
Structural Health Monitoring of Underground Metro Tunnel by Identifying Damage Using ANN Deep Learning Auto-Encoder
 ,
,  , , and
, , and
Abstract
1. Introduction
2. Methodology
2.1. Deep Auto Encoder-Based Damage Identification Technique
2.2. Deep Auto Encoder
2.3. Projected Framework
2.4. Damage Localization Using RMS Deviation
2.5. Investigation of the Feasibility of Proposed Approach on Simply Supported Beam
2.6. Numerical Simulation and Results Analysis on Underground Tunnel Structure
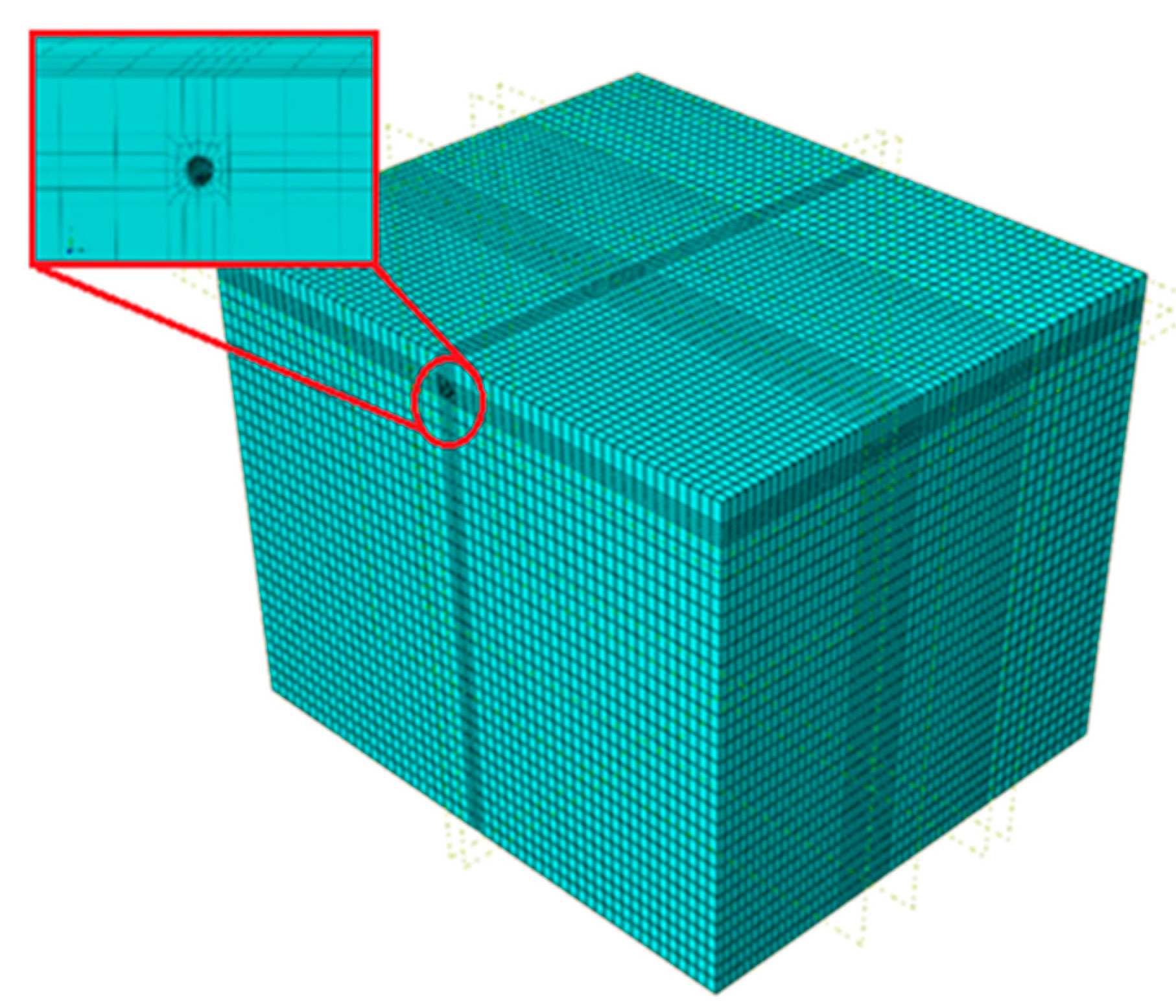
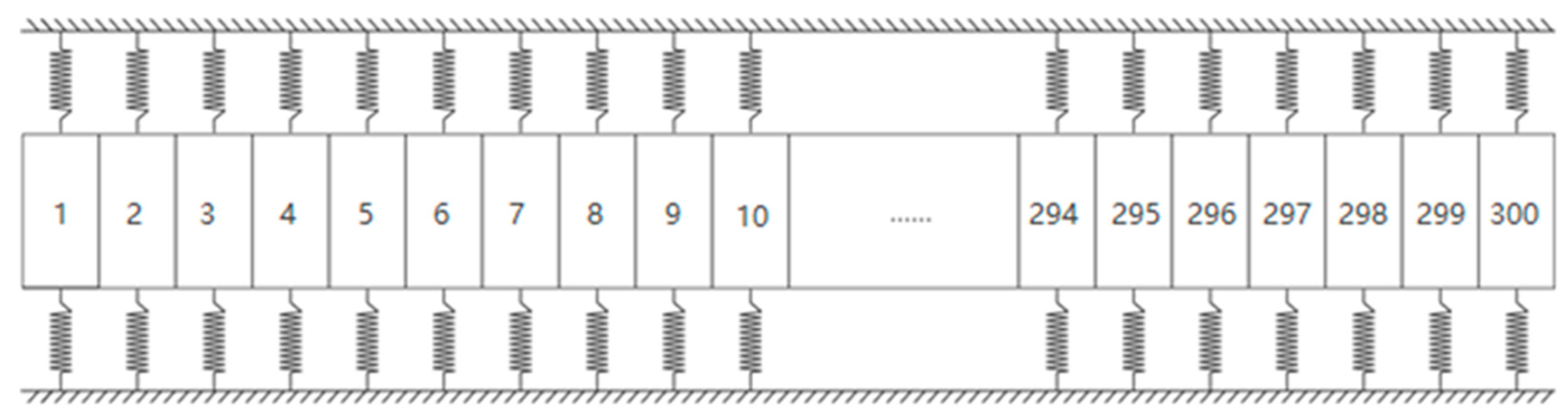
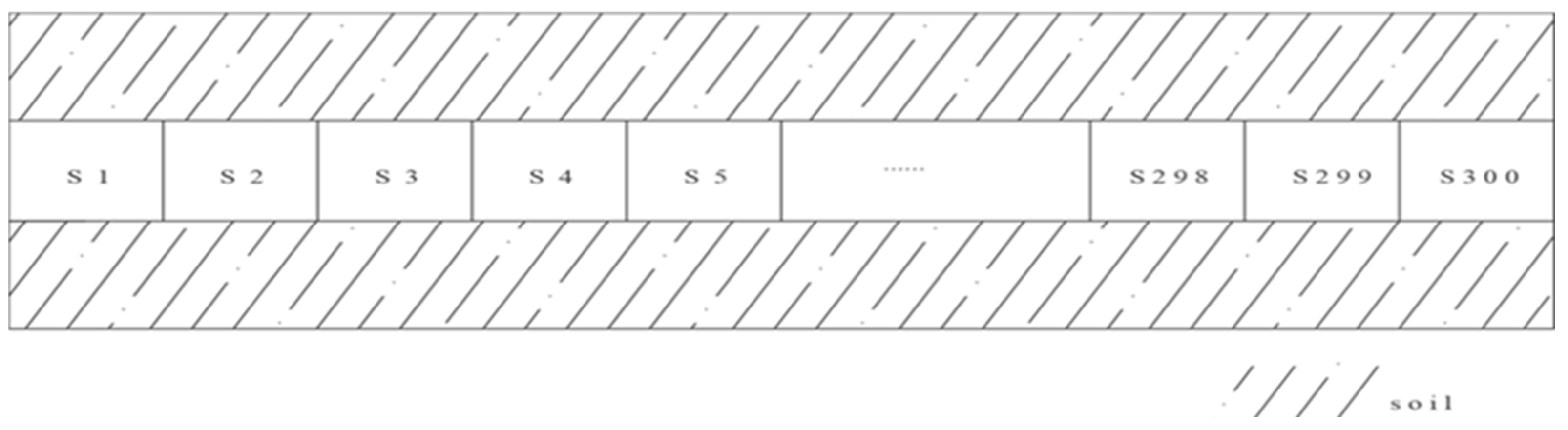
2.7. Description of Finite Element Model
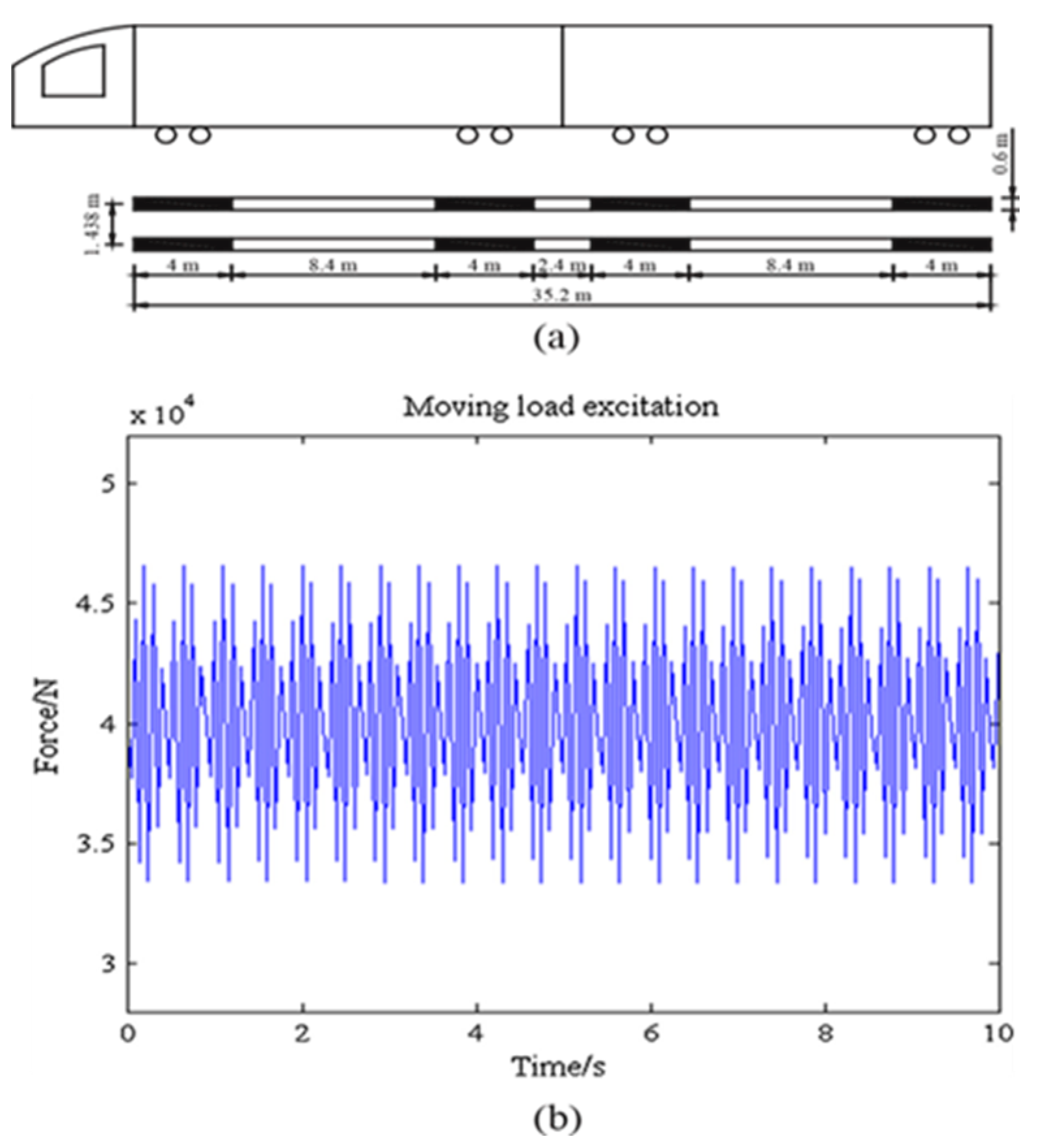
2.8. Moving Load
3. Results
3.1. Measurement Points Used on Metro Tunnel Model
3.2. Confusion Matrix Results for the Proposed Method
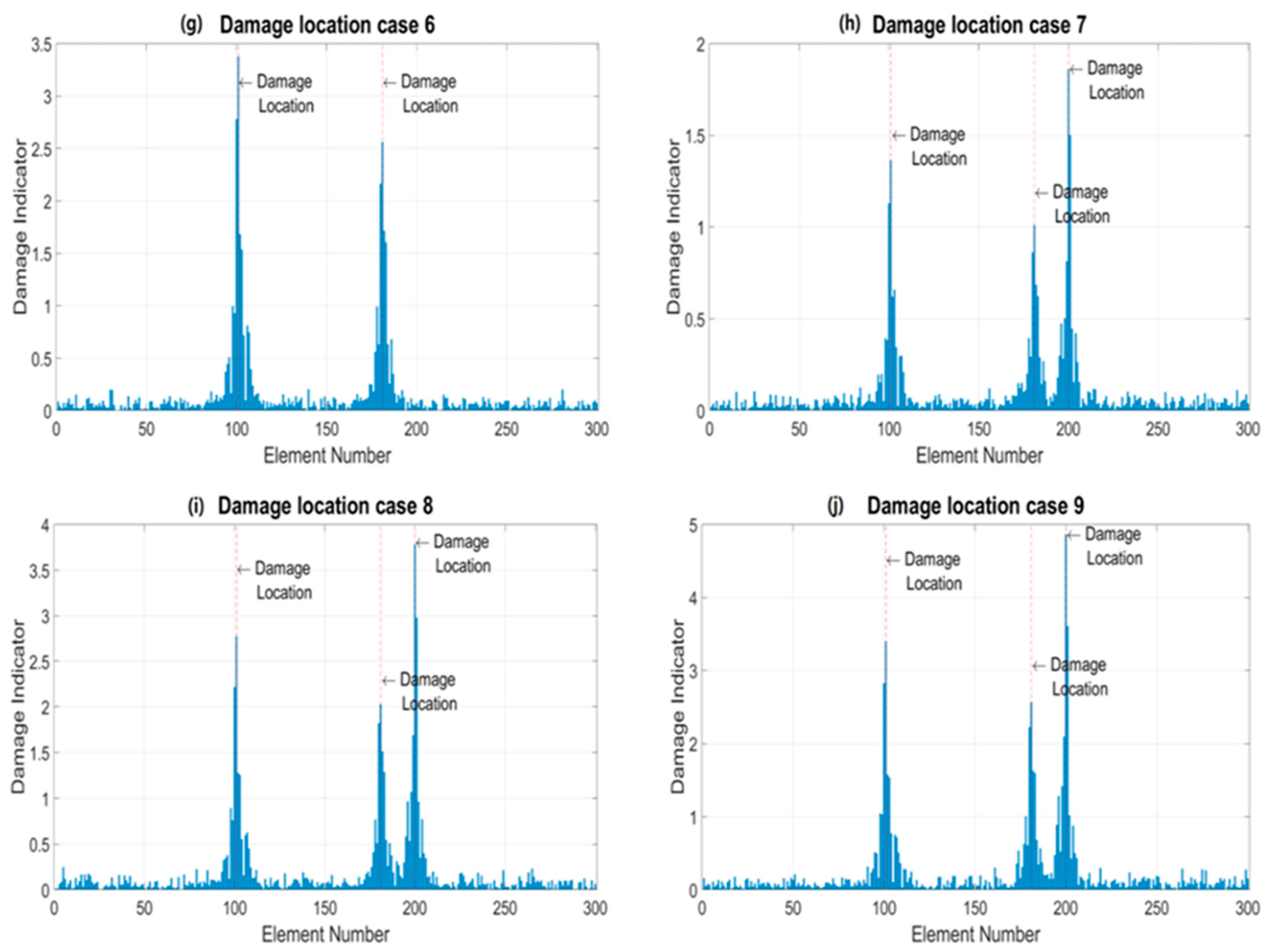
3.3. Damage Localization of Different Cases
4. Conclusions
- First, an FEM model of the underground metro shield tunnel structure was built based on previous experimental studies. The dynamic analyses on the numerical model were conducted under a moving load with different severity levels of damage at different locations and elements. To simulate the real-world tunnel scenarios, a different percentage of white noise was added to the calculated responses of the tunnel model to simulate polluted data measurements;
- Second, a DAE-based framework was used for damage identification, which can support deep neural networks in accurately investigating structural damage via damage feature extraction from input vibration raw signals (without any processing). In addition, root means square (RMS) was used to locate the damage at the different elements and locations in the model. The results were compared under the different schemes: white noise, varying levels of damage, and an intact state. The proposed deep auto encoder algorithm is trained and executed using MATLAB;
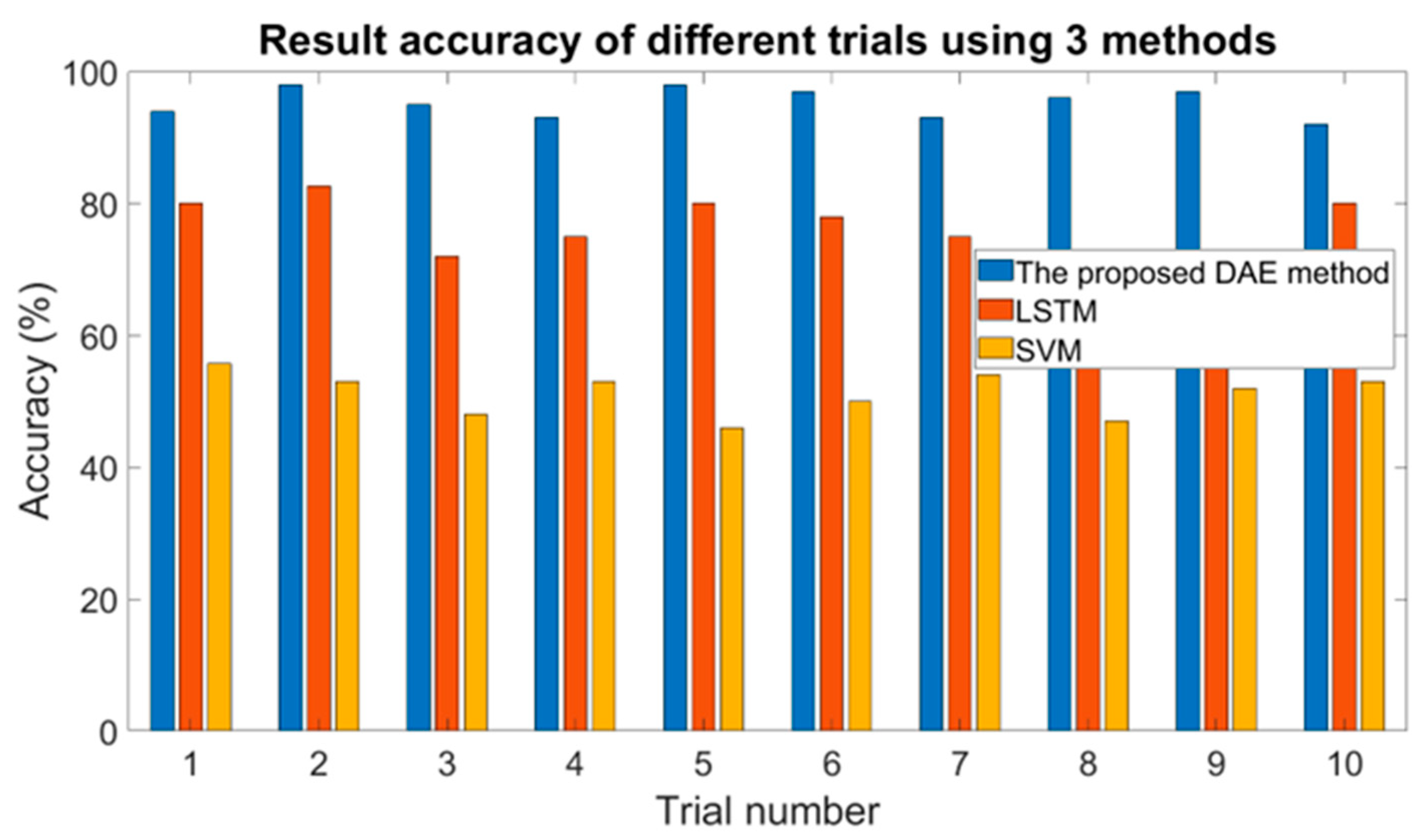
- To check the feasibility of the proposed approach on a small dataset such as a beam, a finite element model of the simply supported beam was built with ABAQUS software, and numerical simulations were conducted under an impact load. To evaluate the efficiency of the proposed DAE approach, two deep learning-based methods (LSTM and SVM) were also compared with the same input vibration data of the beam. The results of evaluating the beam and comparing it to the other two methods showed that the proposed DAE framework is also feasible for a small structure;
- A numerical investigation of the underground metro shield tunnel structure validated the accuracy and efficacy of the proposed deep autoencoder (DAE)-based framework execution regarding damage detection, damage size evaluation, and damage localization.
Author Contributions
Funding
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Feng, L.; Yi, X.; Zhu, D.; Xie, X.; Wang, Y. Damage detection of metro tunnel structure through transmissibility function and cross correlation analysis using local excitation and measurement. Mech. Syst. Signal Process. 2015, 60, 59–74. [Google Scholar] [CrossRef]
- Ore DIN. ORE Open Research Exeter; University of Exeter: Exeter, UK, 2016. [Google Scholar]
- Sadhu, A.; Narasimhan, S.; Antoni, J. A review of output-only structural mode identification literature employing blind source separation methods. Mech. Syst. Signal Process. 2017, 94, 415–431. [Google Scholar] [CrossRef]
- Li, H.N.; Ren, L.; Jia, Z.G.; Yi, T.H.; Li, D.S. State-of-the-art in structural health monitoring of large and complex civil infrastructures. J. Civ. Struct. Health Monit. 2016, 6, 3–16. [Google Scholar] [CrossRef]
- Kaveh, A.; Zolghadr, A. An improved CSS for damage detection of truss structures using changes in natural frequencies and mode shapes. Adv. Eng. Softw. 2015, 80, 93–100. [Google Scholar] [CrossRef]
- Iacovino, C.; Ditommaso, R.; Limongelli, M.P.; Ponzo, F.C. Comparison of the performance of two different approaches for damage detection on framed structures. In Proceedings of the 8th European Workshop on Structural Health Monitoring (EWSHM 2016), Bilbao, Spain, 5–8 July 2016; Volume 3, pp. 2017–2026. [Google Scholar]
- Hussain, Z.; Pu, Z.; Hussain, A.; Ahmed, S.; Shah, A.U.; Ali, A. Effect of fiber dosage on water permeability using a newly designed apparatus and crack monitoring of steel fiber–reinforced concrete under direct tensile loading. Struct. Health Monit. 2021, 21, 147592172110528. [Google Scholar] [CrossRef]
- Ahmed, S.; Hussain, A.; Hussain, Z.; Pu, Z.; Ostrowski, K.A.; Walczak, R. Effect of Carbon Black and Hybrid Steel-Polypropylene Fiber on the Mechanical and Self-Sensing Characteristics of Concrete Considering Different Coarse Aggregates’ Sizes. Materials 2021, 14, 7455. [Google Scholar] [CrossRef]
- Hao, H.; Xia, Y. Vibration-based damage detection of structures by genetic algorithm. J. Comput. Civ. Eng. 2002, 16, 222–229. [Google Scholar] [CrossRef]
- Padil, K.H.; Bakhary, N.; Hao, H. The use of a non-probabilistic artificial neural network to consider uncertainties in vibration-based-damage detection. Mech. Syst. Signal Process. 2017, 83, 194–209. [Google Scholar] [CrossRef]
- Ding, Z.; Yao, R.; Huang, J.; Huang, M.; Lu, Z.R. Structural damage detection based on residual force vector and imperialist competitive algorithm. Struct. Eng. Mech. 2017, 62, 709–717. [Google Scholar]
- Sun, M.; Han, T.X.; Liu, M.C.; Khodayari-Rostamabad, A. Multiple Instance Learning Convolutional Neural Networks for object recognition. In Proceedings of the 2016 23rd International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 4–8 December 2016; pp. 3270–3275. [Google Scholar] [CrossRef]
- Costilla-Reyes, O.; Scully, P.; Ozanyan, K.B. Deep Neural Networks for Learning Spatio-Temporal Features From Tomography Sensors. IEEE Trans. Ind. Electron. 2018, 65, 645–653. [Google Scholar] [CrossRef]
- Guo, X.; Chen, L.; Shen, C. Hierarchical adaptive deep convolution neural network and its application to bearing fault diagnosis. Meas. J. Int. Meas. Confed. 2016, 93, 490–502. [Google Scholar] [CrossRef]
- Janssens, O.; Slavkovikj, V.; Vervisch, B.; Stockman, K.; Loccufier, M.; Verstockt, S.; Van de Walle, R.; Van Hoecke, S. Convolutional Neural Network Based Fault Detection for Rotating Machinery. J. Sound Vib. 2016, 377, 331–345. [Google Scholar] [CrossRef]
- Zhang, W.; Li, C.; Peng, G.; Chen, Y.; Zhang, Z. A deep convolutional neural network with new training methods for bearing fault diagnosis under noisy environment and different working load. Mech. Syst. Signal Process. 2018, 100, 439–453. [Google Scholar] [CrossRef]
- Cai, C.; Wu, Q.; Song, P.; Zhou, H.; Akbar, M.; Ma, S. Study on diffusion of oxygen in coral concrete under different preloads. Constr. Build. Mater. 2021, 319, 126147. [Google Scholar] [CrossRef]
- Xia, M.; Li, T.; Xu, L.; Liu, L.; De Silva, C.W. Fault Diagnosis for Rotating Machinery Using Multiple Sensors and Convolutional Neural Networks. IEEE/ASME Trans. Mechatron. 2018, 23, 101–110. [Google Scholar] [CrossRef]
- Avci, O.; Abdeljaber, O.; Kiranyaz, S.; Hussein, M.; Inman, D.J. Wireless and real-time structural damage detection: A novel decentralized method for wireless sensor networks. J. Sound Vib. 2018, 424, 158–172. [Google Scholar] [CrossRef]
- Abdeljaber, O.; Avci, O.; Kiranyaz, M.S.; Boashash, B.; Sodano, H.; Inman, D.J. 1-D CNNs for structural damage detection: Verification on a structural health monitoring benchmark data. Neurocomputing 2018, 275, 1308–1317. [Google Scholar] [CrossRef]
- de Oliveira, M.A.; Monteiro, A.V.; Filho, J.V. A new structural health monitoring strategy based on PZT sensors and convolutional neural network. Sensors 2018, 18, 2955. [Google Scholar] [CrossRef]
- Hinton, G.E.; Salakhutdinov, R.R. Reducing the dimensionality of data with neural networks. Science 2006, 313, 504–507. [Google Scholar] [CrossRef]
- Schmidhuber, J. Deep Learning in neural networks: An overview. Neural Netw. 2015, 61, 85–117. [Google Scholar] [CrossRef]
- Abbas, N.; Yousaf, M.; Akbar, M.; Saeed, M.A.; Huali, P.; Hussain, Z. An Experimental Investigation and Computer Modeling of Direct Tension Pullout Test of Reinforced Concrete Cylinder. Inventions 2022, 7, 77. [Google Scholar] [CrossRef]
- Gan, M.; Wang, C.; Zhu, C. Construction of hierarchical diagnosis network based on deep learning and its application in the fault pattern recognition of rolling element bearings. Mech. Syst. Signal Process. 2016, 72–73, 92–104. [Google Scholar] [CrossRef]
- Mao, W.; He, L.; Yan, Y.; Wang, J. Online sequential prediction of bearings imbalanced fault diagnosis by extreme learning machine. Mech. Syst. Signal Process. 2017, 83, 450–473. [Google Scholar] [CrossRef]
- Bengio, Y. Learning Deep Architectures for AI; Foundations and Trends® in Machine Learning: Hanover, MA, USA, 2009; Volume 2. [Google Scholar]
- Loy-Benitez, J.; Li, Q.; Nam, K.J.; Yoo, C.K. Sustainable subway indoor air quality monitoring and fault-tolerant ventilation control using a sparse autoencoder-driven sensor self-validation. Sustain. Cities Soc. 2020, 52, 101847. [Google Scholar] [CrossRef]
- Pathirage, C.S.N.; Li, J.; Li, L.; Hao, H.; Liu, W.; Ni, P. Structural damage identification based on autoencoder neural networks and deep learning. Eng. Struct. 2018, 172, 13–28. [Google Scholar] [CrossRef]
- Wang, R.; Li, L.; Li, J. A novel parallel auto-encoder framework for multi-scale data in civil structural health monitoring. Algorithms 2018, 11, 112. [Google Scholar] [CrossRef]
- Chathurdara, P.; Nadith, S.; Jun, L.I.; Ling, L.I.; Hong, H.A.O.; Wanquan, L.I.U. Application of deep autoencoder model for structural condition monitoring. J. Syst. Eng. Electron. 2018, 29, 873–880. [Google Scholar] [CrossRef]
- Pathirage, C.S.N.; Li, J.; Li, L.; Hao, H.; Liu, W.; Wang, R. Development and application of a deep learning–based sparse autoencoder framework for structural damage identification. Struct. Health Monit. 2019, 18, 103–122. [Google Scholar] [CrossRef]
- Wang, S.; Li, J.; Luo, H.; Zhu, H. Damage identification in underground tunnel structures with wavelet based residual force vector. Eng. Struct. 2019, 178, 506–520. [Google Scholar] [CrossRef]
- Wang, S.; Long, X.; Luo, H.; Zhu, H. Damage identification for underground structure based on frequency response function. Sensors 2018, 18, 3033. [Google Scholar] [CrossRef]
- Su, Z.; Mechanics, C.H.-E. Shell-spring-contact model for shield tunnel segmental lining analysis and its application. Eng. Mech. 2007, 24, 131–136. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Symbol | Value |
|---|---|---|
| Number of hidden layers | – | 3 |
| Number of units in the input layer | – | 1000 |
| Number of units in the first hidden layer | – | 100 |
| Number of units in the second hidden layer | – | 200 |
| Number of units in the third hidden layer | – | 3000 |
| Learning rate of autoencoder | g | 0.2 |
| Momentum of the autoencoder | a | 0.8 |
| Iteration times of the autoencoder | T | 60 |
| kernel size of the autoencoder | r | 2.26 |
| Number of autoencoder | – | 3 |
| Conditions | 1 | 2 | 3 | 4 | 5 | 6 |
| Impact Load/kN. | 0 | 5 | 10 | 15 | 20 | 30 |
| Methods | Average Accuracy (%) | Standard Deviation Accuracy | Average Computation Time (s) |
|---|---|---|---|
| Proposed DAE method | 95.3% | 1.23 | 365.17 |
| LSTM | 82.65% | 4.40 | 370.82 |
| SVM | 55.75% | 2.76 | 165.23 |
| Properties | Value | Units |
|---|---|---|
| Metro Tunnel: | ||
| Diameter outside (D1) | 5.85 | m |
| Diameter inside (D2) | 5.05 | m |
| Length of the Metro (L) | 30 | m |
| Concrete: | ||
| Density (ρc) | 2500 | kg/m3 |
| Young’s Modulus (Ec) | 3.1 × 104 | MPa |
| Passion ratio (μc) | 0.2 | |
| Soil: | ||
| Width (Lw) | 58.5 | m |
| Depth (Ld) | 58.5 | m |
| Length (Ll) | 30 | m |
| Density (ρs) | 1800 | kg/m3 |
| Young’s Modulus (Es) | 18 | Mpa |
| Poisson ratio (μs) | 0.36 |
| Label No | Damage Scenarios | Segment | Damage Locations | Damage Severity % |
|---|---|---|---|---|
| 0 | UDG | null | null | null |
| 1 | DMG1 | S100 | x = 100 m | 4% |
| 2 | DMG2 | S100 | x = 100 m | 8% |
| 3 | DMG3 | S100 | x = 100 m | 10% |
| 4 | DMG4 | S100, S180 | x = 100, 180 m | 4% |
| 5 | DMG5 | S100, S180 | x = 100, 180 m | 8% |
| 6 | DMG6 | S100, S180 | x = 100, 180 m | 10% |
| 7 | DMG7 | S100, S180, S200 | x = 100 m, 180 m, 200 m | 4% |
| 8 | DMG8 | S100, S180, S200 | x = 100 m, 180 m, 200 m | 8% |
| 9 | DMG9 | S100, S180, S200 | x = 100 m, 180 m, 200 m | 10% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Abbas, N.; Umar, T.; Salih, R.; Akbar, M.; Hussain, Z.; Haibei, X. Structural Health Monitoring of Underground Metro Tunnel by Identifying Damage Using ANN Deep Learning Auto-Encoder. Appl. Sci. 2023, 13, 1332. https://doi.org/10.3390/app13031332
Abbas N, Umar T, Salih R, Akbar M, Hussain Z, Haibei X. Structural Health Monitoring of Underground Metro Tunnel by Identifying Damage Using ANN Deep Learning Auto-Encoder. Applied Sciences. 2023; 13(3):1332. https://doi.org/10.3390/app13031332
Chicago/Turabian StyleAbbas, Nadeem, Tariq Umar, Rania Salih, Muhammad Akbar, Zahoor Hussain, and Xiong Haibei. 2023. "Structural Health Monitoring of Underground Metro Tunnel by Identifying Damage Using ANN Deep Learning Auto-Encoder" Applied Sciences 13, no. 3: 1332. https://doi.org/10.3390/app13031332
APA StyleAbbas, N., Umar, T., Salih, R., Akbar, M., Hussain, Z., & Haibei, X. (2023). Structural Health Monitoring of Underground Metro Tunnel by Identifying Damage Using ANN Deep Learning Auto-Encoder. Applied Sciences, 13(3), 1332. https://doi.org/10.3390/app13031332