
Design and Application of Intelligent Transportation Multi-Source Data Collaboration Framework Based on Digital Twins


Abstract
:1. Introduction
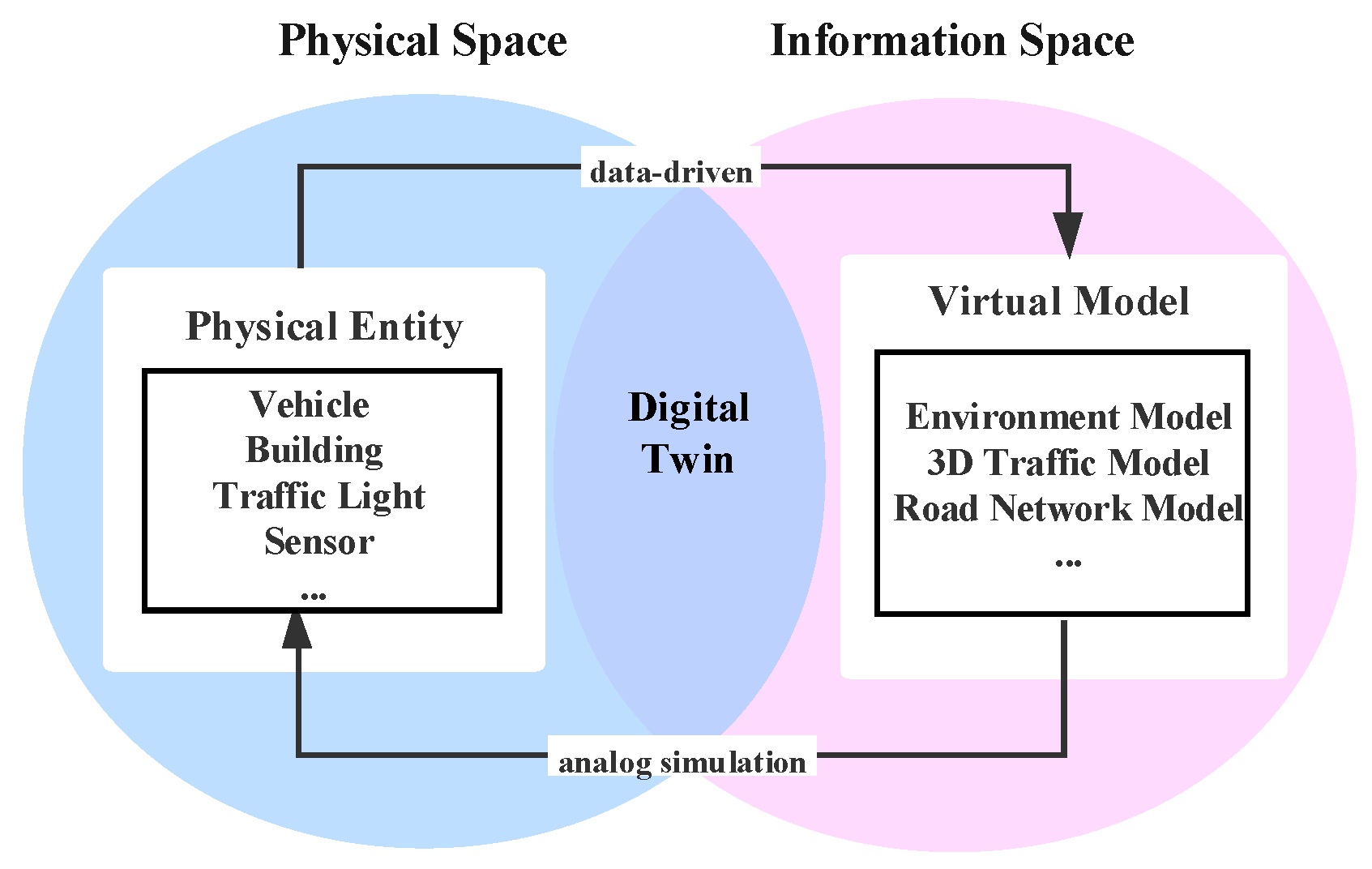
- We proposed an improved digital twin architecture based on a new ITS to enrich the data types of the digital twin.
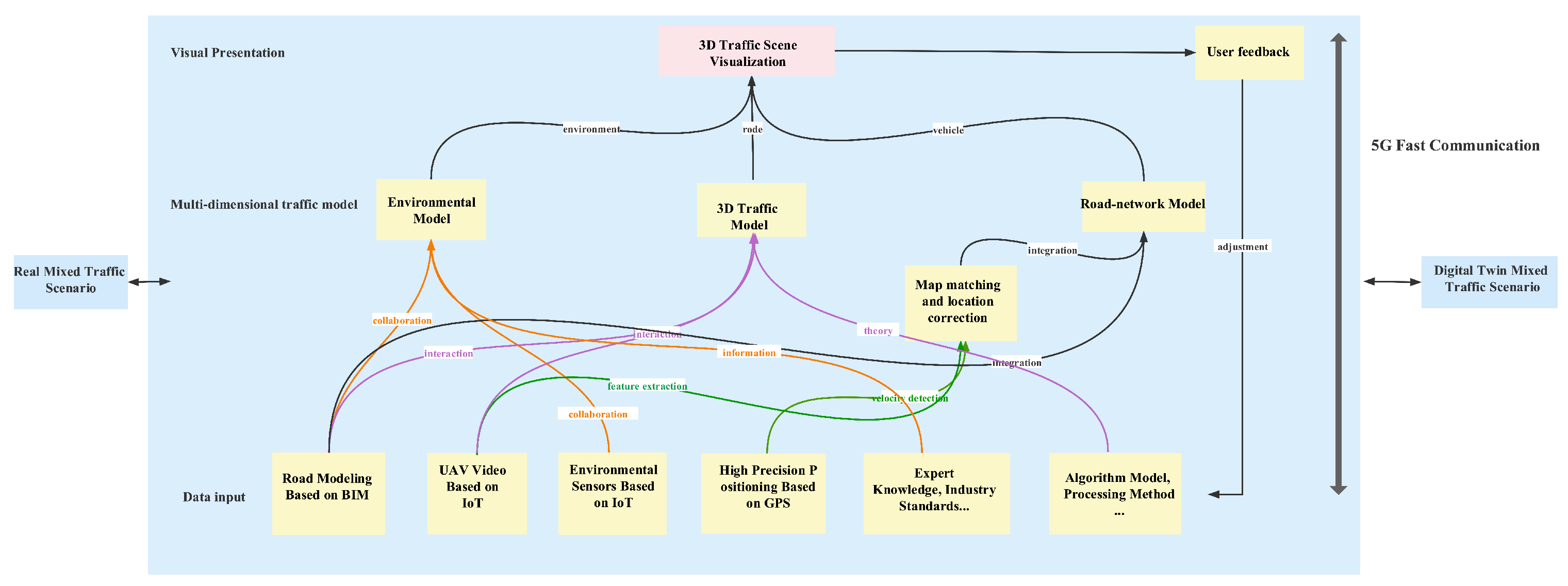
- We used the virtual–physical spatial relationship of digital twin technology to build a data collaboration framework, and its collaboration relationship and input interface were discussed.
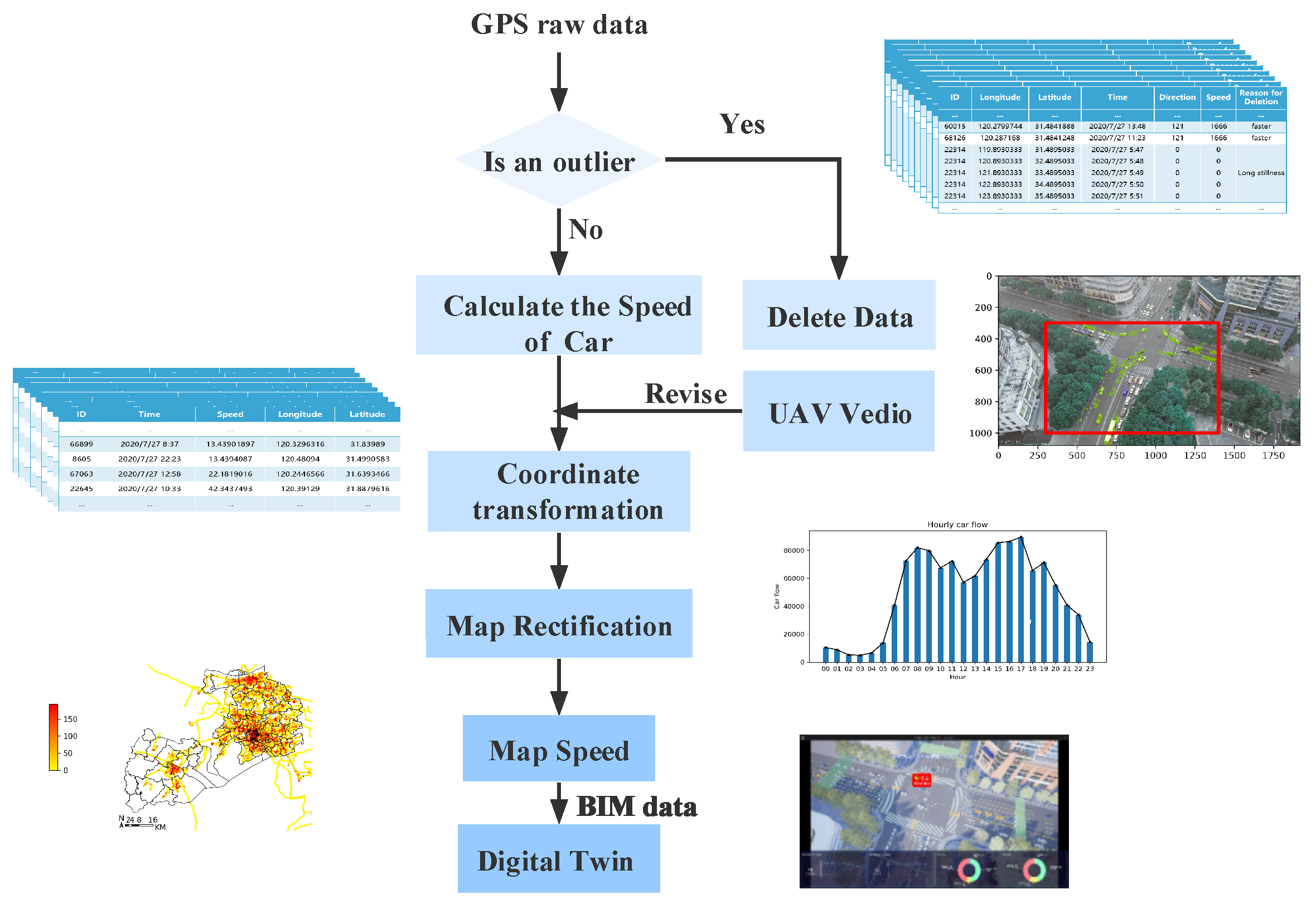
- We showed a case of collaborative analysis using digital twins spatiotemporal data, UAV videos and BIM data.
2. Digital Twin-Based ITS Multi-Source Data Cooperation Framework
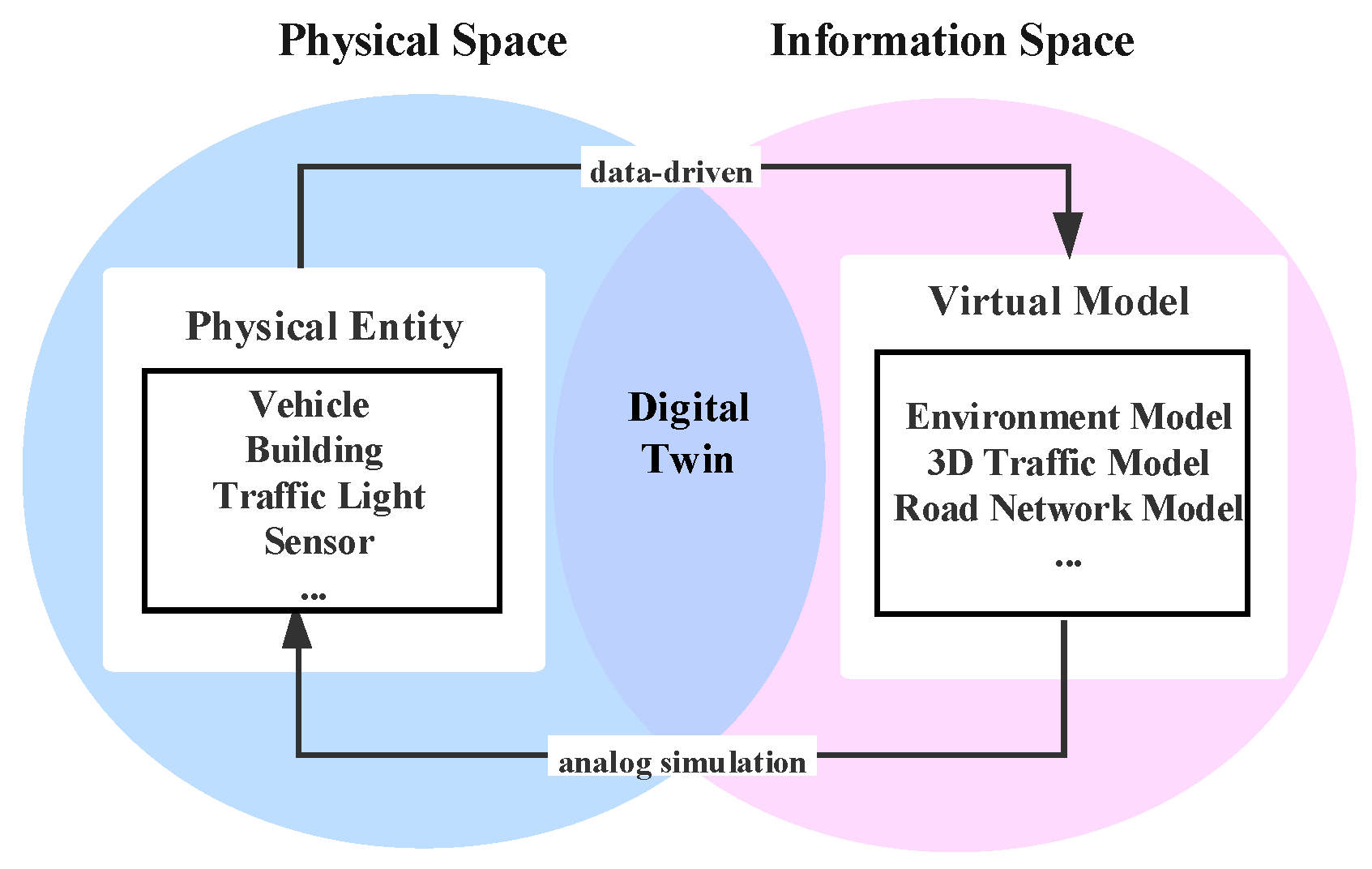
2.1. Improved Digital Twin Data Based on ITS
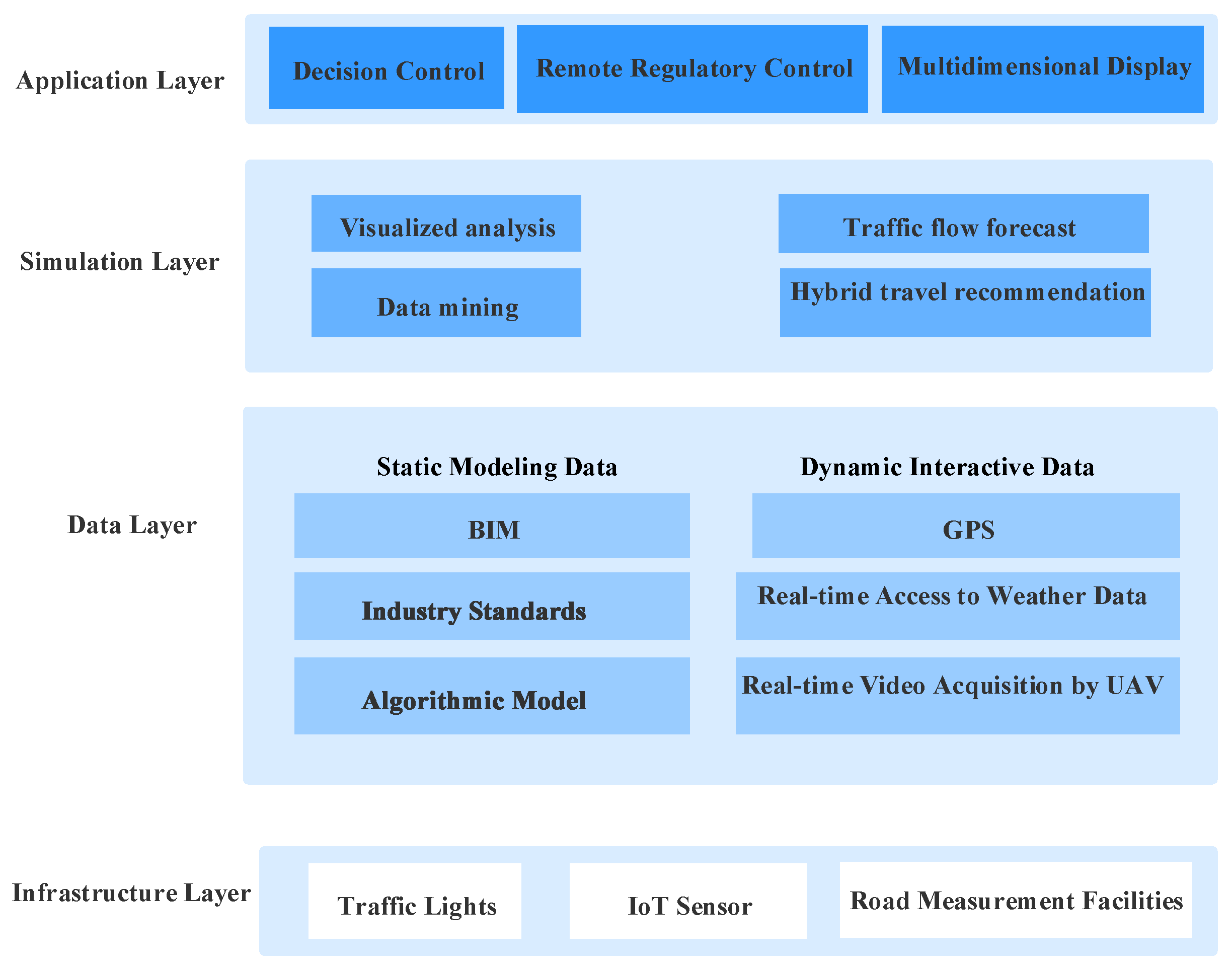
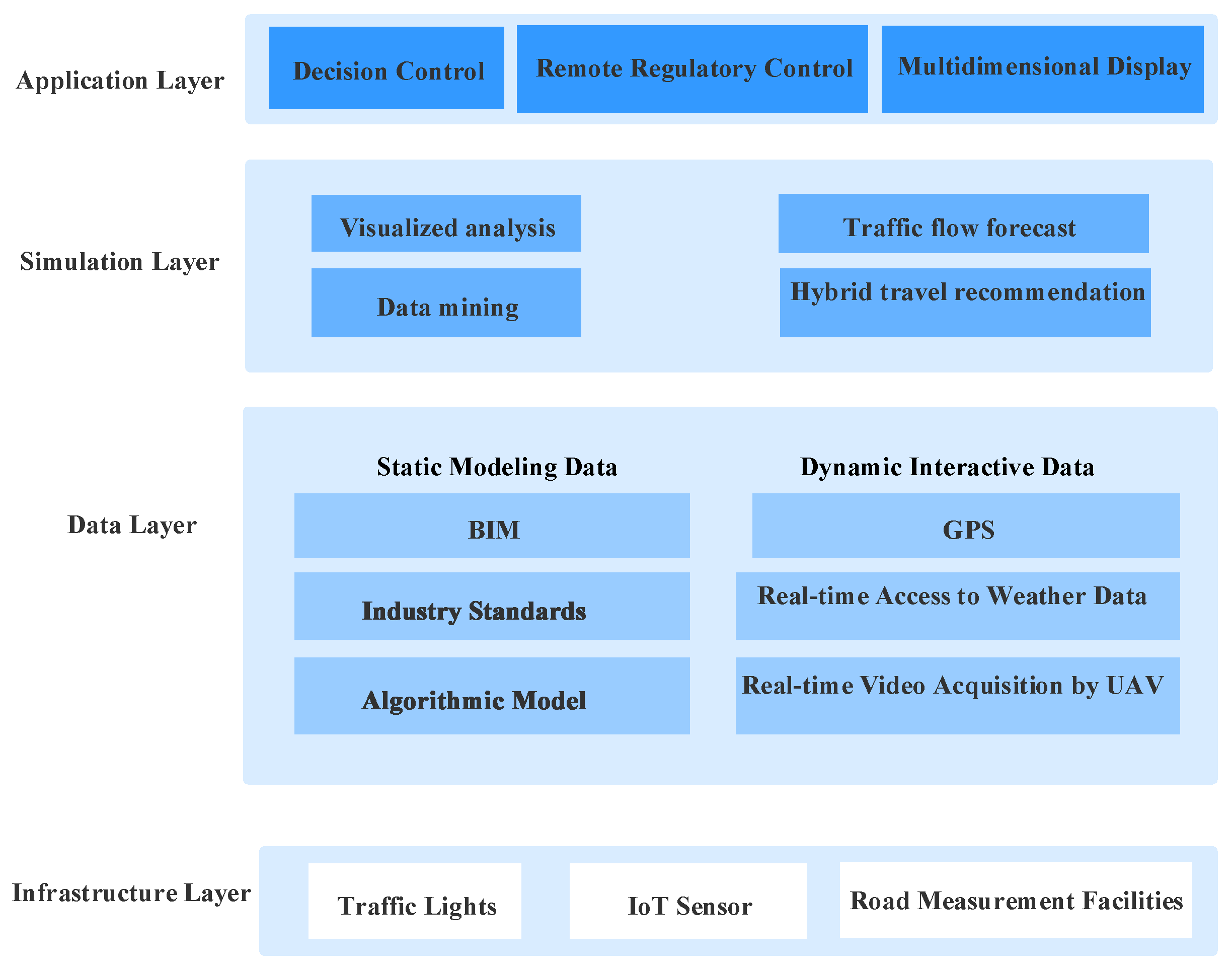
2.2. Framework Design of ITS
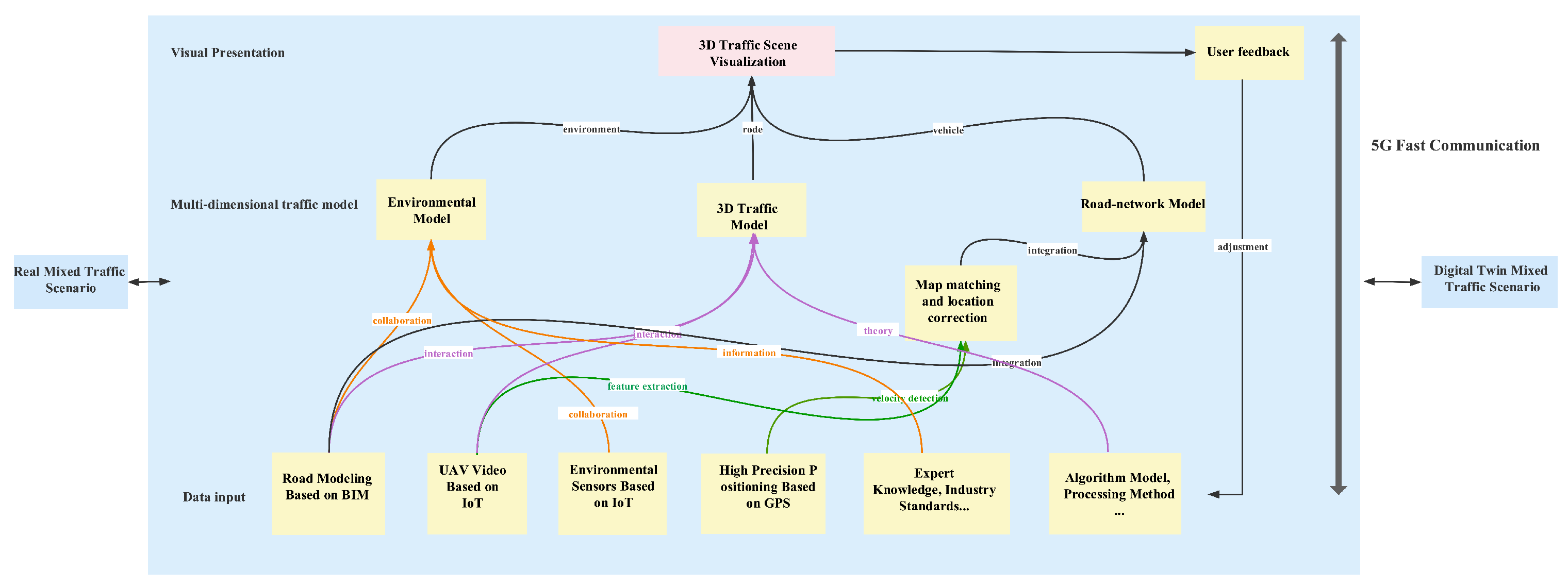
3. Design of Data Collaboration Mode Based on Improved Framework
3.1. Data Collaboration Method Based on ITS
3.1.1. Collaboration between BIM and IoT in Real-Time
3.1.2. Collaboration between BIM and UAV
3.1.3. Collaboration between GPS Information and BIM
3.1.4. Collaboration between GPS Information and UAV
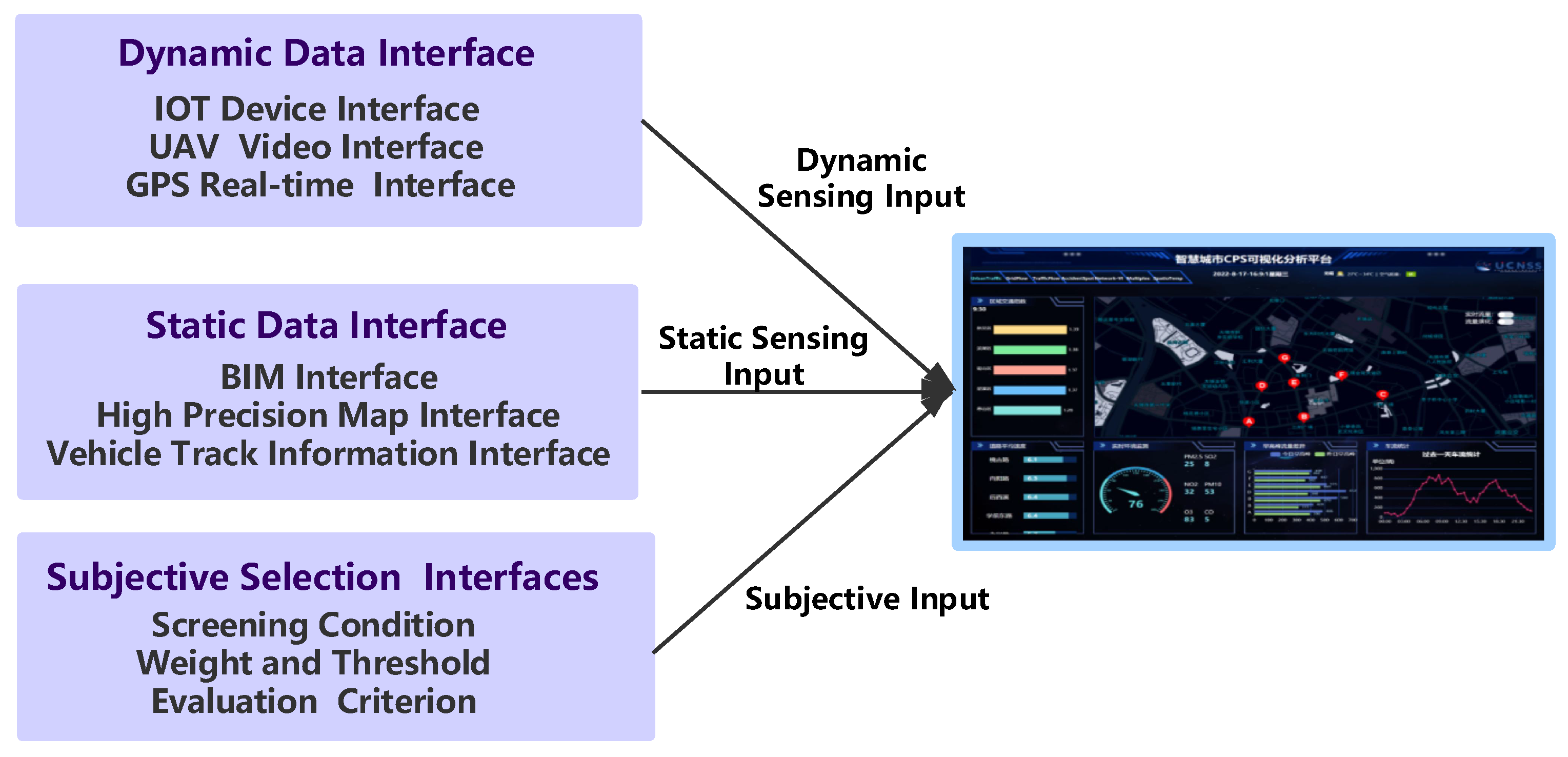
3.2. Input Interface Design Based on Data Collaboration
4. Case Study of Data Collaboration
4.1. Dataset Description
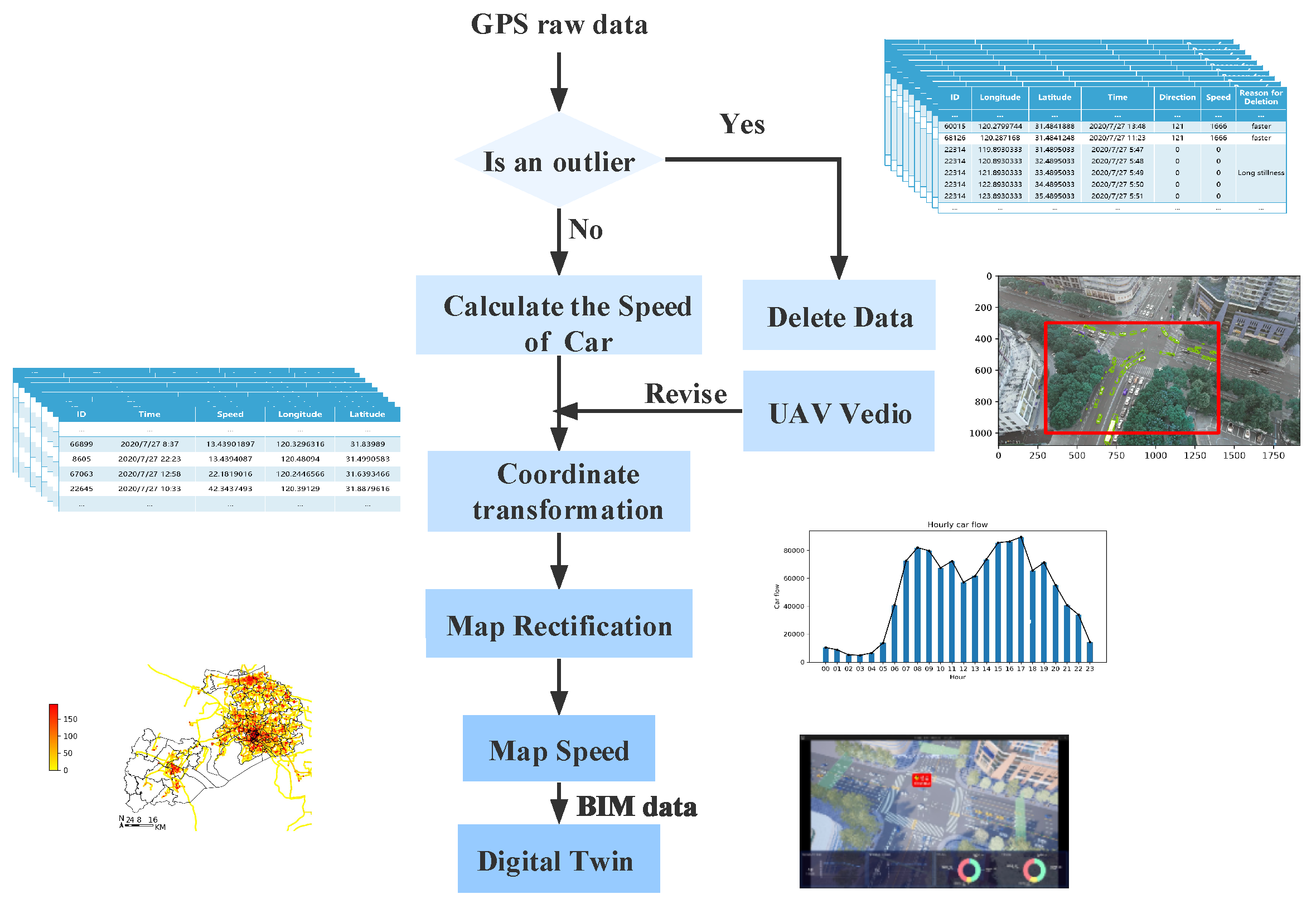
4.2. Space-Time Travel Data Mining
4.2.1. Abnormal Data Filtering
4.2.2. GPS Data Process
4.2.3. Mapping
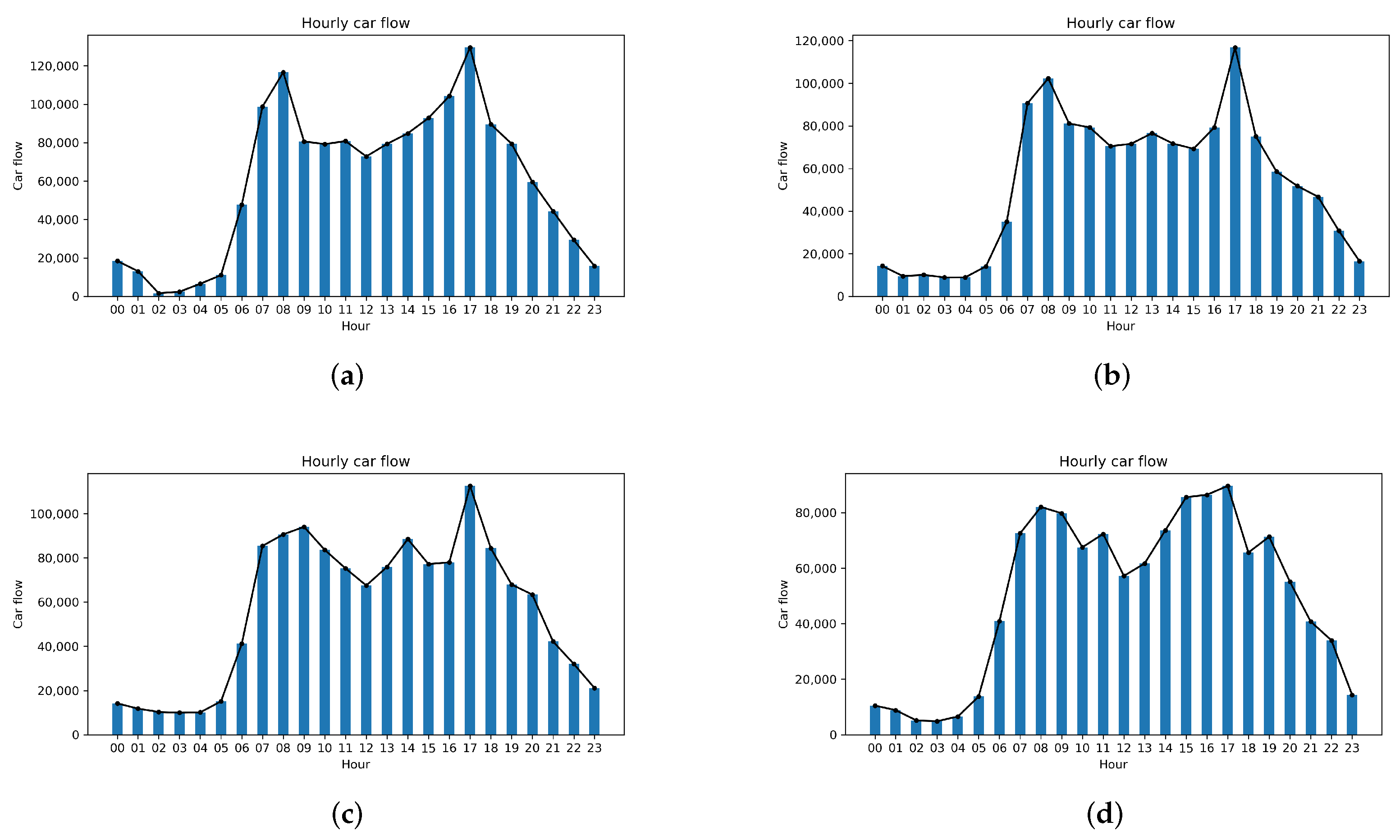
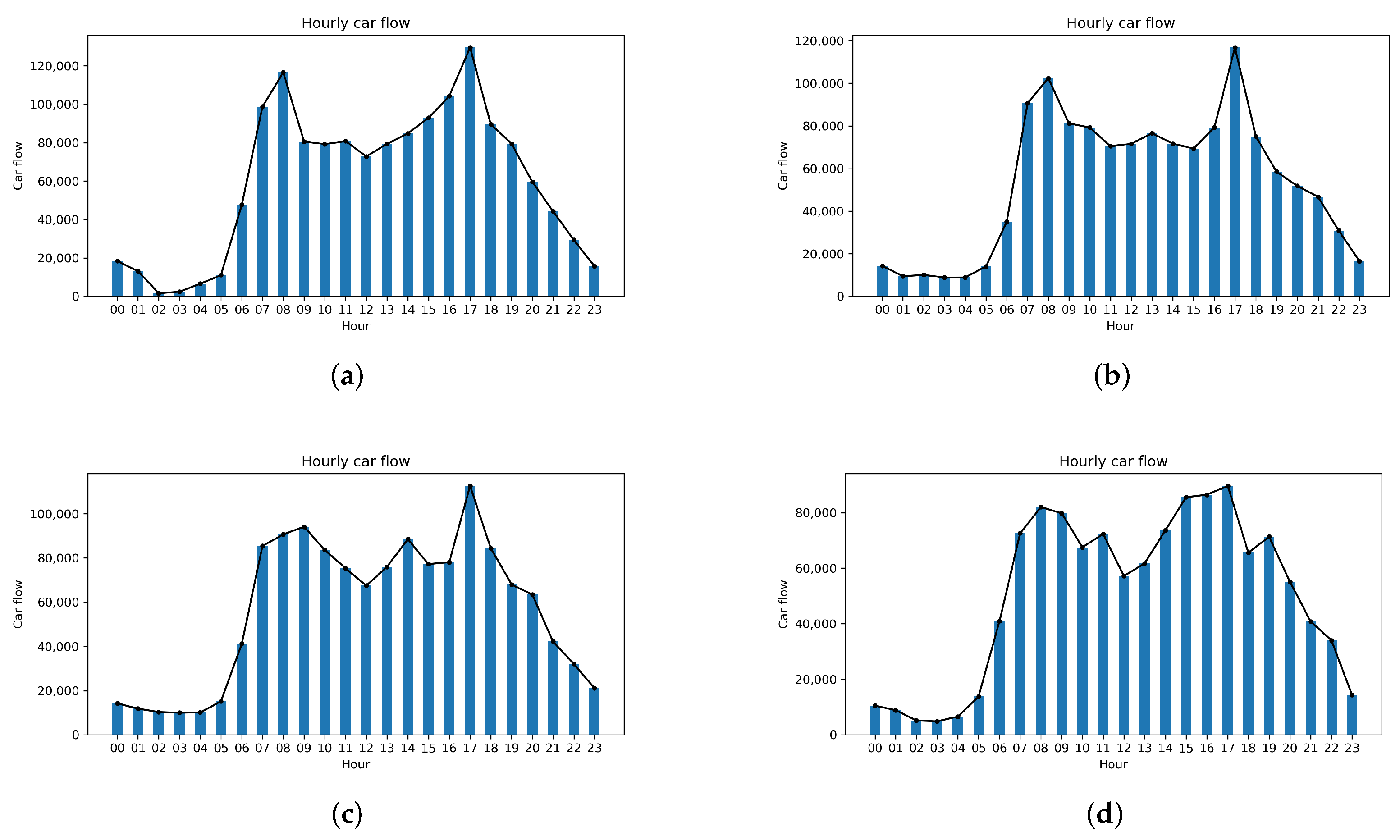
4.2.4. Time Travel Feature Mining
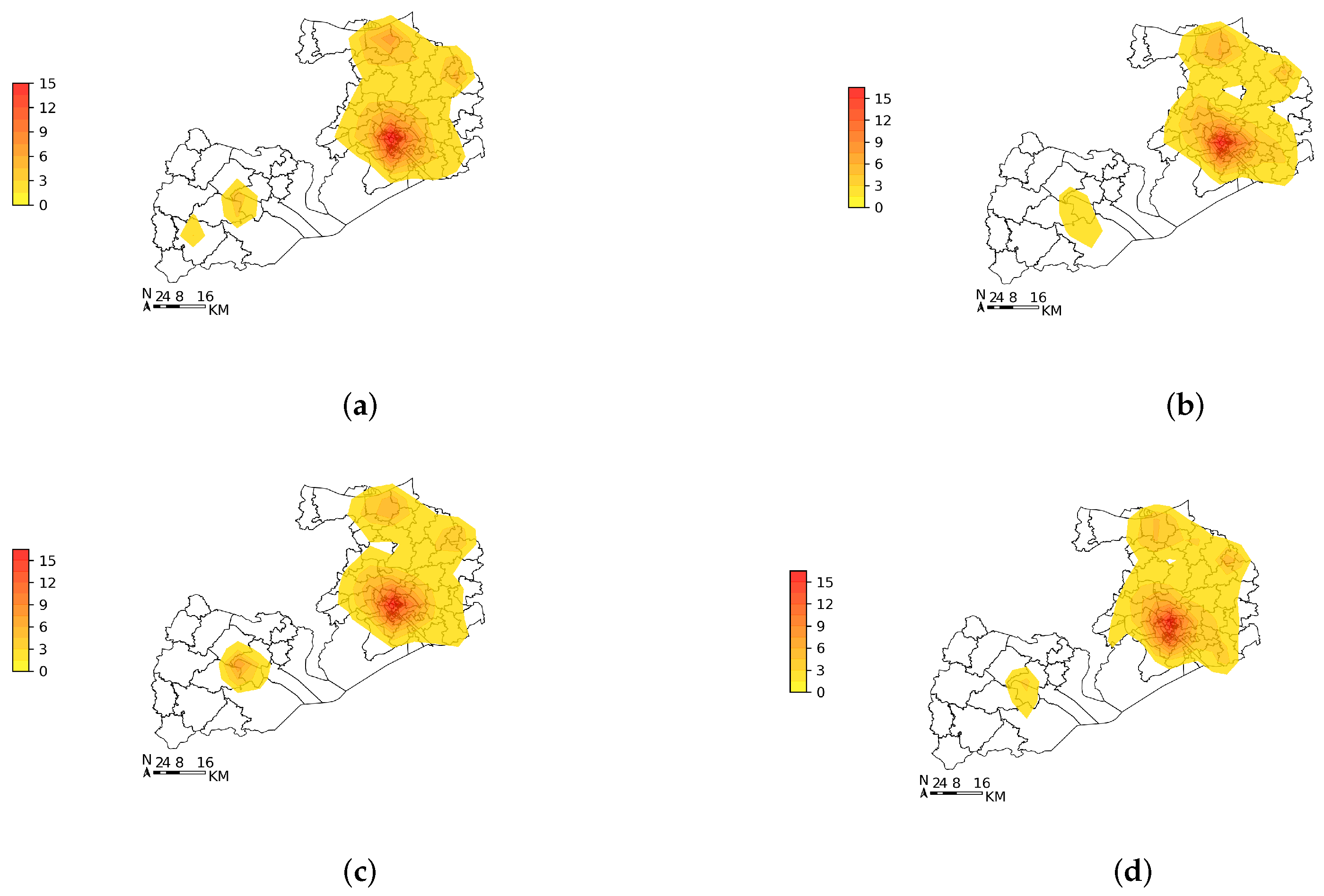
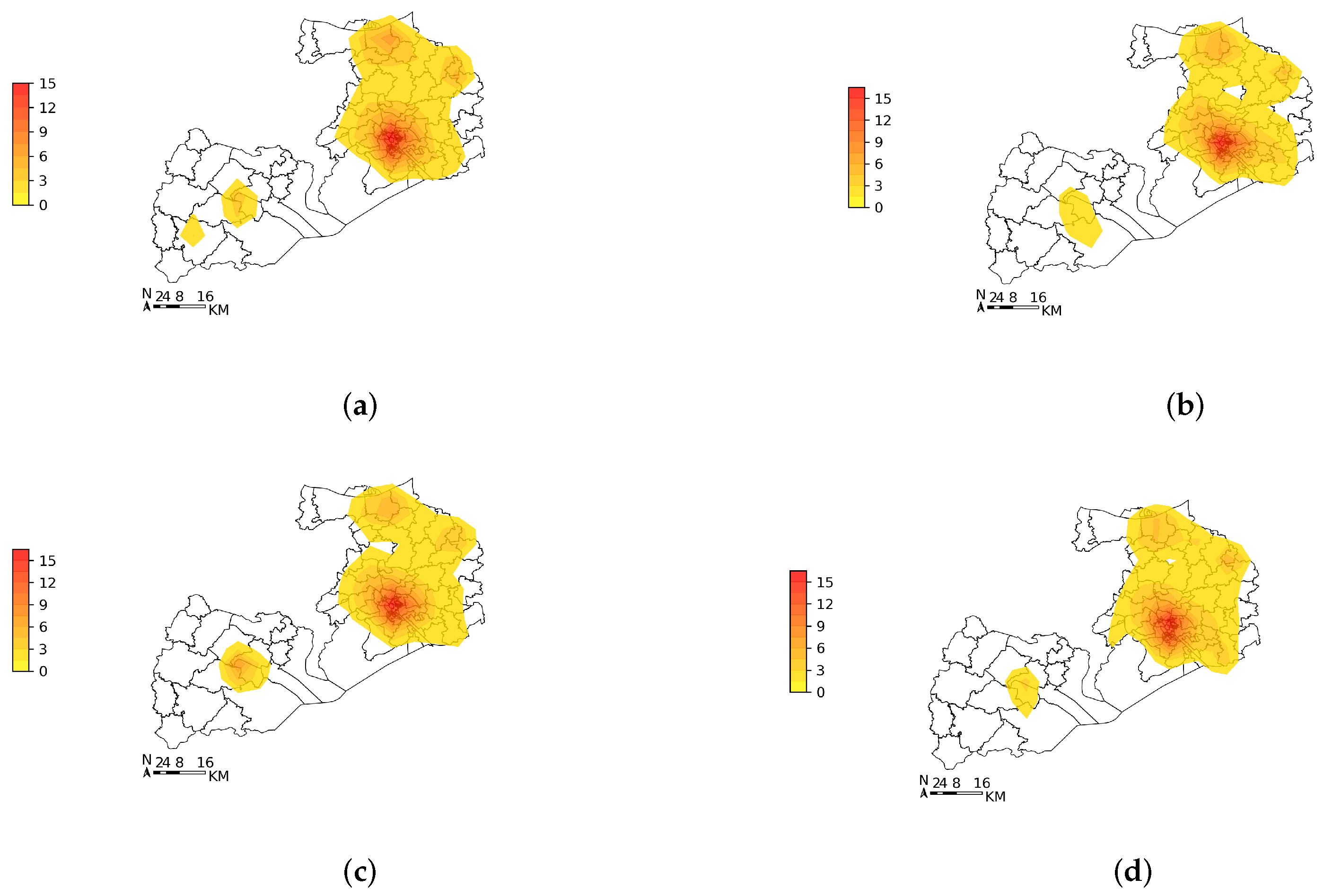
4.2.5. Spatial Travel Hotspots Mining Based on Gaussian Kernel Density Estimation
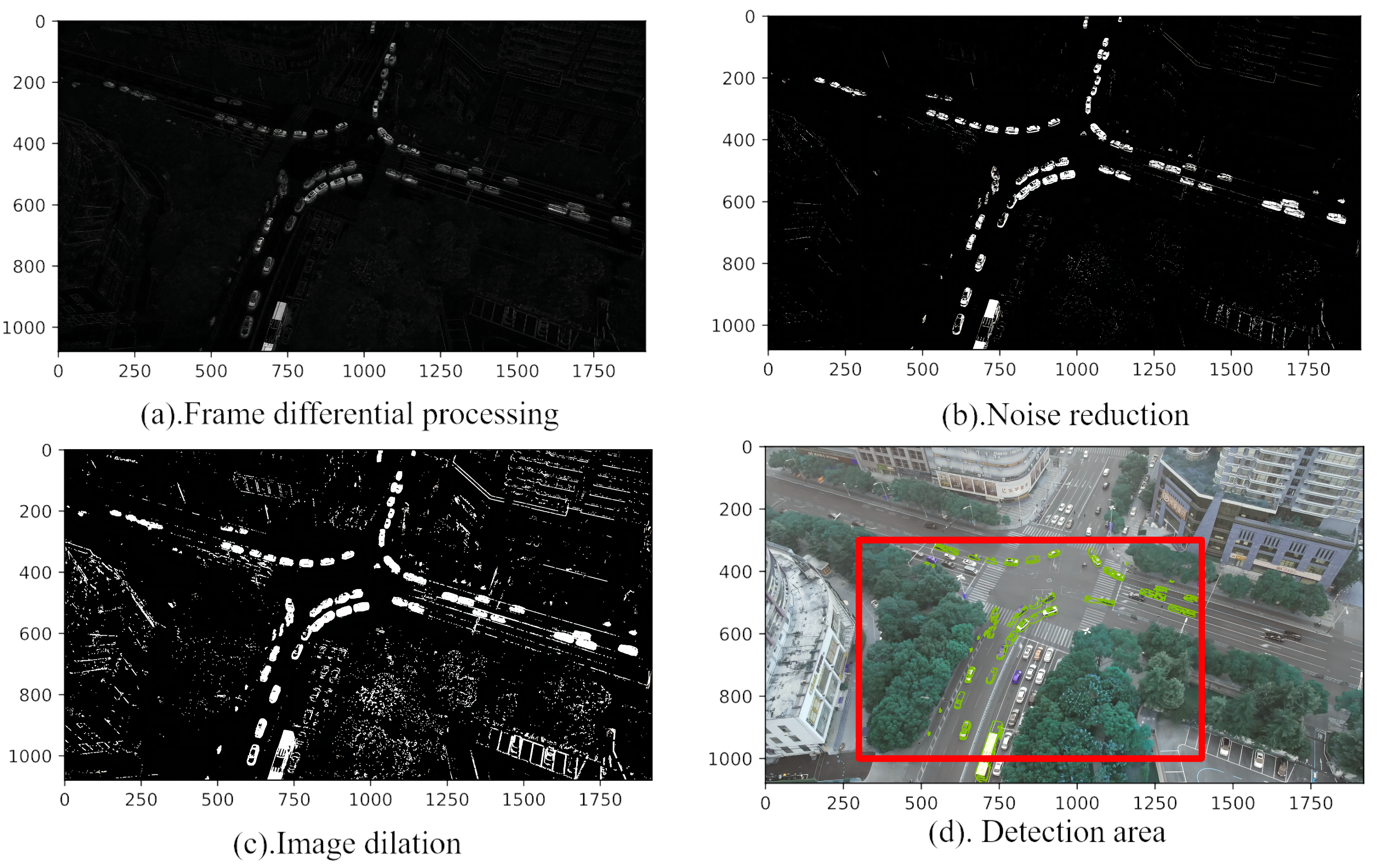
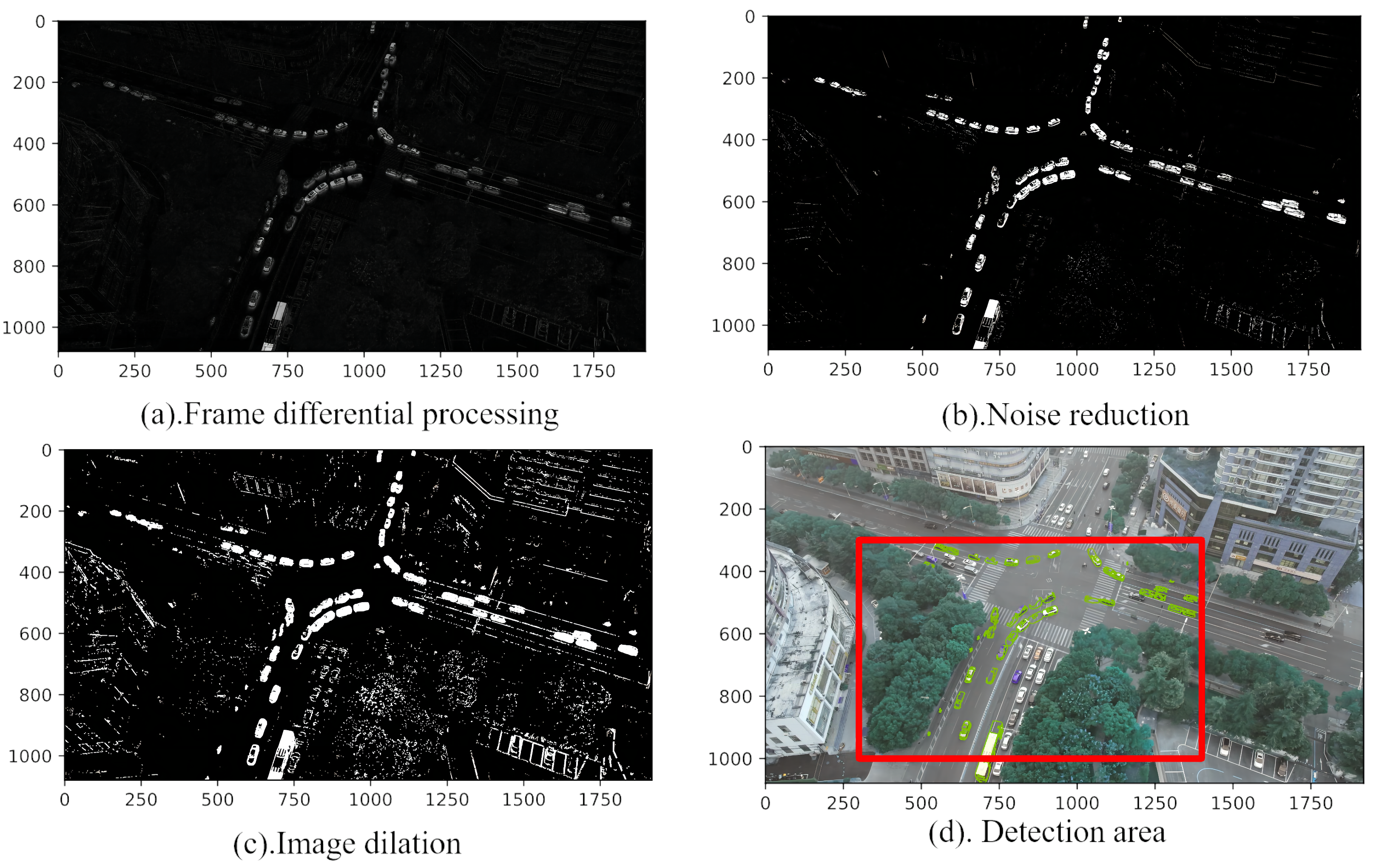
4.3. Visual Traffic Flow Detection Based on DFA
4.3.1. Differential Fusion Algorithm
4.3.2. Boundary Detection
4.3.3. Duplicate Removal Based on Similarity
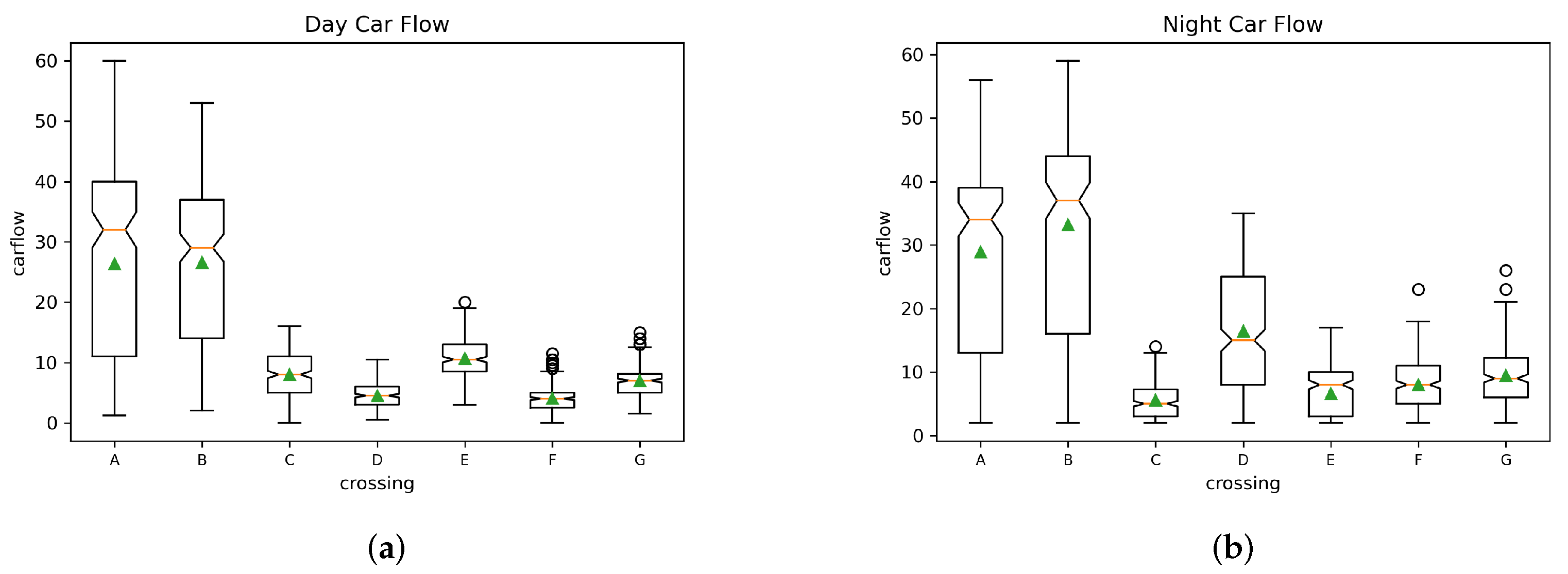
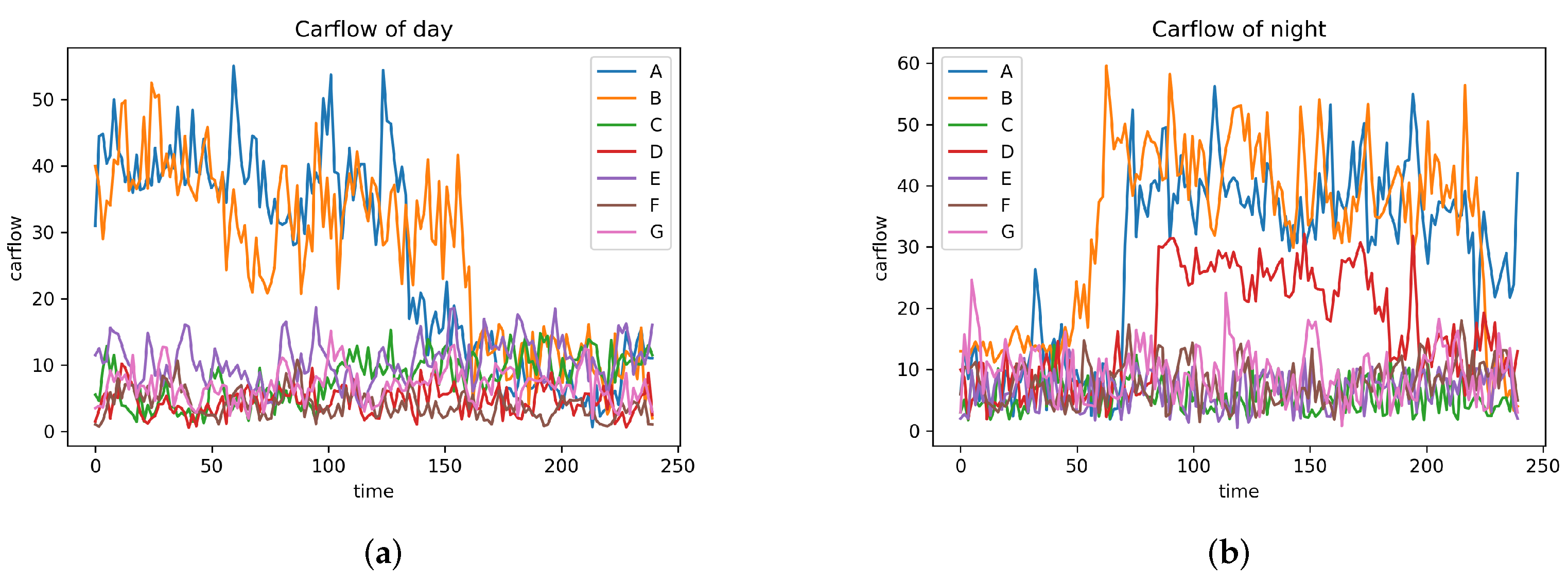
4.3.4. Traffic Flow Mining
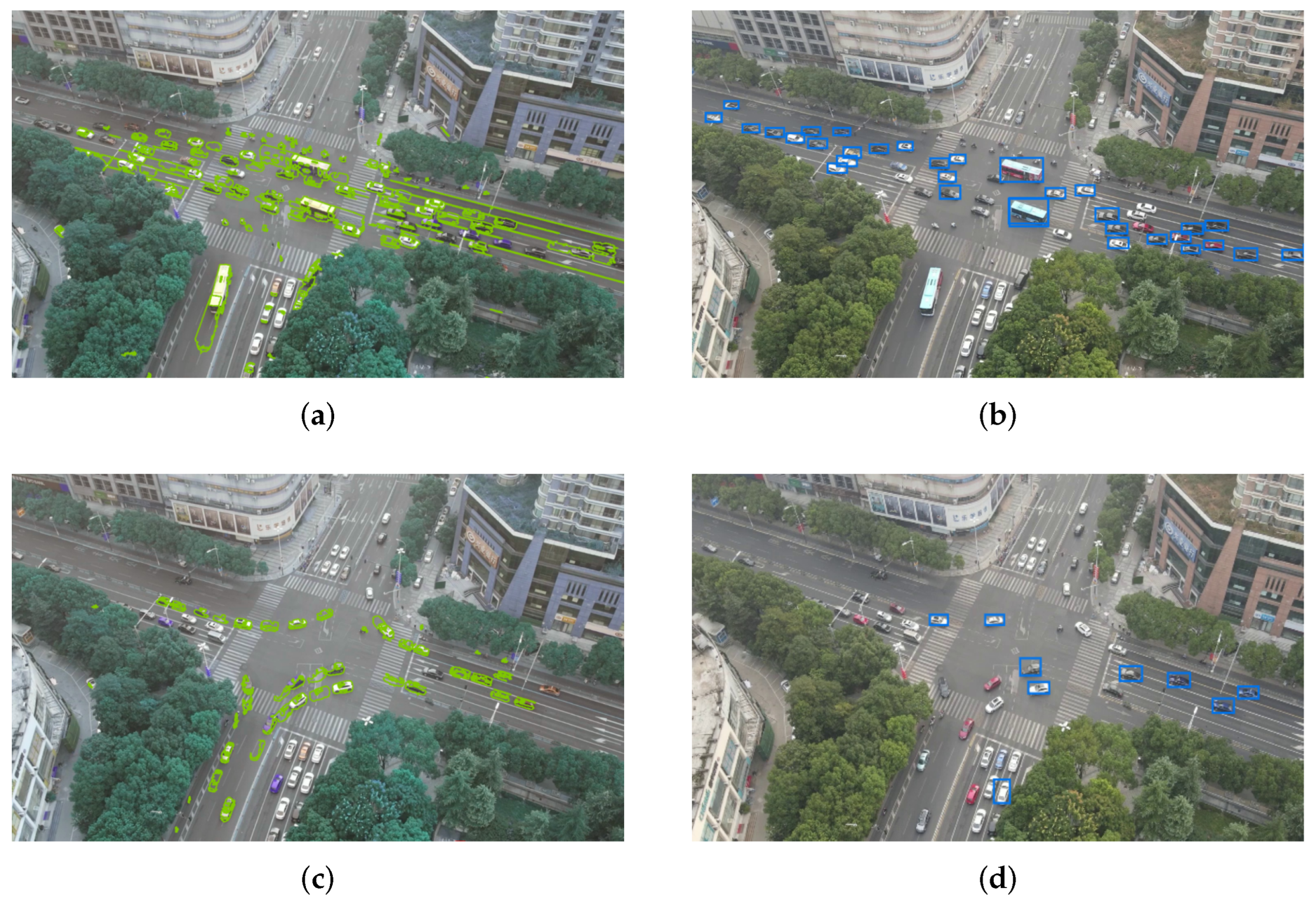
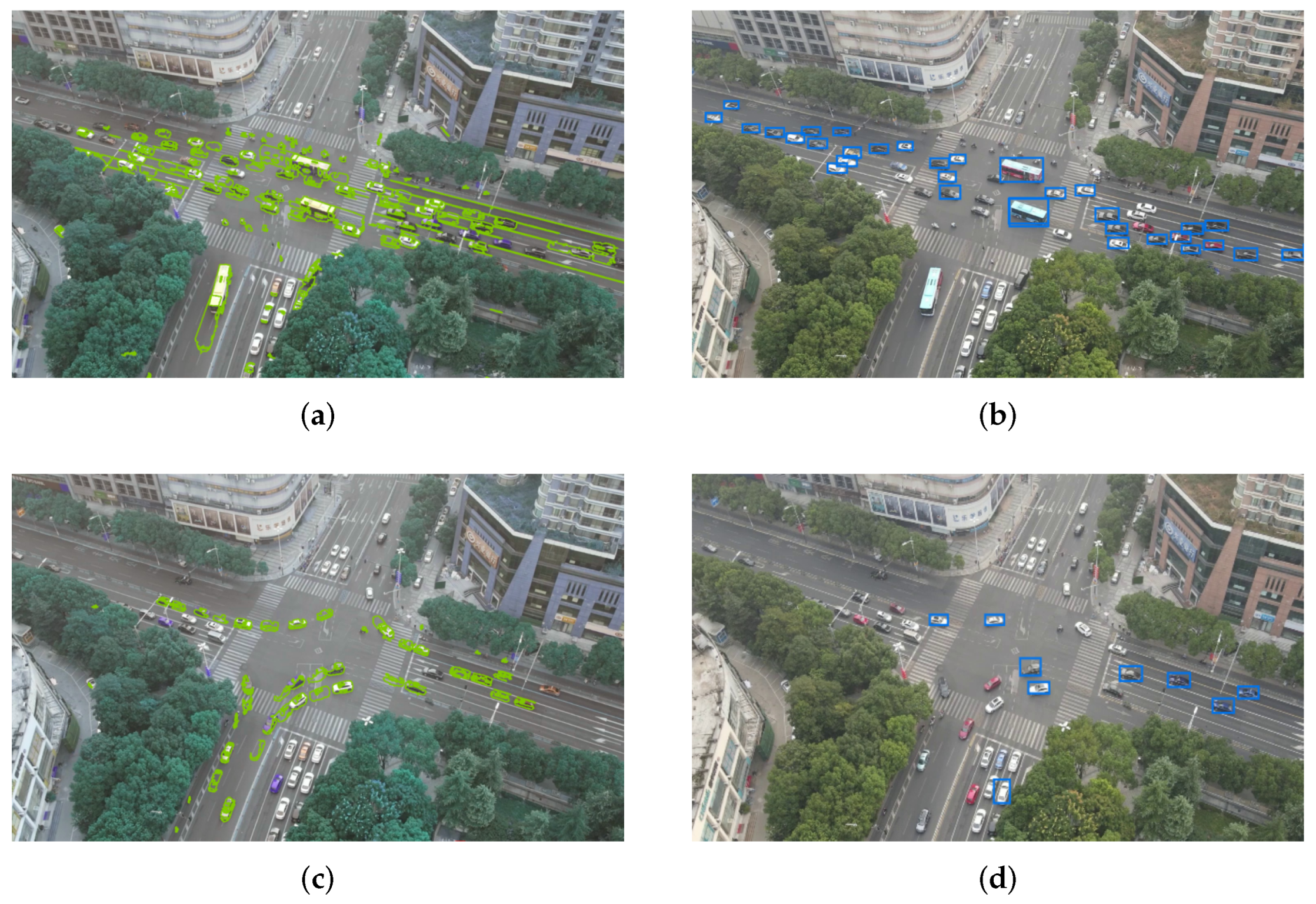
4.3.5. Target Detection Effect Comparison
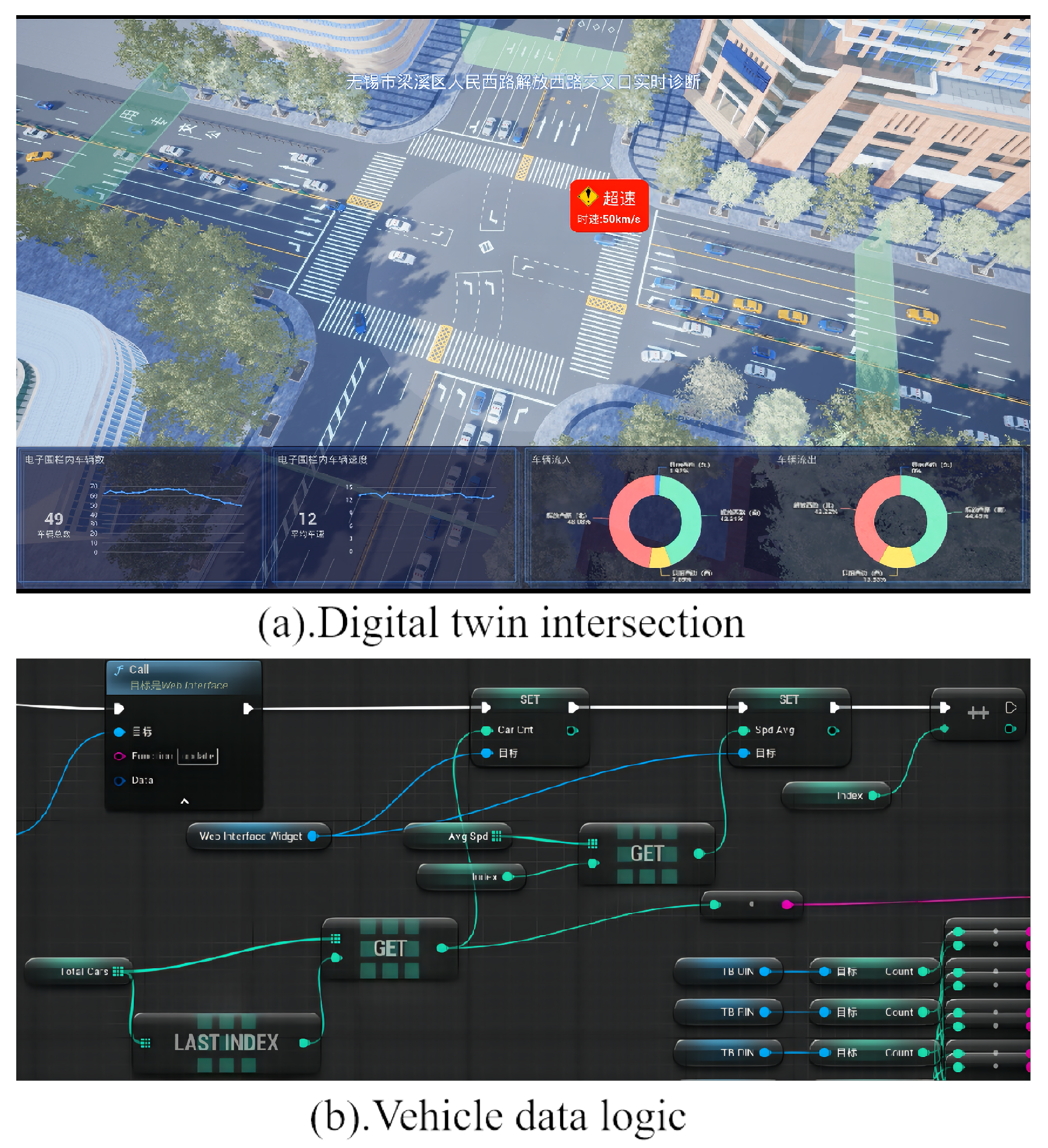
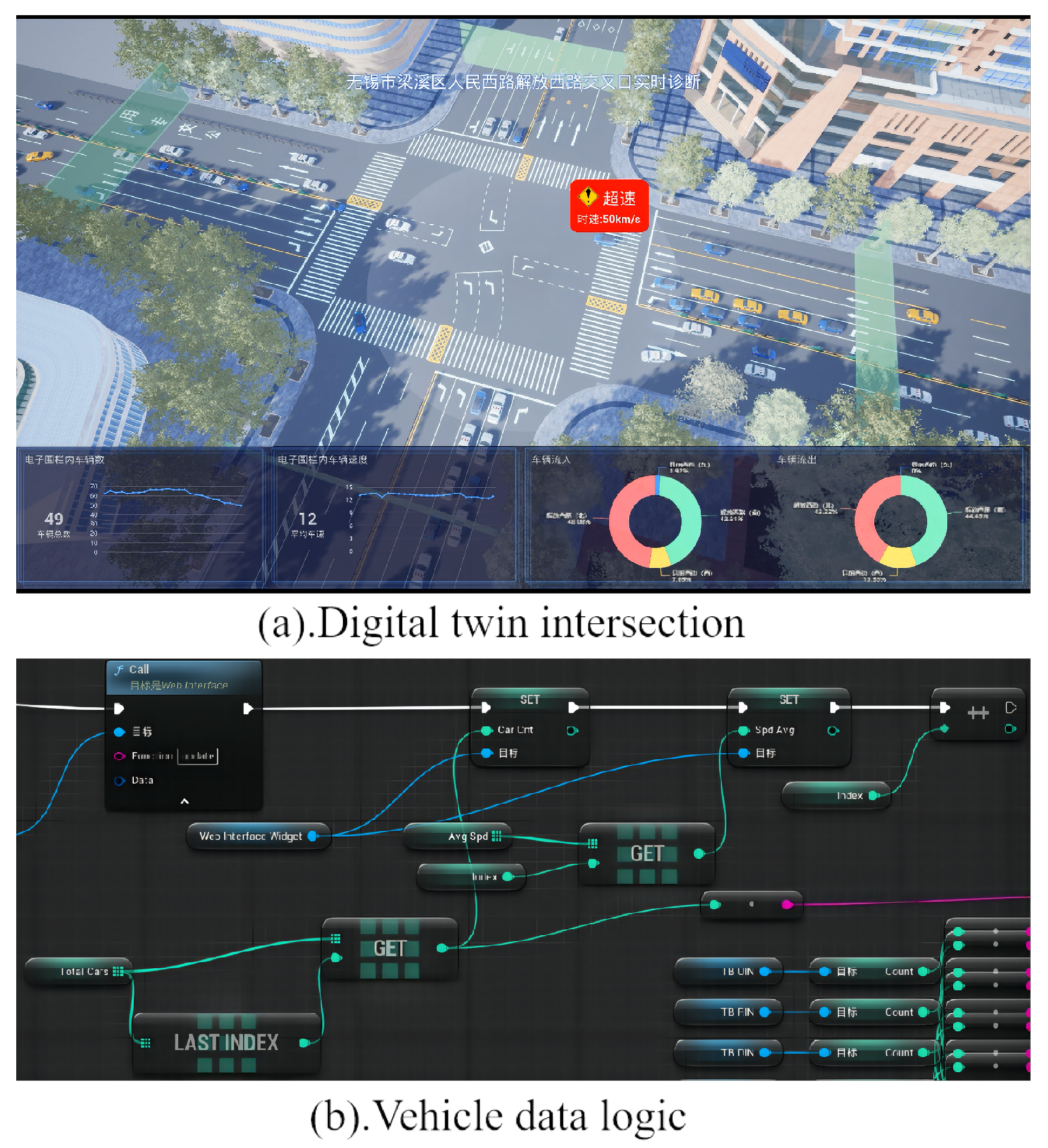
4.4. Digital Twin Visualization
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| ITS | Intelligent Transportation System |
| 3D | Three-Dimension |
| IoT | Internet of Things |
| AI | Artificial Intelligence |
| NASA | National Aeronautics and Space Administration |
| BIM | Building Information Modeling |
| UE4 | Unreal Engine 4 |
| UAV | Unmanned Aerial Vehicle |
| DFA | Differential Fusion Algorithm |
| KDE | Kernel Density Estimation |
| DCT | Discrete Cosine Transform |
| ROI | Region of Interest |
References
- Cha, H.J.; Yang, H.K.; Song, Y.J. A Study on Vehicle Monitoring Service Using Attribute-Based Security Scheme in Cyber–Physical Systems. Appl. Sci. 2022, 12, 4300. [Google Scholar] [CrossRef]
- Grieves, M.W. Product lifecycle management: The new paradigm for enterprises. Int. J. Prod. Dev. 2005, 2, 71–84. [Google Scholar] [CrossRef]
- Grieves, M. Virtually Perfect: Driving Innovative and Lean Products through Product Lifecycle Management; Space Coast Press: Melbourne, FL, USA, 2011. [Google Scholar]
- Grieves, M.; Vickers, J. Digital twin: Mitigating unpredictable, undesirable emergent behavior in complex systems. In Transdisciplinary Perspectives on Complex Systems; Springer: Berlin/Heidelberg, Germany, 2017; pp. 85–113. [Google Scholar]
- Redelinghuys, A.; Basson, A.H.; Kruger, K. A six-layer architecture for the digital twin: A manufacturing case study implementation. J. Intell. Manuf. 2019, 31, 1383–1402. [Google Scholar] [CrossRef]
- Tao, F.; Liu, W.; Zhang, M.; Hu, T.; Qi, Q.; Zhang, H.; Sui, F.; Wang, T.; Xu, H.; Huang, Z.; et al. Five-dimension digital twin model and its ten applications. Comput. Integr. Manuf. Syst. 2019, 25, 1–18. [Google Scholar]
- Wu, C.; Zhou, Y.; Pessôa, M.V.P.; Peng, Q.; Tan, R. Conceptual digital twin modeling based on an integrated five-dimensional framework and TRIZ function model. J. Manuf. Syst. 2021, 58, 79–93. [Google Scholar] [CrossRef]
- Yiu, C.Y.; Ng, K.K.; Lee, C.H.; Chow, C.T.; Chan, T.C.; Li, K.C.; Wong, K.Y. A digital twin-based platform towards intelligent automation with virtual counterparts of flight and air traffic control operations. Appl. Sci. 2021, 11, 10923. [Google Scholar] [CrossRef]
- Tao, F.; Zhang, H.; Liu, A.; Nee, A.Y. Digital twin in industry: State-of-the-art. IEEE Trans. Ind. Inform. 2018, 15, 2405–2415. [Google Scholar] [CrossRef]
- JIANG, H.; DING, G.; ZHANG, J. Evolution and Operation Mechanism of Digital Twin Shopfloors. China Mech. Eng. 2020, 31, 824. [Google Scholar]
- Cheng, J.; Zhang, H.; Tao, F.; Juang, C.F. DT-II: Digital twin enhanced Industrial Internet reference framework towards smart manufacturing. Robot. Comput.-Integr. Manuf. 2020, 62, 101881. [Google Scholar] [CrossRef]
- Negri, E.; Fumagalli, L.; Macchi, M. A review of the roles of digital twin in CPS-based production systems. Procedia Manuf. 2017, 11, 939–948. [Google Scholar] [CrossRef]
- Levina, A.I.; Dubgorn, A.S.; Iliashenko, O.Y. Internet of things within the service architecture of intelligent transport systems. In Proceedings of the 2017 European Conference on Electrical Engineering and Computer Science (EECS), Bern, Switzerland, 17–19 November 2017; pp. 351–355. [Google Scholar]
- Kaewunruen, S.; Rungskunroch, P.; Welsh, J. A digital-twin evaluation of net zero energy building for existing buildings. Sustainability 2019, 11, 159. [Google Scholar] [CrossRef]
- Delbrügger, T.; Lenz, L.T.; Losch, D.; Roßmann, J. A navigation framework for digital twins of factories based on building information modeling. In Proceedings of the 2017 22nd IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Limassol, Cyprus, 12–15 September 2017; pp. 1–4. [Google Scholar]
- Pan, B.; Zheng, Y.; Wilkie, D.; Shahabi, C. Crowd sensing of traffic anomalies based on human mobility and social media. In Proceedings of the 21st ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Orlando, FL, USA, 5–8 November 2013; pp. 344–353. [Google Scholar]
- Guo, Y.; Li, B.; Lu, Z.; Zhou, J. A novel method for road network mining from floating car data. Geo-Spat. Inf. Sci. 2021, 25, 197–211. [Google Scholar] [CrossRef]
- Magsino, E.R. Investigating the operational dynamics of different transportation modes in vehicular networks. In Proceedings of the 2021 International Conference on Information Technology (ICIT), Amman, Jordan, 14–15 July 2021; pp. 246–250. [Google Scholar]
- Felemban, E.; Ur Rehman, F. An Interactive Analysis Platform for Bus Movement: A Case Study of One of the World’s Largest Annual Gathering. In IoT for Sustainable Smart Cities and Society; Springer: Berlin/Heidelberg, Germany, 2022; pp. 125–143. [Google Scholar]
- Wang, S.; Niu, X.; Fournier-Viger, P.; Zhou, D.; Min, F. A graph based approach for mining significant places in trajectory data. Inf. Sci. 2022, 609, 172–194. [Google Scholar] [CrossRef]
- Chen, C.; Ma, J.; Susilo, Y.; Liu, Y.; Wang, M. The promises of big data and small data for travel behavior (aka human mobility) analysis. Transp. Res. Part C Emerg. Technol. 2016, 68, 285–299. [Google Scholar] [CrossRef]
- Wang, Y.; Zheng, Y.; Liu, T. A noise map of New York city. In Proceedings of the 2014 ACM International Joint Conference on Pervasive and Ubiquitous Computing: Adjunct Publication, Seattle, WA, USA, 13–17 September 2014; pp. 275–278. [Google Scholar]
- Yuan, J.; Zheng, Y.; Zhang, C.; Xie, W.; Xie, X.; Sun, G.; Huang, Y. T-drive: Driving directions based on taxi trajectories. In Proceedings of the 18th SIGSPATIAL International Conference on Advances in Geographic Information Systems, San Jose, CA, USA, 2–5 November 2010; pp. 99–108. [Google Scholar]
- Zheng, Y.; Liu, F.; Hsieh, H.P. U-air: When urban air quality inference meets big data. In Proceedings of the 19th ACM SIGKDD international Conference on Knowledge Discovery and Data Mining, Chicago, IL, USA, 11–14 August 2013; pp. 1436–1444. [Google Scholar]
- Rudskoy, A.; Ilin, I.; Prokhorov, A. Digital Twins in the Intelligent Transport Systems. Transp. Res. Procedia 2021, 54, 927–935. [Google Scholar] [CrossRef]
- Ugurlu, D.; Sertyesilisik, B. Usage of BIM in Smart Cities. Int. J. Digit. Innov. Built Environ. (IJDIBE) 2019, 8, 17–27. [Google Scholar] [CrossRef]
- Naidu, D.S. GIS Applications to Smart Cities. Int. J. Adv. Multidiscip. Sci. Res. (IJAMSR) 2018, 1, 2. [Google Scholar]
- Datta, P.; Sharma, B. A survey on IoT architectures, protocols, security and smart city based applications. In Proceedings of the 2017 8th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Delhi, India, 3–5 July 2017; pp. 1–5. [Google Scholar]
- Jeong, S.; Simeone, O.; Kang, J. Mobile edge computing via a UAV-mounted cloudlet: Optimization of bit allocation and path planning. IEEE Trans. Veh. Technol. 2017, 67, 2049–2063. [Google Scholar] [CrossRef]
- Figueiredo, K.; Pierott, R.; Hammad, A.W.; Haddad, A. Sustainable material choice for construction projects: A life cycle sustainability assessment framework based on BIM and Fuzzy-AHP. Build. Environ. 2021, 196, 107805. [Google Scholar] [CrossRef]
- Alizadehsalehi, S.; Yitmen, I.; Celik, T.; Arditi, D. The effectiveness of an integrated BIM/UAV model in managing safety on construction sites. Int. J. Occup. Saf. Ergon. 2020, 26, 829–844. [Google Scholar] [CrossRef]
- Shenoy, J.; Pingle, Y. IOT in agriculture. In Proceedings of the 2016 3rd International Conference on Computing for Sustainable Global Development (INDIACom), New Delhi, India, 16–18 March 2016; pp. 1456–1458. [Google Scholar]
- Wang, Z.; Lu, M.; Yuan, X.; Zhang, J.; Van De Wetering, H. Visual traffic jam analysis based on trajectory data. IEEE Trans. Vis. Comput. Graph. 2013, 19, 2159–2168. [Google Scholar] [CrossRef] [PubMed]
- Suzuki, S. Topological structural analysis of digitized binary images by border following. Comput. Vision Graph. Image Process. 1985, 30, 32–46. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| CityNoise [22] | T-Drive [23] | U-Air [24] | E. Felemban [19] | Taos’ [6] | Ours | |
|---|---|---|---|---|---|---|
| √ | √ | √ | √ | √ | √ | |
| √ | √ | √ | ||||
| √ | √ | √ | √ | |||
| √ | √ | √ | √ | √ | √ | |
| √ | √ | |||||
| √ |
| Id | Longitude | Latitude | Time | Direction | Speed | Reason for Deletion |
|---|---|---|---|---|---|---|
| … | … | … | … | … | … | … |
| 60015 | 120.2799744 | 31.4841888 | 27 July 2020 13:48 | 121 | 1666 | faster |
| 68126 | 120.287168 | 31.4841248 | 27 July 2020 11:23 | 121 | 1666 | faster |
| 22314 | 119.8930333 | 31.4895033 | 27 July 2020 05:47 | 0 | 0 | |
| 22314 | 120.8930333 | 32.4895033 | 27 July 2020 05:48 | 0 | 0 | |
| 22314 | 121.8930333 | 33.4895033 | 27 July 2020 05:49 | 0 | 0 | Long stillness |
| 22314 | 122.8930333 | 34.4895033 | 27 July 2020 05:50 | 0 | 0 | |
| 22314 | 123.8930333 | 35.4895033 | 27 July 2020 05:51 | 0 | 0 | |
| … | … | … | … | … | … | … |
| Id | Time | Car Speed | Longitude | Latitude |
|---|---|---|---|---|
| … | … | … | … | … |
| 66899 | 27 July 2020 8:37 | 13.43901897 | 120.3296316 | 31.83989 |
| 22645 | 27 July 2020 10:33 | 42.3437493 | 120.39129 | 31.8879616 |
| 67063 | 27 July 2020 12:58 | 22.1819016 | 120.2446566 | 31.6393466 |
| 08605 | 27 July 2020 22:23 | 13.4394087 | 120.48094 | 31.4990583 |
| … | … | … | … | … |
| Method | Accuracy | Time |
|---|---|---|
| DFA | 95.26% | 0.55 s |
| yolov2 | 78.43% | 0.41 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Han, D.; Zhang, X.; Fang, L. Design and Application of Intelligent Transportation Multi-Source Data Collaboration Framework Based on Digital Twins. Appl. Sci. 2023, 13, 1923. https://doi.org/10.3390/app13031923
Zhang X, Han D, Zhang X, Fang L. Design and Application of Intelligent Transportation Multi-Source Data Collaboration Framework Based on Digital Twins. Applied Sciences. 2023; 13(3):1923. https://doi.org/10.3390/app13031923
Chicago/Turabian StyleZhang, Xihou, Dingding Han, Xiaobo Zhang, and Leheng Fang. 2023. "Design and Application of Intelligent Transportation Multi-Source Data Collaboration Framework Based on Digital Twins" Applied Sciences 13, no. 3: 1923. https://doi.org/10.3390/app13031923
APA StyleZhang, X., Han, D., Zhang, X., & Fang, L. (2023). Design and Application of Intelligent Transportation Multi-Source Data Collaboration Framework Based on Digital Twins. Applied Sciences, 13(3), 1923. https://doi.org/10.3390/app13031923