

Scaling-Up Social Learning in Small Groups with Robot Supported Collaborative Learning (RSCL): Effects of Learners’ Prior Experience in the Case Study of Planning Poker with the Robot NAO


Abstract
1. Introduction
1.1. Background
1.2. Rationale and Research Questions
1.3. Planning Poker
1.4. Related Work
1.5. Contribution
- A game-based, robot-supported application “Planning poker with NAO” for collaborative learning of agile estimation in small groups, using a combined macro and micro script [24] based on the model of self-regulated learning by Zimmerman [25], which can be used to enable a scalable in-person, robot-supported collaborative learning experience for a larger number of small groups;
- A shortened 20-item scale with high internal consistency, which can be used for the evaluation of the quality of social learning experiences supported by social robots;
- Quantitative and qualitative results from the evaluation with 46 adult participants showing that planning poker with the robot NAO as a robot-supported collaborative learning activity in a team can provide university students with an enjoyable and, at the same time, effective social learning experience that supports understanding and learning through play in a team.
- Comparison of the learning experience during a robot-supported collaborative learning activity of students with and without prior experience in interacting with a robot.
2. Materials and Methods
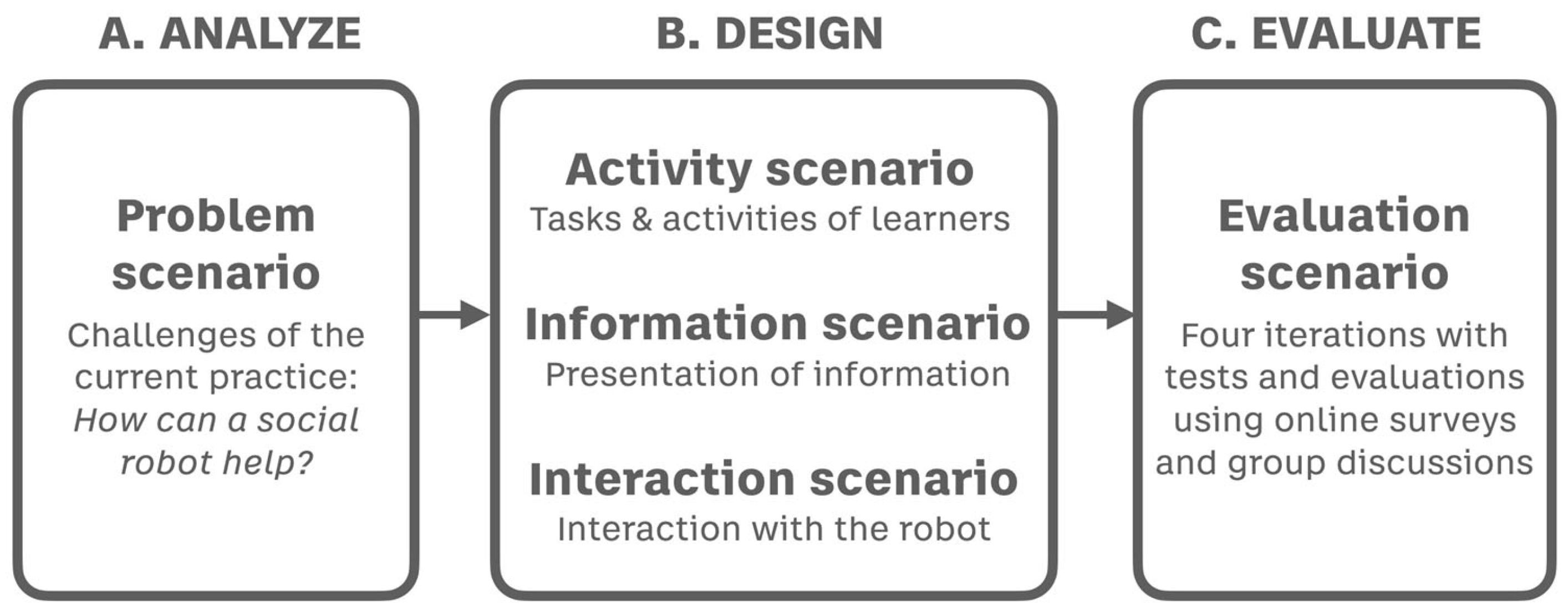
2.1. Scenario-Based Design
2.1.1. Analysis
2.1.2. Design
2.1.3. Evaluation
- The first iteration focused on creating a first prototype based on the draft of the problem scenario from the analysis stage, which was derived from hands-on experiences without the possibility to rely on any prior research in the application of a robotic facilitator of planning poker. In order to evaluate the first prototype, a pretest with a small group of three students was conducted to obtain early feedback related to the overall design of the game and the specific aspects such as the robot’s speech quality and the comprehensiveness of the explanation. The evaluation used a Likert-scale-based grading system for different rating criteria, such as comprehensibility of language and information and the robot’s speech quality. Based on the results from this first pretest, the prototype was iterated further.
- The second iteration focused on improving the speech quality, the explanation of the planning poker, and the explanation of interaction during agile estimation in the small group. The speaking rate of the robot was decreased and some ambiguities in the explanations were addressed. The information part was better tuned in to students without prior experience in planning poker and agile estimation. The improved version was tested with 15 undergraduate students.
- The third iteration was based on the evaluation results from the previous test and incorporated a number of changes, such as (i) an improved dialog design with more questions and presentation of information in smaller chunks; (ii) further improvement of the explanation by shortening the texts spoken by the robot; (iii) reducing the number of tasks to be estimated from eight to six; (iv) reformulating the tasks to be estimated by adding more information about each task; and (v) introducing more variation in the responses of the robot to make the interaction less predictable and more exciting. The new version was tested with 14 graduate students. Following SBD by [24], the improved design elaborated in more detail how students will perform estimation in teams and how the robot will support group collaboration.
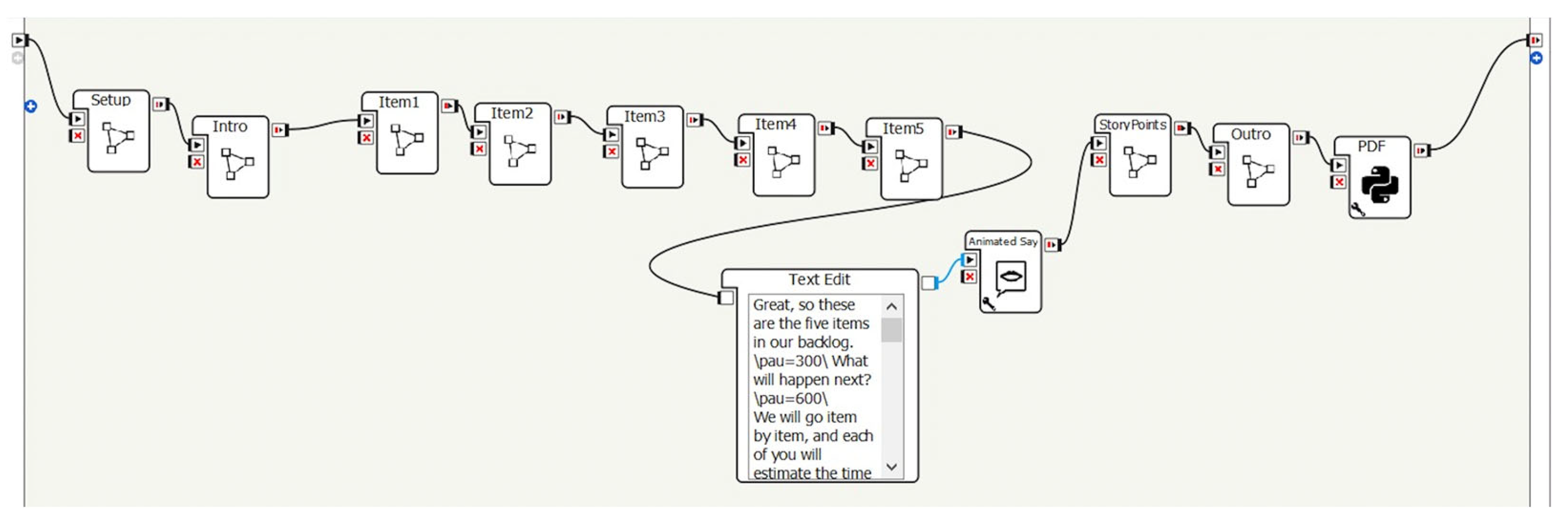
- The fourth iteration resulted in the final version of the game “Planning poker with NAO”, which was applied in the study presented in this paper. The narrative script was transformed into the robot application using the Choregraphe software for NAO (Version 2.8.6) and additional Python code for the creation of a PDF document with the results of each estimation.
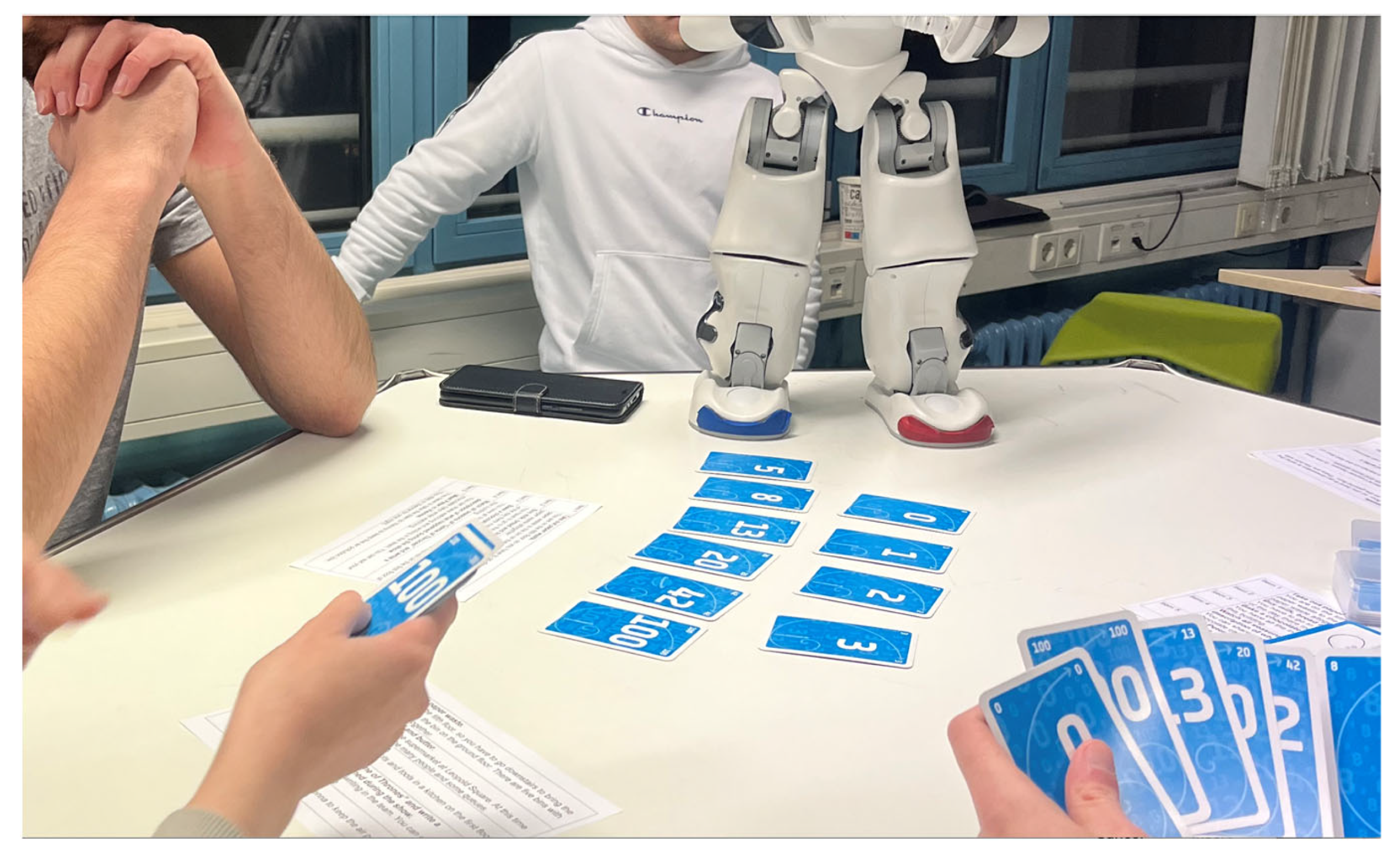
2.2. Planning Poker with NAO
2.3. Study Settings
2.4. Study Participants
2.5. Materials
2.6. Procedure
2.7. Research Questions
- RQ1: What was the quality of the social learning experience in a group of students playing planning poker?
- RQ2: What was the quality of the interaction with the robot NAO during planning poker?
- RQ3: To what extent did the previous experience with the NAO robot influence the quality of the robot-supported collaborative learning experience?
2.8. Research Instruments
2.8.1. Shortened Learning Experience Scale
2.8.2. Interaction Experience with NAO
3. Results
3.1. RQ1: What Was the Quality of the Social Learning Experience in a Group of Students Playing Planning Poker?
3.2. RQ2: What Was the Quality of the Interaction with the Social Robot NAO during the Game of Planning Poker?
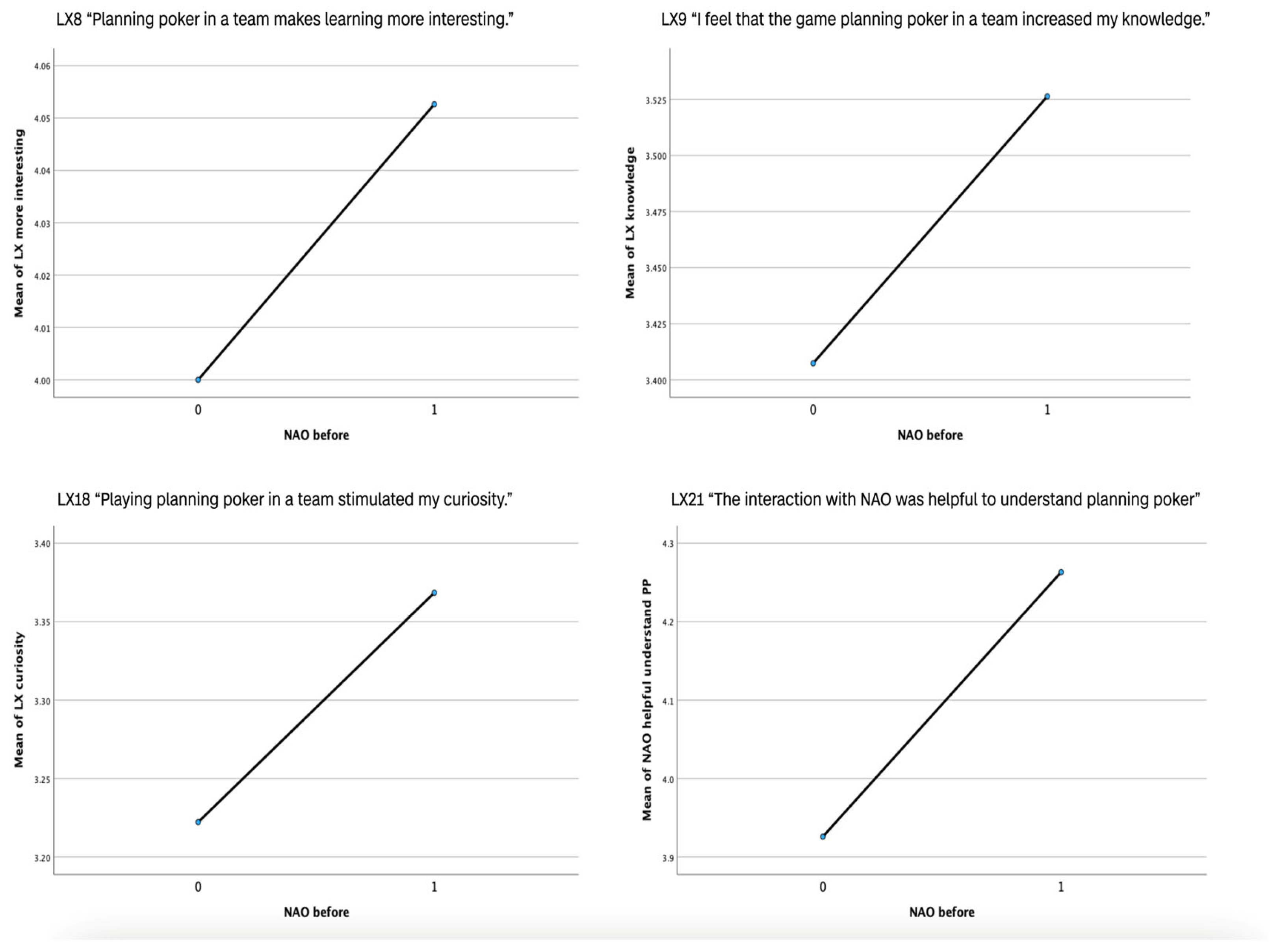
3.3. RQ3: To What Extent Did the Previous Experience with the NAO Robot Influence the Quality of the Robot-Supported Collaborative Experience?
4. Discussion
4.1. Summary
4.2. Limitations and Future Research
Supplementary Materials
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Orr, D.; Weller, M.; Farrow, R. Models for Online, Open, Flexible and Technology Enhanced Higher Education Across the Globe—A Comparative Analysis; International Council for Open and Distance Education, Open University: Milton Keynes, UK, 2018. [Google Scholar]
- Bashir, A.; Bashir, S.; Rana, K.; Lambert, P.; Vernallis, A.B. Post-COVID-19 Adaptations; the Shifts Towards Online Learning, Hybrid Course Delivery and the Implications for Biosciences Courses in the Higher Education Setting. Front. Educ. 2021, 6, 711619. [Google Scholar] [CrossRef]
- Akter, R.; Barua, D.; Akber, S.M. Adoption of On-Campus Learning in Post-COVID-19 Pandemic: An Empirical Study on Private University Students of Bangladesh. Am. J. Educ. Res. 2022, 10, 592–598. [Google Scholar] [CrossRef]
- Deshmukh, J. Speculations on the post-pandemic university campus—A global inquiry. Archnet-IJAR Int. J. Archit. Res. 2021, 15, 131–147. [Google Scholar] [CrossRef]
- Rapanta, C.; Botturi, L.; Goodyear, P.; Guàrdia, L.; Koole, M. Balancing Technology, Pedagogy and the New Normal: Post-pandemic Challenges for Higher Education. Postdigit. Sci. Educ. 2021, 3, 715–742. [Google Scholar] [CrossRef]
- Franco, L.A.; Nielsen, M.F. Examining group facilitation in situ: The use of formulations in facilitation practice. Group Decis. Negot. 2018, 27, 735–756. [Google Scholar] [CrossRef]
- Kokotsaki, D.; Menzies, V.; Wiggins, A. Project-based learning: A review of the literature. Improv. Sch. 2016, 19, 267–277. [Google Scholar] [CrossRef]
- Rosenberg-Kima, R.B.; Koren, Y.; Gordon, G. Robot-Supported Collaborative Learning (RSCL): Social Robots as Teaching Assistants for Higher Education Small Group Facilitation. Front. Rob. AI 2020, 6, 148. [Google Scholar] [CrossRef] [PubMed]
- OECD. OECD Digital Education Outlook 2021: Pushing the Frontiers with Artificial Intelligence, Blockchain and Robots; OECD Publishing: Paris, France, 2021. [Google Scholar] [CrossRef]
- Sudarmaningtyas, P.; Mohamed, R.B. Extended Planning Poker: A Proposed Model. In Proceedings of the 7th International Conference on Information Technology, Computer, and Electrical Engineering (ICITACEE), Semarang, Indonesia, 24–25 September 2020; pp. 179–184. [Google Scholar] [CrossRef]
- Usman, M.; Mendes, E.; Neiva, F.W.; Britto, R. Effort estimation in agile software development: A systematic literature review. In Proceedings of the 10th International Conference on Predictive Models in Software Engineering, Turin, Italy, 17 September 2014; pp. 82–91. [Google Scholar] [CrossRef]
- Mahnic, V.; Hovelja, T. On using planning poker for estimating user stories. J. Sys. Soft. 2012, 85, 2086–2095. [Google Scholar] [CrossRef]
- Digital.ai: 15th State of Agile Report. 2021. Available online: https://info.digital.ai/rs/981-LQX-968/images/SOA15.pdf (accessed on 27 February 2023).
- Roschelle, J.; Teasley, S.D. The construction of shared knowledge in collaborative problem solving. In Computer-Supported Collaborative Learning; O’Malley, C.E., Ed.; Springer-Verlag: Berlin, Germany, 2012; pp. 69–197. [Google Scholar]
- Dillenbourg, P. What do you mean by collaborative learning? In Collaborative-Learning: Cognitive and Computational Approaches; Elsevier: Oxford, UK, 1999; pp. 1–19. [Google Scholar]
- Yuen, T.T.; Boecking, M.; Stone, J.P.; Tiger, E.P.; Gomez, A.; Guillen, A.; Arreguin, A. Group Tasks, Activities, Dynamics, and Interactions in Collaborative Robotics Projects with Elementary and Middle School Children. J. STEM Educ. Innov. Res. 2014, 15, 39–45. [Google Scholar]
- Dillenbourg, P.; Jermann, P. Designing Integrative Scripts. In Scripting Computer-Supported Collaborative Learning: Cognitive, Computational and Educational Perspectives; Fischer, F., Kollar, I., Mandl, H., Haake, J.M., Eds.; Springer: New York, NY, USA, 2007. [Google Scholar]
- Rosanda, V.; Starcic, A.I. The Robot in the Classroom: A Review of a Robot Role. In Emerging Technologies for Education; Popescu, E., Hao, T., Hsu, T.C., Xie, H., Temperini, M., Chen, W., Eds.; SETE 2019, Lecture Notes in Computer Science, 11984; Springer: Cham, Switzerland, 2020. [Google Scholar] [CrossRef]
- Lee, K.M.; Park, N.; Song, H. Can a robot be perceived as a developing creature? Effects of a robot’s long-term cognitive developments on its social presence and people’s social responses toward it. Hum. Commun. Res. 2005, 31, 538–563. [Google Scholar] [CrossRef]
- Belpaeme, T.; Kennedy, J.; Ramachandran, A.; Scassellati, B.; Tanaka, F. Social robots for education: A review. Sci. Robot. 2018, 3, eaat5954. [Google Scholar] [CrossRef] [PubMed]
- Geerts, J.; de Wit, J.; de Rooij, A. Brainstorming with a Social Robot Facilitator: Better Than Human Facilitation Due to Reduced Evaluation Apprehension? Front. Robot. AI 2021, 8, 657291. [Google Scholar] [CrossRef] [PubMed]
- Baghaei, R.P.; Lee, K.J.; Law, E.; Kulić, D. Effects of an Adaptive Robot Encouraging Teamwork on Students’ Learning. In Proceedings of the 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Vancouver, BC, Canada, 12 August 2021; pp. 250–257. [Google Scholar]
- Hamamsy, L.E.; Johal, W.; Asselborn, T.; Nasir, J.; Dillenbourg, P. Learning by Collaborative Teaching: An Engaging Multi-Party CoWriter Activity. In Proceedings of the 28th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), New Delhi, India, 14–18 October 2019; pp. 1–8. [Google Scholar]
- Näykki, P.; Isohätälä, J.; Järvelä, S.; Pöysä-Tarhonen, J.; Häkkinen, P. Facilitating socio-cognitive and socio-emotional monitoring in collaborative learning with a regulation macro script—An exploratory study. Int. J. CSCL 2017, 12, 251–279. [Google Scholar] [CrossRef]
- Zimmerman, B.J. A Social Cognitive View of Self-Regulated Academic Learning. J. Educ. Psychol. 1989, 81, 329–339. [Google Scholar] [CrossRef]
- Rosson, M.B.; Carroll, J.M. Scenario-Based Design. In The Human-Computer Interaction Handbook: Fundamentals, Evolving Technologies and Emerging Applications; Jacko, J., Sears, A., Eds.; Lawrence Erlbaum Associates: Mahwah, NJ, USA, 2002; pp. 1032–1050. [Google Scholar]
- Buchem, I.; Baecker, N. NAO Robot as Scrum Master: Results from a scenario-based study on building rapport with a humanoid robot in hybrid higher education settings. In Proceedings of the Applied Human Factors and Ergonomics International Conference (AHFE 2022), New York, NY, USA, 24–28 July 2022. [Google Scholar]
- Pandey, D.; Subedi, A.; Mishra, D. Improving language skills and encouraging reading habits in primary education: A Pilot Study using NAO Robot. In Proceedings of the 2022 IEEE/SICE International Symposium on System Integration (SII), Narvik, Norway, 9–12 January 2022; pp. 827–832. [Google Scholar]
- Fokides, E.; Kaimara, P.; Deliyannis, I.; Atsikpasi, P. Development of a scale for measuring the learning experience in serious games. Preliminary results. In Proceedings of the Digital Culture & Audiovisual Challenges: Interdisciplinary Creativity in Arts and Technology (DCAC 2018), Corfu, Greece, 1–2 June 2018; Available online: https://ceur-ws.org/Vol-2811/Paper26.pdf (accessed on 27 February 2023).
- Charsky, D. From edutainment to serious games: A change in the use of game characteristics. Games Cult. 2010, 5, 177–198. [Google Scholar] [CrossRef]
- Tourangeau, R.; Rips, L.J.; Rasinski, K. The Psychology of Survey Response; Cambridge University Press: Cambridge, UK, 2000. [Google Scholar] [CrossRef]
- Clark, L.A.; Watson, D. Constructing validity: Basic issues in objective scale development. Psychol. Assess. 1995, 7, 309–319. [Google Scholar] [CrossRef]
- Rodrigues, L.; Pereira, F.D.; Toda, A.M.; Palomino, P.T.; Pessoa, M.; Carvalho, L.S.G. Gamification suffers from the novelty effect but benefits from the familiarization effect: Findings from a longitudinal study. Int. J. Educ. Technol. 2022, 19, 13. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Factor | Item | Statement |
|---|---|---|
| Immersion | 1 | I was deeply concentrated while playing planning poker in my team. |
| 2 | I forgot about the time passing while playing planning poker in my team. | |
| Enjoyment | 3 | Playing planning poker in a team was fun. |
| 4 | I felt bored while playing planning poker in a team. | |
| 5 | I really enjoyed playing planning poker in a team. | |
| 6 | I felt frustrated while playing planning poker in a team. | |
| Perceived usefulness | 7 | Planning poker in a team is an easier way to learn than usual teaching. |
| 8 | Planning poker in a team makes learning more interesting. | |
| Perceived knowledge improvement | 9 | I feel that the game planning poker in a team increased my knowledge. |
| 10 | I understood the idea of agile estimation by playing planning poker in a team. | |
| 11 | I will definitely try to apply what I learned by playing planning poker. | |
| Perceived ease of use | 12 | Planning poker in a team was easy to learn. |
| 13 | Planning poker in a team was unnecessarily complex. | |
| Perceived competence | 14 | I felt competent when playing planning poker in my team. |
| 15 | I felt successful when playing planning poker in my team. | |
| 16 | I felt a sense of control when playing planning poker in my team. | |
| Motivation | 17 | Playing planning poker in a team motivated me to learn. |
| 18 | Playing planning poker in a team stimulated my curiosity. | |
| Perceived relevance | 19 | Planning poker was relevant to my interests. |
| 20 | Planning poker was not relevant to me because I already knew most of it. |
| Item (No.) | Item (Statement) |
|---|---|
| 21 | The interaction with NAO was helpful to understand how to play planning poker. |
| 22 | The interaction with NAO during planning poker was interesting. |
| 23 | The interaction with NAO during planning poker was exciting. |
| 24 | The interaction with NAO during planning poker was motivating. |
| 25 | The interaction with NAO during planning poker was frustrating. |
| 26 | The interaction with NAO was disappointing. |
| 27 | I feel confident in agile estimation after playing planning poker with NAO. |
| 28 | I would like to play planning poker with NAO again. |
| Item | Mean | Std. Deviation |
|---|---|---|
| 1. I was deeply concentrated while playing planning poker in my team. | 3.57 | 0.981 |
| 2. I forgot about time passing while playing planning poker in my team. | 3.43 | 1.186 |
| 3. Playing planning poker in a team was fun. | 3.87 | 1.024 |
| 4. I felt bored while playing planning poker in a team. * | 1.93 | 1.063 |
| 5. I really enjoyed playing planning poker in a team. | 3.48 | 0.960 |
| 6. I felt frustrated while playing planning poker in a team. * | 1.89 | 1.159 |
| 7. Planning poker in a team is an easier way to learn than usual teaching. | 3.78 | 0.964 |
| 8. Planning poker in a team makes learning more interesting. | 4.02 | 0.774 |
| 9. I feel that the game planning poker in a team increased my knowledge. | 3.46 | 0.936 |
| 10. I understood agile estimation by playing planning poker in a team. | 3.91 | 1.092 |
| 11. I will definitely try to apply what I learned by playing planning poker. | 3.70 | 1.072 |
| 12. Planning poker in a team was easy to learn. | 4.15 | 1.095 |
| 13. Planning poker in a team was unnecessarily complex. * | 1.91 | 1.071 |
| 14. I felt competent when playing planning poker in my team. | 3.41 | 1.066 |
| 15. I felt successful when playing planning poker in my team. | 3.65 | 1.016 |
| 16. I felt a sense of control when playing planning poker in my team. | 3.46 | 0.959 |
| 17. Playing planning poker in a team motivated me to learn. | 3.39 | 1.085 |
| 18. Playing planning poker in a team stimulated my curiosity. | 3.28 | 1.129 |
| 19. Planning poker was relevant to my interests. | 3.37 | 1.040 |
| 20. Planning poker was not relevant to me because I already knew most of it. * | 2.83 | 1.371 |
| Item | Mean | Std. Deviation |
|---|---|---|
| 21. The interaction with NAO was helpful to understand planning poker. | 4.07 | 0.975 |
| 22. The interaction with NAO during planning poker was interesting. | 4.28 | 0.655 |
| 23. The interaction with NAO during planning poker was exciting. | 4.04 | 0.842 |
| 24. The interaction with NAO during planning poker was motivating. | 3.63 | 1.123 |
| 25. The interaction with NAO during planning poker was frustrating. * | 1.87 | 1.108 |
| 26. The interaction with NAO was disappointing. * | 1.83 | 1.039 |
| 27. I feel confident in agile estimation after playing planning poker with NAO. | 4.13 | 0.653 |
| 28. I would like to play planning poker with NAO again. | 3.33 | 1.076 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Buchem, I. Scaling-Up Social Learning in Small Groups with Robot Supported Collaborative Learning (RSCL): Effects of Learners’ Prior Experience in the Case Study of Planning Poker with the Robot NAO. Appl. Sci. 2023, 13, 4106. https://doi.org/10.3390/app13074106
Buchem I. Scaling-Up Social Learning in Small Groups with Robot Supported Collaborative Learning (RSCL): Effects of Learners’ Prior Experience in the Case Study of Planning Poker with the Robot NAO. Applied Sciences. 2023; 13(7):4106. https://doi.org/10.3390/app13074106
Chicago/Turabian StyleBuchem, Ilona. 2023. "Scaling-Up Social Learning in Small Groups with Robot Supported Collaborative Learning (RSCL): Effects of Learners’ Prior Experience in the Case Study of Planning Poker with the Robot NAO" Applied Sciences 13, no. 7: 4106. https://doi.org/10.3390/app13074106
APA StyleBuchem, I. (2023). Scaling-Up Social Learning in Small Groups with Robot Supported Collaborative Learning (RSCL): Effects of Learners’ Prior Experience in the Case Study of Planning Poker with the Robot NAO. Applied Sciences, 13(7), 4106. https://doi.org/10.3390/app13074106