1. Introduction
The dimensions of new and integrated technologies are evolving and providing convenience to users by providing services anytime and anywhere [
1]. The Internet of Things (IoT) network is a combination of connected devices, either heterogeneous or homogeneous, that have the power of sensing and processing, and are equipped with data transmission and network capabilities [
2]. There are various features and characteristics of IoT networks that make them different from other networks. IoT networks are used in industries, homes, education, transportation, and smart grids [
3]. IoT devices are interacting with human interventions and are equipped with different routing and communication standards. The automated actions are performed and data is transmitted back to the central backbone devices. Different standards are involved in IoT networks including IEEE 802.11 (WLAN), IEEE 802.15.1 (Bluetooth), IEEE 802.15.4 (ZigBee), and IPv4 and 6 [
4,
5]. Routing is one of the challenges in IoT networks due to the unique features of devices and networks [
6]. The deployment of devices or nodes makes this network more complex and unpredictable. The heterogeneous nature of networks makes them distinct in terms of resources. Besides these challenges, congested networks, especially in the ground area, sports stadiums, or traffic jam situations are observed. In addition, the continued disconnection, interference, delay, and overhead issues degrade the networks’ performance. To overcome these issues, other solutions such as Unmanned Aerial Vehicles (UAVs) are used to facilitate IoT networks to collect the data from the ground and forward them toward the decision center [
7].
The UAVs’ nodes are providing coverage facilities for environmental monitoring, industrial accident plant safety, and dust from environments in civilian sectors. These networks are also providing services for luggage, medicine, and food deliveries. The UAVs networks are more feasible and convenient for disaster areas where emergency medicine distribution or other important materials need to be delivered. Another use of these applications is providing surveillance targeting and enemy monitoring at border areas. The most popular application of UAVs is for goods and product delivery in urban and rural areas. The UAVs’ nodes are equipped with embedded software, sensors, transmitters, memory, and processing capabilities [
1]. Routing protocols play a significant role in data transmission between UAVs and IoT networks. The used routing protocols are classified and divided into different categories such as a mesh-based protocol, a tree-based protocol, and hybrid or topology-based routing protocols. Tree-based routing protocols are further classified into source-rooted and core-rooted-based routing protocols. Some other types of routing protocols are topology-based, position-based, and hierarchical-based routing protocols [
8]. UAVs have unique properties, such as dynamic topologies, high mobility, and mobility. In high mobility, the performance of the tree-primarily based routing is degraded compared with the mesh routing protocols. The mesh-based protocols are used to keep and manage the control messages that cause routing overhead and result in weak efficiency. In source-based routing, the data packets from the intermediate node need to keep the updated information. The disadvantage of source-based routing is the network overhead. In source-based routing, the bandwidth utilizes because each packet represents the entire route in its header but the routing table size increases in the network. The next stage of routing is forwarding the data toward the destination by using hop-by-hop routing.
Figure 1 shows a UAV’s architecture and components.
Many routing protocols have been designed for UAVs and most of them are not efficient and cause more overhead and delay. In UAVs’ networks, the existing routing protocols are not compatible. Based on routing issues in these networks, more bandwidth will be utilized, frequent routing updates will occur, packet losses will be observed, low convergences will occur in the network, and frequent link failures will be noticed. Energy is another significant factor in UAVs’ networks which has a direct relation with overhead and data delay. There is a need to design a routing solution for UAVs’ networks based on more feasible and efficient routing metrics for routing decisions with less energy consumption parameters. In addition, to complete the pre-planned task and improve time and distance, and optimize the cost, the solution will be based on balanced parameters as per network requirements. The main objective of this paper is to design a routing solution for UAV-based IoT networks. The other objectives of this paper are as follows:
To design a decision-based routing protocol to address the data delay and network overhead issues.
To design a protocol to handle nodes’ mobility and the dynamic topologies of UAVs’ networks by considering feasible routing parameters.
To design an intelligent routing protocol for balanced data communication and the best path findings for data transmission.
The rest of this paper is organized as follows:
Section 2 presents the literature review in the field of IoT and UAV networks and discusses the possible solutions gap.
Section 3 illustrates the design and development phases of the proposed solutions.
Section 5 presents the results and the last section concludes the paper with future directions.
2. Related Work
The authors in [
9] proposed a solution for UAV networks for data collection, especially for the ground networks or devices. In this research, the authors presented a novel system for UAVs’ deployment and data collection from IoT networks. The authors also discussed that when the UAVs’ optimal position, uplink power control, and device linkage are combined then the total transmits of the power of devices are minimized within their Signal-to-Interference Plus-Noise-Ratio (SINR) limitations. In addition, the authors looked into the most efficient method for data collection which is a time-varying method in IoT networks. To complete this feature, the authors used a time-updating strategy, especially for a UAV’s location update based on the device activation process. Furthermore, the authors also discovered the best UAV trajectories for dynamically serving IoT devices while consuming the least amount of energy. These results indicated the UAVs’ deployment reduced the transmit power as compared with the pre-deployed fixed UAVs’ BS. The trade-off is also observed in the UAVs’ nodes’ movements during data transmission.
In [
10], the authors merged both the technology of UAVs with fog computing features to support IoT applications. The proposed architecture provides a virtual environment that is used for the development and deployment of IoT applications. In the proposed architecture, the UAV nodes worked as fog nodes and integrated between the IoT devices and the cloud. Then, the UAV nodes were moved to different locations and they collected the data for different IoT applications. The authors recommended a plug and play interface for automatic discovery. Every UAV–Fog provides broker services and is considered a local broker. The broker only knows about the current services that are owned by that node or services for IoT devices. It has been revealed from simulation experiments that the call made by the UAV–Fog to another node or the cloud or the local IoT device is much faster than when the call is made remotely.
Authors in [
11] designed a UAV solution for data collection from IoT networks. The proposed solution is optimizing 3D (three-dimensional) placement and nodes’ mobility, device–UAV association, and uplink power regulation to allow reliable uplink communications for IoT devices with minimum transmit power. First, the ideal UAV positions and associations are recognized by using the IoT device’s locations at each time instant. The feasible mobility patterns of UAVs’ nodes are further analyzed by using dynamic services in the IoT networks for time-varying networks. The UAVs’ nodes must update their positions after calculating the IoT devices’ activation procedure. Furthermore, the best 3D trajectory for the UAVs is determined whenever the total energy is consumed for UAV mobility. Finally, the findings of the experiment revealed that, compared with deploying stationary aerial Base Stations (BSs), the suggested strategy reduces the overall transmit power of IoT devices by 45%. Furthermore, compared with the stationary scenario, the suggested technique can increase system dependability by up to 28%. The findings also highlighted an intrinsic trade among IoT and UAV devices and between several updates and their time.
In [
12], the authors proposed a technique DSC-UAV (dynamic speed control algorithm for UAVs) to enhance data gathering efficiency and to reduce access traffic for UAV-based BSs. The connection setup procedure is investigated and developed in detail using a cellular network to allow communication between sensor instruments and drones. Furthermore, the data collection performance is calculated and analyzed. The appropriate speed for varied sensor device densities is calculated and confirmed by using analytical models. To maintain high data collection efficiency, UAVs can dynamically modify their speed based on the density of sensor devices inside their coverage areas. Finally, simulation findings revealed that the proposed technique maximizes the data delivery performance and can maintain the access probability, low block probability, low and average access time, and low collision.
Authors in [
13] discussed the pollution issues and related these issues to newly proposed UAV technologies. Air pollution is one of the challenging areas which directly affect human life and health. To save the community from this toxic air pollution, this problem should be solved. There are multiple ways of monitoring air pollution through fixed sensor monitoring units, but these monitoring units have a limited range. There is also a height issue in this scenario. We cannot properly have fixed sensors at a certain height from the Earth’s surface. In this paper, the authors solved this problem by using the IoT network along with UAV nodes. The proposed system monitors the atmosphere and calculates the air pollutants’ data. This data is collected by drone and sent to the ground station. The ground station further processes the information and sends the data to the servers for further data analysis. The experiment results revealed the better performance of the proposed solution.
The authors in [
14], investigated the UAV-assisted IoT communications system and addressed the coverage optimization issues with partial channel information. To improve the coverage issues for UAVs, the nodes assisted the IoT networks. The authors optimized the resource allocation technique and UAV altitude optimization. The authors also optimized the UAV’s altitude and maximized the minimal average rate. The large and small-scale channel fading method was used to characterize the practical propagation environment. Large-scale channel fading was used for gradual variation. The issue as stated did not convex. Block coordinate descent and consecutive convex optimization techniques were used to create an efficient iterative method. The performance of the altitude optimization greatly beat the fixed altitude, according to numerical data. Furthermore, the findings suggested the UAV-assisted node’s performance for IoT data communications systems was highly influenced by the urban environment.
Authors in [
15] highlighted the importance of UAV networks, especially those designed for IoT networks. The authors proposed a UAV deployment solution by using Delay Tolerant Network (DTN) protocol. In this approach, the flight path is determined and examined by using a path planning method called a Hilbert Curve. The UAV’s nodes collect the sensed data by using infrastructure or collect the data without infrastructure. The authors also discussed the four different issues related to the data collection process in IoT networks including large data management, infrastructure-free areas handling, the scalability of IoT networks, and resource allocation. The proposed solution was implemented after a detailed quantitative evaluation process and estimation-based strategy. The results indicated the better performance of the proposed solution in terms of data collection.
Authors in [
16] proposed a data collection scheme for UAV networks integrated with IoT networks. The authors also explored the gateway nodes deployment and energy factor for UAV networks for large Wireless Sensor Networks (WSNs). Because UAVs require smooth pathways, they framed the problem and examined a cost function to determine each UAV’s trajectory. The shortest path was then calculated by using a Travelling Sales Problem (TSP). In the TSP problem, the authors used the pattern search technique to find the distances between cities. The routes from a given TSP tour were then smoothed using the Bezier algorithm. The TSP was used to plan the shortest path and then convert the path by using Bezier curves. The controller function was also utilized to install the UAV locally which was enabled with orbital motion. The findings demonstrated that the suggested technique may collect the data quickly and productively.
Authors in [
17] discussed information gathering which is a significant problem in information-centric IoT networks. These networks ensured the Quality of Services (QoS) for network applications including weather monitoring and fog-haze monitoring. As a result, the coverage of nodes enhances the data receiving and sending capabilities. The proposed solution is a cost-effective and better for improving the coverage ratio. The information is acquired randomly in the prior cases and cause of converge reduction. As a result, optimizing coverage via UAVs reduces the cost for information-centric IoT networks. An approach for UAVs was developed to plan the flying routes to achieve greater coverage ranges and decrease the flight duration to save energy consumption by using distance as a priority and time as a second priority. Because of the need of ensuring coverage ratio, and because UAVs consume less energy, the platform benefits from employing them at a lower level.
In [
18], the authors proposed a T-SIoTs “Trust Data Collections via Vehicles” solution by using UAVs nodes in smart IoT networks. This scheme was created by using the statistical graphical model to assess the trust completely. It aimed to create a trust-based system for collecting information by combining trusted vehicles and UAVs. The trust evaluation techniques are passive trusted methods where the trust values are computed and the objects interact. By choosing trustworthy vehicles as the next hop, the scheme ensured security. The T-SIoTs technique aimed to reduce the traveling trajectories of UAVs to save energy. The placements of static nodes provided trustworthy nodes’ mobility. The stored data in those stations were collected by using UAVs. The k-means technique was used to determine the accountable regions of each UAV. Secondly, the routing strategy determined the flight routes of each UAV to gather the data in the accountable regions. The routing strategy reduced the flight routes of each UAV, which minimized the energy usage of UAVs during data collection. The experimental results showed that it not only ensured trust but also saved nodes’ energy.
In [
19], the authors proposed a data collection scheme by using blockchain where the UAVs’ nodes securely collected the data related to healthcare. The collected data was related to the health of the users. The sensor nodes were attached to the patient bodies and then the collected data were transmitted to the UAVs’ nodes. The acquired data were then stored at the nearest location on the server. In the proposed model, all the users and servers had to be registered with the system and each party must have had a public or private key for corresponding. After key generation, every device should have registered its own key and some basic information with a smart contract which was created by using blockchain. Body sensors encrypted the health data with the help of a shared key which was shared before the transformation of the data to the UAVs. The UAVs then used the same shared key to decrypt healthcare data. The UAVs then validated the health data with the help of hashing and digital signatures. On the arrival of the health data, the server requested other validators to give their acceptance for adding health data to the blockchain.
Ad-hoc On-demand Distance Vector (AODV) protocol has also been used for UAV data communication. This protocol uses time slots to avoid congestion in the network. The overhead is observed in the Zone Routing Protocol (ZRP) whereas the Optimized Link State (OLS) routing has good performance [
6] because of its proactive characteristics and the lowest delay due to the use of a border-casting mechanism. Dynamic source routing protocol have suffered with high network load issues due to area dimension, speed, and use of several UAVs nodes. The ZRP routing has the lowest network load when the number of UAVs is the same in constant network load. Because of the multi-point relay mechanism, the OLSR has less network load for the whole scenario.
Discussion
The discussed solutions for IoT and UAV networks for data communication have suffered from different routing issues. The topology-based protocols are especially designed for cellular networks where these protocols are exchanging routing tables for routing updates in the network as mobility is fast in UAV networks where the routing tables update does not suit due to delay and time factors. Topology-based routing creates overhead whenever there is a topology change [
20]. For data communication, the UAVs’ network has suffered with a limited payload or structure-free, unpredictable, or dynamic network topologies. Connectivity is one of the major challenges observed in existing solutions due to the limited communication or radio range of UAVs’ nodes. The coverage area of UUVs nodes is limited and in some scenarios, it is not able to cover the ground, network such as in a forest, disaster areas, or large-scale areas. Some recent studies have utilized machine learning method to predict network topologies although the prediction is not realistic for such networks. The movement of nodes in these networks is very fast, where prediction is not possible. The UAV networks still suffer from various routing challenges where data delay, network overhead, and a lack of connectivity are observed [
21]. Most of the routing protocols are dependent on a connected network status, which is again a weakness because frequent disconnection has been observed in networks where routing has failed. There is a need to design a more preferred routing protocol for data gathering from IoT networks for smooth and feasible data routing as existing routing protocols are designed for ground networks such as IoT, WSN, and cellular networks. However, the nature of UAV networks is unpredictable due to nodes’ movements and their coverage. In this context, the proposed solution addresses the discussed issues by using more preferable and feasible routing parameters for UAV networks. The proposed protocol detects the network density from the ground network and calculates the distance and the UAV nodes call for congested traffic zones by sending one short message. The proposed solution also checks the battery power level to participate in data collection in the network and gives priority to those drones which have enough battery power.
3. Proposed Protocol
This section presents the design and development of the proposed Decision-based Routing for Unmanned Aerial Vehicles and the Internet of Things (DR-UAVIoT) routing solution based on decision criteria. The proposed solution is divided into two main phases including data routing among UAVs’ nodes and data routing from UAVs to IoT infrastructure devices. This solution is used for data routing decisions and only used to gather the data from IoT networks especially when the ground network is congested and not able to forward the data toward the decision center or to the main servers. The IoT infrastructure is used to collect the data and forward it to the UAVs’ nodes and then, from the UAVs’ nodes, the data is forwarded to the cloud or backbone devices for better decision-making. Different steps are involved to design the two main modules of the proposed solution. For the first module (UAV-to-UAV data communication), the protocol provides data routing facilities among UAV nodes to UAV nodes. Whereas, in the second module, the proposed solution is utilized for data gathering from BS and further linked with the IoT network at the ground. Normally the BS has enough resources in the form of bandwidth, transmission power, and coverage. The first module is used for data communication by using node locations services as used in [
22]. The main purpose of location services is to obtain updated and real node locations. The proposed DR-UAVIoT uses location service to serve the IoT network services. The UAVs’ nodes are available in the network to assist the IoT networks in the presence of dense and sparse network conditions. The proposed solution detects the network density on the ground after some time. Based on a distance calculation, the UAV nodes check the number of UAV nodes in the network and call for congested traffic zones by sending one short message. The UAVs also check the battery power level to participate in data collection in the network and give priority to those drones which have enough battery power.
Figure 2 shows the drone components.
The role of the control station of BS is very significant in IoT and UAV traffic. The BS, or control station, is used for supporting the network and providing high-power transmission and receiving features. The fast and perfect data communication of UAVs and IoT nodes is a challenging task because the pure ad hoc networks have limited communication services where the BS provides the support to boost these networks and adjust the UAVs’ nodes’ channel conditions and path. Data collection is a challenging task especially when the BS has not fulfilled the network requirement. Each BS uses a certain frequency to minimize the interference whereas the communication range of BS is determined by the size of the cell. The BS is connected with the central entity called the mobile telecommunication switching office for further data analysis.
Module 1 (UAV-to-IoT and UAV-to-UAV Data Communication)
In this module, the proposed routing solution is used for data delivery. This module is further divided into main phases including UAV–to-IoT network and UAV-to-UAV data routing. The first phase of UAV-to-IoT is gathering information from ground IoT networks where the location of the node is known by using a Global Positioning System (GPS) [
23]. The UAV has a routing strategy to identify the targeted location such as a stadium, ground, or any disaster area by using real-time information on nodes density on the ground IoT network. In the first step, the proposed DR-UAVIoT protocol collects the nodes’ density information from the centralized IoT infrastructure. In the second step, the UAVs’ nodes detect the connectivity factor and select the exact required area for data gathering. For the node density, the proposed solution specifies the area which is already segmented into fixed zones and uses a communication range of up to 250 m. UAVs’ nodes cover each area zone and update the information by using Hello packets with IoT nodes at the ground. Every single UAV node is updated in terms of the routing table by using the node’s density information.
Figure 3 shows the entire process of hello packets exchange at the ground.
The routing table is updated at the UAV side where the number of nodes and their location as per zone area is registered.
Equation (1) shows the calculation of total IoT nodes information in the selected zone.
The
denotes the total number of zones in a fixed area whereas the
denotes the number of nodes in the IoT network. On the other hand, connectivity is another significant criterion used in the proposed protocol which is detected and calculated by using density information collected from BS. By using the nodes’ density table, the UAV nodes check the degree of connectivity and compute it. The density table contains the nodes’ density information by using density information collected from BS. The proposed DR-DR-UAVIoT protocol is used BS for connectivity and as a backbone infrastructure for service provisions.
Figure 4 shows the BS and UAVs plus IoT nodes communication process.
The BS is one of the main components for data communication in IoT networks which are equipped with communication technologies and standards. The main role of BS is to provide communication services to the IoT nodes and UAV nodes. BS is equipped full of resources such as batteries, processing units, storage devices, and strong long-range receiver and transmission devices. We use GSM IoT (EC-GSM-IoT) services for transmission because it is a low-power wide area network technology to provide long-range, low-complexity cellular communications for IoT devices in a way that conserves energy. Various studies have proved the suitability of GSM IoT service and compared other standards such as Wi-Fi and cellular networks [
24,
25]. The UAVs’ transmission ranges and coverage areas are based on the nodes’ density at the ground [
26]. If the number of nodes in IoT networks is more than the UAV’s then the nodes need more transmission power to sense and gather the data where transmission power for UAV is covered by microcells. Algorithm 1 presents the process of the UAVs-to-IoT network.
| Algorithm 1 (UAV-to-IoT) |
1. Initializing
2. CUAV: The candidate UAV node
3. IoT: IoT network node
4. if (Received traffic density information from IoT network by using BS)
5. then (Set coordinates based on location service) else
6. do Broadcast messages to check nodes density at the IoT network
7. if find congestion in IoT then
8. Collect data from IoT else
9. Wait for a random time and repeat the process
10. end task
11. Set the distance and fly the location side
12. end if
13. end process |
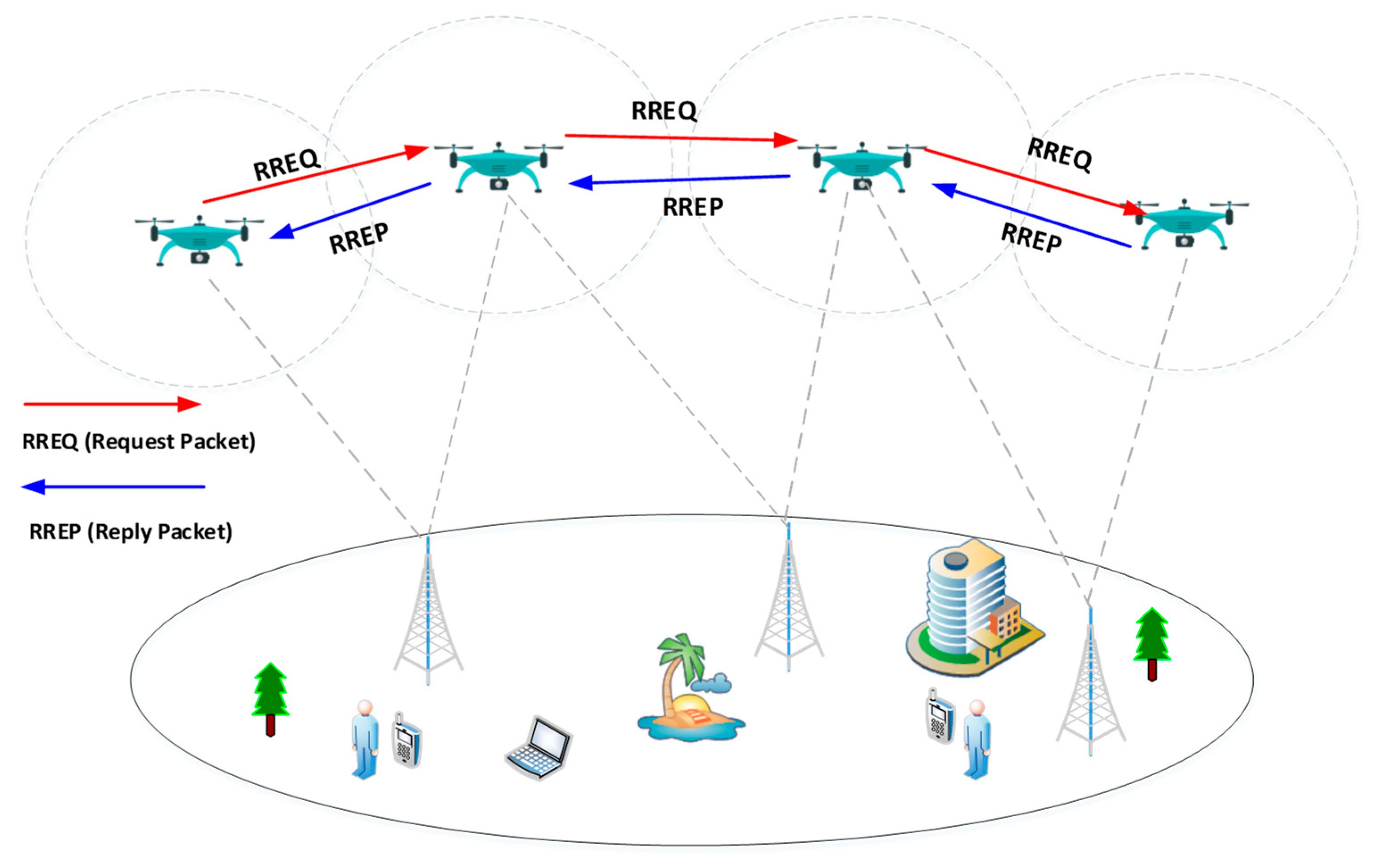
In the second module, the UAV-to-UAV data communication process is initiated. The UAVs’ nodes are communicating with each other to update the ground and its status. This phase uses a reactive routing strategy where protocol establish the routing paths on demand. The main purpose of this module is to search the close and nearest UAV nodes for long time connectivity. Due to the high mobility and movement of UAVs, frequent disconnection is observed and there is not any guarantee for long time data transmission in the network. The proposed DR-UAVIoT protocol takes a decision and maintains and searches the alternate path without restarting the discovery phase. In the first step, the UAV node initiates and updates the routing table about the source location (IoT nodes) and destination location (Main Centre-edge devices). The UAVs forward the data by creating a routing path toward the destination. The Route Request Packet (RREP) packets are forwarded to update the route. Finally, the UAV nodes collect the data from IoT nodes and forward data toward the main center by using other connected UAVs nodes in the sky. The main center is located as per network requirements, for example if this system is working in a sports stadium, the center would be located in the control room. The RREP packets always look for direct link nodes to forward the data packets.
Figure 5 shows the RREP process among UAV-to-UAV nodes.
Algorithm 2 shows the data communication among UAV-to-UAV nodes by using RREQ packets.
| Algorithm 2 (UAV-to-UAV) |
1. Initializing
2. CUAV: The candidate UAV node
3. RREQ: Route Request Packet
4. If (UAV (RREQ)= CUAV) then
5. Drop RREQ
6. else
7. If UAV destination (RREQ)= CUAV) then
8. Route Selected
9. else
10. Wait for a random time and repeat the process
11. Record (RREQ-CUAV)
12. Add RREQ
13. Rebroadcast (RREQ)
14. end if process
15. end process |
The RREQ packet contains the source UAV and Destination UAV IDs, REEQ ID, and lifetime, UAV latitude, longitude, and Altitude information. To handle the broadcast storm issues in the network, the proposed mechanism uses the UAV-ID with an RREQ message, if the same ID is received then the UAV node ignores that ID. The Route Reply (RREP) messages are broadcast from the direct UAV node to acknowledge the receiving status to the source UAV node. After this process, the next step is the routing decision where the nodes share the route information for some time interval. After this time, all the RREQ messages are dropped.
4. Results and Discussion
This section presents the results and discussion on the proposed DR-UAVIoT routing solution. The results are evaluated on different performance parameters. The results showed the performance of the proposed solution as compared with existing solutions. For the design and development phase, we used the most preferable and feasible routing metrics which were extracted from the detailed literature review. The routing decisions are always a challenge for high mobility networks including transportation systems or UAVs based networks [
7]. The node’s mobility is difficult to handle, especially when using UAV networks in traditional simulators such as NS-2.34. Mobility model is used in simulation like SUMO or MOVE to check the mobility of the UAV nodes. These mobility models provide the mobility patterns schemes to facilitate the basic simulation.
The NS-2.34 is stable and more feasible for UAVs and IoT networks. It has technical capabilities and is equipped with a back-end programming platform. The nodes in UAVs and IoT networks need control stations, mobility, network size, and other important elements for running the protocols. The NS-2 simulation is used to evaluate the performance of the proposed solution in different scenarios. The SUMO is used to provide mobility features and is integrated with simulation. SUMO and MOVE are editor and mobility models usually used to test the mobile nodes’ performance. The mobility traces are exported from a SUMO traffic simulator and fed to NS-2.34 for further analysis.
The cellular network nodes’, macro cells’, and UAVs’ settings are set by using the editor. For UAV nodes’ mobility, Random Walk mobility is used to set the altitude up to 200 to 500 Feet. The performance parameters to test the proposed solution are Packet Delivery Ratio (PDR), end-to-end delay, network overhead, and network overhead. The NS-2 simulator uses C and Object-oriented Tool Command Language (OTcl) languages.
Table 1 shows the simulation parameters used to test the proposed solutions.
4.1. Packet Delivery Ratio
In this section, the proposed solution is evaluated in terms of packet delivery ratio. The packet delivery ratio is evaluated in the presence of different IoT devices on the ground and the packet delivery ratio is observed when the UAVs’ nodes collect the data from IoT devices. As seen in
Figure 6, the proposed DR-UAVIoT protocol achieved a higher data delivery ratio as compared with the existing routing protocols, AODV and GyTAR. The proposed DR-UAVIoT protocol was designed for UAVs and IoT devices to collect the data especially when more nodes were present on the IoT network side. As a result, the AODV had a slightly better performance when the density of the nodes was around 150 nodes whereas the GyTAR performance dropped in the presence of 150 nodes compared with the AODV. We also noticed that when the number of IoT devices increased from 150 to 350 then the performance of the AODV dropped due to its routing table and topology information-sharing mechanism. On the other hand, the GyTAR performance was better due to its path selection strategy. The proposed DR-UAVIoT protocol is better in dense situations due to its control messages handling strategy by using RREQ and RREP.
Figure 6 shows the packet delivery ratio of the proposed protocol compared with the existing solutions.
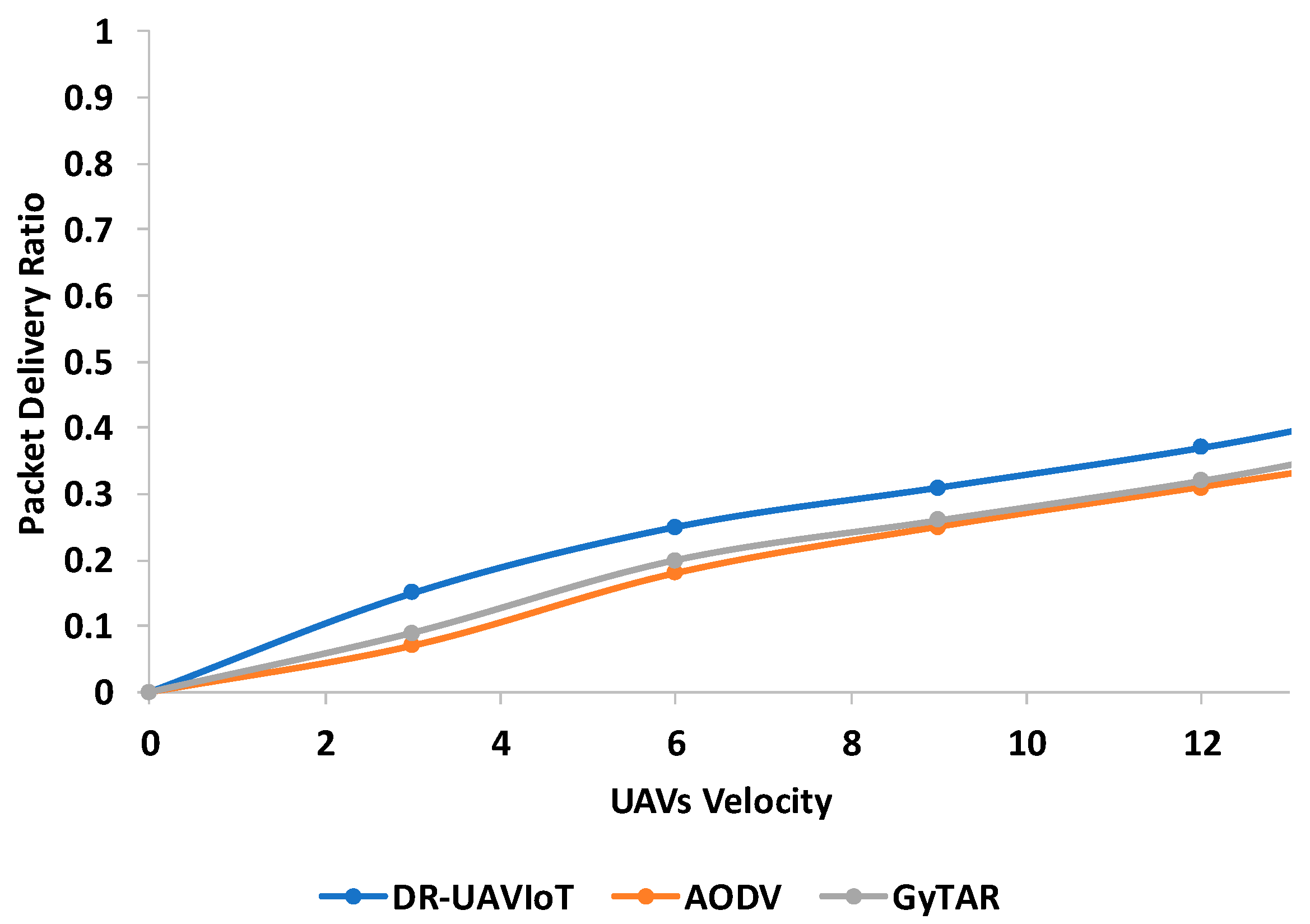
In the second experiment, again we evaluated the proposed protocol in terms of the packet delivery ratio with a different scenario. The packet delivery ratio was evaluated in the presence of different UAVs nodes’ velocities in the sky when the UAVs’ nodes were communicating with each other, such as UAV-to-UAV data communication. As seen in
Figure 7, the proposed DR-UAVIoT protocol achieved a higher data delivery ratio compared with existing routing protocols AODV and GyTAR. The proposed DR-UAVIoT protocol is designed for UAVs and IoT devices to collect the data especially when more nodes are present on the IoT network side. As result, the AODV degraded its performance because this protocol was designed for static nodes and was not feasible for mobility parameters. Whereas the GyTAR performance was better in this parameter because it was designed for vehicular networks which have mobility factors as well. In the presence of 12 km per hour speed, the proposed solution achieved better results and dropped less packets as compared with the AODV and GyTAR. We also noticed, the UAV’s velocity was increased so the packet delivery was better due to the UAV covering limited areas with more mobility and having more chances to achieve better results. On the other hand, the GyTAR performance was better due to its path selection and mobility support strategies. The proposed DR-UAVIoT protocol is better in velocities and node movement situations due to its RREQ and RREP strategy.
Figure 7 shows the packet delivery ratio of the proposed protocol as compared with the existing solutions.
4.2. End-to-End Delay
In this section, the end-to-end delay is evaluated of the proposed DR-UAVIoT as compared with the existing AODV and GyTAR solutions. It is observed from the end-to-end results that DR-UAVIoT has better performance and less delay as compared with AODV and GyTAR protocols. The end-to-end delay was measured in the presence of a different numbers of IoT devices in the networks. The proposed DR-UAVIoT protocol was designed for UAVs and IoT devices to collect the data especially when more nodes were present on the IoT network side.
Figure 8 clearly shows the better and shorter delay time in the presence of more IoT devices in the network. The delay graph smoothly increases due to there being more load on the network resources and data congestion issues. This is one of the problems in ground IoT networks which is resolved by adopting UAV nodes and designing preferable protocols for data transmission. It was also observed that the performance of AODV degraded and consumed more time for data processing compared with GyTAR as AODV was designed for MANET networks and is not feasible for IoT devices due to its limited processing, and memory capabilities.
Figure 8 shows the end-to-end delay results in the presence of different numbers of IoT devices.
The second results are again on the end-to-end delay with different UAV node velocities in the network. The end-to-end delay is one of the significant factors, especially for routing protocols. The proposed DR-UAVIoT had less delay and better results compared with the existing AODV and GyTAR solutions. It was observed from the end-to-end results that DR-UAVIoT had a better performance and less of a delay compared with the AODV and GyTAR protocols. These results were collected when the UAV nodes were communicating with each other in the sky. The end-to-end delay was measured in the presence of different UAV speeds in the networks. The proposed DR-UAVIoT protocol was designed for UAVs and IoT devices to collect data especially when the UAV nodes are moving at different speeds and providing coverage to IoT networks.
Figure 9 clearly shows the better and shorter delay time of the proposed solution when the UAV moves with different velocities. The delay graph smoothly increases due to the higher load on the network resources and data congestion issues. This is one of the problems in ground IoT networks which is resolved by adopting UAV nodes and designing preferable protocols for data transmission. It was also observed that the performance of AODV degraded and consumed more time for data processing compared with GyTAR as AODV was designed for MANET networks and is not feasible for IoT devices due to its limited processing and memory capabilities.
Figure 9 shows the end-to-end delay results in the presence of different UAV nodes’ velocities.
4.3. Network Overhead
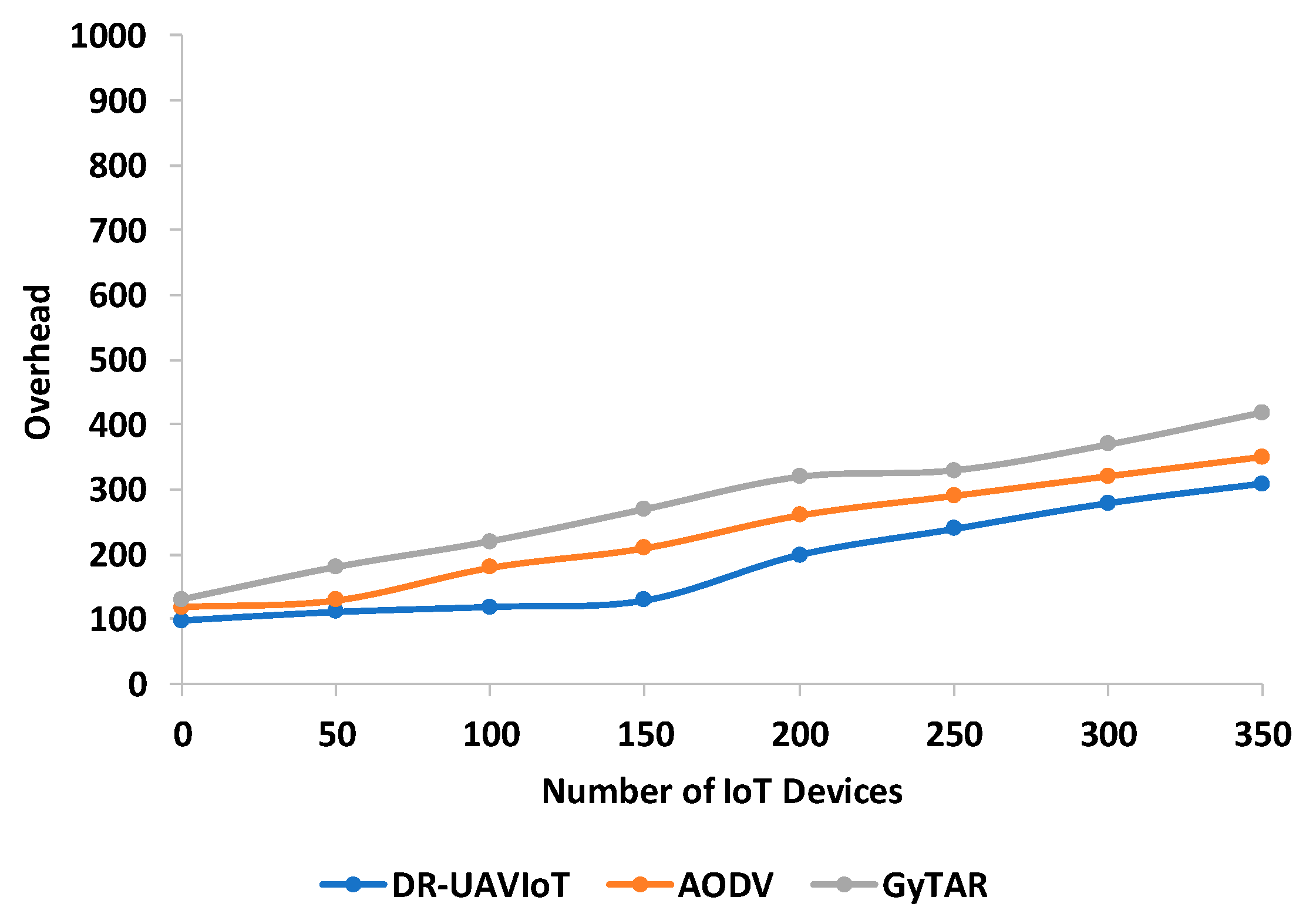
In this section, the network overhead is evaluated of the proposed DR-UAVIoT protocol with existing AODV and GyTAR protocols in the presence of different numbers of IoT devices. In
Figure 10, it is observed that the proposed DR-UAVIoT had less overhead in the number of rounds versus the number of IoT devices. The performance of the proposed DR-UAVIoT was better due to its RREQ and RREP packet strategies. The other existing protocols including AODV and GyTAR also suffered from overhead issues in the network because the AODV is designed for MANET networks whereas the GyTAR is designed for vehicular networks and is not suitable for IoT devices. It is also observed that the overhead gradually increased with the number of IoT devices. The GyTAR protocol is based on control messages which are broadcasted in the network and cause more overhead in the network whereas the AODV protocol generates more overhead due to its static nodes’ handling strategy.
Figure 10 shows the overhead analysis of the proposed protocol in the presence of different numbers of IoT devices.
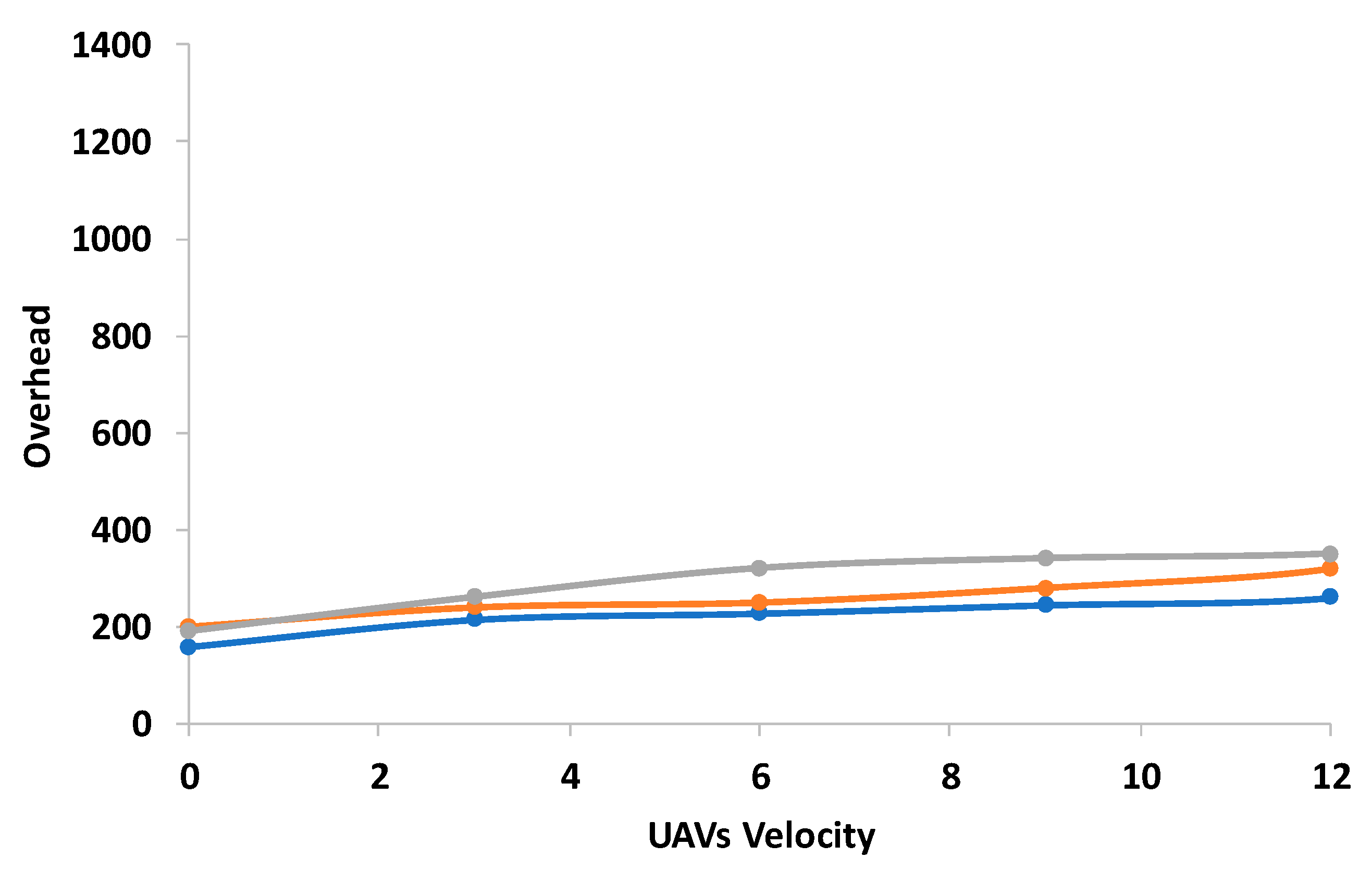
In the second result, the network overhead is evaluated of the proposed DR-UAVIoT protocol with existing AODV and GyTAR protocols in the presence of UAVs’ velocities. This experiment is evaluated among UAV nodes when they transmit and receive data packets from each other. In
Figure 11, it is observed that the proposed DR-UAVIoT had less overhead in the number of rounds versus UAVs’ speed or velocity. The performance of the proposed DR-UAVIoT was better due to its RREQ and RREP packet strategies. The other existing protocols including AODV and GyTAR also suffered from overhead issues in the network because the AODV was designed for MANET networks whereas the GyTAR was designed for vehicular networks and is not suitable for IoT devices. It is also observed that the overhead gradually increased with the number of IoT devices. The GyTAR protocol is based on control messages which are broadcast in the network and cause more overhead in the network whereas the AODV protocol generates more overhead due to its static nodes’ handling strategy.
Figure 11 shows the overhead analysis of the proposed protocol in the presence of different UAVs’ velocities or mobility.
The proposed protocol is designed to reduce the overhead and delay issues in the network although the complexity of the proposed protocol is observed in large areas such as highway roads or covered areas such as tunnels or underground networks. This limitation is due to UAVs’ node coverage issues and the unavailability of communication range due to obstacles.
5. Conclusions
New technologies and communication standards have changed traditional network processes. IoT is one of the emerging technologies where the devices are connected to facilitate the users. When the networks are more congested due to a large number of users in IoT networks then the existing routing protocol and communication channel suffers from congestion, disconnection, overhead, and packet drop issues. UAVs have been introduced to facilitate these networks by collecting the data and forwarding toward the main centers. Traditional static network routing protocols have been adopted for data communication. However, the adopted protocols have suffered from various routing issues. In this paper, the DR-UAVIoT protocol was designed based on decision criteria for IoT networks. The proposed protocols are categorized into two main phases: UAV-to-IoT and UAV-to-UAV data communication. Several experiments were conducted to test the proposed routing protocol’s performance in terms of data delivery, delay, and network overhead. The proposed protocol was also tested with existing protocols AODV and GyTAR to check its performance. The results indicated the better performance of the proposed protocol compared with the existing routing protocols. The proposed solution achieved around 45% (Cumulative Percentage) better performance compared with the existing solution. This percentage showed that the proposed solution is a better option for congested IoT networks. In the future, we will deploy the proposed solution with other networks such as smart grids, smart home systems, and smart cities as well.



 ,
, 












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}