

Identification of Dynamic Vibration Parameters of Partial Interaction Composite Beam Bridges Using Moving Vehicle



Abstract
:1. Introduction
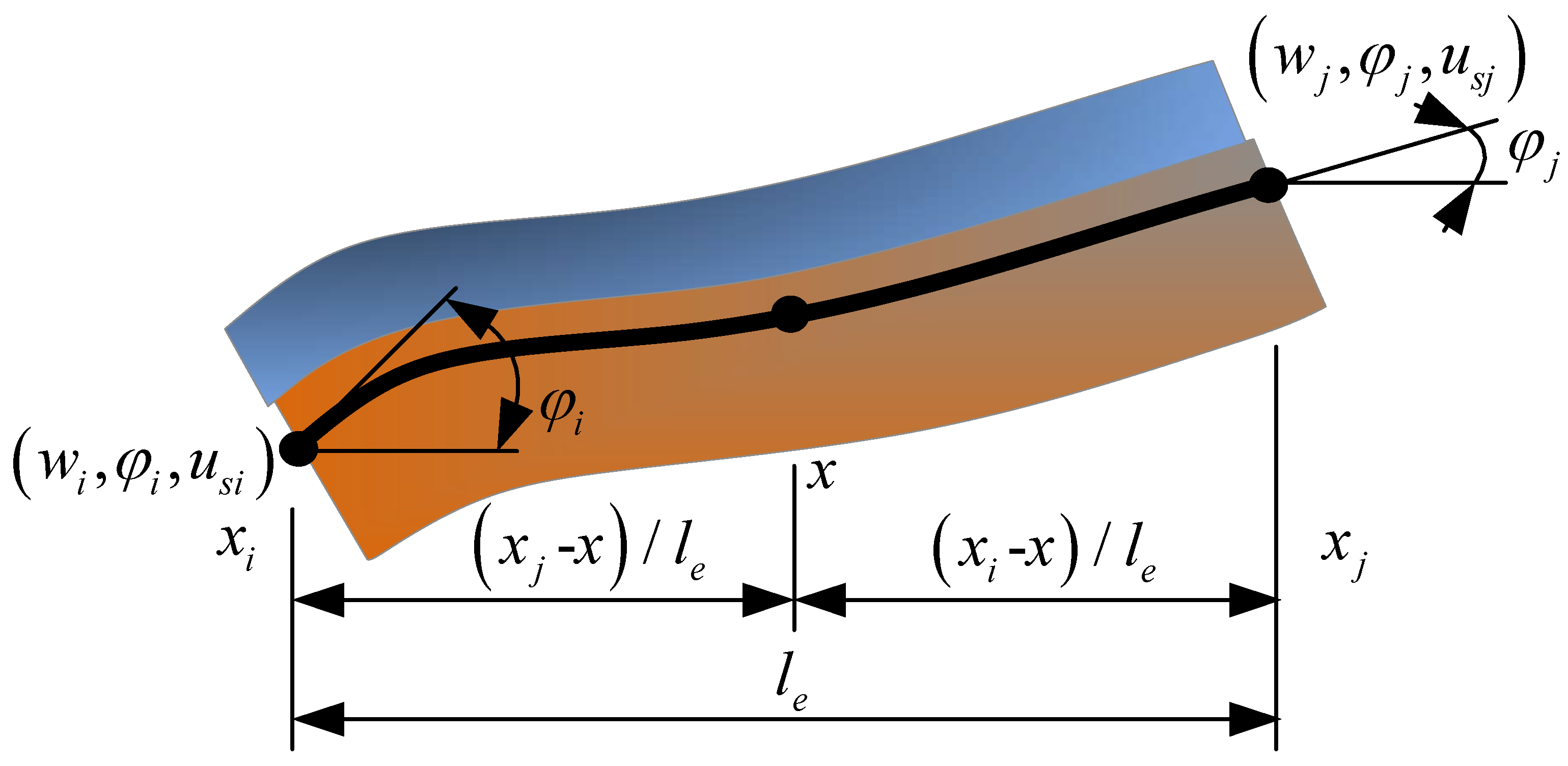
2. Vehicle-Composite Beam Bridge Interaction Vibration
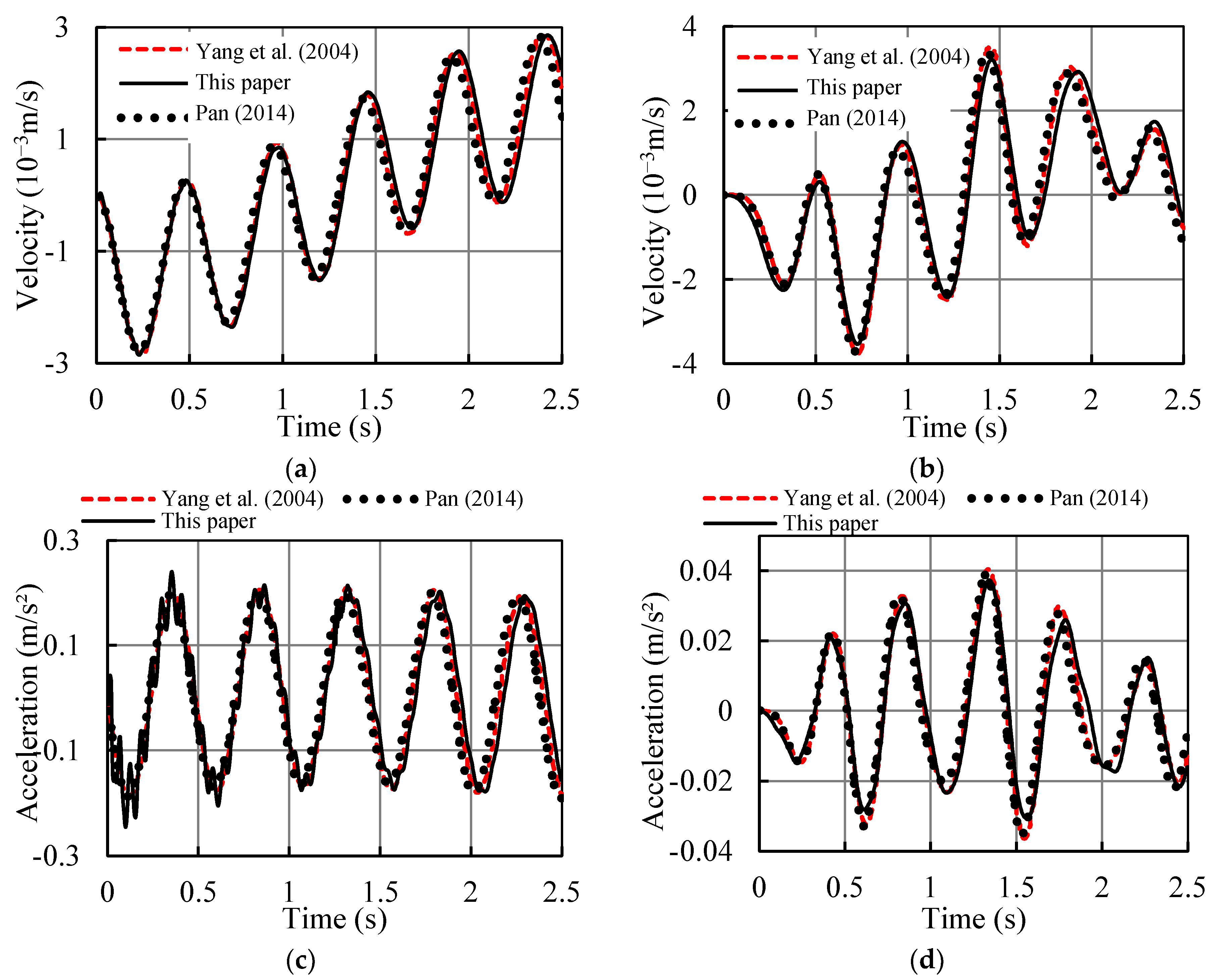
3. FE Method Validation
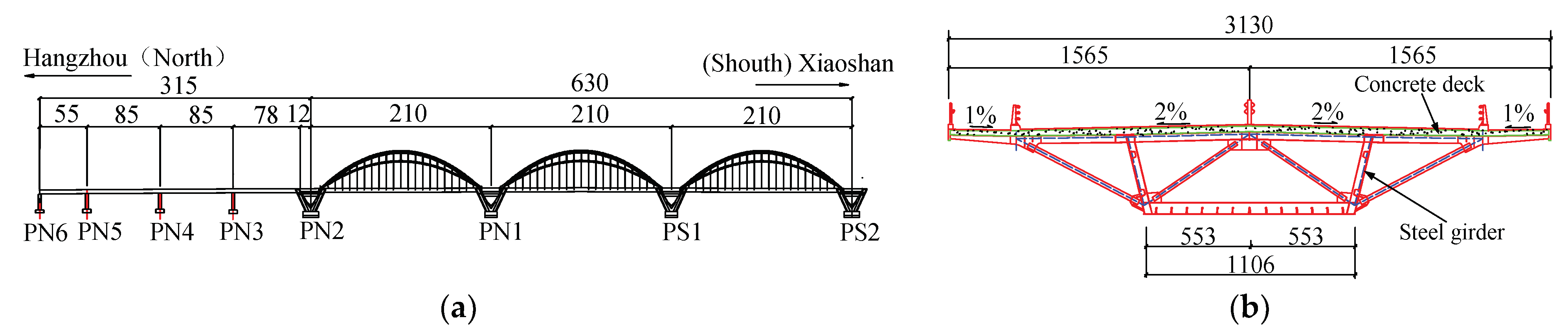
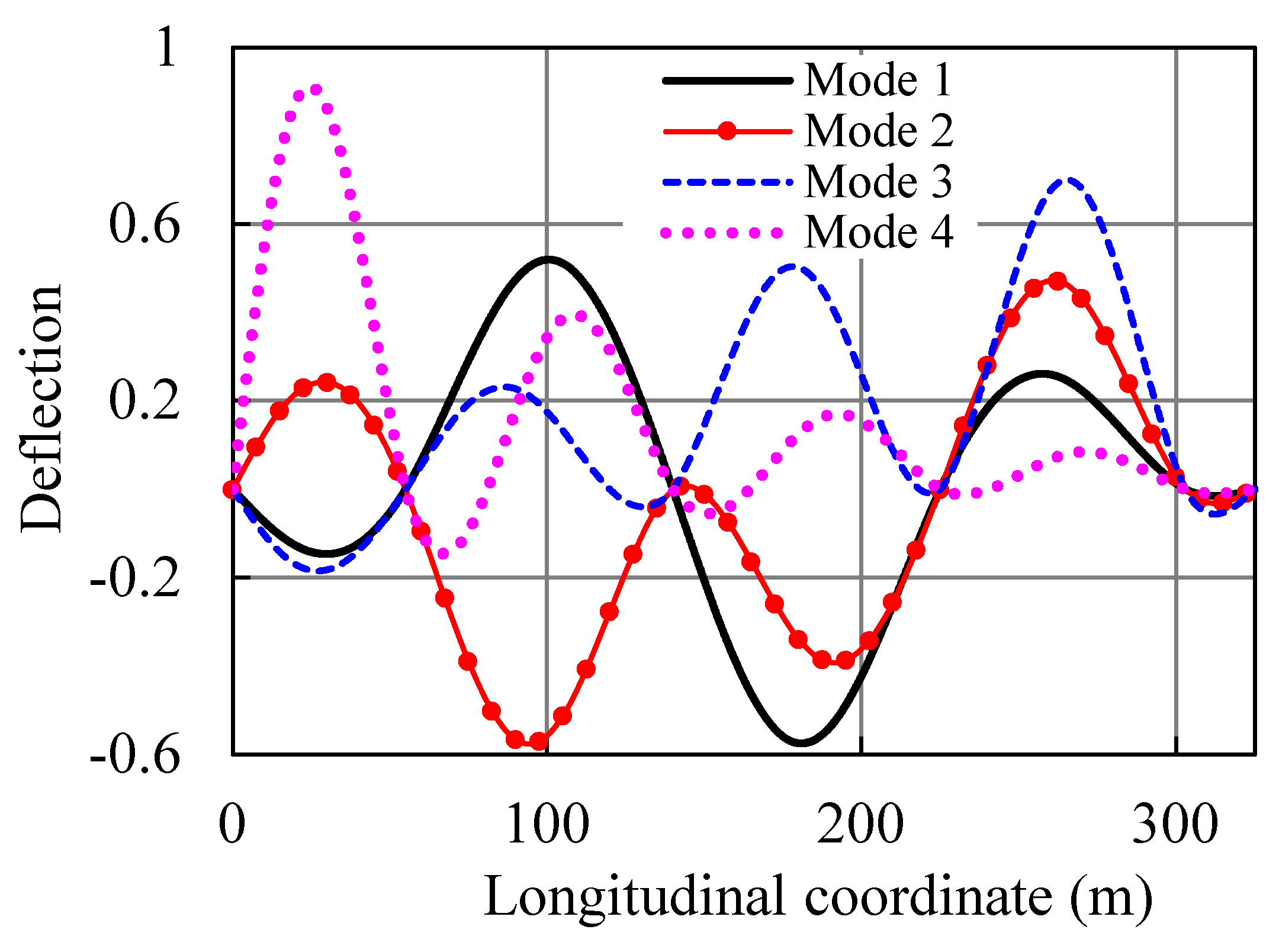
4. Numerical Application to Jiubao Bridge
5. Parameters Study
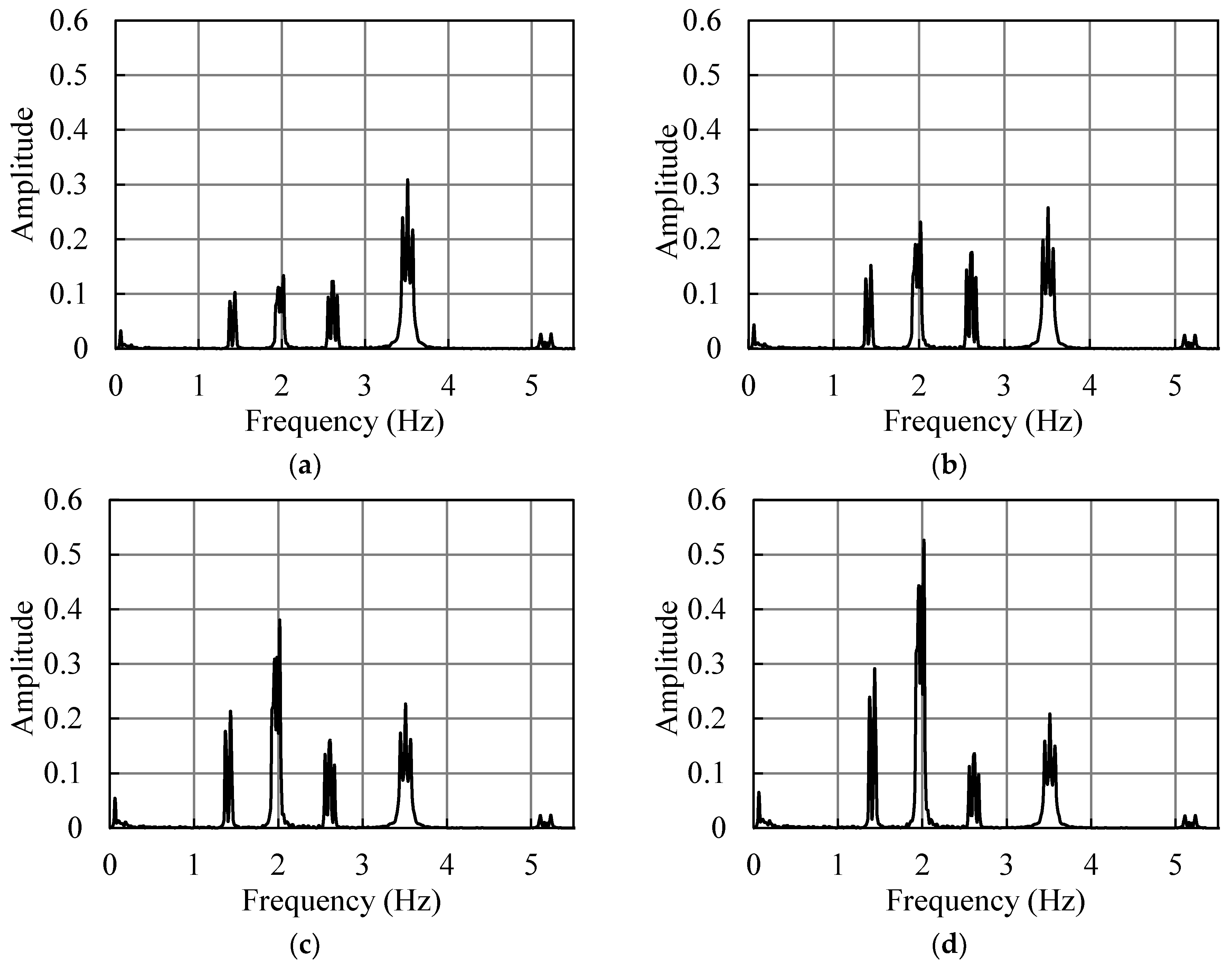
5.1. Influence of Moving Speed of Vehicle
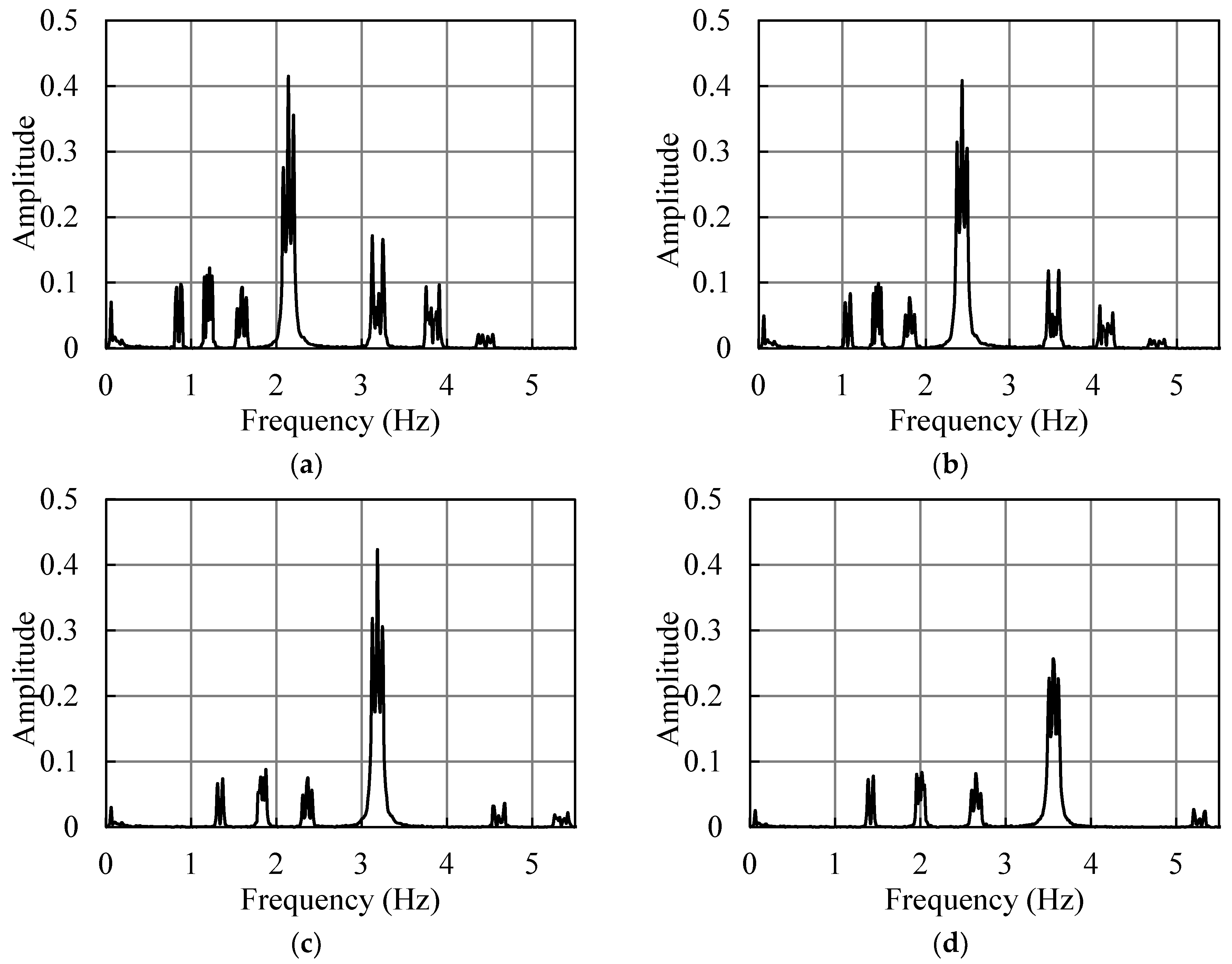
5.2. Influence of Vehicle Stiffness
5.3. Influence of Vehicle Damping
5.4. Influence of Vehicle Mass
5.5. Influence of Shear Stiffness
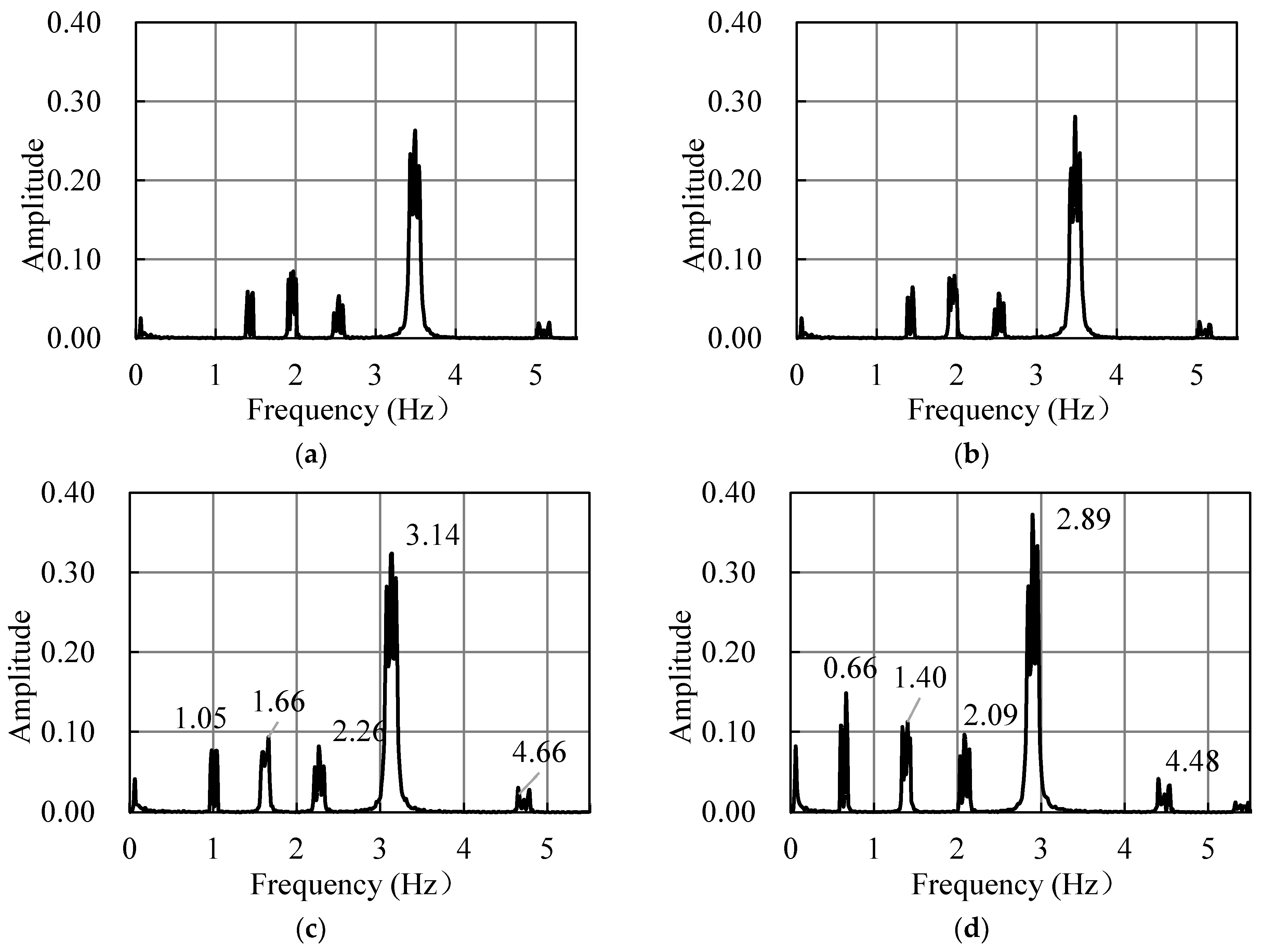
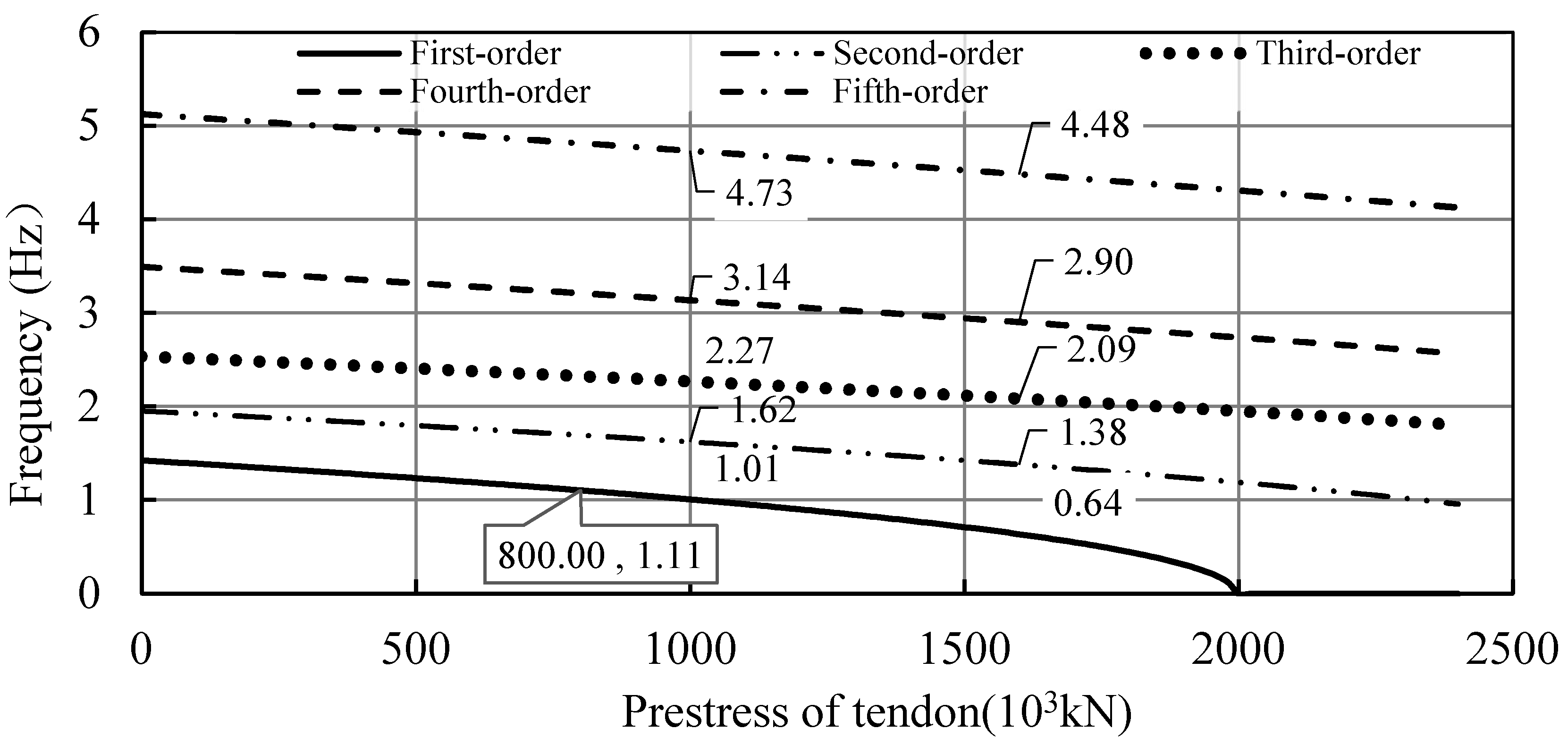
5.6. Influence of Prestress of Tendon
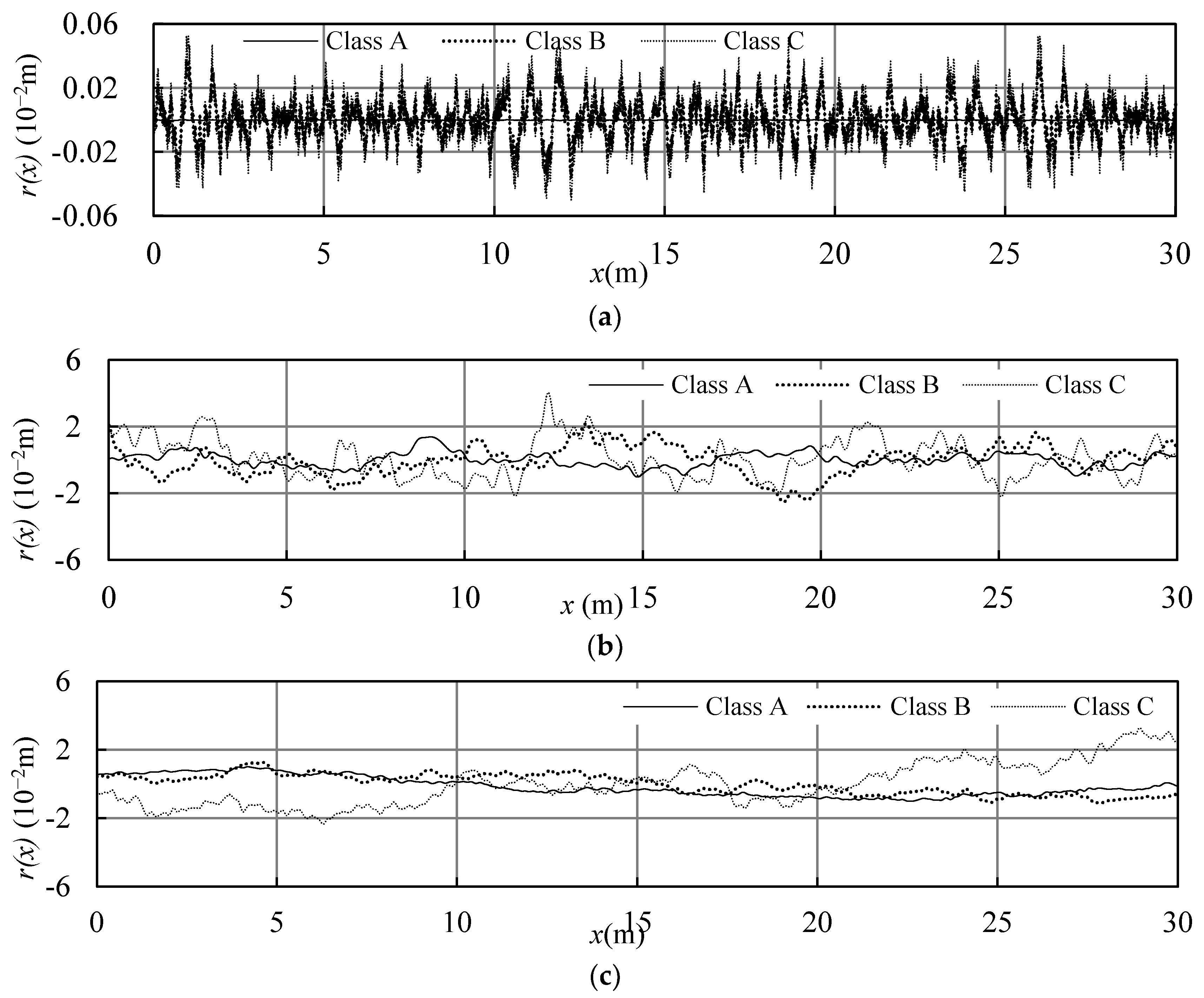
5.7. Influence of Pavement Roughness
5.7.1. Pavement Surface Roughness Generation Method
5.7.2. Influence of Pavement Unevenness on the Northern Approach of Jiubao Bridge
5.7.3. Influence of Vehicle Speed under Uneven Pavement Disturbances
5.7.4. Influence of Vehicle Mass Uneven Pavement Disturbances
5.8. Influence of Interference Force
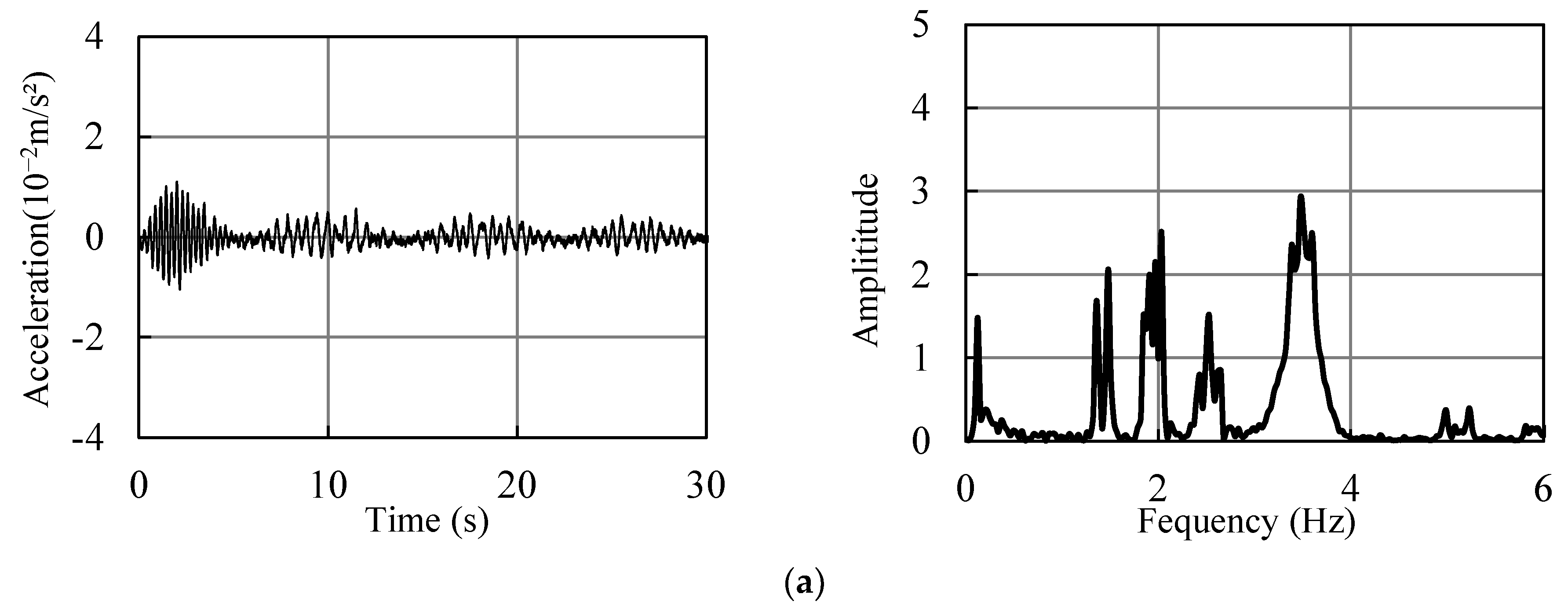
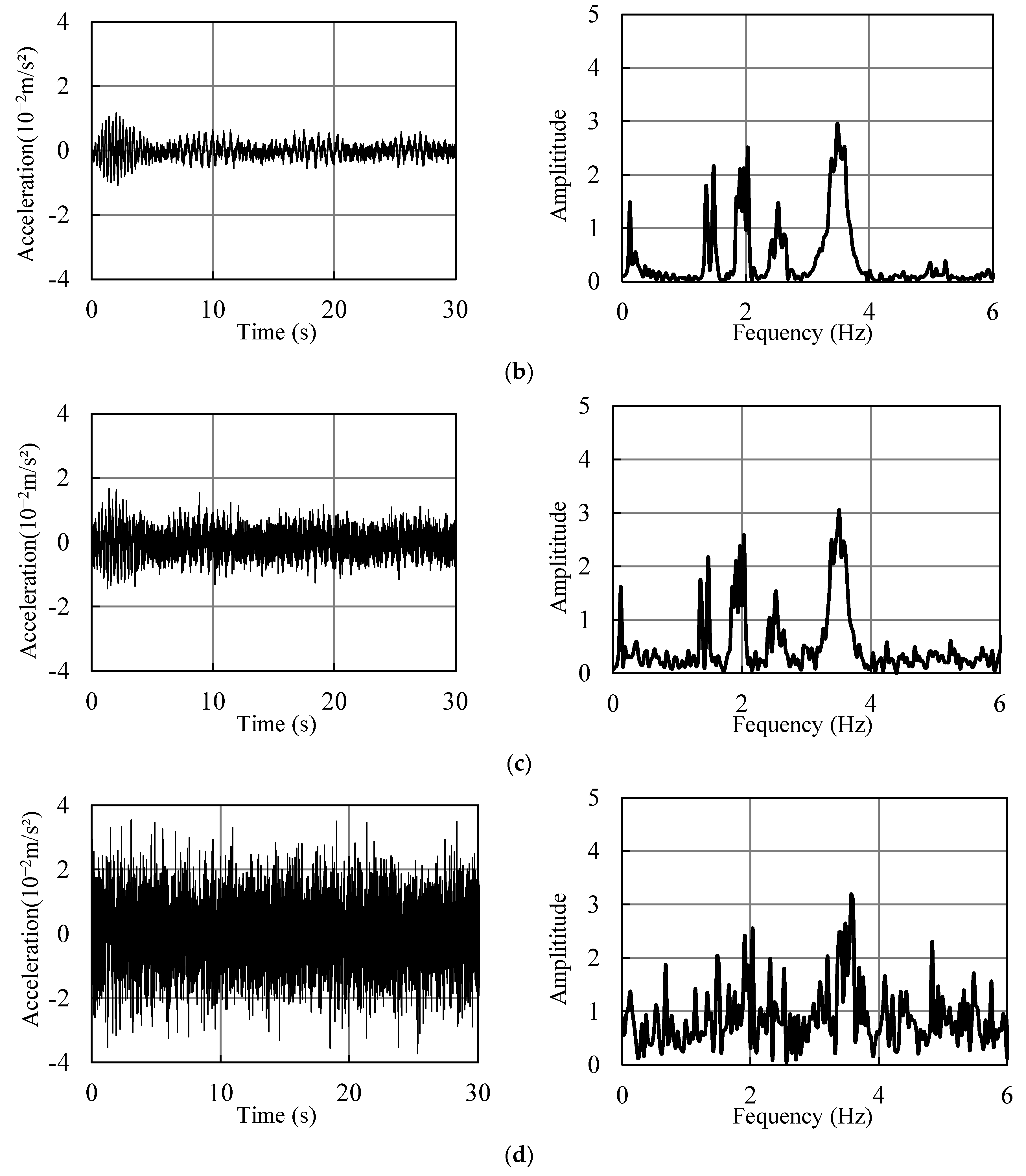
5.9. Influence of Interference Signal
6. Conclusions
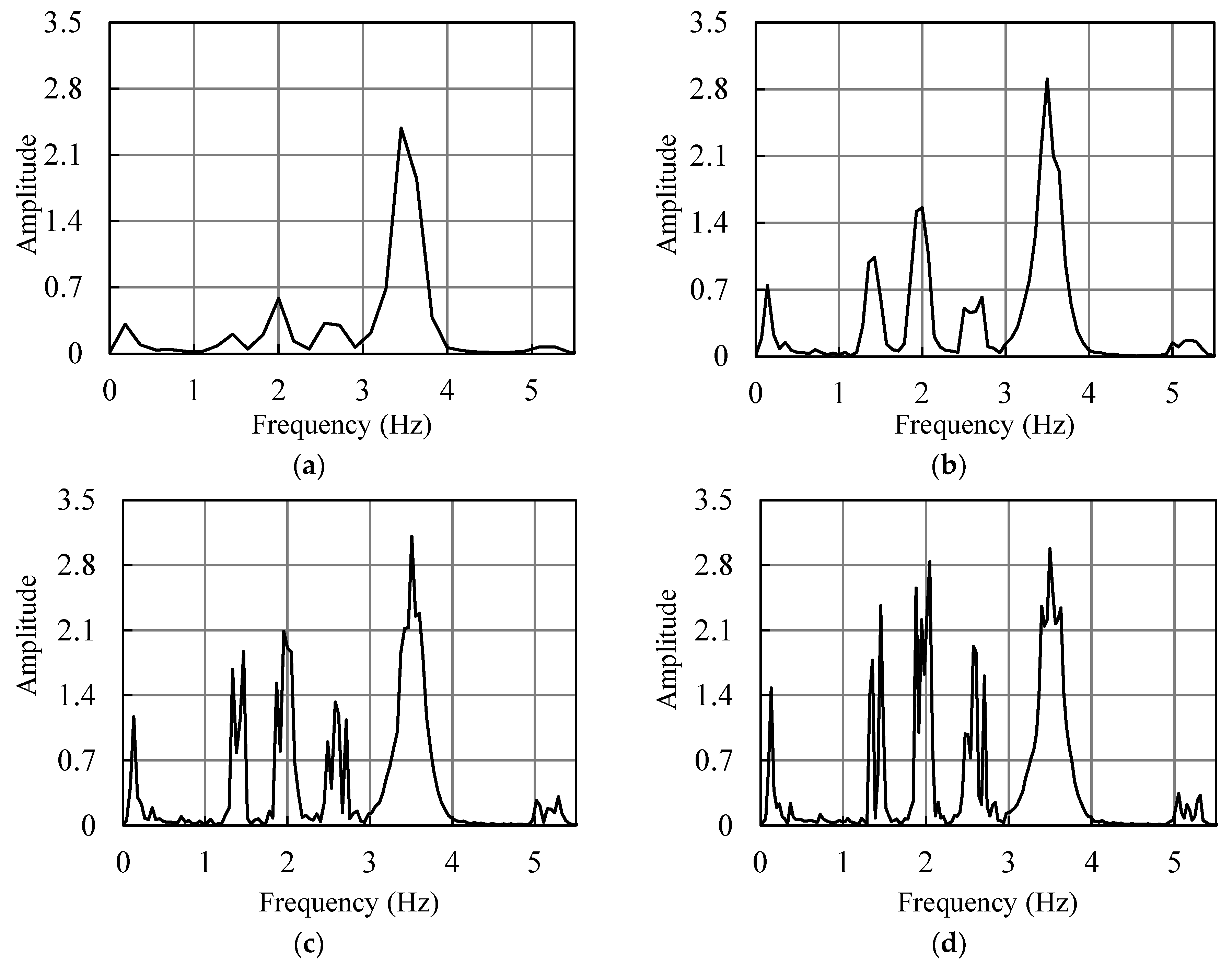
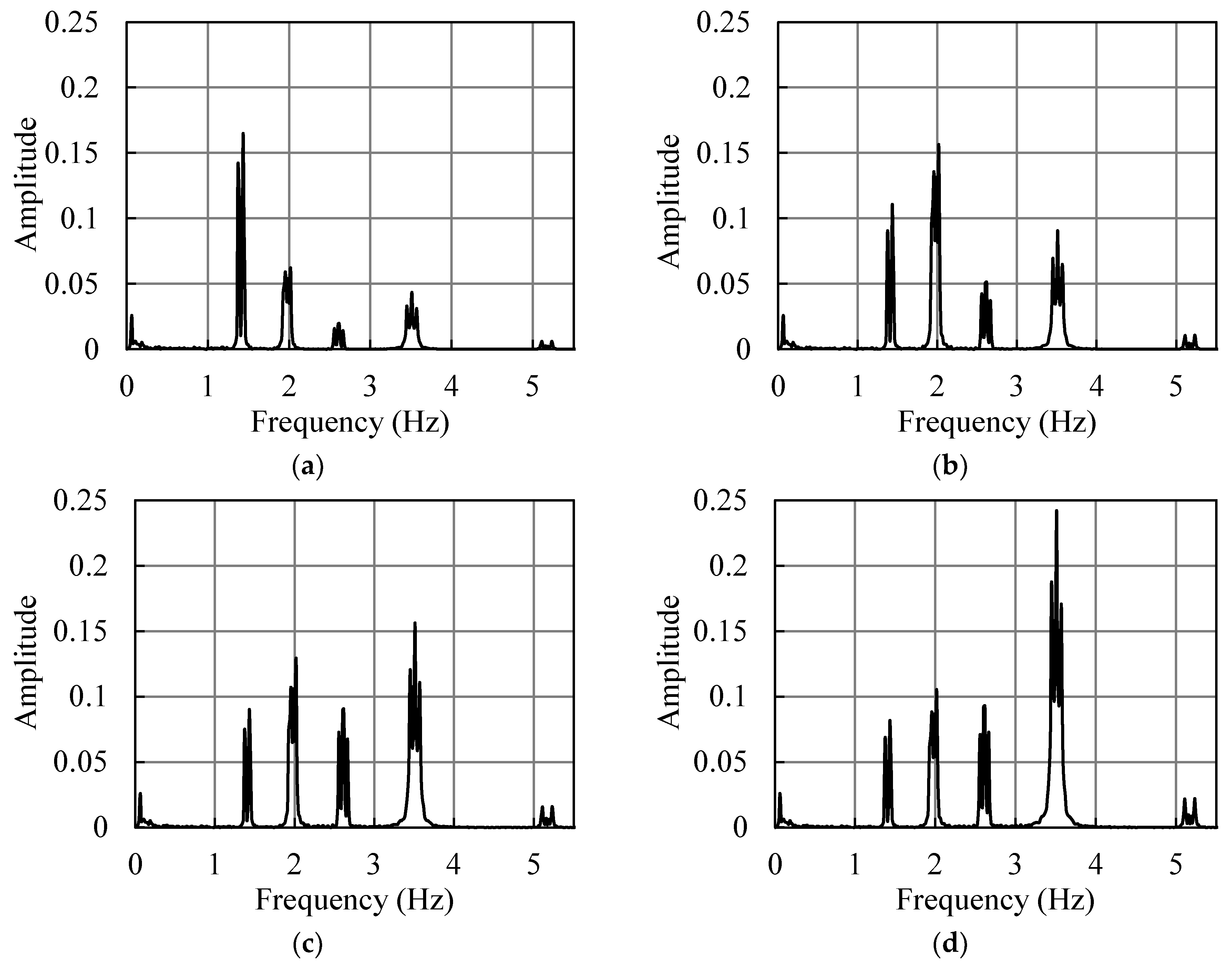
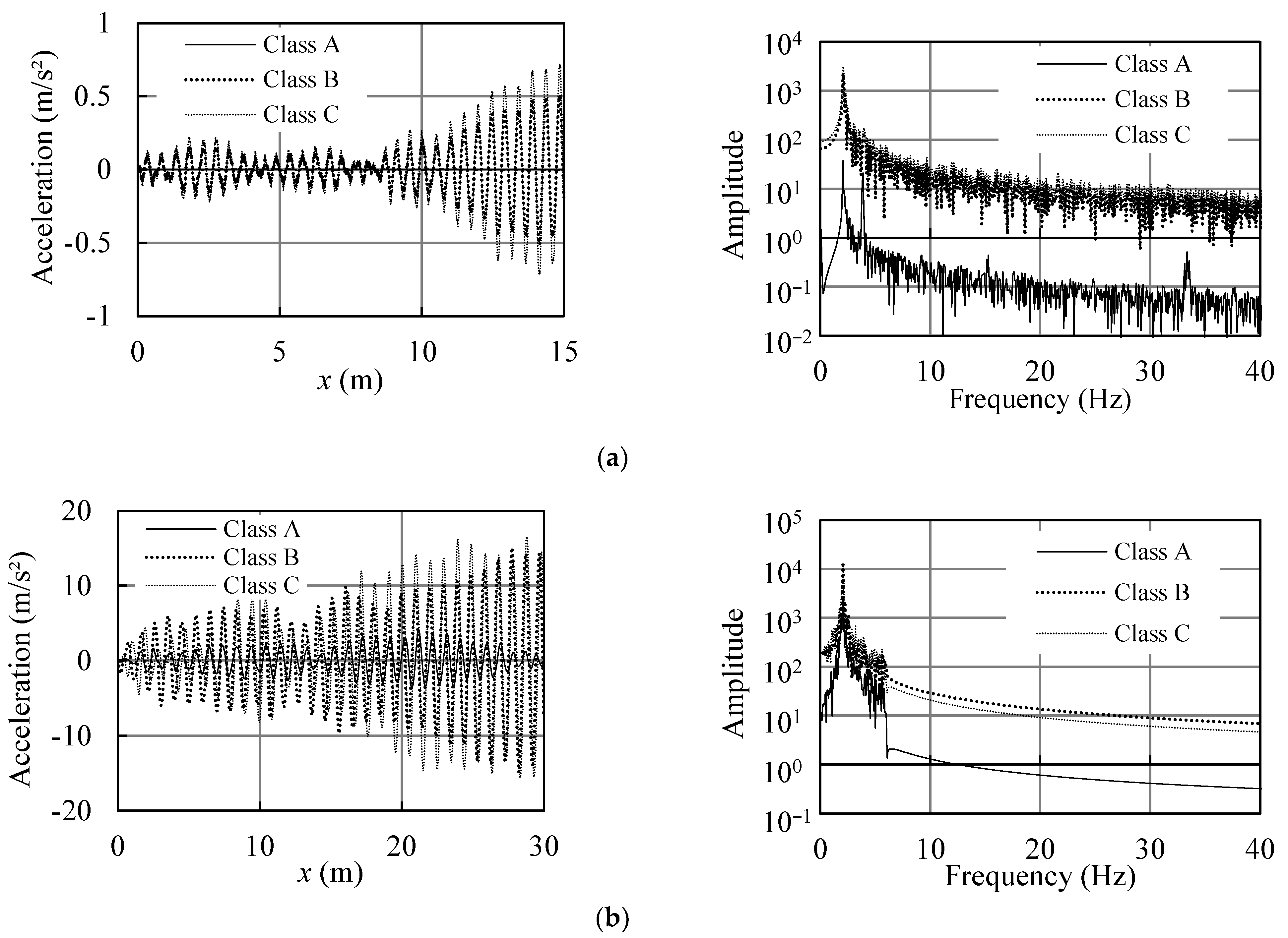
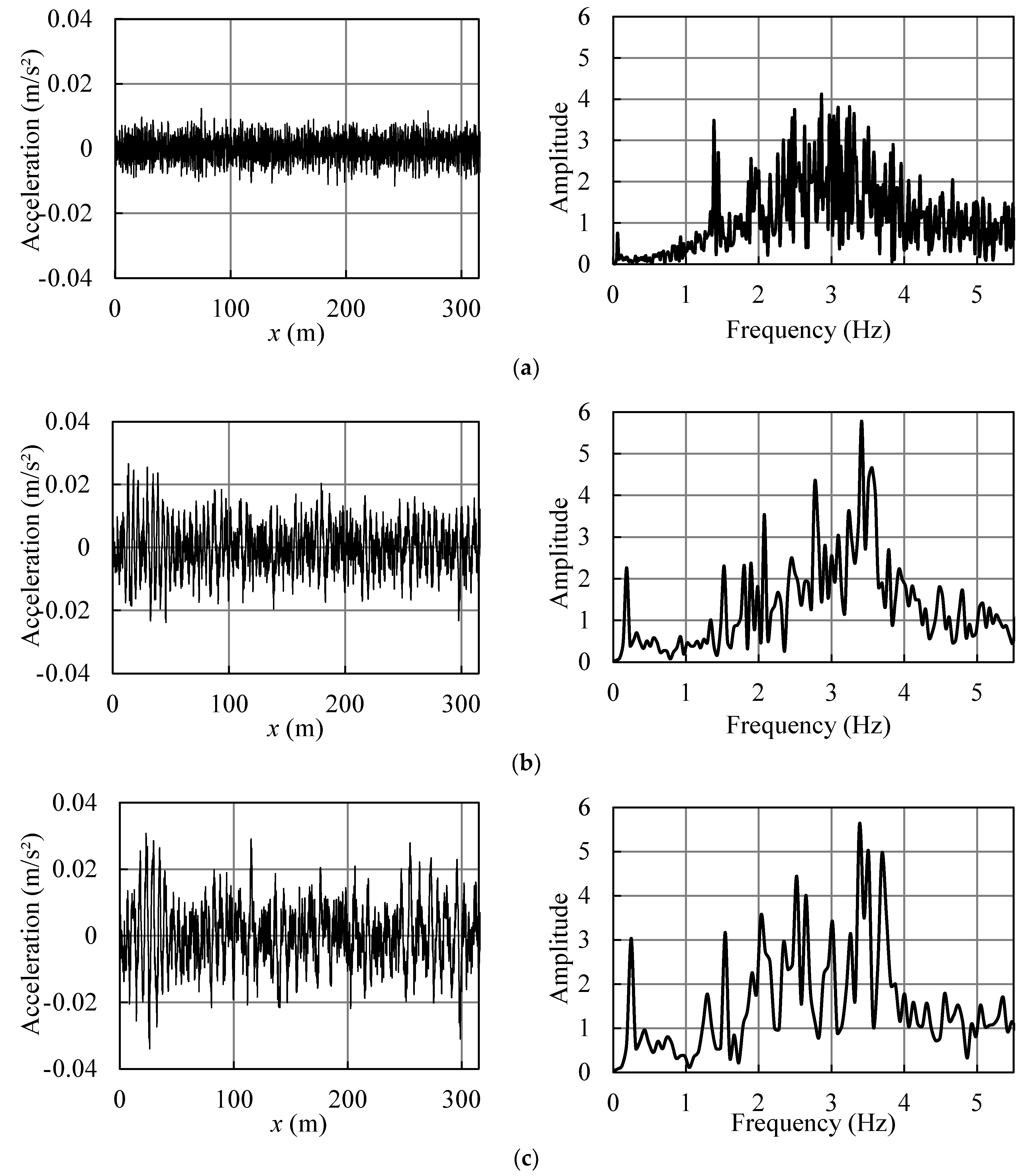
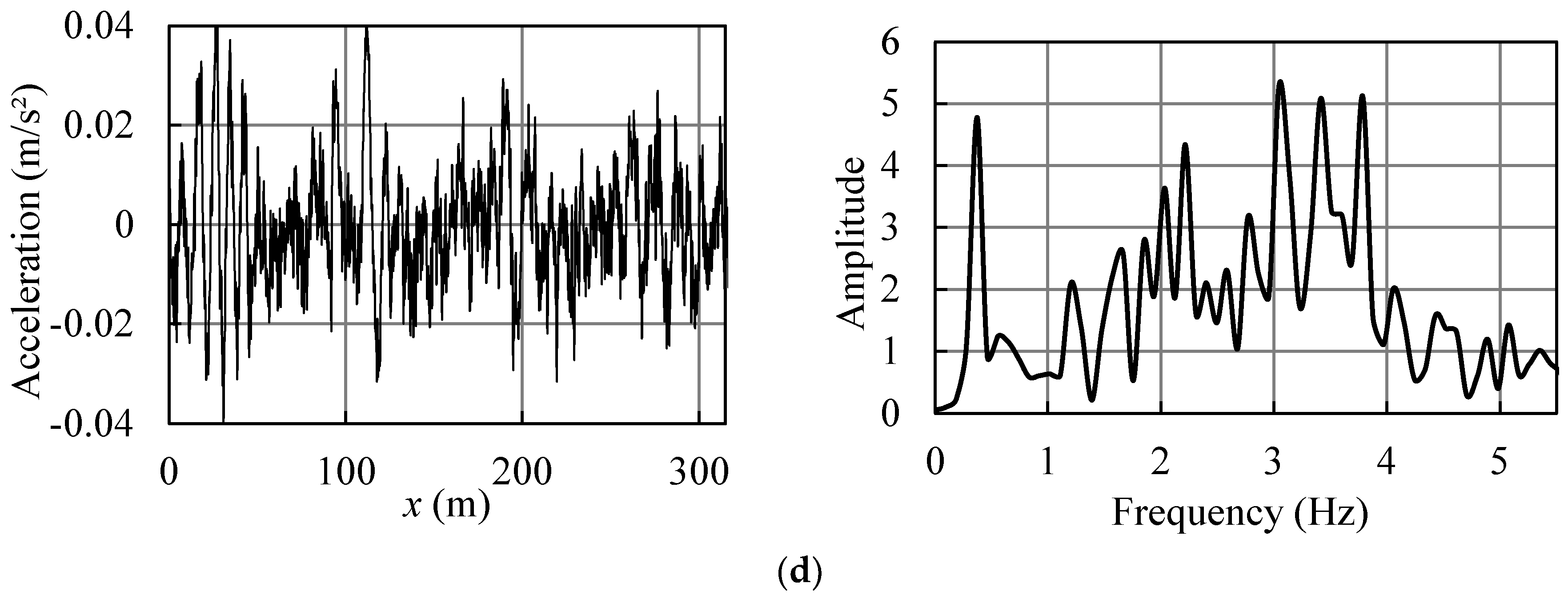
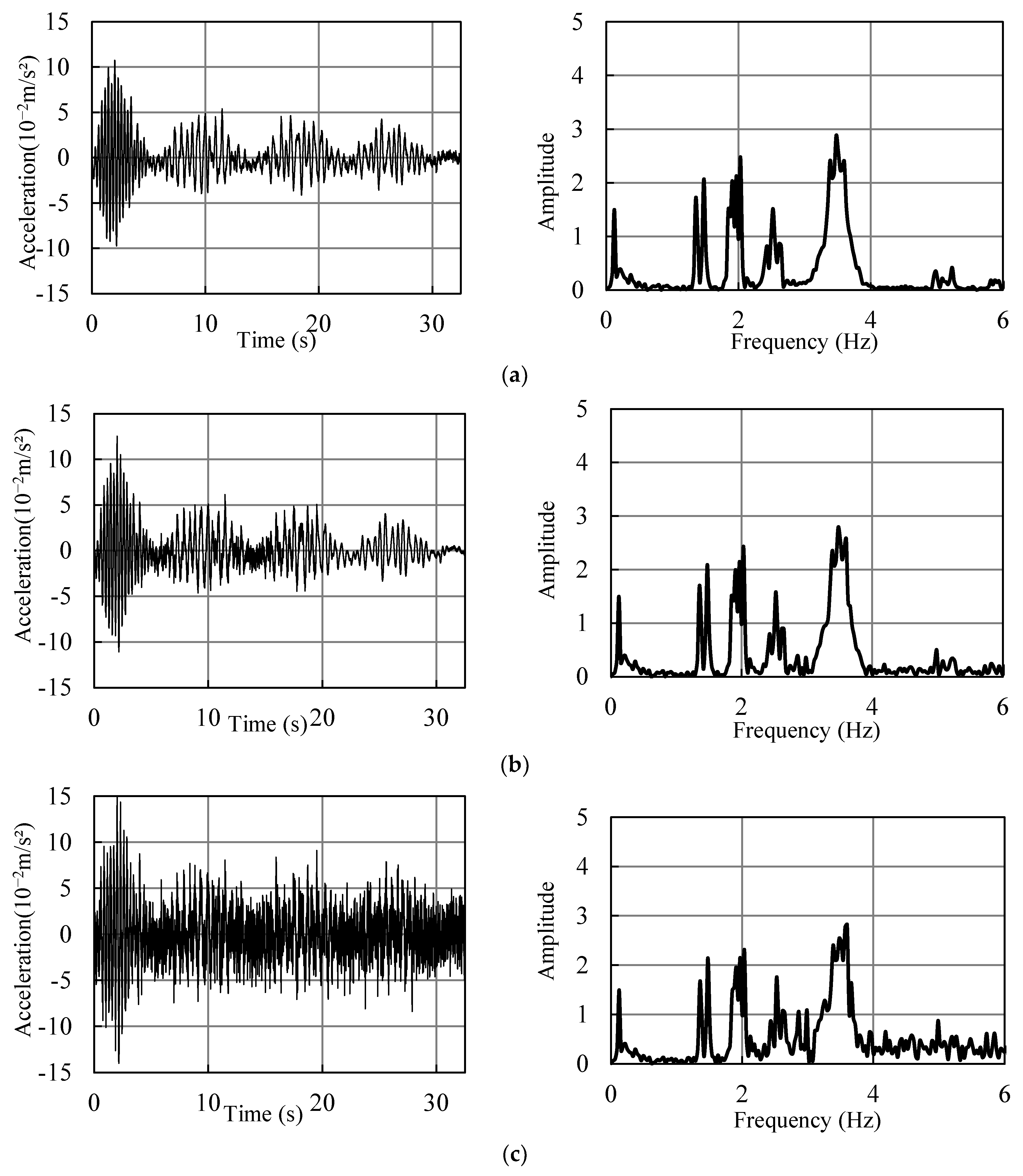
- In the ideal condition without interference, the indirect method exhibited a high level of accuracy in identifying the natural frequencies of the composite beam bridge, especially the fundamental frequency. In this ideal condition, the vehicle speed had a significant impact on the identification of the composite beam frequencies. Due to the influence of the vehicle’s driving frequency, the amplitude spectrum of the measured acceleration exhibited bifurcation peaks. Vehicle parameters also affected frequency identification, resulting in an increased amplitude around the vehicle’s natural frequency in the spectrogram. Vehicle damping, on the other hand, had a suppressing effect on the amplitude of all frequency orders. The interlayer shear stiffness of the composite beam and the magnitude of the prestress of the tendon can cause variations in the bridge frequency. The shear stiffness and the prestress value corresponding to fundamental frequencies after the changes can be identified using this method.
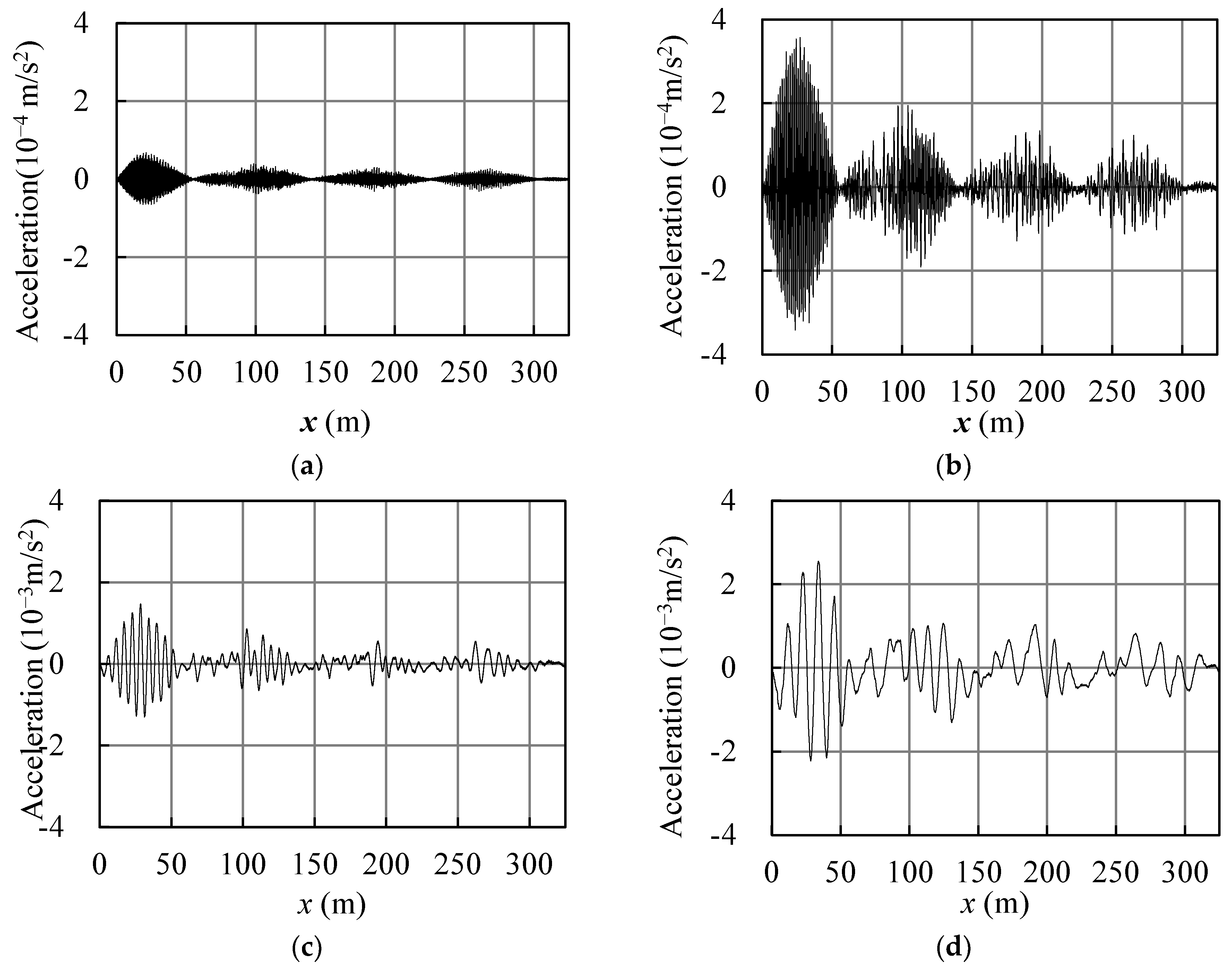
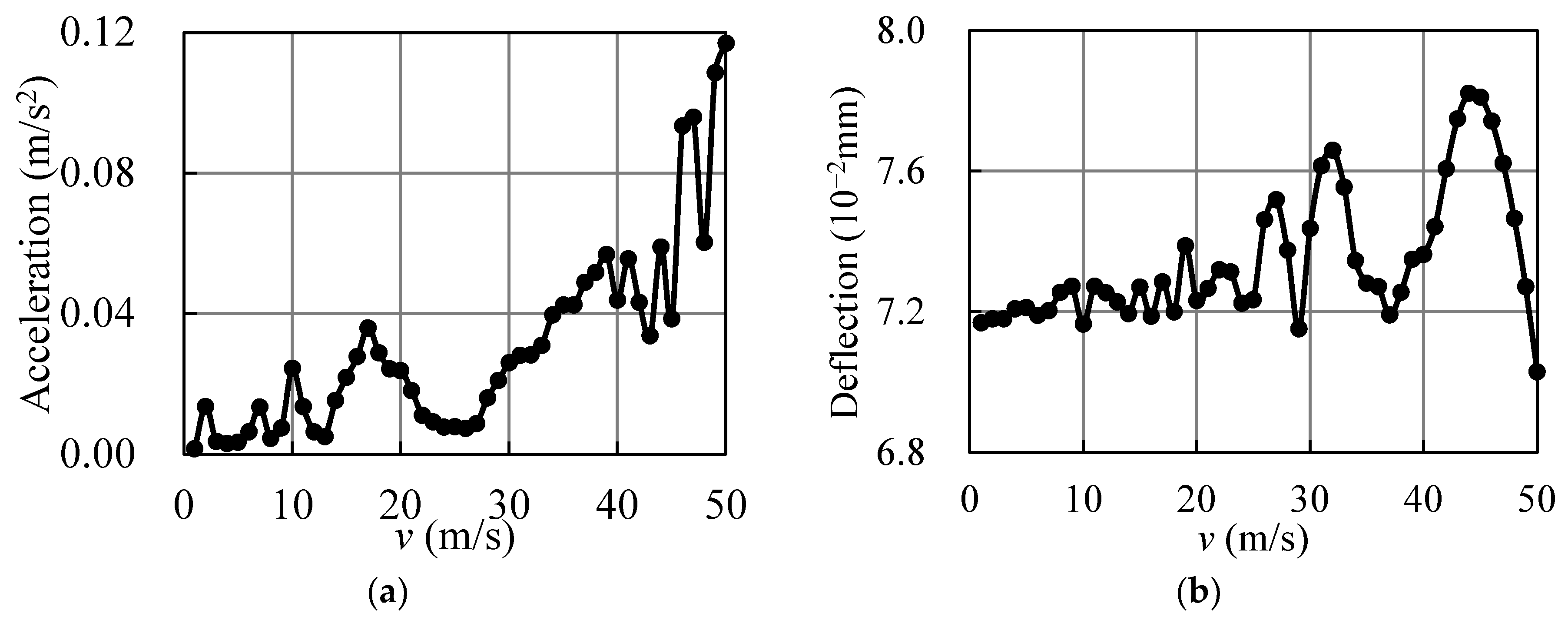
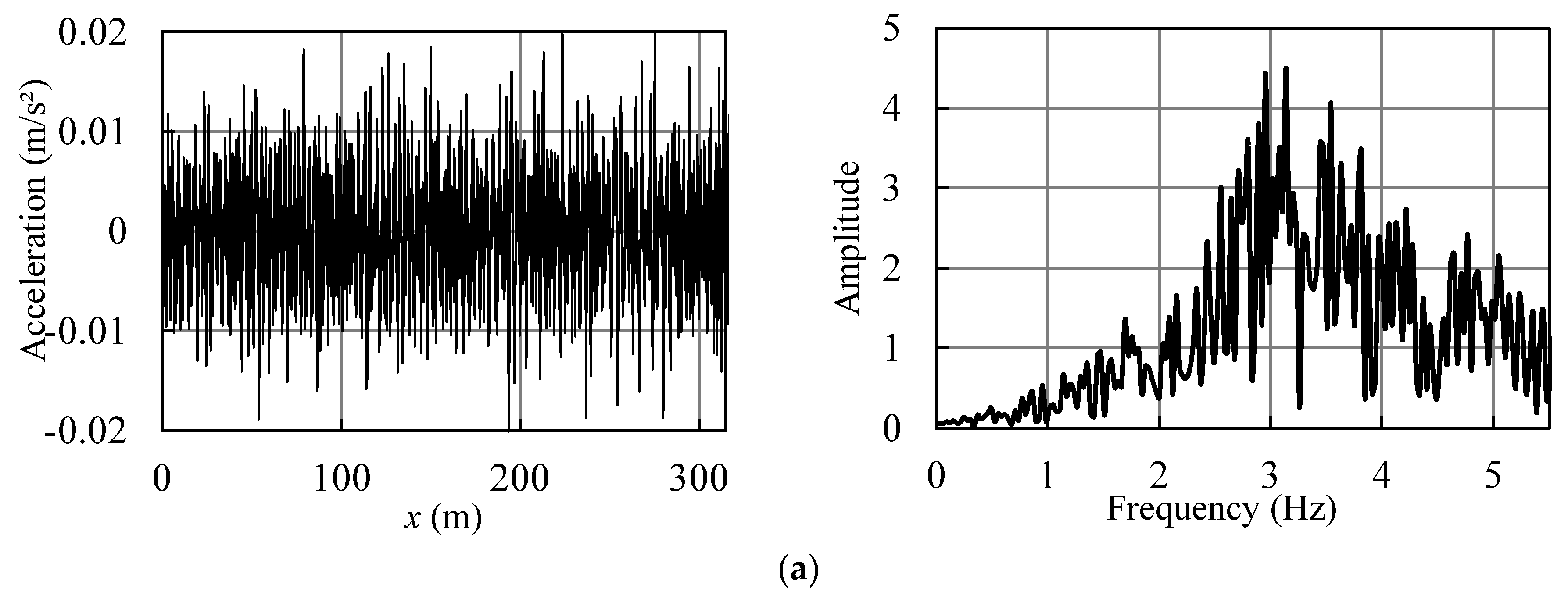
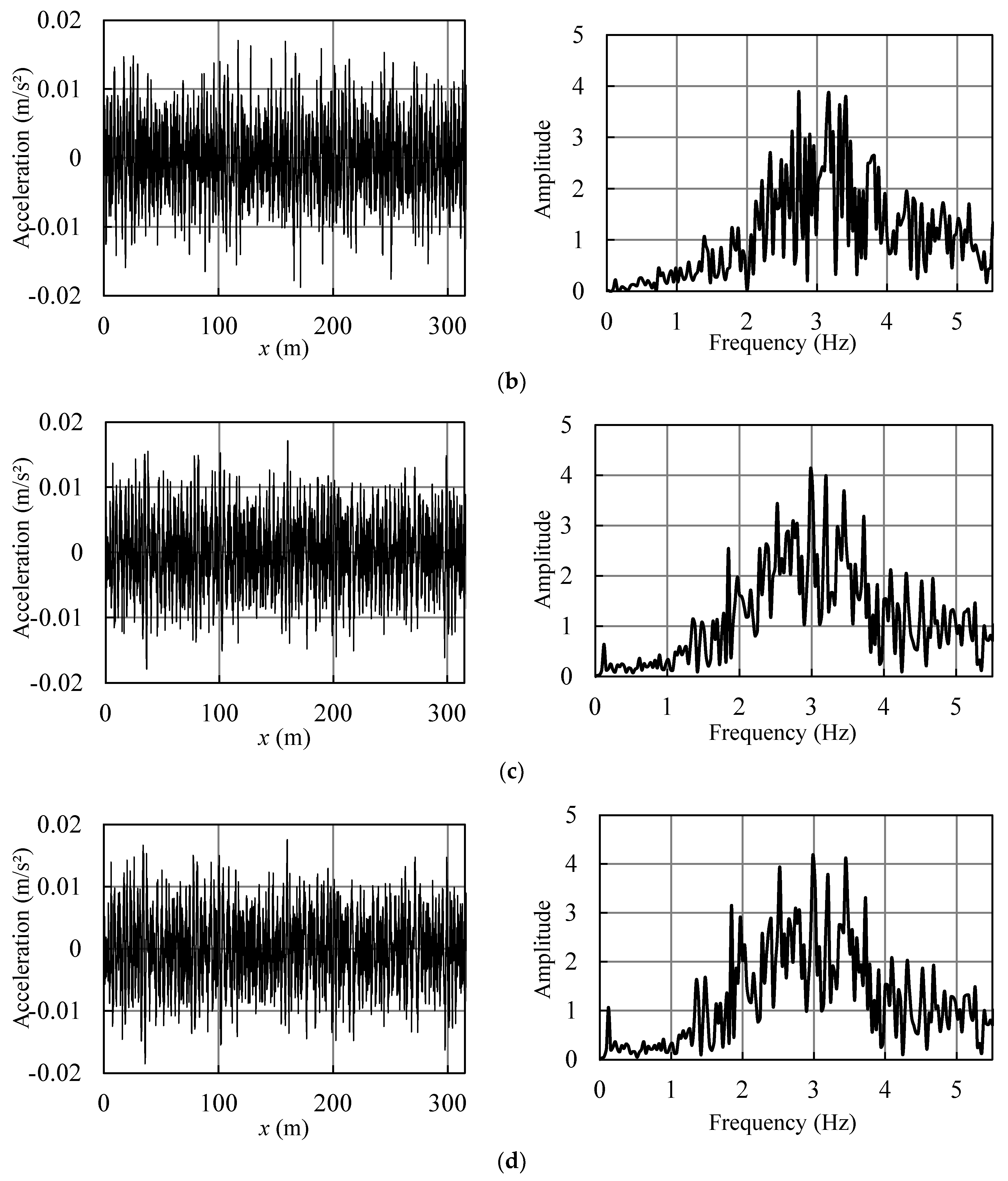
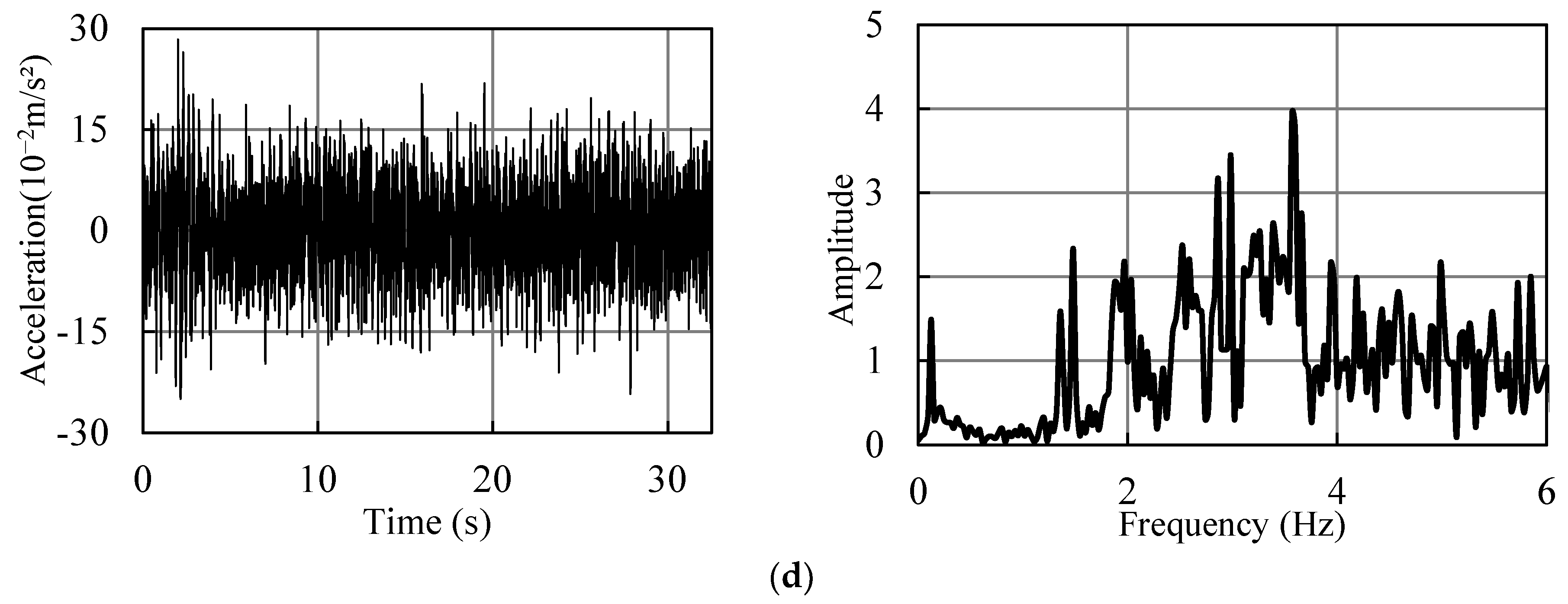
- The influence of road disturbances on frequency identification was such that the fundamental frequency can be identified when the road surface roughness is relatively low. Vehicles with larger masses contribute to improved frequency identification. As the vehicle speed increased, the amplitude of the acceleration spectrum also increased. However, the occurrence of bifurcation phenomena at the peak points became more pronounced, necessitating a comprehensive consideration when selecting an appropriate speed.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| ks | shear stiffness of the composite beam |
| m | mass per unit length |
| mv | vehicle mass |
| t | time |
| v | vehicle speed |
| kv | spring stiffness of the vehicle |
| ξv | damping ratio of the vehicle |
| I | moment of inertia |
| L | beam length |
| E | elastic modulus |
| deflection | |
| rotary angle | |
| i | nter-interface slip |
| axial force | |
| shear force | |
| bending moment | |
| system kinetic energy | |
| system potential energy | |
| virtual work by the external forces | |
| Rayleigh’s dissipation energy |
References
- Yang, Y.B.; Chang, K.C. Extraction of bridge frequencies from the dynamic response of a passing vehicle enhanced by the EMD technique. J. Sound Vib. 2009, 322, 718–739. [Google Scholar] [CrossRef]
- Kim, J.T.; Stubbs, N. Crack detection in beam-type structures using frequency data. J. Sound Vib. 2003, 259, 145–160. [Google Scholar] [CrossRef]
- Curadelli, R.O.; Riera, J.D.; Ambrosini, D.; Amani, M.G. Damage detection by means of structural damping identification. Eng. Struct. 2008, 30, 3497–3504. [Google Scholar] [CrossRef]
- Kim, J.T.; Ryu, Y.S.; Cho, H.M.; Stubbs, N. Damage identification in beam-type structures: Frequency-based method vs mode-shape-based method. Eng. Struct. 2003, 25, 57–67. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, G. Computationally-efficient homogenization and localization of unidirectional piezoelectric composites with partially cracked interface. Compos. Struct. 2020, 232, 111452. [Google Scholar] [CrossRef]
- Chen, Q.; Chen, W.; Wang, G. Fully-coupled electro-magneto-elastic behavior of unidirectional multiphased composites via finite-volume homogenization. Mech. Mater. 2021, 154, 103553. [Google Scholar] [CrossRef]
- Carden, E.P.; Fanning, P. Vibration based condition monitoring: A review. Struct. Health Monit. Int. J. 2004, 3, 355–377. [Google Scholar] [CrossRef]
- Alvandi, A.; Cremona, C. Assessment of vibration-based damage identification techniques. J. Sound Vib. 2006, 292, 179–202. [Google Scholar] [CrossRef]
- Farrar, C.R.; Doebling, S.W.; Nix, D.A. Vibration-based structural damage identification. Philos. Trans. R. Soc. Lond. Ser. A-Math. Phys. Eng. Sci. 2001, 359, 131–149. [Google Scholar] [CrossRef]
- Wu, R.; Xu, R.; Wang, G. Frequency domain homogenization of effective and localized viscoelastic response of unidirectional composites with imperfect interfaces. Compos. Struct. 2022, 301, 116226. [Google Scholar] [CrossRef]
- Fang, S.-E.; Perera, R. Power mode shapes for early damage detection in linear structures. J. Sound Vib. 2009, 324, 40–56. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, L.; Xiang, Z. Damage detection by mode shape squares extracted from a passing vehicle. J. Sound Vib. 2012, 331, 291–307. [Google Scholar] [CrossRef]
- Yang, Y.B.; Lin, C.W.; Yau, J.D. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Yang, Y.B.; Lin, C.W. Vehicle–bridge interaction dynamics and potential applications. J. Sound Vib. 2005, 284, 205–226. [Google Scholar] [CrossRef]
- Yang, Y.B.; Chang, K.C.; Li, Y.C. Filtering techniques for extracting bridge frequencies from a test vehicle moving over the bridge. Eng. Struct. 2013, 48, 353–362. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Obrien, E.J. Identification of bridge mode shapes using Short Time Frequency Domain Decomposition of the responses measured in a passing vehicle. Eng. Struct. 2014, 81, 386–397. [Google Scholar] [CrossRef]
- McGetrick, P.J.; Gonzalez, A.; Obrien, E.J. Theoretical investigation of the use of a moving vehicle to identify bridge dynamic parameters. Insight 2009, 51, 433–438. [Google Scholar] [CrossRef]
- Pesterev, A.V.; Yang, B.; Bergman, L.A.; Tan, C.A. Response of elastic continuum carrying multiple moving oscillators. J. Eng. Mech.-ASCE 2001, 127, 260–265. [Google Scholar] [CrossRef]
- Yang, Y.B.; Wu, Y.S. A versatile element for analyzing vehicle-bridge interaction response. Eng. Struct. 2001, 23, 452–469. [Google Scholar] [CrossRef]
- Xia, H.; Xu, Y.L.; Chan, T.H.T. Dynamic interaction of long suspension bridges with running trains. J. Sound Vib. 2000, 237, 263–280. [Google Scholar] [CrossRef]
- Yang, Y.B.; Chang, C.H.; Yau, J.D. An element for analysing vehicle-bridge systems considering vehicle’s pitching effect. Int. J. Numer. Methods Eng. 1999, 46, 1031–1047. [Google Scholar] [CrossRef]
- Zhang, L.; Xu, Z.; Gao, M.; Xu, R.; Wang, G. Static, dynamic and buckling responses of random functionally graded beams reinforced by graphene platelets. Eng. Struct. 2023, 291, 116476. [Google Scholar] [CrossRef]
- Wu, R.; Xu, R.; Wang, G. Multiscale viscoelastic analysis of FRP-strengthened concrete beams. Int. J. Mech. Sci. 2023, 253, 108396. [Google Scholar] [CrossRef]
- Wu, R.; Xu, R.; Wang, G. Modeling and prediction of short/long term mechanical behavior of FRP-strengthened slabs using innovative composite finite elements. Eng. Struct. 2023, 281, 115727. [Google Scholar] [CrossRef]
- Lin, J.-P.; Wang, G.; Bao, G.; Xu, R. Stiffness matrix for the analysis and design of partial-interaction composite beams. Constr. Build. Mater. 2017, 156, 761–772. [Google Scholar] [CrossRef]
- Lin, J.-P.; Wang, G.; Xu, R. Variational Principles and Explicit Finite-Element Formulations for the Dynamic Analysis of Partial-Interaction Composite Beams. J. Eng. Mech. 2020, 146, 04020055. [Google Scholar] [CrossRef]
- Pan, J. Vehicle-Bridge Interaction Analysis by the Symplectic Method. Master’s Thesis, Zhejiang University, Hangzhou, China, 2014. [Google Scholar]
- ISO 8608; Mechanical Vibration-Road Surface Profiles-Reporting of Measured Data. International Standardization Organization: Geneva, Switzerland, 2006.
- Yang, Y.B.; Li, Y.C.; Chang, K.C. Effect of road surface roughness on the response of a moving vehicle for identification of bridge frequencies. Interact. Multiscale Mech. 2012, 5, 347–368. [Google Scholar] [CrossRef]
- Chen, X. The Vehicle-Bridge Interaction Analysis of Corrugated Steel Web Box Girder Based on Contact-Constraint Method. Master’s Thesis, Chongqing University, Chongqing, China, 2019. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order | Test Values | FE (Free Vibration) | FE (Force Vibration-Bridge) | FE (Force Vibration-Vehicle) | Relative Error-Free Vibration (%) | Relative Error-Vehicle (%) |
|---|---|---|---|---|---|---|
| 1 | 1.39 | 1.40 | 1.38 | 1.40 | 1.06 | 0.72 |
| 2 | 1.83 | 1.98 | 1.97 | 1.97 | 7.93 | 7.61 |
| 3 | 2.39 | 2.61 | 2.58 | 2.58 | 9.12 | 8.14 |
| 4 | 3.39 | 3.51 | 3.51 | 3.52 | 3.55 | 3.77 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wu, T.; Chen, B.; Chen, Y.; Hu, B.; Lin, J.-P. Identification of Dynamic Vibration Parameters of Partial Interaction Composite Beam Bridges Using Moving Vehicle. Appl. Sci. 2023, 13, 12534. https://doi.org/10.3390/app132212534
Wu T, Chen B, Chen Y, Hu B, Lin J-P. Identification of Dynamic Vibration Parameters of Partial Interaction Composite Beam Bridges Using Moving Vehicle. Applied Sciences. 2023; 13(22):12534. https://doi.org/10.3390/app132212534
Chicago/Turabian StyleWu, Tao, Bowen Chen, Yong Chen, Biao Hu, and Jian-Ping Lin. 2023. "Identification of Dynamic Vibration Parameters of Partial Interaction Composite Beam Bridges Using Moving Vehicle" Applied Sciences 13, no. 22: 12534. https://doi.org/10.3390/app132212534
APA StyleWu, T., Chen, B., Chen, Y., Hu, B., & Lin, J.-P. (2023). Identification of Dynamic Vibration Parameters of Partial Interaction Composite Beam Bridges Using Moving Vehicle. Applied Sciences, 13(22), 12534. https://doi.org/10.3390/app132212534