
Fuzzy-PID-Based Atmosphere Packaging Gas Distribution System for Fresh Food



Abstract
:1. Introduction
2. Materials and Methods
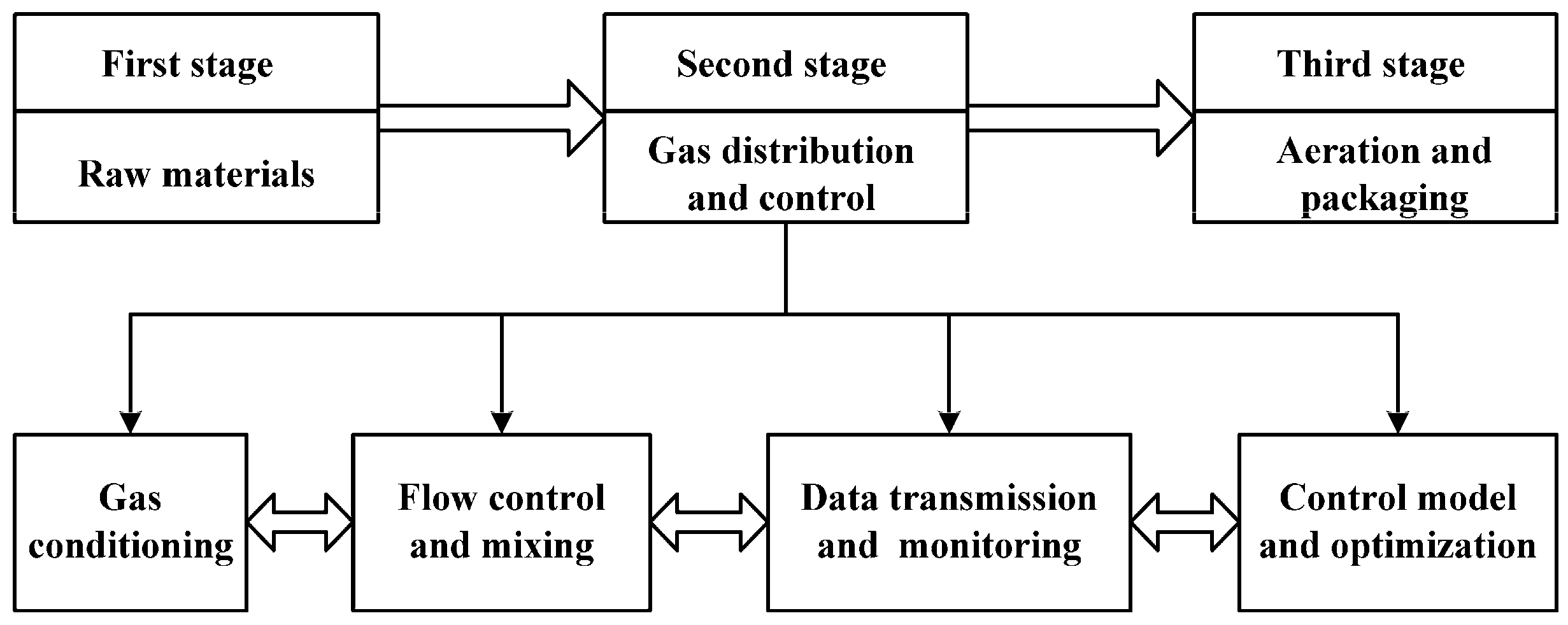
2.1. Gas Distribution Process Analysis
2.2. Gas Distribution Flow Control Model
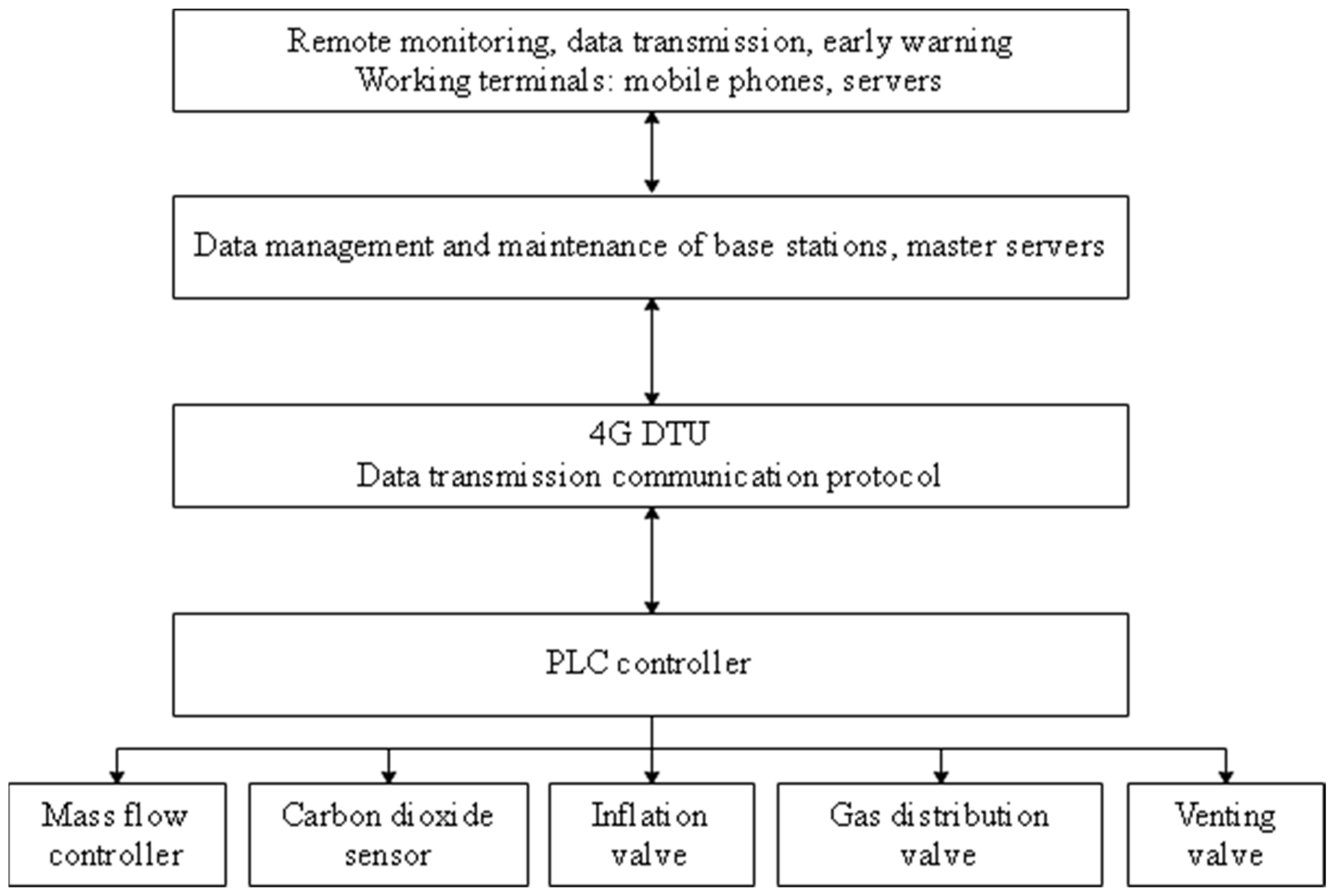
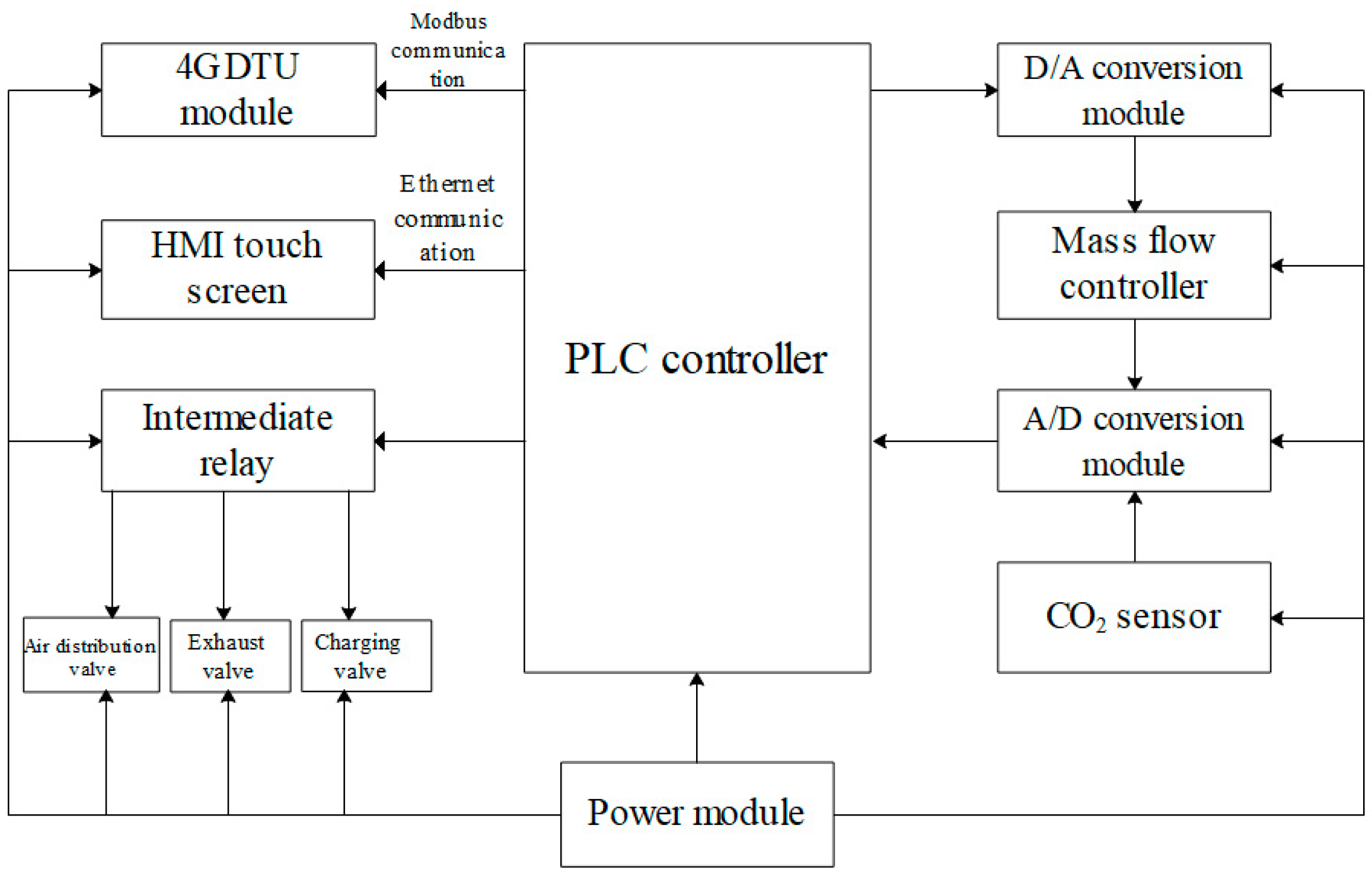
2.3. System Data Transmission and Architecture
- (1)
- Real-time data transmission: the gas concentration and flow rate are monitored in real time by the gas conditioning and preservation gas distribution system, and the data are transmitted to the working terminal and return control system.
- (2)
- Data recording and storage: the historical data are stored so that it would be convenient to check them.
- (3)
- Data maintenance management: the on-site gas concentration and flow rate data could be transmitted to the cloud server.
- (4)
- Completion of on-site equipment correlation, adjustment, corresponding data storage, etc.
2.4. Fuzzy PID Algorithm
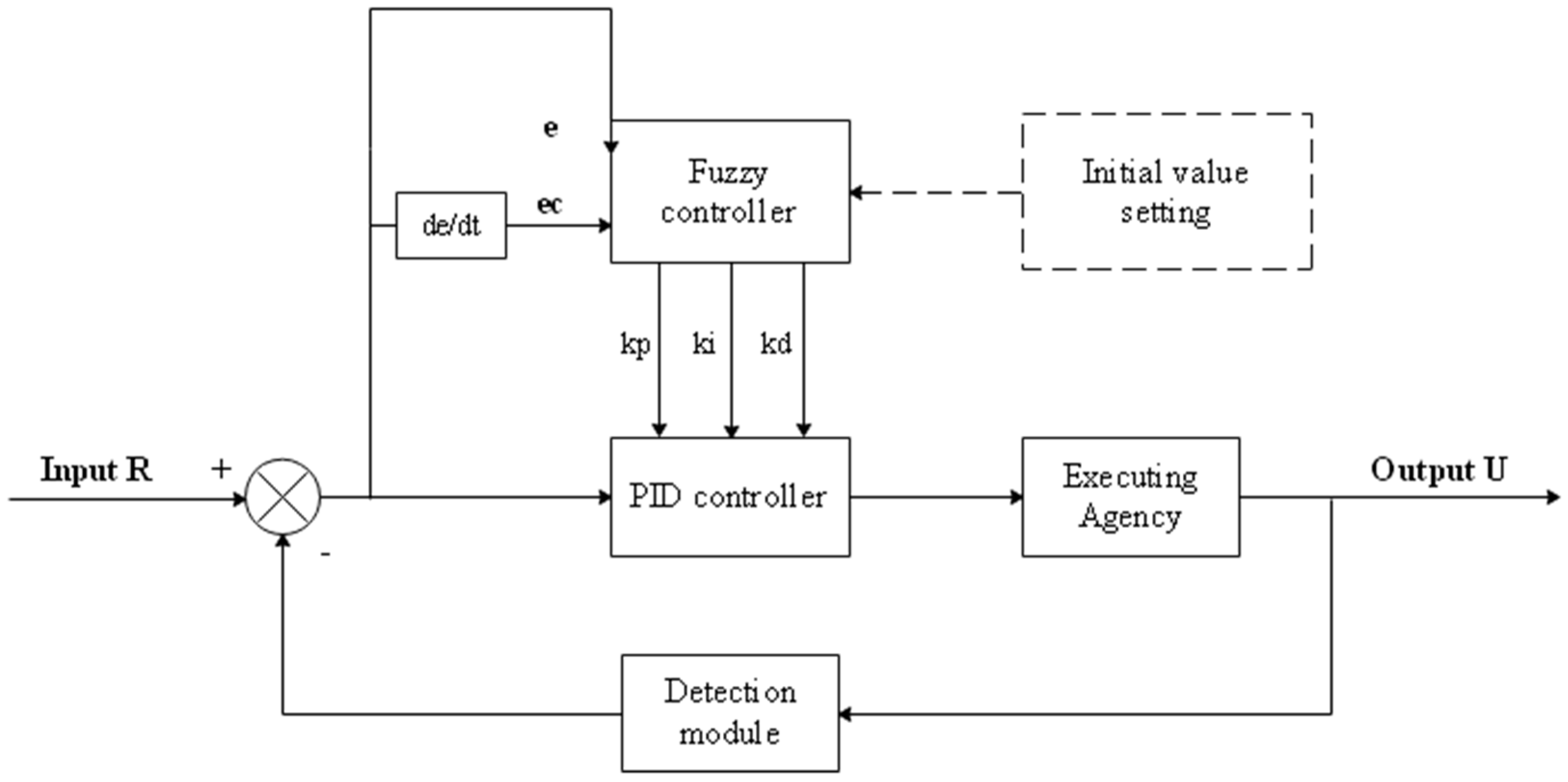
2.4.1. Principle of Fuzzy PID
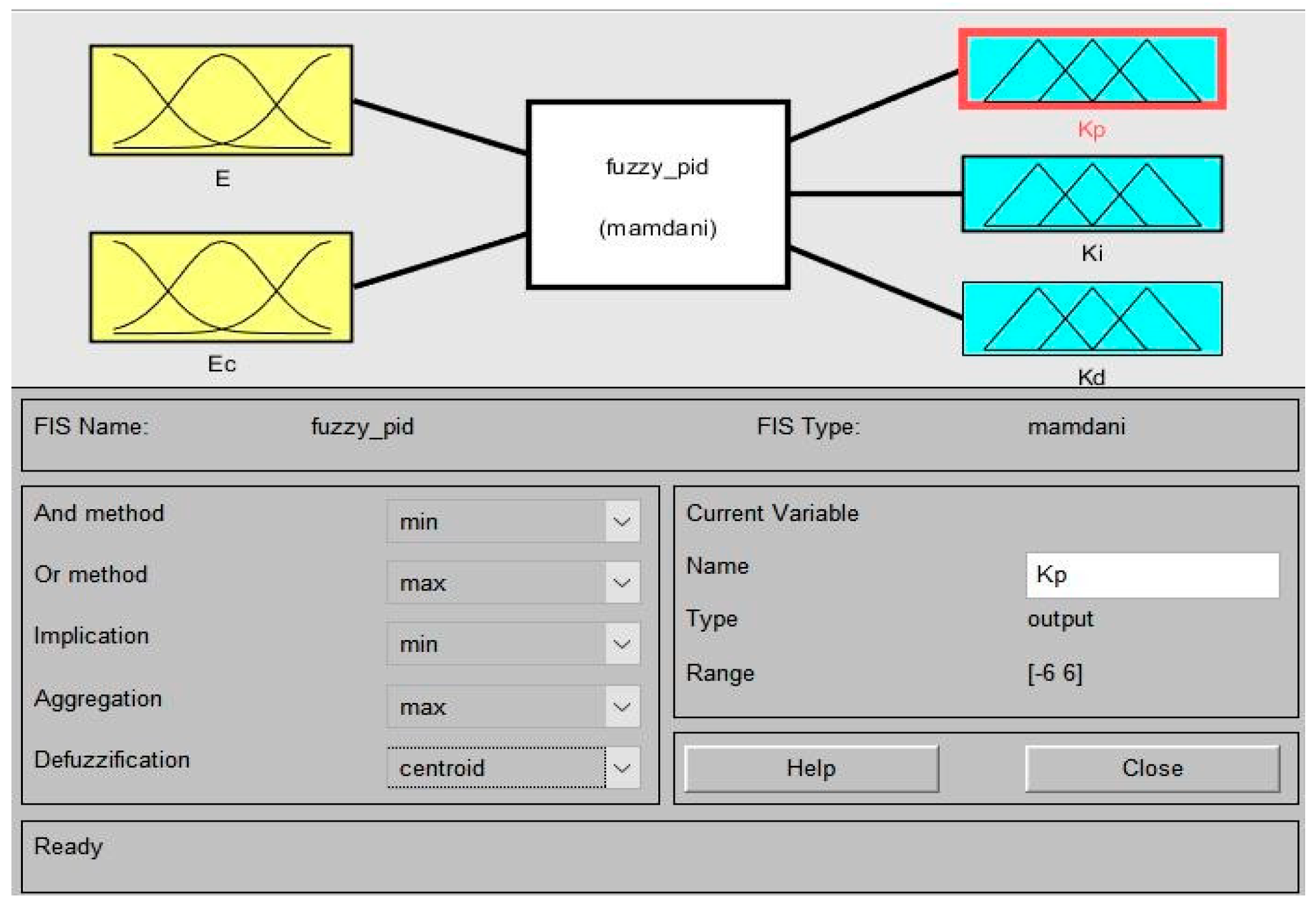
2.4.2. Fuzzy PID Controller Design for Gas Distribution Systems
- (1)
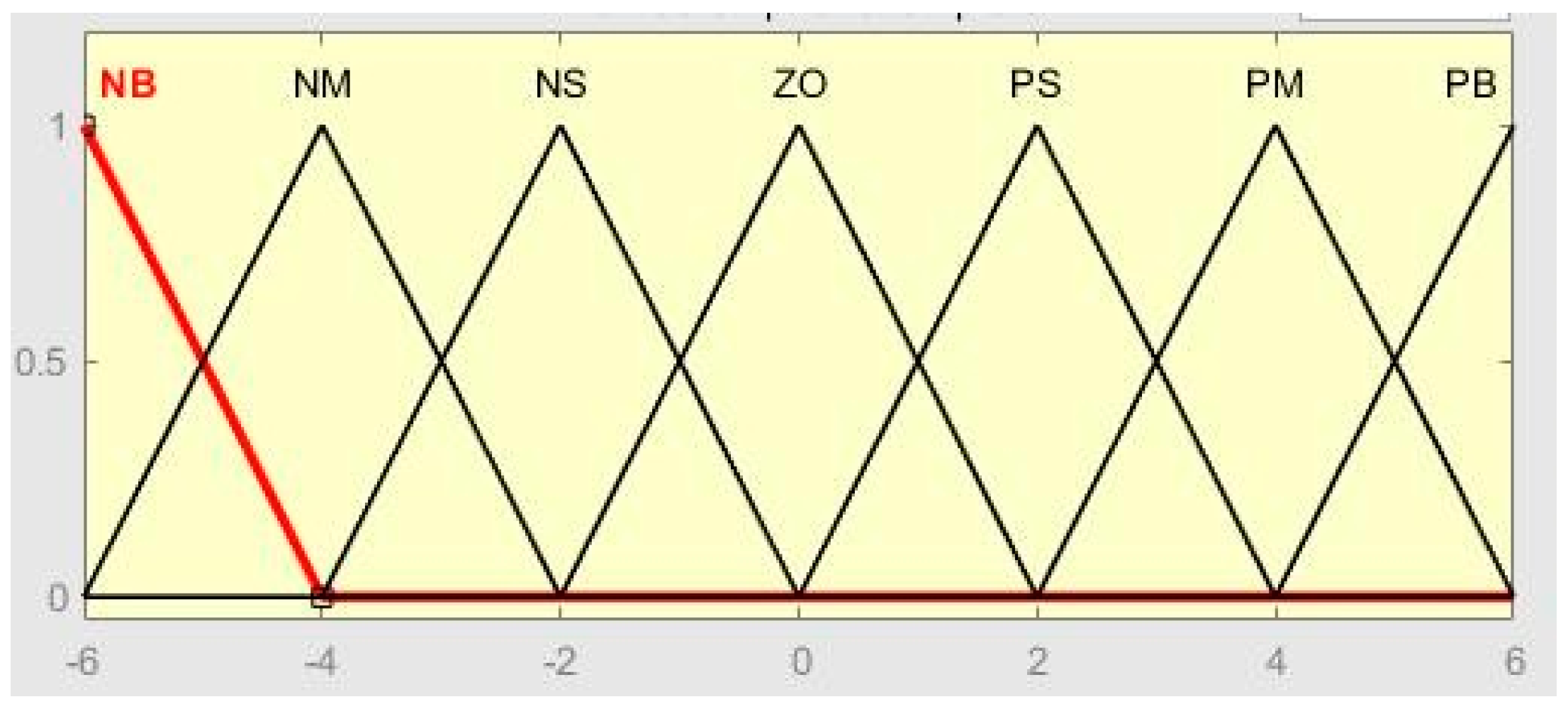
- Fuzzy linguistic variables and fuzzy design
- (2)
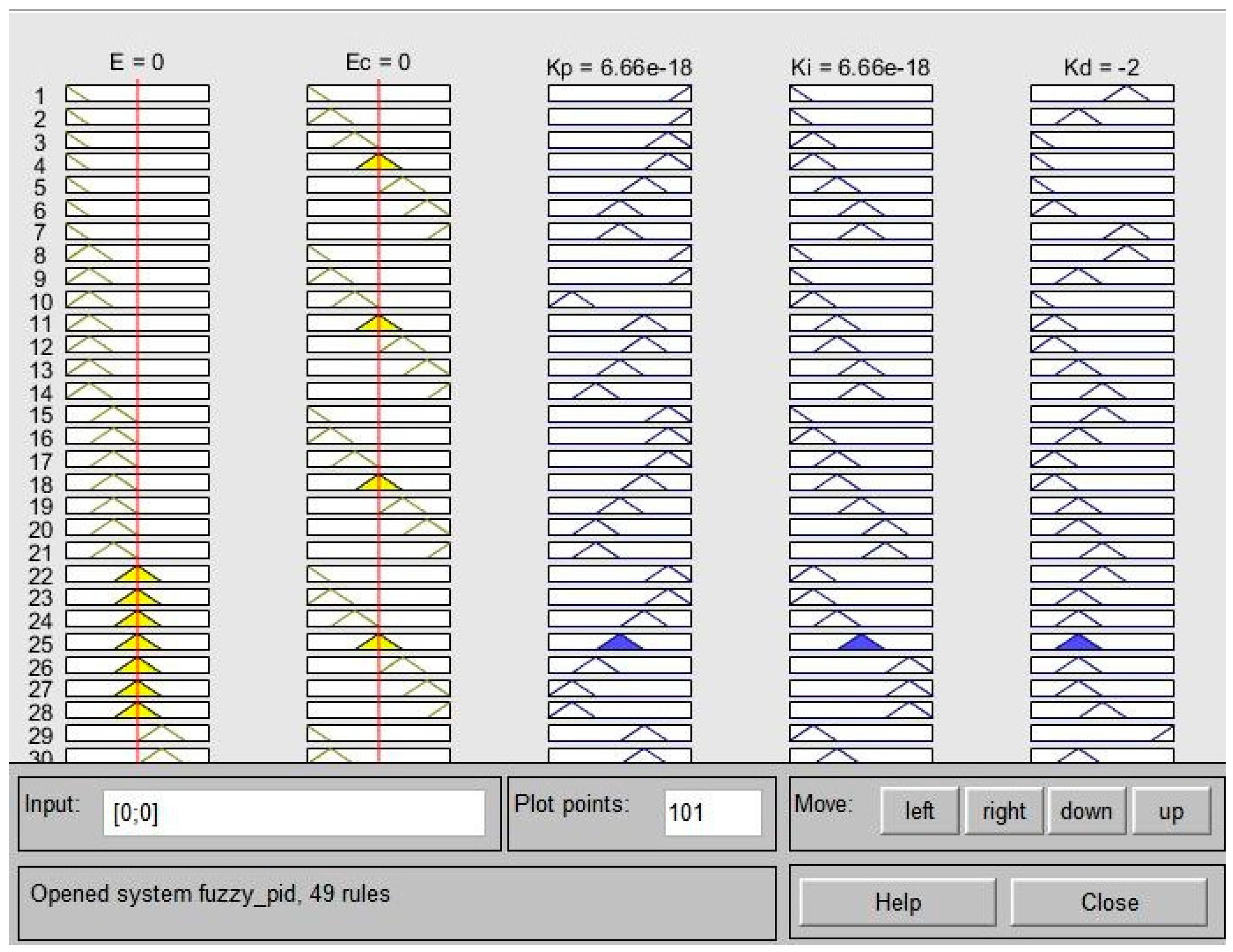
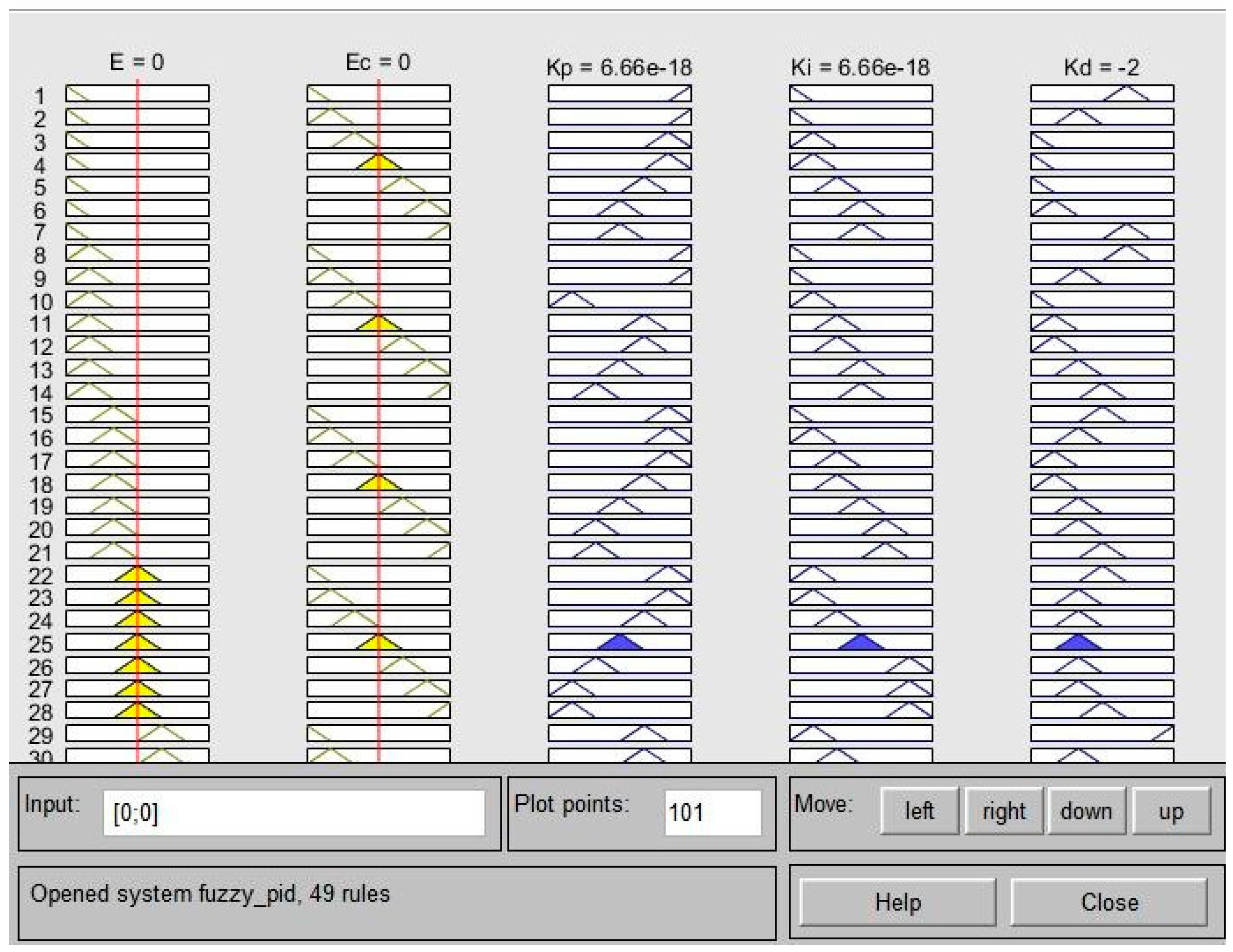
- Fuzzy rule design and defuzzification
- 1.
- If (E is ZO) and (Ec is PS), then (∆Kp is NS), (∆Ki is PM), and (∆Kd is NS).
- 2.
- If (E is ZO) and (Ec is NS), then (∆Kp is PS), (∆Ki is NS), and (∆Kd is NS).
- 3.
- If (E is NS) and (Ec is PS), then (∆Kp is ZO), (∆Ki is ZO), and (∆Kd is NS).
- 4.
- If (E is NB) and (Ec is ZO), then (∆Kp is PS), (∆Ki is NS), and (∆Kd is NB).
- 5.
- If (E is NS) and (Ec is ZO), then (∆Kp is PS), (∆Ki is NS), and (∆Kd is NM).
- ................................................
- ................................................
- ................................................
- 49.
- If (E is PM) and (EC is NS), then (∆Kp is NS), (∆Ki is PS), and (∆Kd is PS).
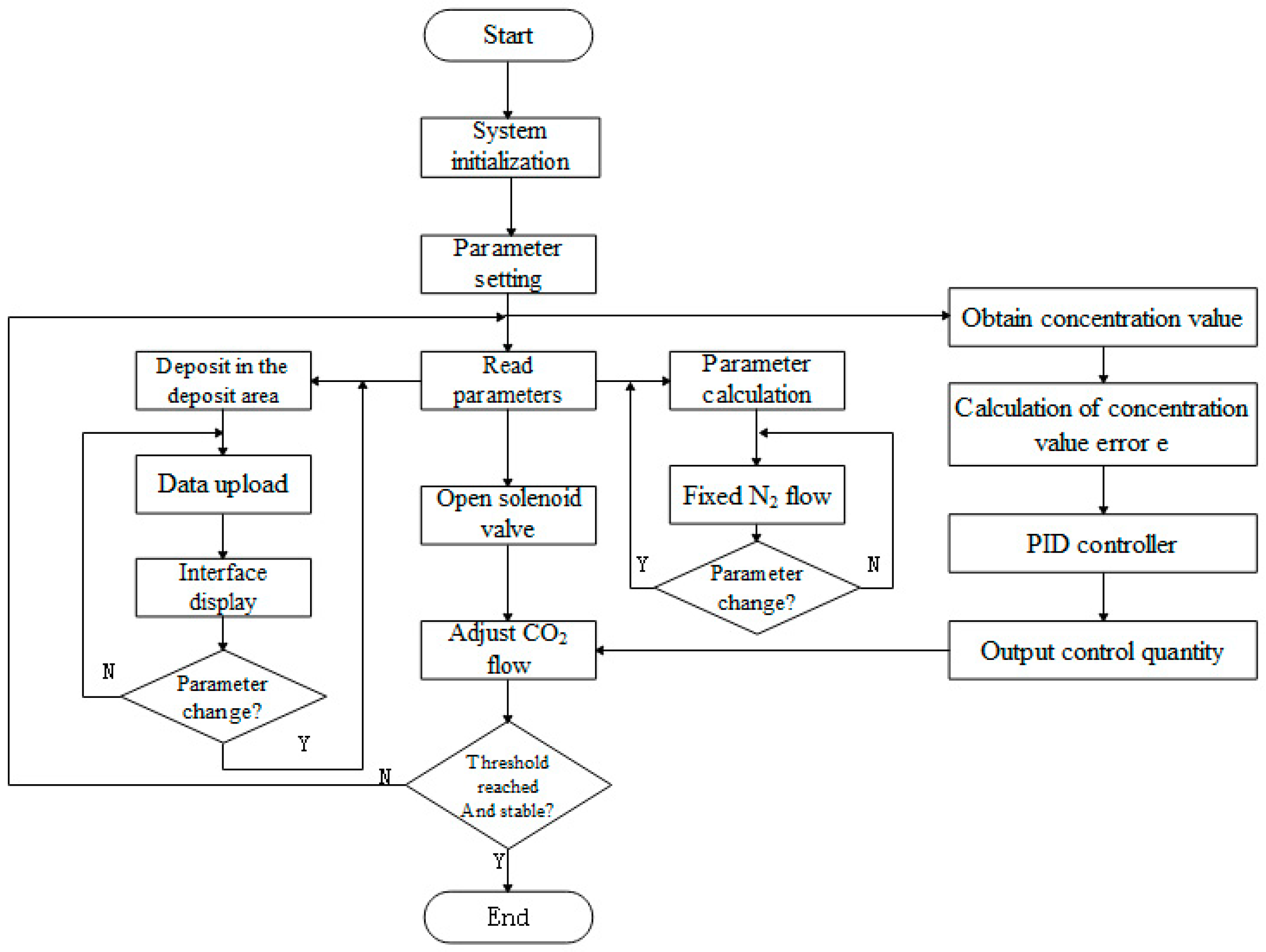
2.5. System Implementation
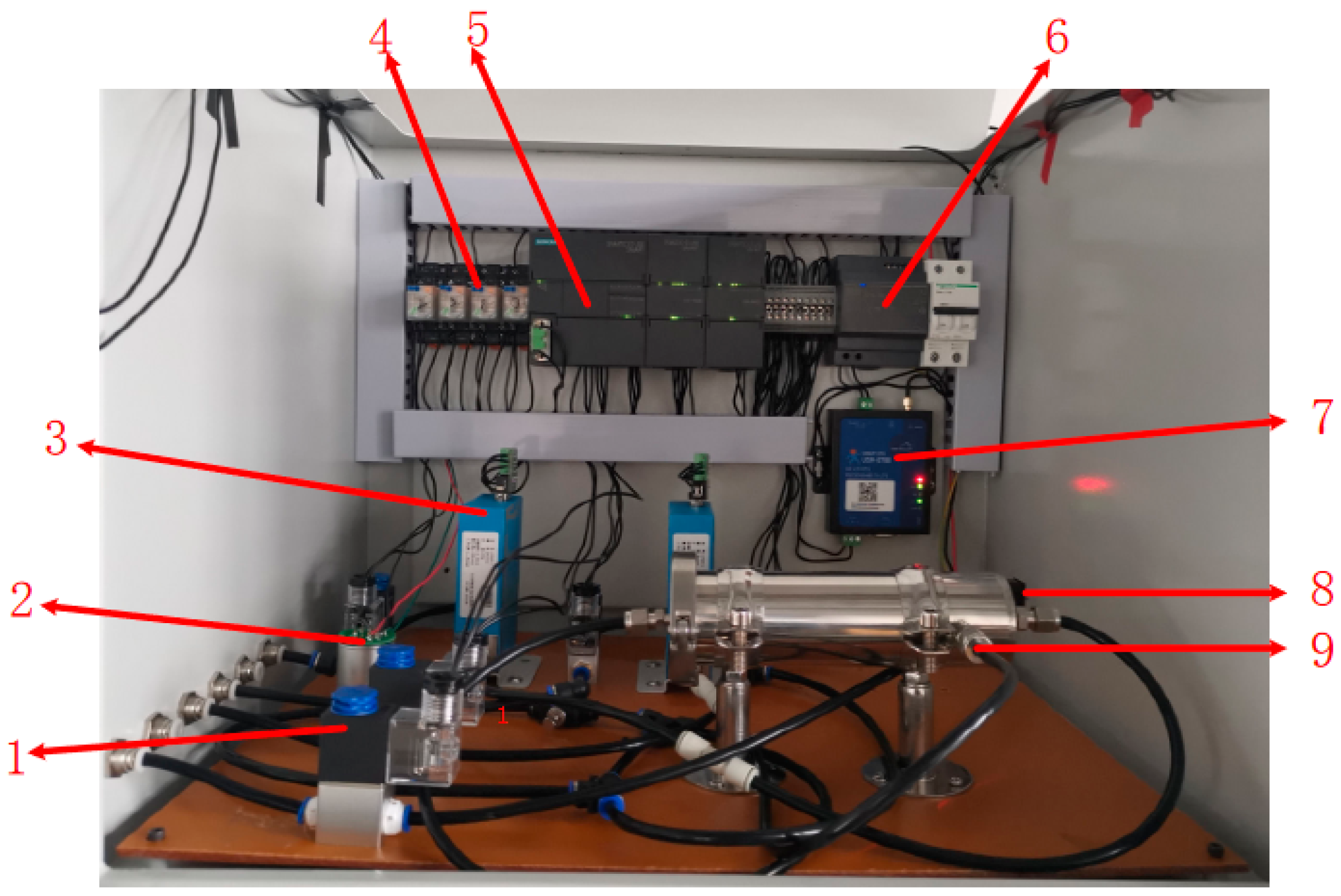
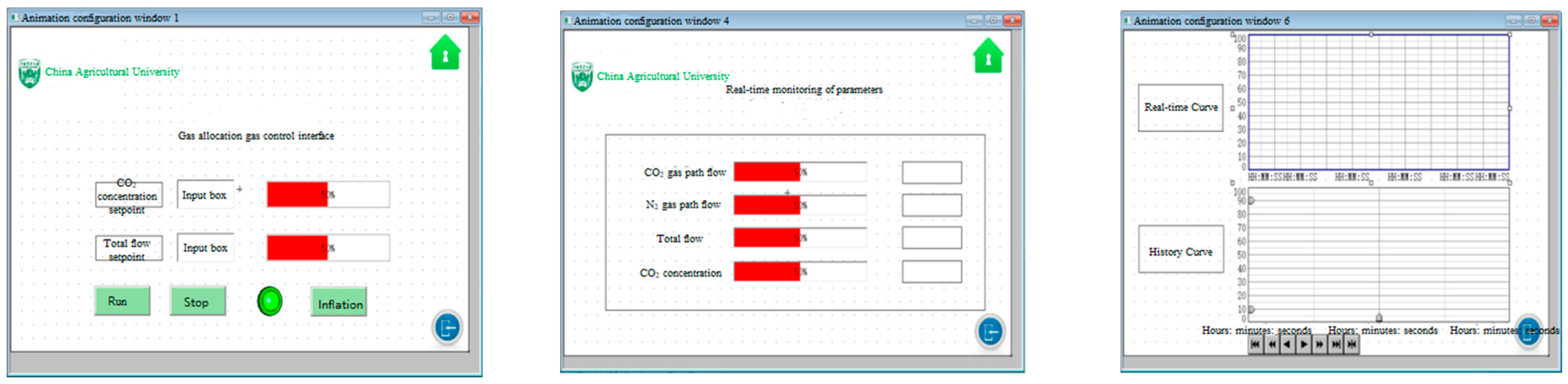
2.5.1. Gas Distribution System Implementation
2.5.2. System Protocol
3. Results and Discussions
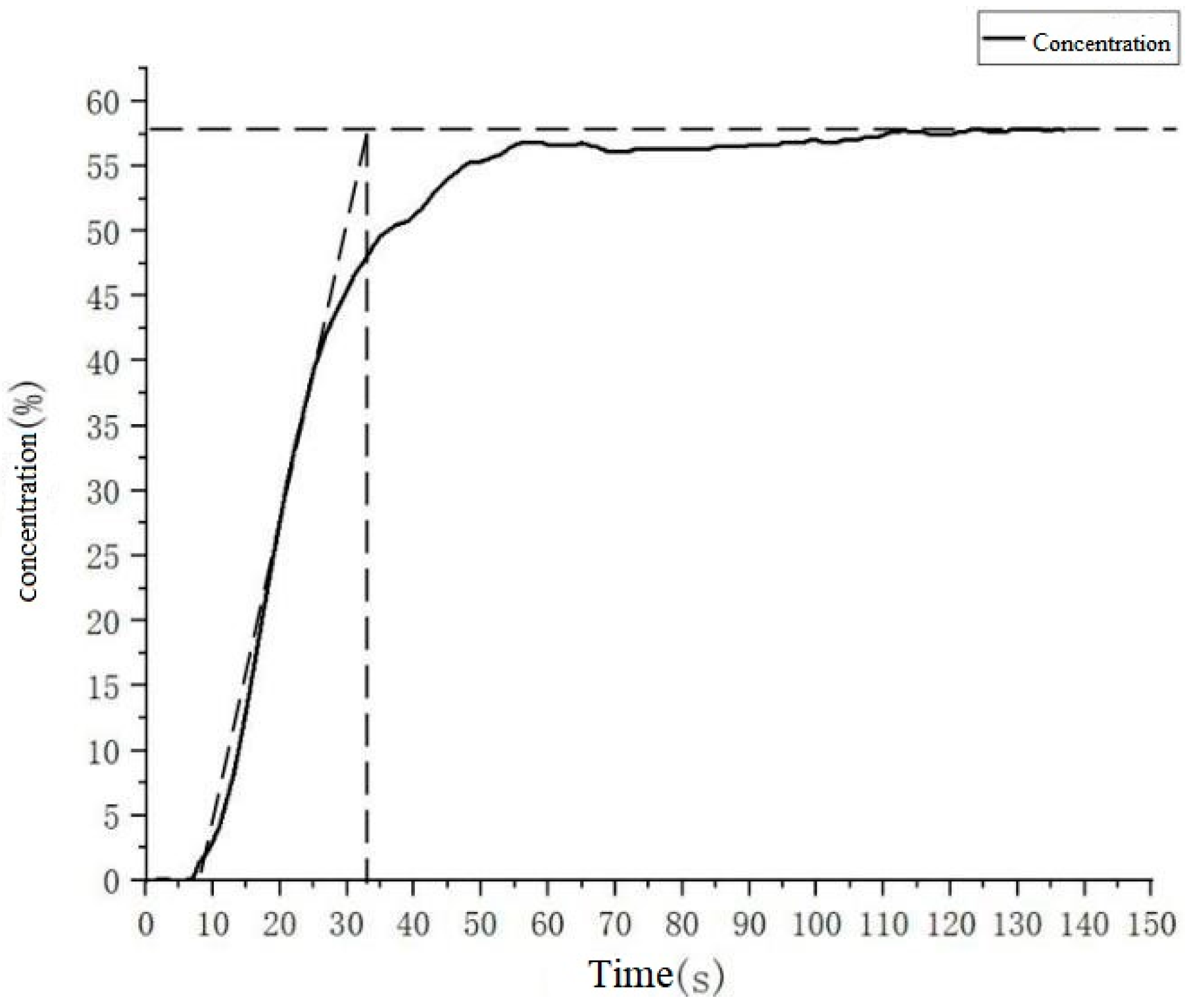
3.1. Parameter Identification and Analysis of the Control Model
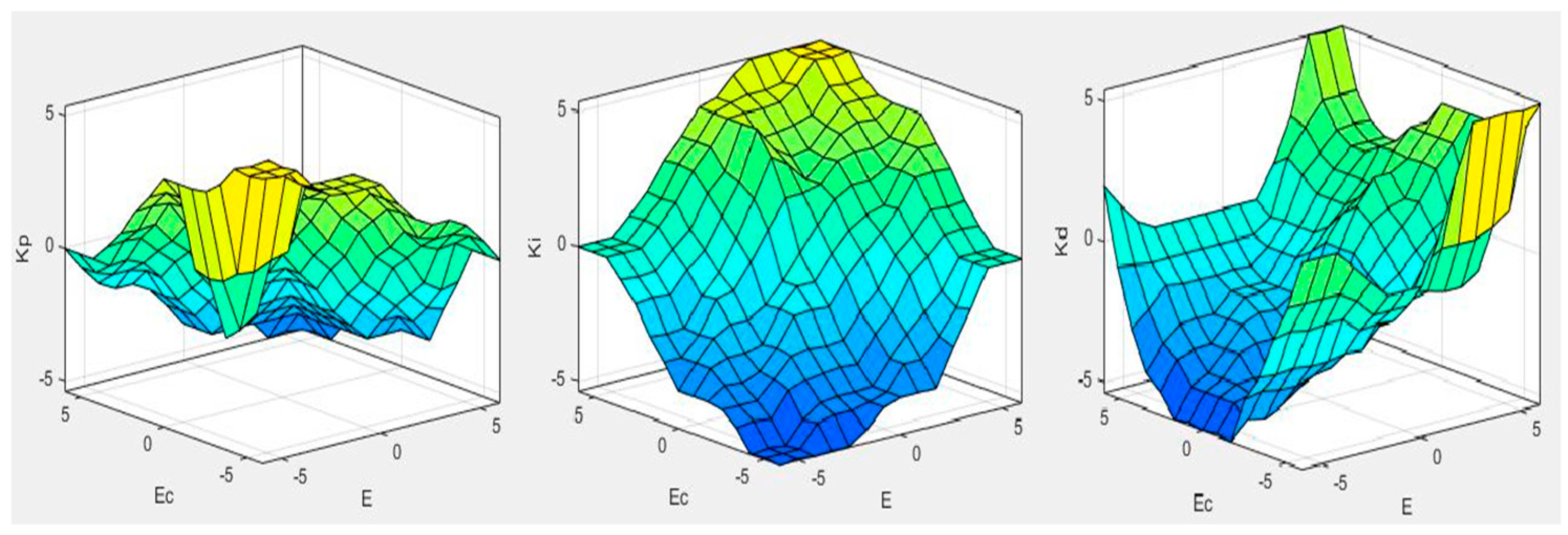
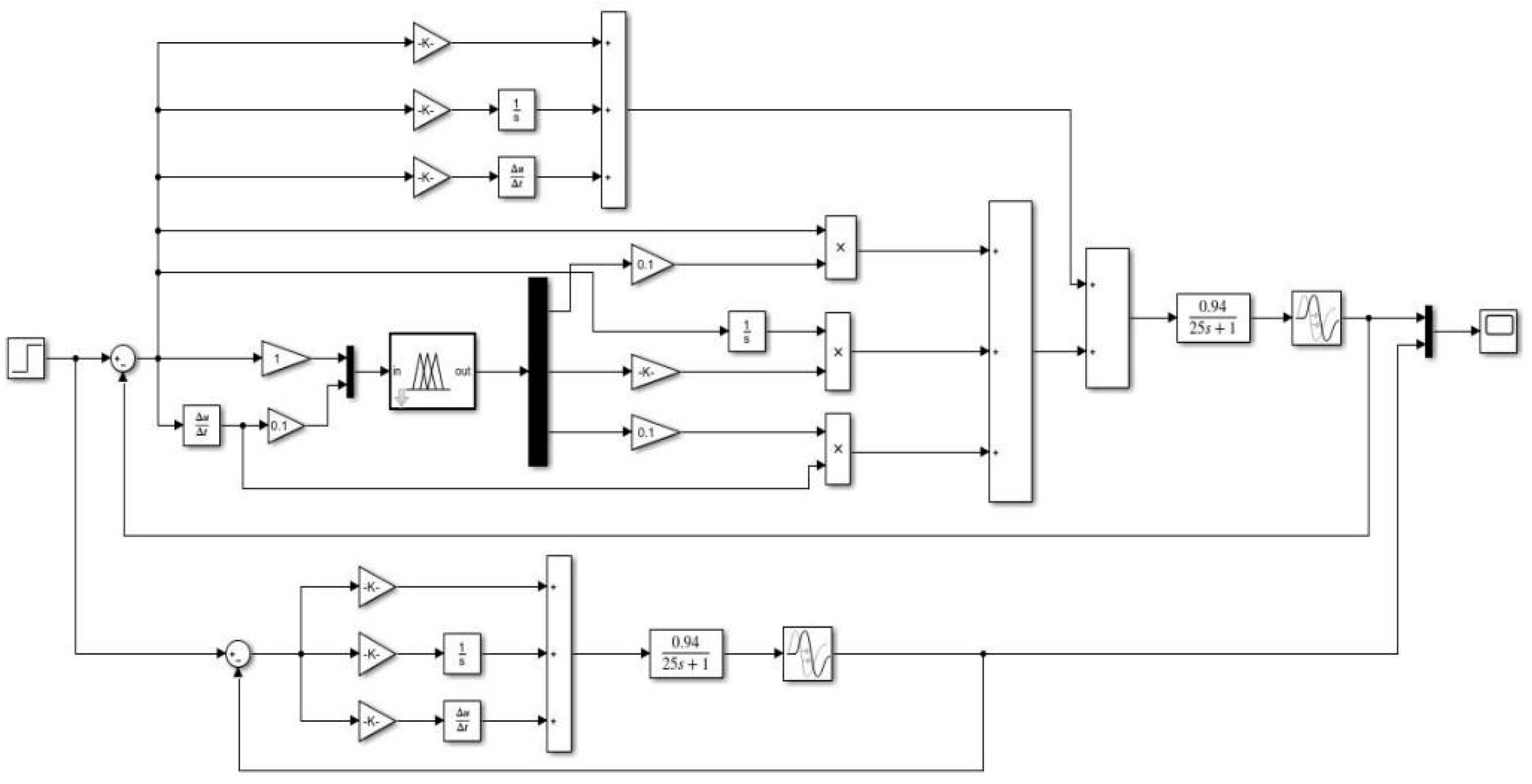
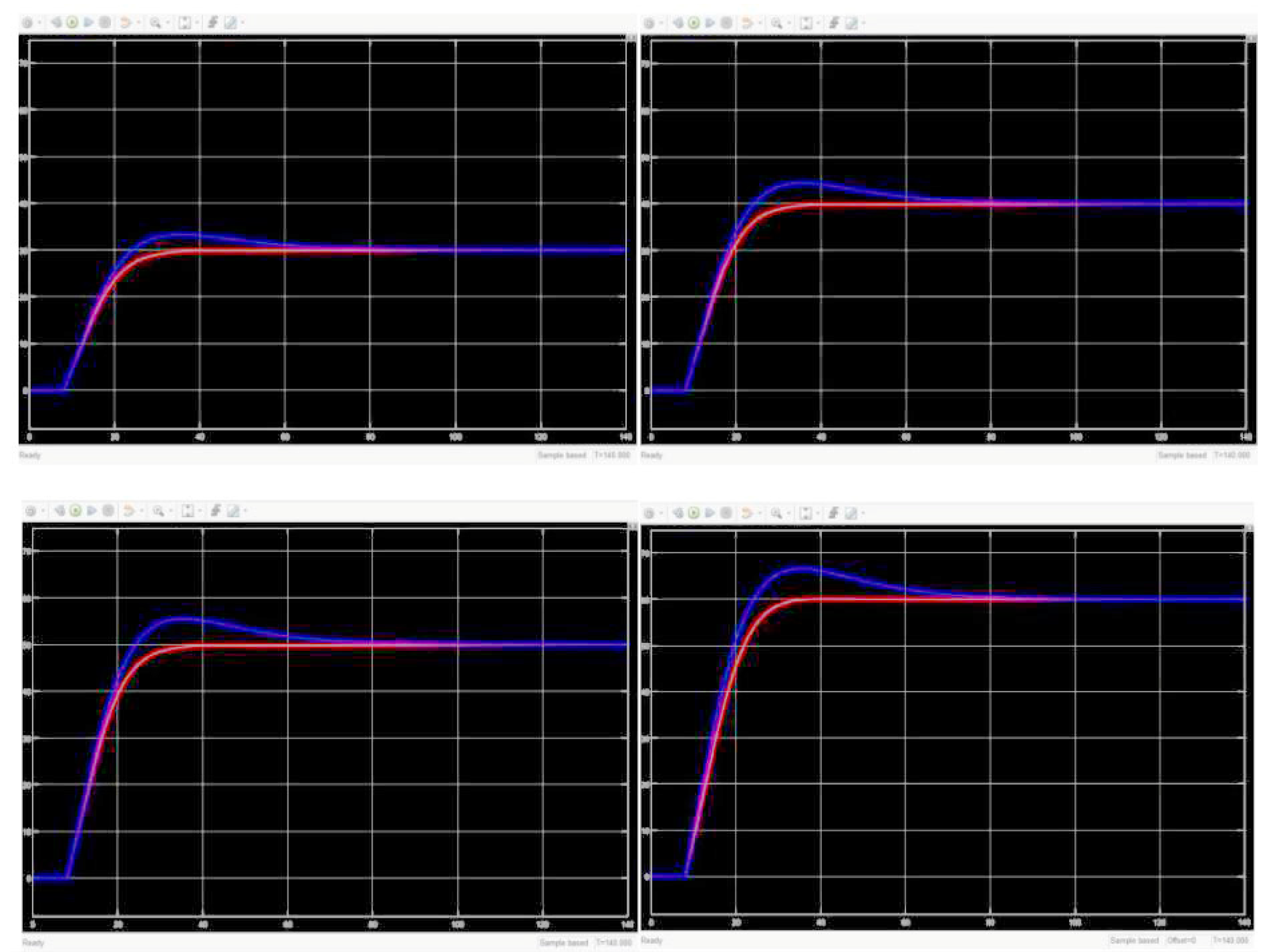
3.2. Fuzzy PID Controller Simulation Analysis
3.3. Gas Distribution System Performance
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, H.; Zuo, X.; Zhang, L.; Liang, B.; Li, X. Automatic gas dynamic volumetric system for aquatic products’ MA preservation. Comput. Electron. Agric. 2022, 199, 107188. [Google Scholar] [CrossRef]
- Ariyamuthu, R.; Albert, V.R.; Je, S. An Overview of Food Preservation Using Conventional and Modern Methods. J. Food Nutr. Sci. 2022, 10, 70. [Google Scholar] [CrossRef]
- Wang, S.; Liu, Z.; Zhao, M.; Gao, C.; Wang, J.; Li, C.; Dong, X.; Liu, Z.; Zhou, D. Chitosan-wampee seed essential oil composite film combined with cold plasma for refrigerated storage with modified atmosphere packaging: A promising technology for quality preservation of golden pompano fillets. Int. J. Biol. Macromol. 2023, 224, 1266–1275. [Google Scholar] [CrossRef] [PubMed]
- Bumbudsanpharoke, N.; Ko, S. Packaging technology for home meal replacement: Innovations and future prospective. Food Control 2021, 132, 108470. [Google Scholar] [CrossRef]
- Saeed, R.; Feng, H.; Wang, X.; Zhang, X.; Fu, Z. Fish quality evaluation by sensor and machine learning: A mechanistic review. Food Control 2022, 137, 108902. [Google Scholar] [CrossRef]
- Qian, Y.-F.; Liu, C.-C.; Zhang, J.-J.; Ertbjerg, P.; Yang, S.-P. Effects of Modified Atmosphere Packaging with Varied CO2 and O2 Concentrations on the Texture, Protein, and Odor Characteristics of Salmon during Cold Storage. Foods 2022, 11, 3560. [Google Scholar] [CrossRef] [PubMed]
- Jeong, G.; Kim, H.M.; Kim, J.; Kim, J.S.; Park, H.W. Effect of storage conditions on the shelf-life extension of fungus-colonized substrates based on Metarhizium anisopliae using modified atmosphere packaging. Sci. Rep. 2022, 12, 1–8. [Google Scholar]
- Atallah, A.A.; Ismail, E.A.; Yehia, H.M.; Elkhadragy, M.F.; Khater, E.-S.G. Proteolytic Development and Volatile Compounds Profile of Domiati Cheese under Modified Atmosphere Packaging. Fermentation 2022, 8, 358. [Google Scholar] [CrossRef]
- Katsouli, M.; Semenoglou, I.; Kotsiri, M.; Gogou, E.; Tsironi, T.; Taoukis, P. Active and Intelligent Packaging for Enhancing Modified Atmospheres and Monitoring Quality and Shelf Life of Packed Gilthead Seabream Fillets at Isothermal and Variable Temperature Conditions. Foods 2022, 11, 2245. [Google Scholar] [CrossRef]
- Zhang, X.-J.; Zhang, M.; Chitrakar, B.; Devahastin, S.; Guo, Z. Novel Combined Use of Red-White LED Illumination and Modified Atmosphere Packaging for Maintaining Storage Quality of Postharvest Pakchoi. Food Bioprocess Technol. 2022, 15, 590–605. [Google Scholar] [CrossRef]
- Huang, W.; Wang, X.; Zhang, J.; Xia, J.; Zhang, X. Improvement of blueberry freshness prediction based on machine learning and multi-source sensing in the cold chain logistics. Food Control 2023, 145, 109496. [Google Scholar] [CrossRef]
- Zhu, Z.; Ma, R.; Draganic, A.; Orovic, I.; Zhang, X.; Wang, X.; Wang, J. Postharvest quality monitoring and cold chain management of fresh garlic scapes based on a wireless multi-sensors system. J. Food Process. Eng. 2021, 45, e13918. [Google Scholar] [CrossRef]
- Xiao, X.; Mu, B.; Cao, G.; Yang, Y.; Wang, M. Flexible battery-free wireless electronic system for food monitoring. J. Sci. Adv. Mater. Devices 2022, 7, 100430. [Google Scholar] [CrossRef]
- Wang, X.; Feng, H.; Chen, T.; Zhao, S.; Zhang, J.; Zhang, X. Gas sensor technologies and mathematical modelling for quality sensing in fruit and vegetable cold chains: A review. Trends Food Sci. Technol. 2021, 110, 483–492. [Google Scholar] [CrossRef]
- Fan, L.; Su, H.; Wang, W.; Zio, E.; Zhang, L.; Yang, Z.; Peng, S.; Yu, W.; Zuo, L.; Zhang, J. A systematic method for the optimization of gas supply reliability in natural gas pipeline network based on Bayesian networks and deep reinforcement learning. Reliab. Eng. Syst. Saf. 2022, 225, 108613. [Google Scholar] [CrossRef]
- Ricardianto, P.; Barata, F.A.; Mardiyani, S.; Setiawan, E.B.; Subagyo, H.; Saribanon, E.; Endri, E. Supply chain management evaluation in the oil and industry natural gas using SCOR model. Uncertain Supply Chain Manag. 2022, 10, 797–806. [Google Scholar] [CrossRef]
- Chen, Y.; Tian, Z.; He, R.; Wang, Y.; Xie, S. Discovery of potential risks for the gas transmission station using monitoring data and the OOBN method. Reliab. Eng. Syst. Saf. 2023, 232, 109084. [Google Scholar] [CrossRef]
- Feng, H.; Wang, W.; Chen, B.; Zhang, X. Evaluation on Frozen Shellfish Quality by Blockchain Based Multi-Sensors Monitoring and SVM Algorithm During Cold Storage. IEEE Access 2020, 8, 54361–54370. [Google Scholar] [CrossRef]
- Wang, M.; Xu, Y.; Yang, Y.; Mu, B.; Nikitina, M.A.; Xiao, X. Vis/NIR optical biosensors applications for fruit monitoring. Biosens. Bioelectron. X 2022, 11, 100197. [Google Scholar] [CrossRef]
- Xiao, X.; Fu, Y.; Yang, Y.; Zhang, X. Sustainable solar powered battery-free wireless sensing for food cold chain management. Sens. Int. 2022, 3, 100157. [Google Scholar] [CrossRef]
- Wang, M.; Yang, Y.; Mu, B.; Nikitina, M.A.; Xiao, X. Millimeter Wave-Based Non-Destructive Biosensor System for Live Fish Monitoring. Biosensors 2022, 12, 541. [Google Scholar] [CrossRef]
- Liu, Y.; Jiang, D.; Yun, J.; Sun, Y.; Li, C.; Jiang, G.; Kong, J.; Tao, B.; Fang, Z. Self-Tuning Control of Manipulator Positioning Based on Fuzzy PID and PSO Algorithm. Front. Bioeng. Biotechnol. 2022, 9, 1443. [Google Scholar] [CrossRef] [PubMed]
- Yun, J.; Sun, Y.; Li, C.; Jiang, D.; Tao, B.; Li, G.; Liu, Y.; Chen, B.; Tong, X.; Xu, M. Self-adjusting force/bit blending control based on quantitative factor-scale factor fuzzy-PID bit control. Alex. Eng. J. 2021, 61, 4389–4397. [Google Scholar] [CrossRef]
- Sain, D.; Praharaj, M.; Bosukonda, M.M. A simple modelling strategy for integer order and fractional order interval type-2 fuzzy PID controllers with their simulation and real-time implementation. Expert Syst. Appl. 2022, 202, 117196. [Google Scholar] [CrossRef]
- Ghamari, S.M.; Narm, H.G.; Mollaee, H. Fractional-order fuzzy PID controller design on buck converter with antlion optimi-zation algorithm. IET Control Theory Appl. 2022, 16, 340–352. [Google Scholar] [CrossRef]
- Yoon, J.; Doh, J. Optimal PID control for hovering stabilization of quadcopter using long short term memory. Adv. Eng. Inform. 2022, 53, 101679. [Google Scholar] [CrossRef]
- Yan, L.; Webber, J.L.; Mehbodniya, A.; Moorthy, B.; Sivamani, S.; Nazir, S.; Shabaz, M. Distributed optimization of heterogeneous UAV cluster PID controller based on machine learning. Comput. Electr. Eng. 2022, 101, 108059. [Google Scholar] [CrossRef]
- Borase, R.P.; Maghade, D.K.; Sondkar, S.Y.; Pawar, S.N. A review of PID control, tuning methods and applications. Int. J. Dyn. Control. 2021, 9, 818–827. [Google Scholar] [CrossRef]
- Wang, J.; Li, M.; Jiang, W.; Huang, Y.; Lin, R. A Design of FPGA-Based Neural Network PID Controller for Motion Control System. Sensors 2022, 22, 889. [Google Scholar] [CrossRef]
- Rodriguez-Abreo, O.; Rodriguez-Resendiz, J.; Fuentes-Silva, C.; Hernandez-Alvarado, R.; Falcon, M.d.C.P.T. Self-Tuning Neural Network PID With Dynamic Response Control. IEEE Access 2021, 9, 65206–65215. [Google Scholar] [CrossRef]
- Veerasamy, V.; Wahab, N.I.A.; Ramachandran, R.; Othman, M.L.; Hizam, H.; Kumar, J.S.; Irudayaraj, A.X.R. Design of single- and multi-loop self-adaptive PID controller using heuristic based recurrent neural network for ALFC of hybrid power system. Expert Syst. Appl. 2021, 192, 116402. [Google Scholar] [CrossRef]
- Nayak, J.R.; Shaw, B.; Sahu, B.K.; Naidu, K.A. Application of optimized adaptive crow search algorithm based two degree of freedom optimal fuzzy PID controller for AGC system. Eng. Sci. Technol. Int. J. 2022, 32, 101061. [Google Scholar] [CrossRef]
- Azaza, M.; Tanougast, C.; Fabrizio, E.; Mami, A. Smart greenhouse fuzzy logic based control system enhanced with wireless data monitoring. ISA Trans. 2016, 61, 297–307. [Google Scholar] [CrossRef] [PubMed]
- Krishna, S.; Vasu, S. Fuzzy PID based adaptive control on industrial robot system. Mater. Today Proc. 2018, 5, 13055–13060. [Google Scholar] [CrossRef]
- Priyanka, E.B.; Maheswari, C.; Thangavel, S. Online monitoring and control of flow rate in oil pipelines transportation system by using PLC based Fuzzy-PID Controller. Flow Meas. Instrum. 2018, 62, 144–151. [Google Scholar] [CrossRef]
- Vinod, J.; Sarkar, B.K.; Sanyal, D. Flow control in a small Francis turbine by system identification and fuzzy adaptation of PID and deadband controllers. Renew. Energy 2022, 201, 87–99. [Google Scholar] [CrossRef]
- Liang, H.; Zou, J.; Zuo, K.; Khan, M.J. An improved genetic algorithm optimization fuzzy controller applied to the wellhead back pressure control system. Mech. Syst. Signal Process. 2020, 142, 106708. [Google Scholar] [CrossRef]
- Jin, X.; Chen, K.; Zhao, Y.; Ji, J.; Jing, P. Simulation of hydraulic transplanting robot control system based on fuzzy PID controller. Measurement 2020, 164, 108023. [Google Scholar] [CrossRef]
- Mok, R.H.; Ahmad, M.A. Fast and optimal tuning of fractional order PID controller for AVR system based on memoriza-ble-smoothed functional algoritm. Eng. Sci. Technol. Int. J. 2022, 35, 101264. [Google Scholar]
- Olivas, F.; Valdez, F.; Castillo, O.; Gonzalez, C.I.; Martinez, G.; Melin, P. Ant colony optimization with dynamic parameter adaptation based on interval type-2 fuzzy logic systems. Appl. Soft Comput. 2017, 53, 74–87. [Google Scholar] [CrossRef]
- Elsisi, M. Improved grey wolf optimizer based on opposition and quasi learning approaches for optimization: Case study autonomous vehicle including vision system. Artif. Intell. Rev. 2022, 55, 5597–5620. [Google Scholar] [CrossRef]
- Izci, D. Design and application of an optimally tuned PID controller for DC motor speed regulation via a novel hybrid Lévy flight distribution and Nelder–Mead algorithm. Trans. Inst. Meas. Control. 2021, 43, 3195–3211. [Google Scholar] [CrossRef]
- Lawrence, N.P.; Forbes, M.G.; Loewen, P.D.; McClement, D.G.; Backström, J.U.; Gopaluni, R.B. Deep reinforcement learning with shallow controllers: An experimental ap-plication to PID tuning. Control Eng. Pract. 2022, 121, 105046. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E | NM | NS | ZO | PS | PM | PB | ||
| EC | ||||||||
| NB | PB | PM | PS | ZO | ||||
| NM | PS | ZO | ||||||
| NS | PM | NM | PM | PS | ZO | NS | NM | |
| ZO | PS | PS | ZO | NS | NM | |||
| PS | ZO | NS | ||||||
| PM | ZO | NS | NM | NM | NB | |||
| PB | ZO | NS | NB | |||||
| E | NB | NM | NS | ZO | PS | PM | PB | |
| EC | ||||||||
| NB | NB | NB | NM | ZO | ||||
| NM | NM | NS | ||||||
| NS | NM | NS | ZO | PS | ||||
| ZO | NS | NS | ZO | PS | PM | |||
| PS | ZO | PM | PS | PM | ||||
| PM | ZO | PS | PM | PB | ||||
| PB | PM | PB | ||||||
| E | NB | NM | NS | ZO | PS | PM | PB | |
| EC | ||||||||
| NB | PS | ZO | PB | |||||
| NM | NS | PM | ||||||
| NS | NB | NM | NS | ZO | PS | |||
| ZO | NB | NM | PS | |||||
| PS | NM | NS | ZO | PS | ||||
| PM | NM | NS | ||||||
| PB | PS | ZO | PB | |||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, H.; Zuo, X.; Sun, B.; Wei, B.; Fu, J.; Xiao, X. Fuzzy-PID-Based Atmosphere Packaging Gas Distribution System for Fresh Food. Appl. Sci. 2023, 13, 2674. https://doi.org/10.3390/app13042674
Zhang H, Zuo X, Sun B, Wei B, Fu J, Xiao X. Fuzzy-PID-Based Atmosphere Packaging Gas Distribution System for Fresh Food. Applied Sciences. 2023; 13(4):2674. https://doi.org/10.3390/app13042674
Chicago/Turabian StyleZhang, Haiyu, Xuanyi Zuo, Boyu Sun, Bingqing Wei, Jiajie Fu, and Xinqing Xiao. 2023. "Fuzzy-PID-Based Atmosphere Packaging Gas Distribution System for Fresh Food" Applied Sciences 13, no. 4: 2674. https://doi.org/10.3390/app13042674
APA StyleZhang, H., Zuo, X., Sun, B., Wei, B., Fu, J., & Xiao, X. (2023). Fuzzy-PID-Based Atmosphere Packaging Gas Distribution System for Fresh Food. Applied Sciences, 13(4), 2674. https://doi.org/10.3390/app13042674