
Open-Pit Map: An HD Map Data Model for Open-Pit Mines




Abstract
:1. Introduction
2. Application Scenario of HD Maps for Open-Pit Mines
2.1. Research Status of HD maps
- “NDS (Open Lane Model)”. NDS is a navigation electronic map data storage standard based on an embedded database, which is oriented toward vehicle navigation and supports incremental updates [13]. It divides the content of map data into six logical functional structure units (building blocks): road, lane, name, basic map display, area of interest, and traffic information. The Open Lane Model 1.0 released by NDS is an independent release of the standard lane modeling, lane connection, lane identification, lane type attributes, and other elements to further promote the application of navigation maps in autonomous driving.
- “Lanelets”. Lanelets is an open source HD map format for autonomous driving [14,15]. A road network in Lanelets maps is made up of lanes, roads, and intersections. Each lane segment consists of left and right borders, which are themselves polylines. Interconnecting lanes (lanelets) can be used to describe the driving area of an autonomous vehicle, which can satisfy the path planning and traffic rule compliance of an autonomous vehicle. Lanelet2 describes the frame of the map in more detail. The basic elements are divided into two layers: the physical layer, which consists of real, observable elements, including strings of points and lines and the relationship layer, including traffic rules and applicable lanes.
- “OpenDRIVE”. OpenDRIVE is an open data standard and a description of a static road network, which is commonly used in driving simulation and traffic simulation [16]. It uses nodes and elements to organize various types of information in the road and adds detailed attributes. For example, roads, lanes, links, traffic lights, and intersections are used to build road traffic networks.
- “Apollo OpenDRIVE”. Baidu’s open source project, Apollo, has made some improvements to the OpenDRIVE format based on its own application scenarios and practical experience [17]. For example, Apollo Opendrive uses point sequences composed of absolute coordinate points to describe the geometric shape of elements, such as the description of road boundaries, which can describe complex lane shapes more efficiently and is more common in data expression.
2.2. Application Scenarios of HD Maps in Open-Pit Mining
- Production operation coordination and exchange scenarios, including scenarios where mining trucks and shovels cooperate during loading operations, mining trucks coordinate with auxiliary vehicles during unloading operations, and mining trucks queue for exchange during loading and unloading operations.
- Loading operation coordination. Taking the example of coordination between mining trucks and shovels, in the loading area near the blasting stockpile, shovels excavate overburden and ore, loading them into transport trucks. During this process, the trucks and shovels must work together to determine the route for the trucks to enter the loading area. The scenario is described as follows: empty mining trucks enter the loading area and queue up in a designated zone, waiting for loading. The trucks receive information about the shovel’s position and their own loading bay. Upon receiving the instruction to enter the loading bay, the mining trucks move in, are loaded, and then depart.
- Unloading operation coordination. Mining trucks typically have three types of unloading points: dumpsites, crushing stations, and stockyards. When a mining truck enters an unloading area, coordination is required between the vehicles and auxiliary equipment. The scenario is described as follows: transport trucks enter the unloading area and wait in a designated zone for unloading, the truck receives the signal to unload, moves into the unloading bay, unloads, and then departs.
- 2.
- Unmanned transportation and safety traffic management scenarios, which refer to scenarios in which mining trucks engage in activities such as platooning, obstacle avoidance, encounters, passing, and collision prevention.
- Vehicle platooning. Vehicles and equipment traveling on roads will continuously collect real-time information about the leading vehicle’s status, speed, and the distance between vehicles. Information is used to determine a safe following distance and guide the vehicle to either slow down or maintain its current speed.
- Vehicle obstacle avoidance. In addition to regular platooning in open-pit mining, real-time road conditions may involve overtaking actions by different types of operational equipment, detours around equipment undergoing maintenance, and obstacle avoidance in situations where large rocks and soil are scattered on the road. Vehicles and equipment must make real-time decisions and plan suitable routes in these scenarios.
- Intersection encounter and collision prevention. When multiple vehicles travel toward each other or encounter each other at intersections, real-time encounter information (vehicle type, speed, distance, etc.) is transmitted to each vehicle. Each vehicle, based on encounter rules (priority for heavy vehicles, priority for unmanned vehicles, etc.), will either stop or slow down to ensure smooth traffic flow at intersections. With knowledge of the drivable areas, vehicles can follow designated paths. Additionally, the precise three-dimensional positioning of vehicles within the scenario effectively prevents equipment collisions.
- 3.
- Production scheduling and path planning scenarios. Production scheduling is crucial for ensuring orderly operations and optimal efficiency in a mining operation. Mining trucks shuttle between loading and unloading points based on ore allocation instructions. After each loading or unloading, the next optimal loading or unloading point and the best route are continuously evaluated. Additionally, equipment conditions such as fueling (charging) and maintenance needs are considered in real-time.
- Path planning. Based on scheduling directives, HD map generates a global planning path between the starting point and destination. Mining trucks are then driven following this path. In the process of driving, local path planning is carried out according to vehicle working conditions and real-time road conditions. When no predefined road exists, paths are generated in real-time using information from the HD map about drivable areas.
- 4.
- Safety alert and real-time road condition scenarios. In open-pit mining, roadside equipment and sensors on transportation vehicles identify information about road obstacles, road surface water accumulation, snow conditions, weather conditions, and more. This information is transmitted to the control center in real-time and is updated on the dynamic information layer of the HD map. It is promptly relayed to any potentially affected equipment. When the mining operation is planning explosives handling and blasting activities, it is essential to establish alert zones for both the construction phase and the blasting phase. During these phases, the entry of equipment and personnel is strictly prohibited. The HD map must clearly define the boundaries of these restricted areas.
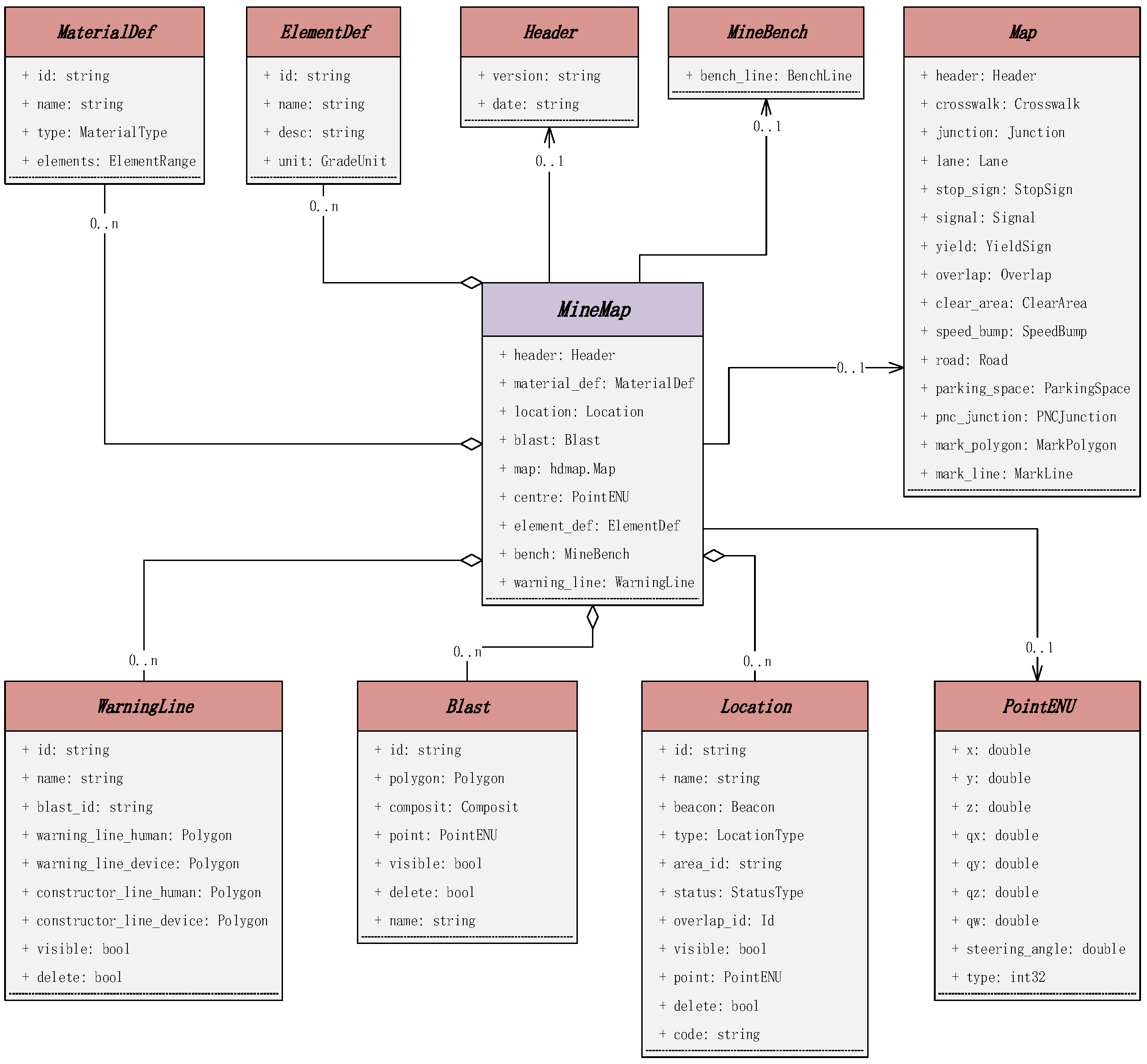
3. OpenPit-Map Data Model
- “Header”. This section is used to describe version and date information in the HD map for open-pit mines.
- “PointENU”. This data structure is utilized to describe geometric points. A single point is used to represent key information in the HD map, such as the map’s center point and position points for various areas. Points are combined to create key line information, which can describe features like road centerlines, boundaries, and terraces in an open-pit mine. Additionally, points are used to form polygons to describe the shape of area positions, such as blasting stockpile boundaries, parking areas, and alert zones.
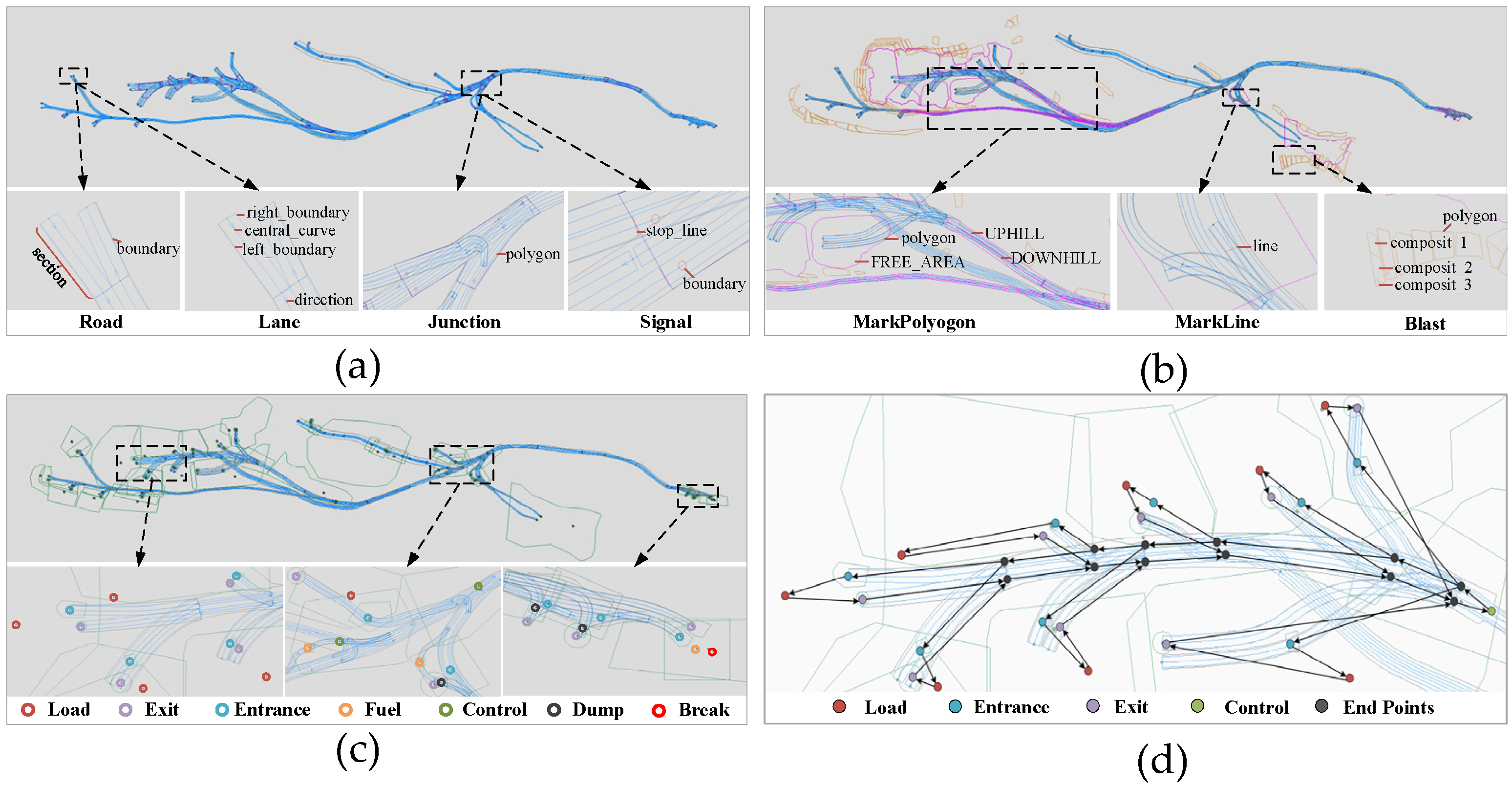
- “Map”. This section is used to describe and store the geometric and topological structure of the road network. It can be divided into five main parts. The first part consists of road elements, including roads, which are composed of one or more road sections. Each road section is made up of one or more lanes with different speed limits and travel directions. Each lane has left and right road boundaries. Lanes are formed by the road centerline, lane left and right boundaries, and lane sample association lines. Lane attributes include length, weight and weight limit, type, direction, turning, slope, name, lane closure status (default open), and topological relationships such as predecessors and successors, left and right adjacency. The second part consists of intersection elements, including junctions, which are represented by polygons that define their boundary ranges. The third part includes traffic signal elements, which consist of signal signs represented by boundary lines and stop lines, as well as other signal signs like stop signals and yield signs. The fourth part is about area information elements, including pedestrian areas, no-parking areas, speed bump areas, and parking areas. There are also marking lines used to mark important road elements in the open-pit mine scene, such as obstacles, gantries, and waiting lines. Marking polygons are used to describe free areas on uphill or downhill sections or areas where vehicles cannot follow lane paths. The fifth part consists of logical relationship elements, overlapping areas used to establish hierarchical or spatial connections between elements like roads, objects, and regions.
- “ElementDef”. It is used to describe the information of various elements produced by open-pit mines, such as the description of CaCO3, MgO, CaO, and other elements.
- “MaterialDef”. The information used to describe the material produced by open-pit mines is divided into two types: WASTE and ORE. Attributes contain one or more element information and ore grade ranges. The description of the material determines the ore blending method and mining scheduling plan of the open-pit mine.
- “Blast”. Used to describe the blasting range of ore in open-pit mines. It is represented by a polygon outlining its geometric scope. Blast is composed of one or more components of the blasting stockpile (Composites). Material is used to provide information about the materials produced by the blasting stockpile, including attributes such as average grade and bulk density. The definition of blasting stockpile information is crucial for the workflow of open-pit mining, as it is often associated with loading areas.
- “WarningLine”. This is used to describe alert zones during blasting and construction. It is represented by a polygon outlining its geometric range. Alert zones are categorized into personnel and equipment alert zones, which are relevant during both blasting and construction activities.
- “MineBench”. Used to describe the terraces in open-pit mining. A terrace is composed of multiple bench lines (BenchLine), with two types: BL_TOP (top line) and BL_BOTTOM (bottom line). Describing bench lines helps to define the drivable area for production operations.
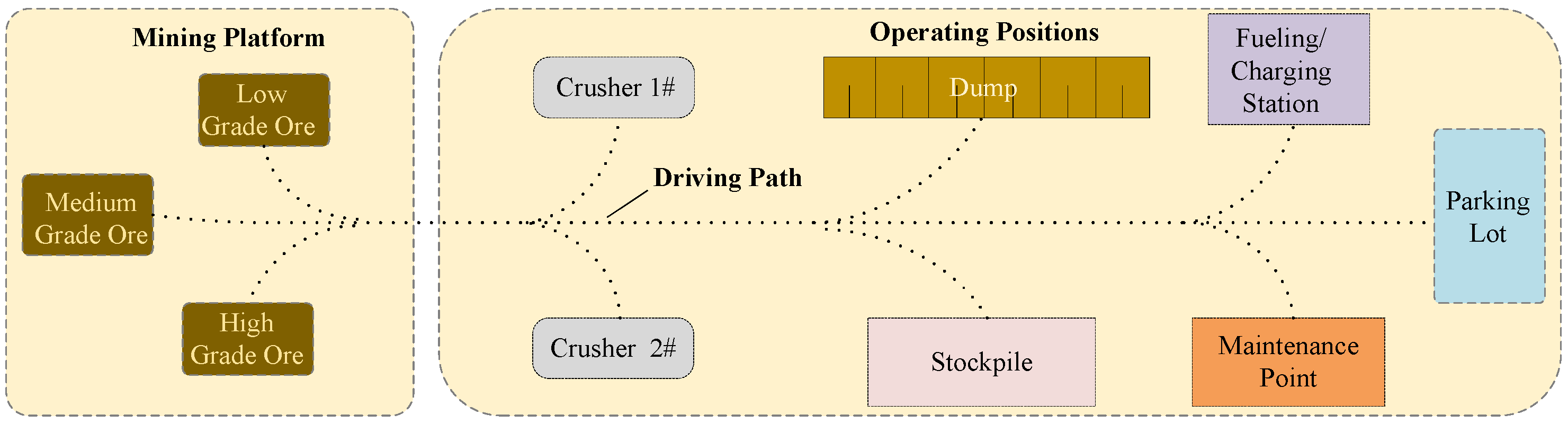
- “Location”. This is used to describe various area positions within the open-pit mining scene and is a core part of the data model. Defining and accurately locating these positions are crucial for mining production scheduling, path planning, and safety management. The UML class diagram of its data structure is shown in Figure 5. There are various types of locations, including crushing stations, stockyards, dumps, intersection control areas, maintenance areas, fueling stations, rest areas, loading points, shift change areas, area entrances, and area exits, totaling 11 types. When describing specific attributes for each type of location, the crushing stations, stockyards, and dumpsites are collectively referred to as ore unloading locations. For each type of location, there are descriptions of nine specific positions. Location status information (StatusType) includes closed, ready, standby, delayed, and shift change statuses. The definition of location status is important for real-time information during scheduling, ensuring real-time and optimal scheduling under both normal and emergency circumstances.

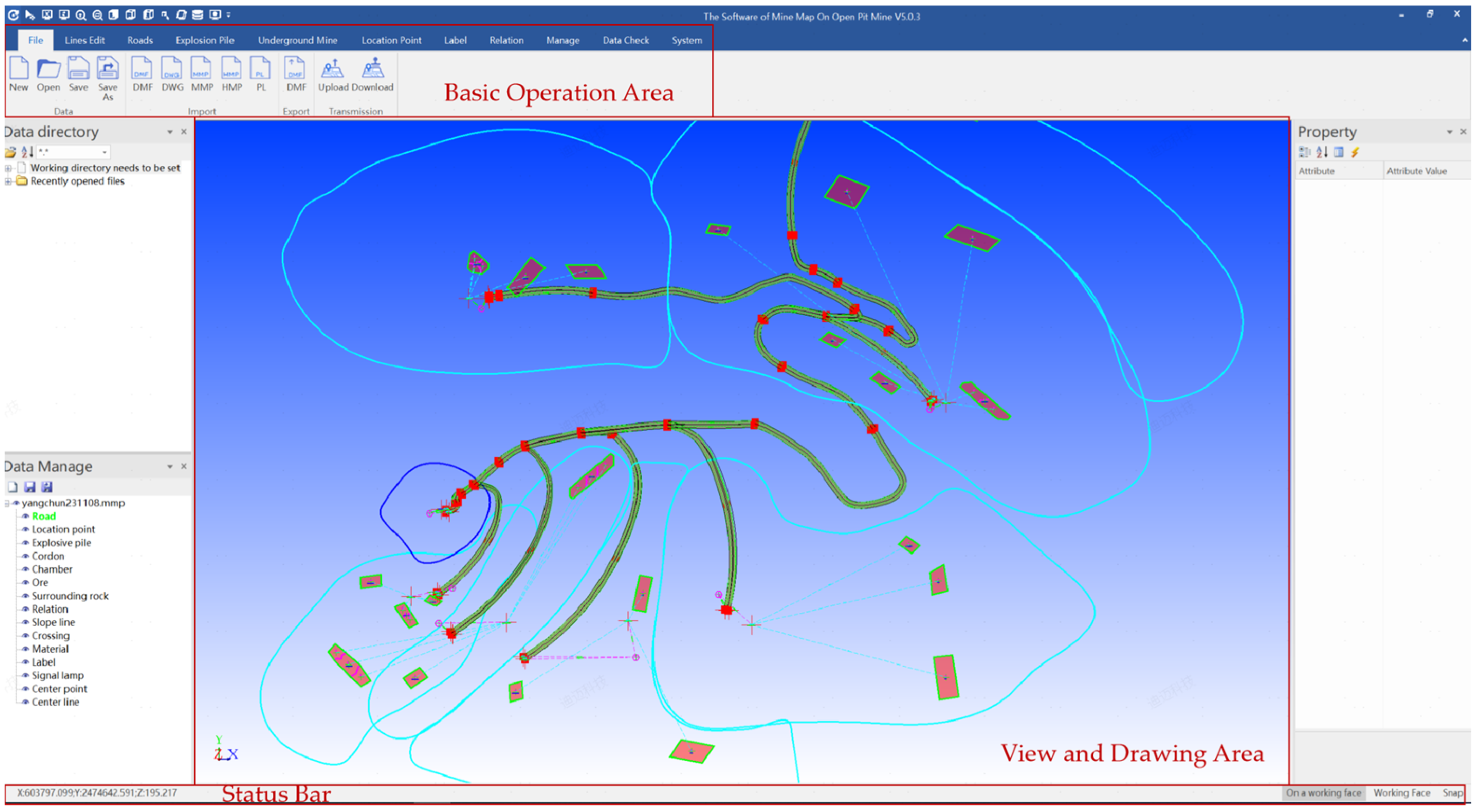
4. Layer Information and Visualization of the HD Map
5. Application
5.1. Intelligent Scheduling System
5.2. Production Scenarios Maintenance System
5.3. Autonomous Driving System
6. Discussion
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bao, Z.; Hossain, S.; Lang, H.; Lin, X. A review of high-definition map creation methods for autonomous driving. Eng. Appl. Artif. Intell. 2023, 122, 106125. [Google Scholar] [CrossRef]
- Liu, R.; Wang, J.; Zhang, B. High definition map for automated driving: Overview and analysis. J. Navig. 2020, 73, 324–341. [Google Scholar] [CrossRef]
- Liu, H.; Pan, W.; Hu, Y.; Li, C.; Yuan, X.; Long, T. A Detection and Tracking Method Based on Heterogeneous Multi-Sensor Fusion for Unmanned Mining Trucks. Sensors 2022, 22, 5989. [Google Scholar] [CrossRef] [PubMed]
- Jin, C.; Yi, T.; Shen, Y.; Khajepour, A.; Meng, Q. Comparative study on the economy of hybrid mining trucks for open-pit mining. IET Intell. Transp. Syst. 2019, 13, 201–208. [Google Scholar] [CrossRef]
- Cacciuttolo, C.; Atencio, E. In-Pit Disposal of Mine Tailings for a Sustainable Mine Closure: A Responsible Alternative to Develop Long-Term Green Mining Solutions. Sustainability 2023, 15, 6481. [Google Scholar] [CrossRef]
- Seif, H.G.; Hu, X. Autonomous driving in the iCity—HD maps as a key challenge of the automotive industry. Engineering 2016, 2, 159–162. [Google Scholar] [CrossRef]
- Li, Y.; Li, Z.; Teng, S.; Zhang, Y.; Zhou, Y.; Zhu, Y.; Cao, D.; Tian, B.; Ai, Y.; Xuanyuan, Z. AutoMine: An unmanned mine dataset. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 18–24 June 2022; pp. 21308–21317. [Google Scholar]
- Johansen, K.; Erskine, P.D.; Mccabe, M.F. Using Unmanned Aerial Vehicles to assess the rehabilitation performance of open cut coal mines. J. Clean. Prod. 2019, 209, 819–833. [Google Scholar] [CrossRef]
- Zhao, Z.; Bi, L. A New Challenge: Path Planning for Autonomous Truck of Open-Pit Mines in The Last Transport Section. Appl. Sci. 2020, 10, 6622. [Google Scholar] [CrossRef]
- Wang, X.; Li, H.; Hu, M.; Dou, Q.; Ouyang, W.; Ma, G.; Li, Y.; Qin, H. HD Map Construction and Update System for Autonomous Driving in Open-Pit Mines. IEEE Syst. J. 2023, 1–12. [Google Scholar] [CrossRef]
- Kang, Y.; Magdy, A. HiDaM: A unified data model for high-definition (HD) map data. In Proceedings of the 2020 IEEE 36th International Conference on Data Engineering Workshops (ICDEW), Dallas, TX, USA, 20–24 April 2020. [Google Scholar]
- Ruan, S.; Li, S.; Lu, C.; Gu, Q. A Real-Time Negative Obstacle Detection Method for Autonomous Trucks in Open-Pit Mines. Sustainability 2022, 15, 120. [Google Scholar] [CrossRef]
- Chen, L.; Sima, C.; Li, Y.; Zheng, Z.; Xu, J.; Geng, X.; Li, H.; He, C.; Shi, J.; Qiao, Y. PersFormer: 3D lane detection via perspective transformer and the openlane benchmark. In Proceedings of the 17th European Conference on Computer Vision—ECCV 2022, Tel Aviv, Israel, 23–27 October 2022; Springer: Cham, Switzerland, 2022. [Google Scholar]
- Bender, P.; Ziegler, J.; Stiller, C. Lanelets: Efficient map representation for autonomous driving. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014. [Google Scholar]
- Poggenhans, F.; Pauls, J.; Janosovits, J.; Orf, S.; Naumann, M.; Kuhnt, F.; Mayr, M. Lanelet2: A high-definition map framework for the future of automated driving. In Proceedings of the 2018 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018. [Google Scholar]
- ASAM OpenDRIVE, v 1.7.0; Open Dynamic Road Information for Vehicle Environment; Association for Standardization of Automation and Measuring Systems: Hoehenkirchen, Germany, 2021.
- Fan, H.; Zhu, F.; Liu, C.; Zhang, L.; Zhuang, L.; Li, D.; Zhu, W.; Hu, J.; Li, H.; Kong, Q. Baidu apollo em motion planner. arXiv 2018, arXiv:1807.08048. [Google Scholar]
- Ge, S.; Wang, F.; Yang, J.; Ding, Z.; Wang, X.; Li, Y.; Teng, S.; Liu, Z.; Ai, Y.; Chen, L. Making standards for smart mining operations: Intelligent vehicles for autonomous mining transportation. IEEE Trans. Intell. Veh. 2022, 7, 413–416. [Google Scholar] [CrossRef]
- Brown, C. Autonomous vehicle technology in mining. Eng. Min. J. 2012, 213, 30. [Google Scholar]
- Tang, J.; Zhao, B.; Yang, C.; Zhou, C.; Chen, S.; Ni, X.; Ai, Y. An Architecture and Key Technologies of Autonomous Truck Dispatching System in Open-pit Mines. In Proceedings of the 2022 International Conference on Cyber-Physical Social Intelligence (ICCSI), Nanjing, China, 18–21 November 2022. [Google Scholar]
- Benlaajili, S.; Moutaouakkil, F.; Chebak, A. Infrastructural requirements for the implementation of autonomous trucks in open-pit mines. E3S Web Conf. 2021, 315, 03009. [Google Scholar] [CrossRef]
- Li, B.; Ouyang, Y.; Li, X.; Cao, D.; Zhang, T.; Wang, Y. Mixed-integer and conditional trajectory planning for an autonomous mining truck in loading/dumping scenarios: A global optimization approach. IEEE Trans. Intell. Veh. 2022, 8, 1512–1522. [Google Scholar] [CrossRef]
- Fang, Y.; Peng, X. Micro-Factors-Aware Scheduling of Multiple Autonomous Trucks in Open-Pit Mining via Enhanced Metaheuristics. Electronics 2023, 12, 3793. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NDS | Lanelets | OpenDRIVE | |
|---|---|---|---|
| Version | 2.5.4 | lanelet2 | 1.7.0 |
| Application object | Embedded navigation system | Highly autonomous driving system | Driving and traffic simulation |
| Road geometry construction | A set of shape points constitutes a multi-segment line representing a road route | Without road modeling | Builds roads along reference lines |
| Lane geometry | Consists of lane center line and lane boundary | The left and right borders form small lanes | Established by the offset to the road reference line |
| Establishment of topological relationship | Represented by route links | Represented by a lanelet’s back-to-back connection and left-right adjacency relation | The topological relationship between the road and lane is described by the front and back inherited connections in links |
| Data organization structure | Level and tile | Modular structure | Hierarchical structure |
| Coordinate system | WGS84(x, y) EGM96(z) | ETRS89(x, y) | WGS84(x, y, z) Local coordinate system |
| Data storage format | SQLite | XML-based OSM data format | XML schemata |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, X.; Wang, Z.; Huang, P.; Tian, S.; Bi, L. Open-Pit Map: An HD Map Data Model for Open-Pit Mines. Appl. Sci. 2023, 13, 12681. https://doi.org/10.3390/app132312681
Xu X, Wang Z, Huang P, Tian S, Bi L. Open-Pit Map: An HD Map Data Model for Open-Pit Mines. Applied Sciences. 2023; 13(23):12681. https://doi.org/10.3390/app132312681
Chicago/Turabian StyleXu, Xingliang, Zhuo Wang, Pengli Huang, Suchuan Tian, and Lin Bi. 2023. "Open-Pit Map: An HD Map Data Model for Open-Pit Mines" Applied Sciences 13, no. 23: 12681. https://doi.org/10.3390/app132312681
APA StyleXu, X., Wang, Z., Huang, P., Tian, S., & Bi, L. (2023). Open-Pit Map: An HD Map Data Model for Open-Pit Mines. Applied Sciences, 13(23), 12681. https://doi.org/10.3390/app132312681