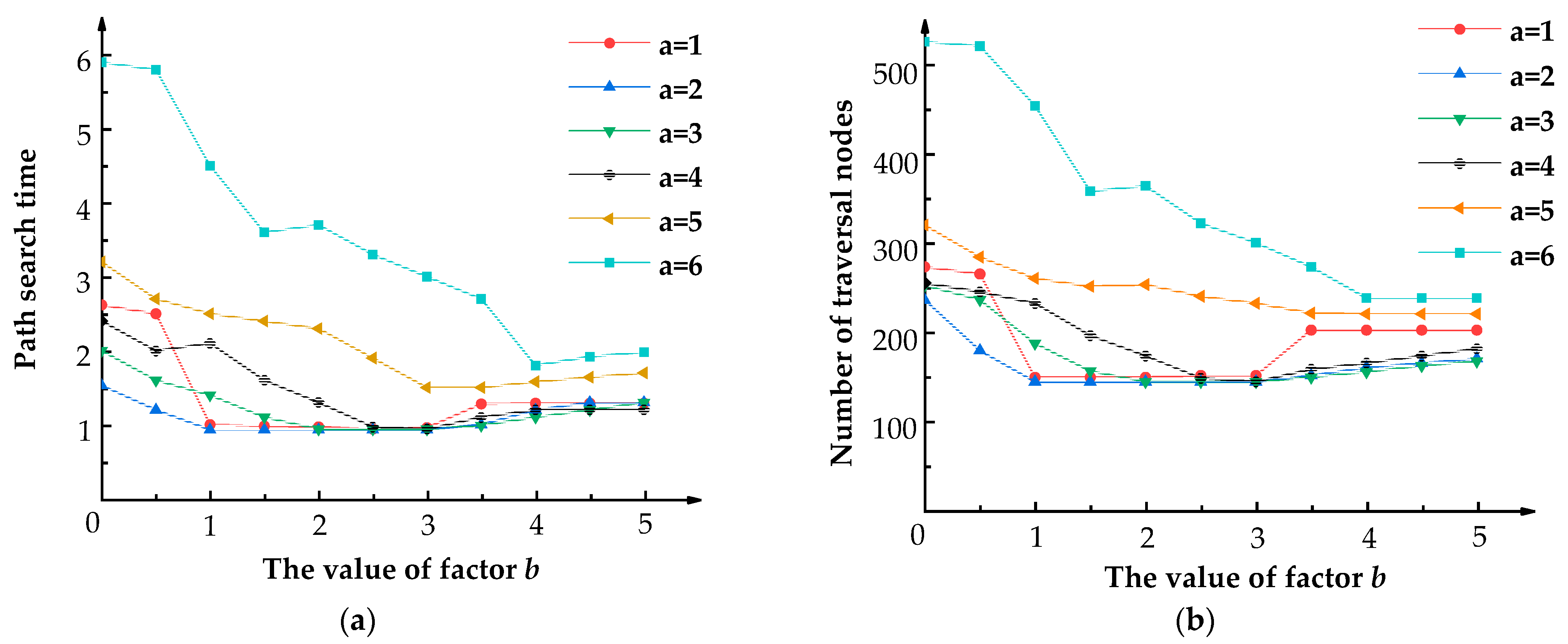
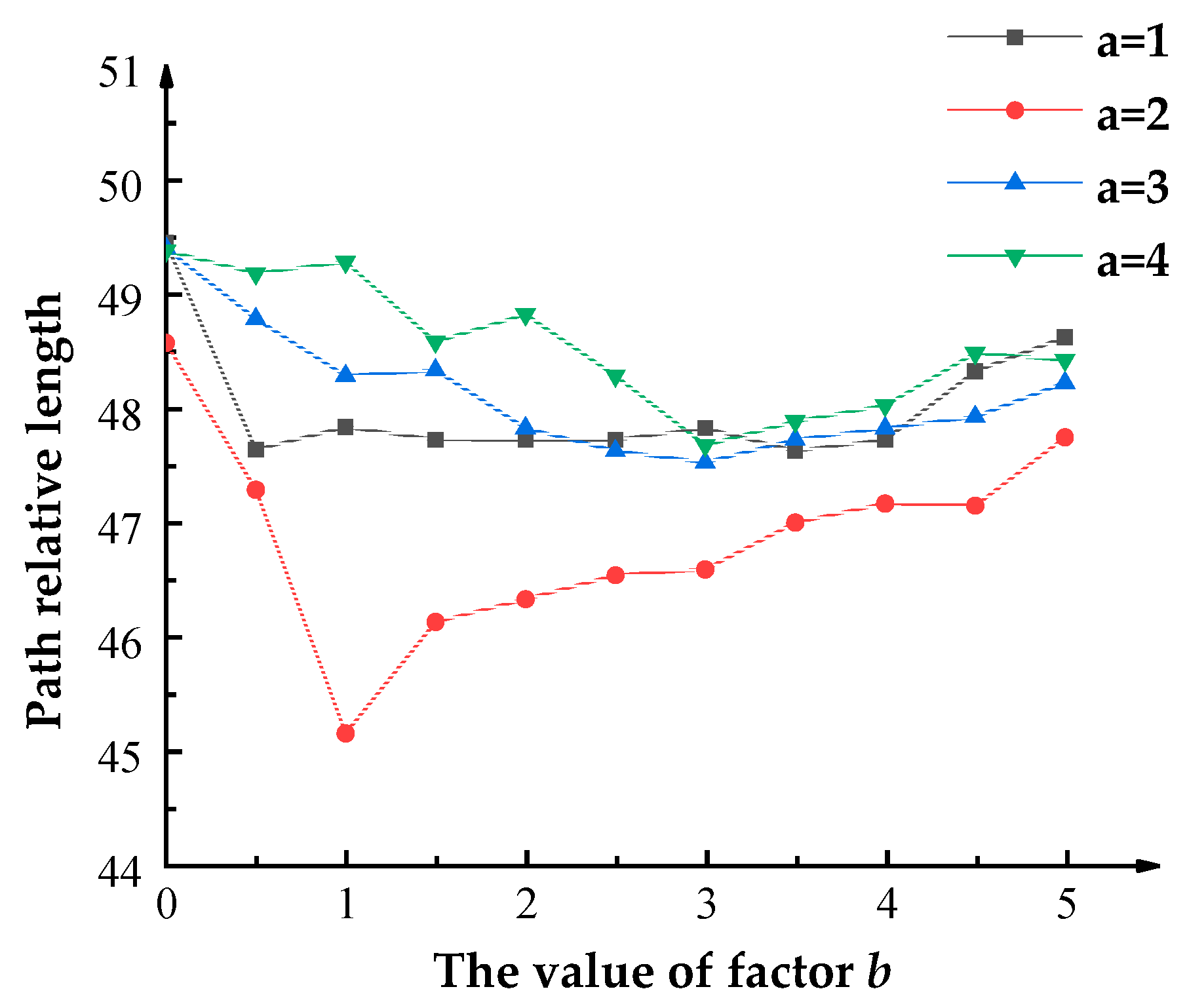
- This paper proposes a segmented cost evaluation function with parameterized weight factors (a and b) assigned to actual cost and heuristic cost in each stage, where the weight factor of the heuristic cost function is adaptively and dynamically adjusted. The optimal parameter combinations under different environmental conditions are obtained to enhance the global search capability for the fast and accurate acquisition of optimal paths.
- The algorithm incorporates turn cost with UAV heading angle constraints into the heuristic function to enhance heuristic search, reducing unnecessary turning points and sharp turns, making the planning path smoother, and guiding the UAV towards the target direction.
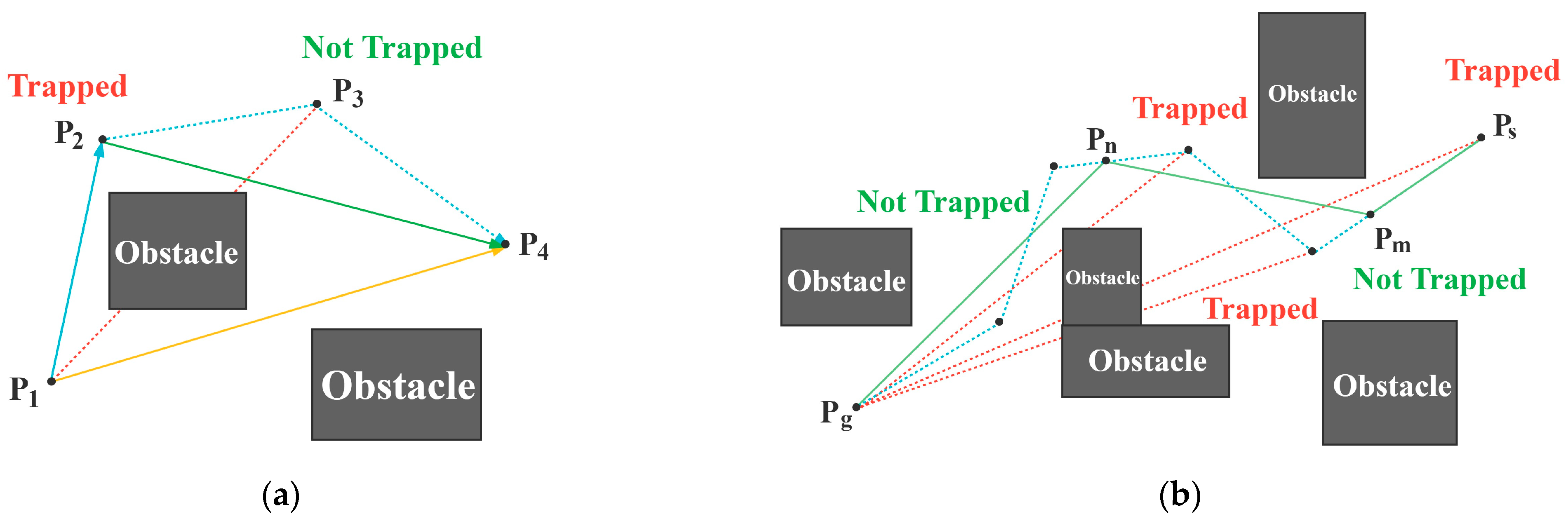
- The paper proposes a strategy for removing redundant turning points by reselecting path nodes on path segments composed of turning points, avoiding the process of turning point removal from falling into local optima while achieving a quadratic programming process on the path, allowing for a more significant reduction of turning points in the shortest path.
2. Materials and Methods
2.1. Traditional A* Algorithm
2.2. Improved A* Algorithm
2.2.1. Segmented Evaluation Function with Dynamic Heuristics and Weighted Processing
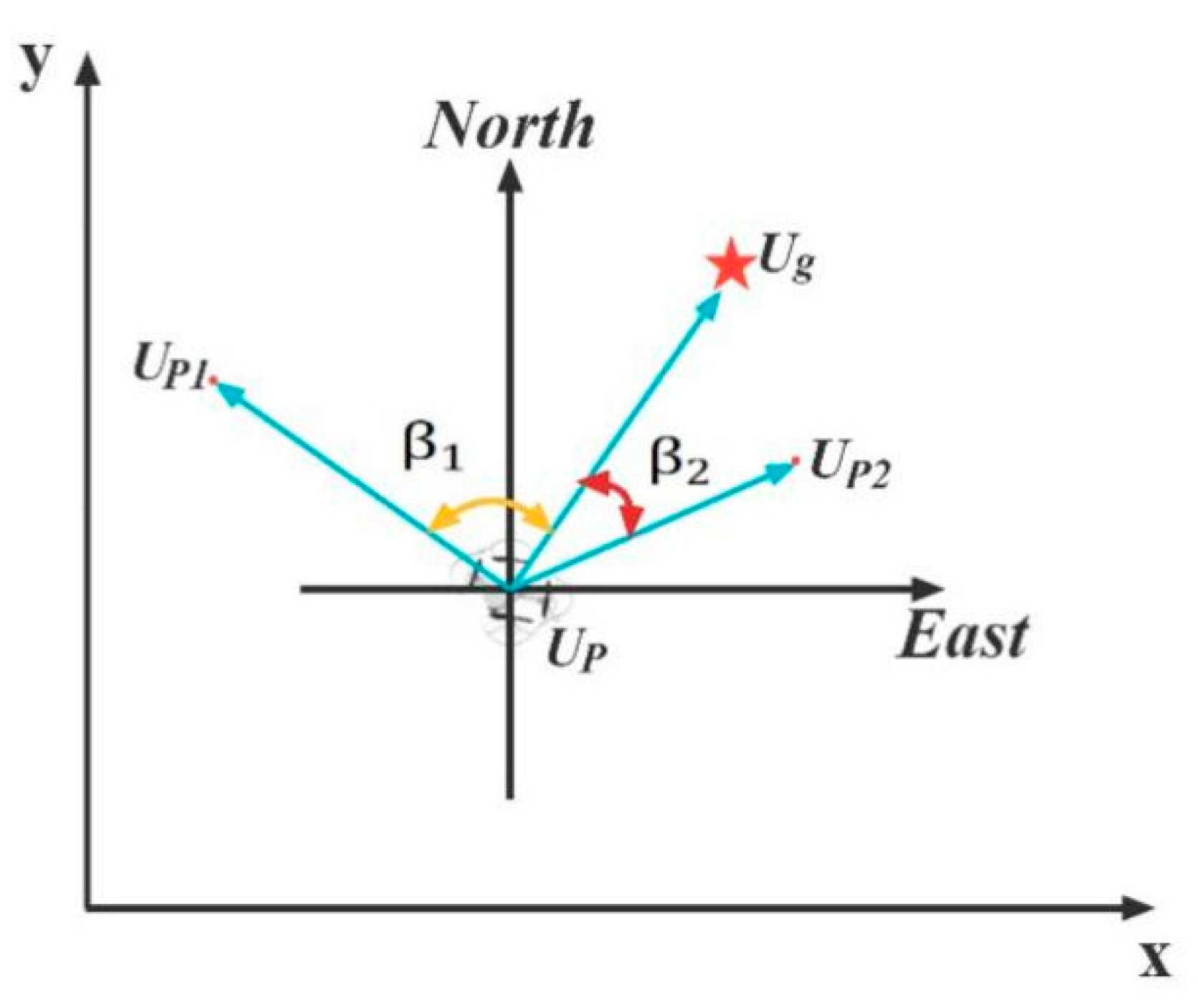
2.2.2. Heuristic Function for Adding Steering Cost
2.2.3. Removing Redundant Turning Points
2.2.4. Smoothing Based on Quasi-Uniform Cubic B-Spline Curves
2.3. Improved A* Algorithm Performance Simulation
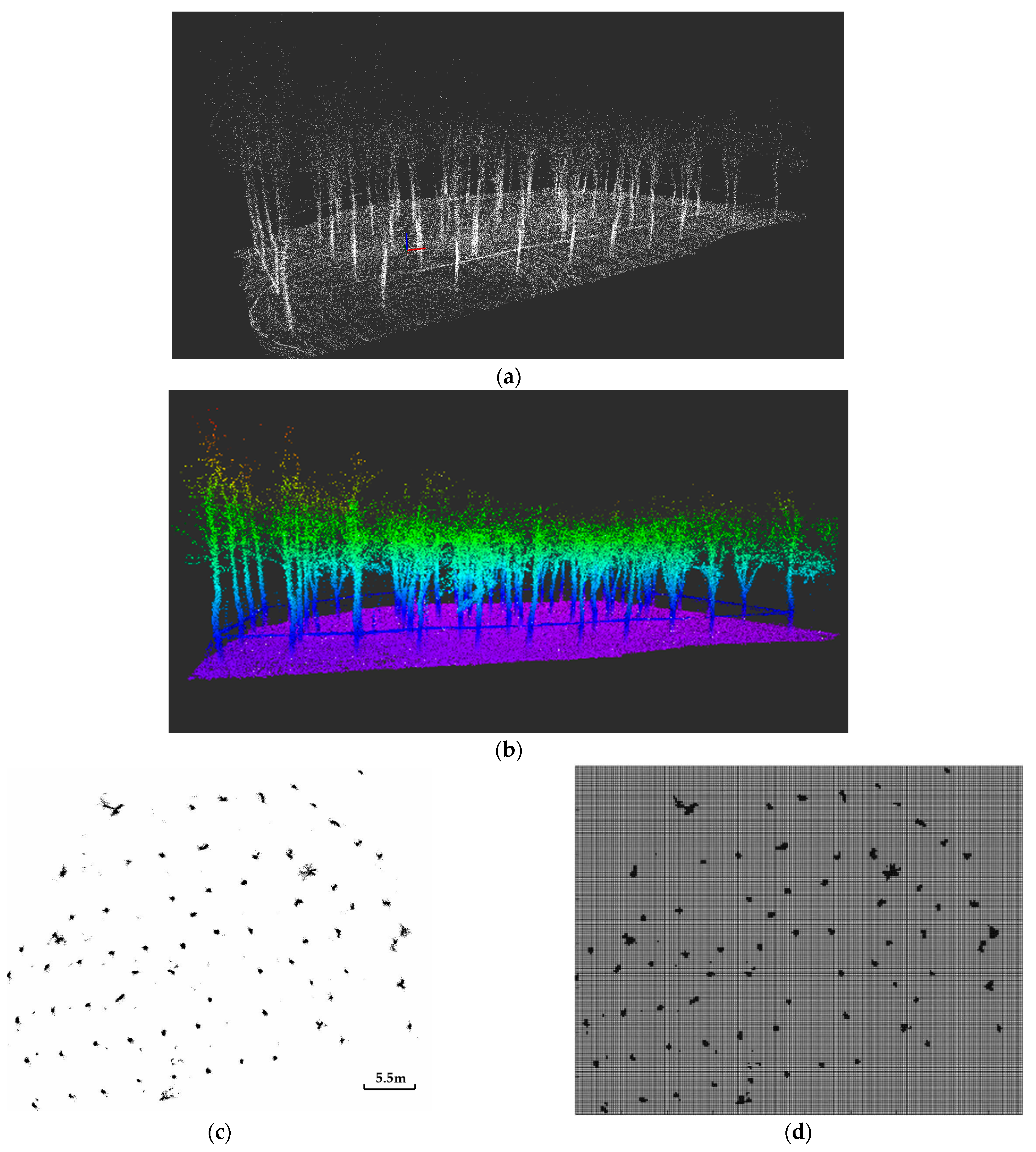
2.4. Comparison Experiments Based on 3D Point Cloud Map of Plantation Forest
3. Results
3.1. Segmented Evaluation Function Parameter Determination Results
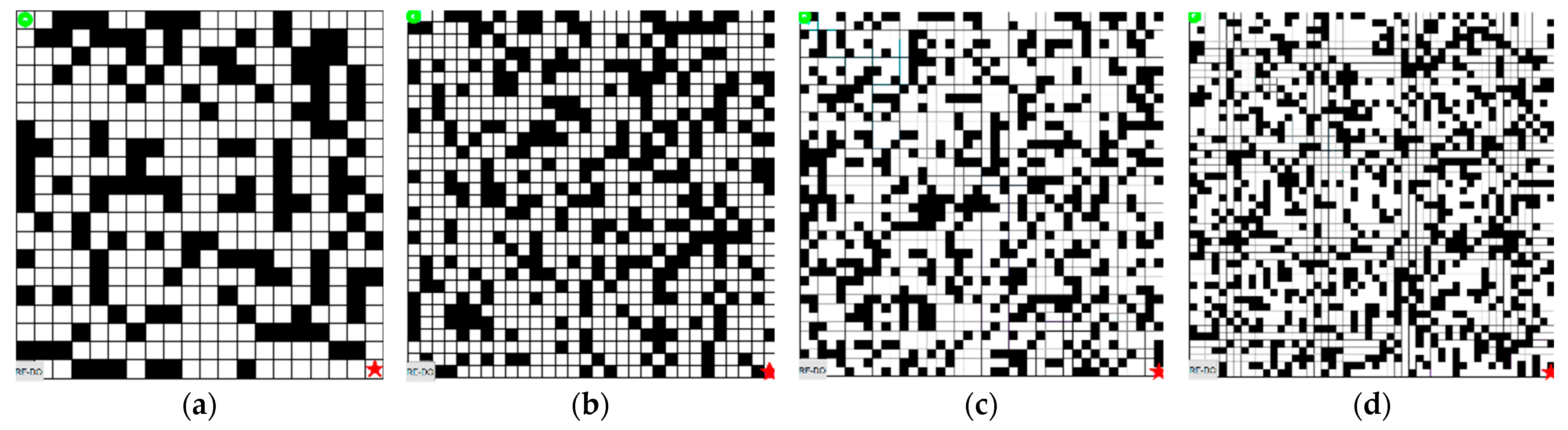
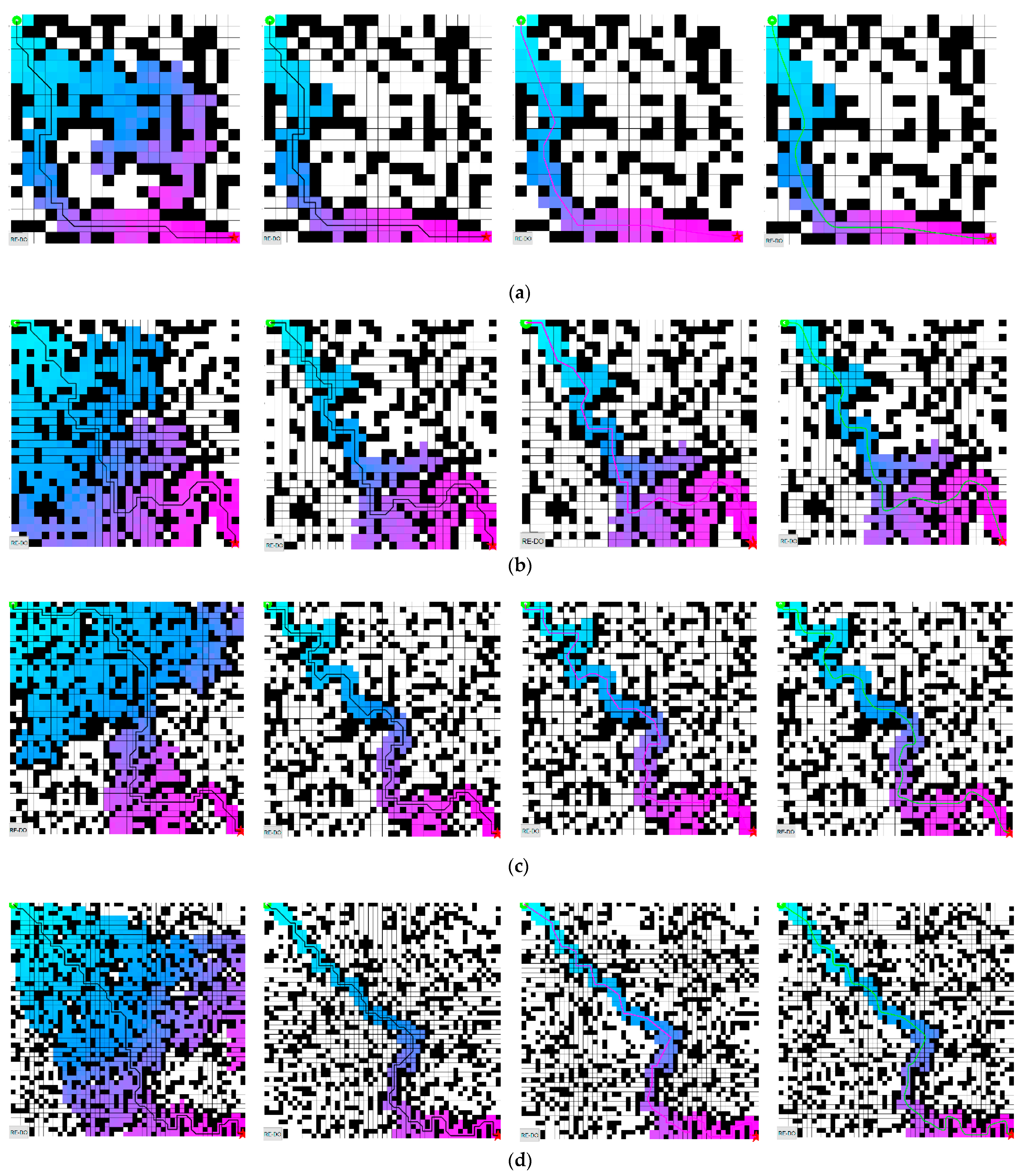
3.2. Performance Simulation Experiment Results
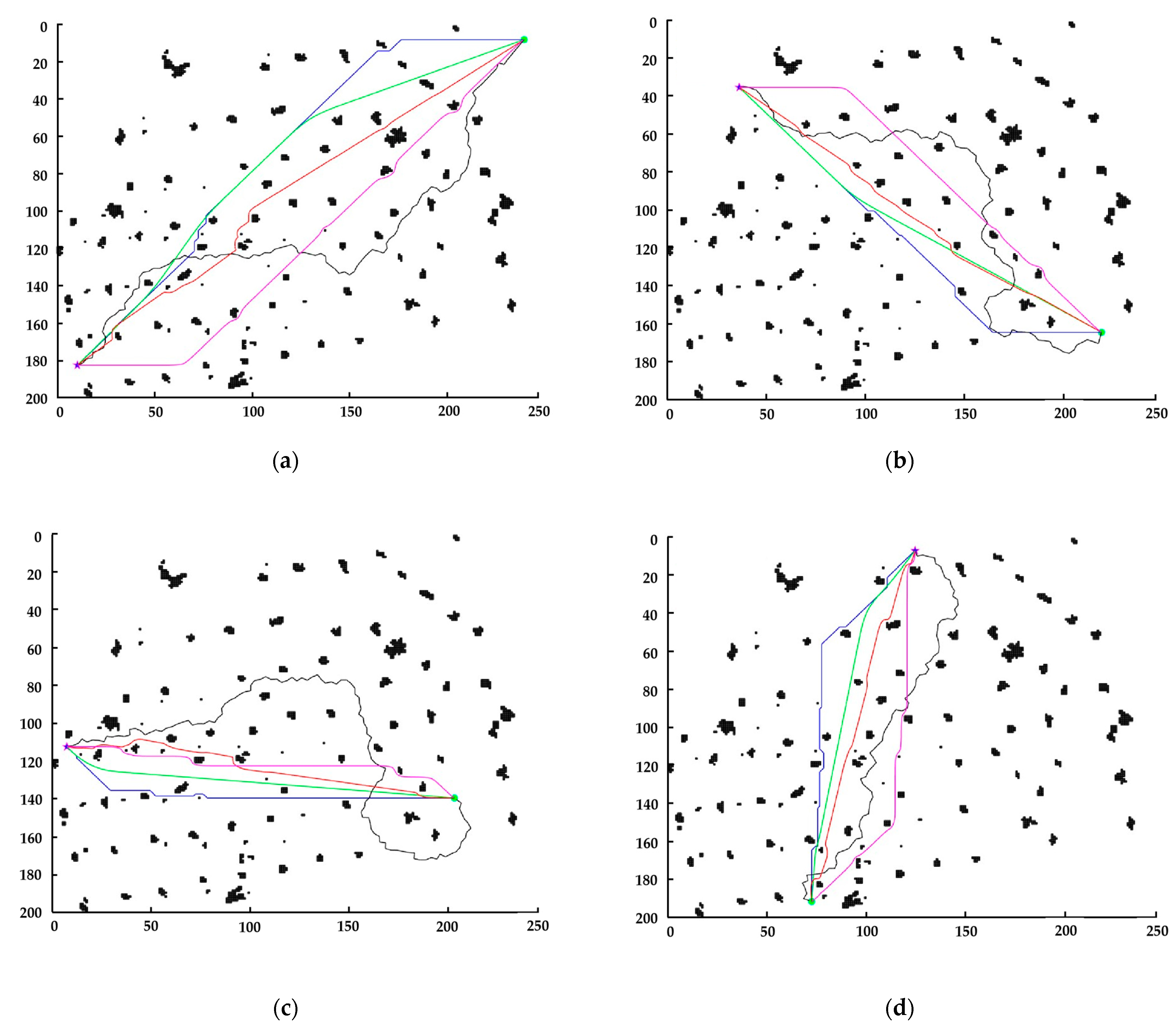
3.3. Comparison Experiments Results Based on 3D Point Cloud Map of Plantation Forest
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, L.; Meng, F. Application analysis of multi-rotor UAV in forest fire prevention and control. For. Sci. Technol. Inf. 2020, 52, 105–107. [Google Scholar]
- Wang, Z.; Zhou, Y.; Li, X.; Wu, Z.; Cen, B.; Zeng, Y. Application analysis of UAV in forest fire prevention. For. Environ. Sci. 2016, 32, 31–35. [Google Scholar]
- Chiaraviglio, L.; D’Andreagiovanni, F.; Liu, W.; Gutierrez, J.; Blefari-Melazzi, N.; Choo, K.K.; Alouini, M.S. Multi-Area Throughput and Energy Optimization of UAV-aided Cellular Networks Powered by Solar Panels and Grid. IEEE Trans. Mob. Comput. 2021, 20, 2427–2444. [Google Scholar] [CrossRef]
- Di Franco, C.; Buttazzo, G. Energy-aware coverage path planning of UAVs. In Proceedings of the International Conference on Autonomous Robot Systems and Competitions, Vila Real, Portugal, 8–10 April 2015; pp. 111–117. [Google Scholar] [CrossRef]
- Ji, X.; Meng, X.; Wang, A.; Hua, Q.; Wang, F.; Chen, R.; Zhang, J.; Fang, D. E2PP: An Energy-Effifcient Path Planning Method for UAV-Assisted Data Collection. Secur. Commun. Netw. 2020, 2020, 8850505:1–8850505:13. [Google Scholar] [CrossRef]
- Kuwata, Y. Real-Time Trajectory Design for Unmanned Aerial Vehicles Using Receding Horizon Control; Institute of Technology: Cambridge, MA, USA, 2003. [Google Scholar]
- Ye, W.; Ma, D.W.; Fan, H.D. Algorithm for low altitude penetration aircraft path planning with improved ant colony algorithm. Chin. J. Aeronaut. 2005, 18, 304–309. [Google Scholar] [CrossRef]
- Chu, X.; Hu, Q.; Zhang, J. Path planning and collision avoidance for a multi-arm space maneuverable robot. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 217–232. [Google Scholar] [CrossRef]
- Xi, F.; Zeng, X.; Ji, S.; Chen, G.; Cai, C. Path planning of mobile robot based on Improved-RRT algorithm. Comput. Sci. 2019, 46, 247–253. [Google Scholar] [CrossRef]
- LaValle, S.; Kuffner, J. Rapidly-exploring random trees: Progress and prospects. Algorithmic Comput. Robot. New Dir. 2001, 5, 293–308. [Google Scholar] [CrossRef]
- LaValle, S.; Kuffner, J. RRT-connect: An efficient approach to single-query path planning. In Proceedings of the 2000 ICRA. Millennium Conference, San Francisco, CA, USA, 24–28 April 2000; IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No. 00CH37065). pp. 995–1001. [Google Scholar] [CrossRef]
- Jeong, I.; Lee, S.; Kim, J. Quick-RRT*: Triangular inequality-based implementation of RRT* with improved initial solution and convergence rate. Expert Syst. Appl. 2019, 123, 82–90. [Google Scholar] [CrossRef]
- Gammell, J.; Srinivasa, S.; Barfoot, T. Informed RRT*: Optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, IL, USA, 14–18 September 2014. [Google Scholar] [CrossRef]
- Gammell, J.; Srinivasa, S.; Barfoot, T. Batch informed trees (BIT*): Sampling-based optimal planning via the heuristically guided search of implicit random geometric graphs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015. [Google Scholar] [CrossRef]
- Yang, F.; Fang, X.; Gao, F.; Zhou, X.; Li, H.; Jin, H.; Song, Y. Obstacle Avoidance Path Planning for UAV Based on Improved RRT Algorithm. Discret. Dyn. Nat. Soc. 2022, 2022, 4544499. [Google Scholar] [CrossRef]
- Li, B.; Qi, X.; Yu, B.; Liu, L. Trajectory Planning for UAV Based on Improved ACO Algorithm. IEEE Access 2020, 8, 2995–3006. [Google Scholar] [CrossRef]
- Zhou, Y.; Su, Y.; Xie, A.; Kong, L. A newly bio-inspired path planning algorithm for autonomous obstacle avoidance of UAV. Chin. J. Aeronaut. 2021, 34, 199–209. [Google Scholar] [CrossRef]
- Zhang, J.; Chadha, R.G.; Velivela, V.; Singh, S. P-CAP: Precomputed alternative paths to enable aggressive aerial maneuvers in cluttered environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, Spain, 1–5 October 2018. [Google Scholar] [CrossRef]
- Zhang, J.; Chadha, R.G.; Velivela, V.; Singh, S. P-CAL: Pre-computed alternative lanes for aggressive aerial collision avoidance. In Proceedings of the 12th International Conference on Field and Service Robotics (FSR), Tokyo, Japan, 29–31 August 2019. [Google Scholar]
- Zhang, J.; Hu, C.; Chadha, R.G.; Singh, S. Maximum Likelihood Path Planning for Fast Aerial Maneuvers and Collision Avoidance. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macao, China, 3–8 November 2019; pp. 2805–2812. [Google Scholar] [CrossRef]
- Fan, C.; Chen, W.; Xi, Y. Hopfield neural networks for path planning in dynamic and unknown environments. Control Theory Appl. 2004, 21, 345–350. [Google Scholar]
- Gao, M.; Wei, P.; Liu, Y. Competitive Self-Organizing Neural Network Based UAV Path Planning. In Proceedings of the IEEE 6th International Conference on Computer and Communications (ICCC), Chengdu, China, 11–14 December 2020; pp. 2376–2381. [Google Scholar] [CrossRef]
- Wei, B.; Yang, R.; Shu, S.; Wan, Y.; Miao, J. Path planning of mobile robots based on ion motion-artificial bee colony algorithm. J. Comput. Appl. 2021, 41, 379–383. [Google Scholar]
- Pan, Y.; Yang, Y.; Li, W. A Deep Learning Trained by Genetic Algorithm to Improve the Efficiency of Path Planning for Data Collection with Multi-UAV. IEEE Access 2021, 9, 7994–8005. [Google Scholar] [CrossRef]
- Das, M.; Roy, A.; Maity, S.; Kar, S.; Sengupta, S. Solving fuzzy dynamic ship routing and scheduling problem through new genetic algorithm. Decis. Mak. Appl. Manag. Eng. 2022, 5, 329–361. [Google Scholar] [CrossRef]
- Chen, X.; Chen, J.; Du, C.; Xu, Y. Region Coverage Path Planning of Multiple Disconnected Convex Polygons Based on Simulated Annealing Algorithm. In Proceedings of the IEEE 4th International Conference on Computer and Communication Engineering Technology (CCET), Beijing, China, 13–15 August 2021; pp. 238–242. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, S.; Wu, F.; Wang, Y. Path Planning of UAV Based on Improved Adaptive Grey Wolf Optimization Algorithm. IEEE Access 2021, 9, 89400–89411. [Google Scholar] [CrossRef]
- Negi, G.; Kumar, A.; Pant, S.; Ram, M. Optimization of Complex System Reliability using Hybrid Grey Wolf Optimizer. Decis. Mak. Appl. Manag. Eng. 2021, 4, 241–256. [Google Scholar] [CrossRef]
- Ganguly, S. Multi-objective distributed generation penetration planning with load model using particle swarm optimization. Decis. Mak. Appl. Manag. Eng. 2020, 3, 30–42. [Google Scholar] [CrossRef]
- Dijkstra, E. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef]
- Kovacs, B.; Szayer, G.; Tajti, F.; Burdelis, M.; Korondi, P. A novel potential field method for path planning of mobile robots by adapting animal motion attributes. Robot. Auton. Syst. 2016, 82, 24–34. [Google Scholar] [CrossRef]
- Orozco-Rosas, U.; Montiel, O.; Sepulveda, R. Mobile robot path planning using membrane evolutionary artificial potential field. Appl. Soft Comput. 2019, 77, 236–251. [Google Scholar] [CrossRef]
- Huang, Z.; Chu, D.; Wu, C.; He, Y. Path planning and cooperative control for automated vehicle platoon using hybrid automata. IEEE Trans. Intell. Transp. Syst. 2019, 20, 959–974. [Google Scholar] [CrossRef]
- Liu, J.; Xu, C.; Wu, Z.; Chen, Y. Intelligent rebar layout in rc building frames using artificial potential field. Autom. Constr. 2020, 114, 103172. [Google Scholar] [CrossRef]
- Huang, L.; Zhou, F. Path planning of moving robot based on path optimization of D*Lite algorithm. Control Decis. 2020, 35, 877–884. [Google Scholar] [CrossRef]
- Hart, P.; Nilsson, N.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1972, 4, 28–29. [Google Scholar] [CrossRef]
- Ju, C.; Luo, Q.; Yan, X. Path Planning Using an Improved A-star Algorithm. In Proceedings of the 11th International Conference on Prognostics and System Health Management (PHM), Jinan, China, 23–25 October 2020; pp. 23–26. [Google Scholar] [CrossRef]
- Cao, R.; Zhang, Z.; Li, S.; Zhang, M.; Li, H.; Li, M. Multi-machine Cooperation Global Path Planning Based on A-star Algorithm and Bezier Curve. Trans. Chin. Soc. Agric. Mach. 2021, 52, 548–554. [Google Scholar] [CrossRef]
- Gochev, K.; Safonova, A.; Likhachev, M. Anytime tree-restoring weighted A* graph search. In Proceedings of the Seventh Annual Symposium on Combinatorial Search, Prague, Czech Republic, 15–17 August 2014; pp. 80–88. [Google Scholar]
- Huang, X.; Dong, X.; Ma, J.; Liu, K.; Ahmed, S.; Lin, J.; Qiu, B. The Improved A* Obstacle Avoidance Algorithm for the Plant Protection UAV with Millimeter Wave Radar and Monocular Camera Data Fusion. Remote Sens. 2021, 13, 3364. [Google Scholar] [CrossRef]
- Xin, Y.; Liang, H.; Du, M. An improved A* algorithm for searching infinite neighborhoods. Robot 2014, 36, 627–633. [Google Scholar] [CrossRef]
- Chen, J.; Cui, Y.; Liu, X. Path planning method of mobile robot based on improved A* algorithm. Appl. Res. Comput. 2020, 37, 118–119. [Google Scholar]
- Kong, J.; Zhang, P.; Liu, X. Research on Improved A* Algorithm of Bidirectional Search Mechanism. Comput. Eng. Appl. 2021, 57, 231–237. [Google Scholar] [CrossRef]
- Lin, M.; Yuan, K.; Shi, C.; Wang, Y. Path planning of mobile robot based on improved A∗ algorithm. In Proceedings of the 29th Chinese Control and Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 3570–3576. [Google Scholar] [CrossRef]
- Islam, F.; Narayanan, V.; Likhachev, M. Dynamic multi-heuristic A*. In Proceedings of the IEEE International Conference on Robotics and Automation, Seattle, WA, USA, 26–30 May 2015; pp. 2376–2382, 2152–4092. [Google Scholar] [CrossRef]
- Fu, B.; Chen, L.; Zhou, Y. An improved A* algorithm for the industrial robot path planning with high success rate and short length. Robot. Auton. Syst. 2018, 106, 26–37. [Google Scholar] [CrossRef]
- Zhou, B.; Gao, F.; Wang, L.; Liu, C.; Shen, S. Robust and efficient quadrotor trajectory generation for fast autonomous flight. IEEE Robot. Autom. Lett. 2019, 4, 3529–3536. [Google Scholar] [CrossRef]
- Wu, X.; Xu, L.; Zhen, R.; Wu, X. Bi-Directional Adaptive A* Algorithm Toward Optimal Path Planning for Large-Scale UAV Under Multi-Constraints. IEEE Access 2020, 8, 85431–85440. [Google Scholar] [CrossRef]
- Muñoz, J.; Li, B.; Rong, X.; Xiao, J.; Tian, Y.; Arditi, A. An assistive indoor navigation system for the visually impaired in multi-floor environments. In Proceedings of the IEEE 7th Annual International Conference on CYBER Technology in Automation, Control, and Intelligent Systems (CYBER), Honolulu, HI, USA, 31 July–4 August 2017; pp. 7–12. [Google Scholar] [CrossRef]
- Liu, Z.; Liu, H.; Lu, Z. A dynamic fusion pathfinding algorithm using delaunay triangulation and improved A-star for mobile robots. IEEE Access 2021, 9, 20602–20621. [Google Scholar] [CrossRef]
- Zhou, S.; Kang, F.; Li, W.; Kan, J.; Zheng, Y.; He, G. Extracting Diameter at Breast Height with a Handheld Mobile LiDAR System in an Outdoor Environment. Sensors 2019, 19, 3212. [Google Scholar] [CrossRef]
- Shen, K.; You, Z.; Liu, Y.; Huang, T. Mobile robot planning based on improved a* algorithm. Appl. Res. Comput. 2022, 41, 75–79. [Google Scholar] [CrossRef]
- Wang, H.; Liu, Y. A low-cost autonomous navigation system for a quadrotor in complex outdoor environments. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420905150. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter b | Path Search Time(s) | Number of Nodes Traversed |
|---|---|---|
| 1 | 0.714 | 144 |
| 1.5 | 0.709 | 144 |
| 2 | 0.713 | 142 |
| 2.5 | 0.732 | 141 |
| 3 | 0.775 | 141 |
| Environment | Optimization Steps and Methods | Data Processing Time (s) | Number of Nodes Traversed | Number of Turning Points | Path Length | Total Turning Angle |
|---|---|---|---|---|---|---|
| Traditional A* | 1.52 | 161 | 14 | 36.49 | 810° | |
| 20 × 20 | Optimization 1 | 0.49 | 75 | 14 | 36.49 | 810° |
| Grid | Optimization 1 + 2 | 0.53 | 75 | 8 | 31.62 | 190.50° |
| Optimization 1 + 2 + 3 | 0.54 | 75 | 0 | 30.58 | 187.84° | |
| Traditional A* | 3.20 | 456 | 35 | 62.38 | 2070° | |
| 30 × 30 | Optimization 1 | 1.06 | 195 | 35 | 62.38 | 2070° |
| Grid | Optimization 1 + 2 | 1.42 | 195 | 20 | 55.55 | 975.95° |
| Optimization 1 + 2 + 3 | 1.43 | 195 | 0 | 54.01 | 895.78° | |
| Traditional A* | 4.77 | 719 | 33 | 84.38 | 2250° | |
| 40 × 40 | Optimization 1 | 1.01 | 218 | 44 | 86.48 | 2870° |
| Grid | Optimization 1 + 2 | 2.97 | 218 | 29 | 79.18 | 1475.90° |
| Optimization 1 + 2 + 3 | 2.99 | 218 | 0 | 75.13 | 1424.28° | |
| Traditional A* | 7.77 | 1166 | 48 | 100.70 | 2925° | |
| 50 × 50 | Optimization 1 | 1.43 | 243 | 50 | 102.18 | 2925° |
| Grid | Optimization 1 + 2 | 4.53 | 243 | 33 | 97.25 | 1755.03° |
| Optimization 1 + 2 + 3 | 4.55 | 243 | 0 | 91.14 | 1525.22° |
| Environment | Algorithm | Path Search Time (s) | Path Length | Total Turning Angle |
|---|---|---|---|---|
| 1 | Traditional A* | 4.36 | 312.10 | 495.00° |
| RRT | 47.92 | 370.82 | 3816.09° | |
| APF | 78.64 | 299.26 | 1025.95° | |
| A* in reference [39] | 4.09 | 304.32 | 482.46° | |
| Improved A* | 3.49 | 294.50 | 44.61° | |
| 2 | Traditional A* | 2.24 | 239.36 | 315.00° |
| RRT | 52.20 | 339 | 3636.93° | |
| APF | 56.19 | 228.88 | 397.07° | |
| A* in reference [39] | 1.98 | 237.43 | 157.93° | |
| Improved A* | 1.35 | 225.64 | 15.40° | |
| 3 | Traditional A* | 0.48 | 210.60 | 405.00° |
| RRT | 35.80 | 360.00 | 4571.42° | |
| APF | 47.89 | 204.23 | 635.60° | |
| A* in reference [39] | 0.42 | 206.32 | 508.93° | |
| Improved A* | 0.31 | 200.53 | 41.85° | |
| 4 | Traditional A* | 3.23 | 211.54 | 765° |
| RRT | 24.92 | 258.00 | 3181.67° | |
| APF | 46.60 | 197.87 | 601.88° | |
| A* in reference [39] | 2.21 | 204.99 | 589.46° | |
| Improved A* | 1.97 | 194.95 | 54.13° |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, J.; Kang, F.; Chen, C.; Tong, S.; Jia, Y.; Zhang, C.; Wang, Y. The Improved A* Algorithm for Quadrotor UAVs under Forest Obstacle Avoidance Path Planning. Appl. Sci. 2023, 13, 4290. https://doi.org/10.3390/app13074290
Li J, Kang F, Chen C, Tong S, Jia Y, Zhang C, Wang Y. The Improved A* Algorithm for Quadrotor UAVs under Forest Obstacle Avoidance Path Planning. Applied Sciences. 2023; 13(7):4290. https://doi.org/10.3390/app13074290
Chicago/Turabian StyleLi, Jiale, Feng Kang, Chongchong Chen, Siyuan Tong, Yalan Jia, Chenxi Zhang, and Yaxiong Wang. 2023. "The Improved A* Algorithm for Quadrotor UAVs under Forest Obstacle Avoidance Path Planning" Applied Sciences 13, no. 7: 4290. https://doi.org/10.3390/app13074290
APA StyleLi, J., Kang, F., Chen, C., Tong, S., Jia, Y., Zhang, C., & Wang, Y. (2023). The Improved A* Algorithm for Quadrotor UAVs under Forest Obstacle Avoidance Path Planning. Applied Sciences, 13(7), 4290. https://doi.org/10.3390/app13074290