
Research on Variable-Step-Size Adaptive Filter Algorithm with a Momentum Term

 ,
,
Abstract
:1. Introduction
2. Algorithm Principle
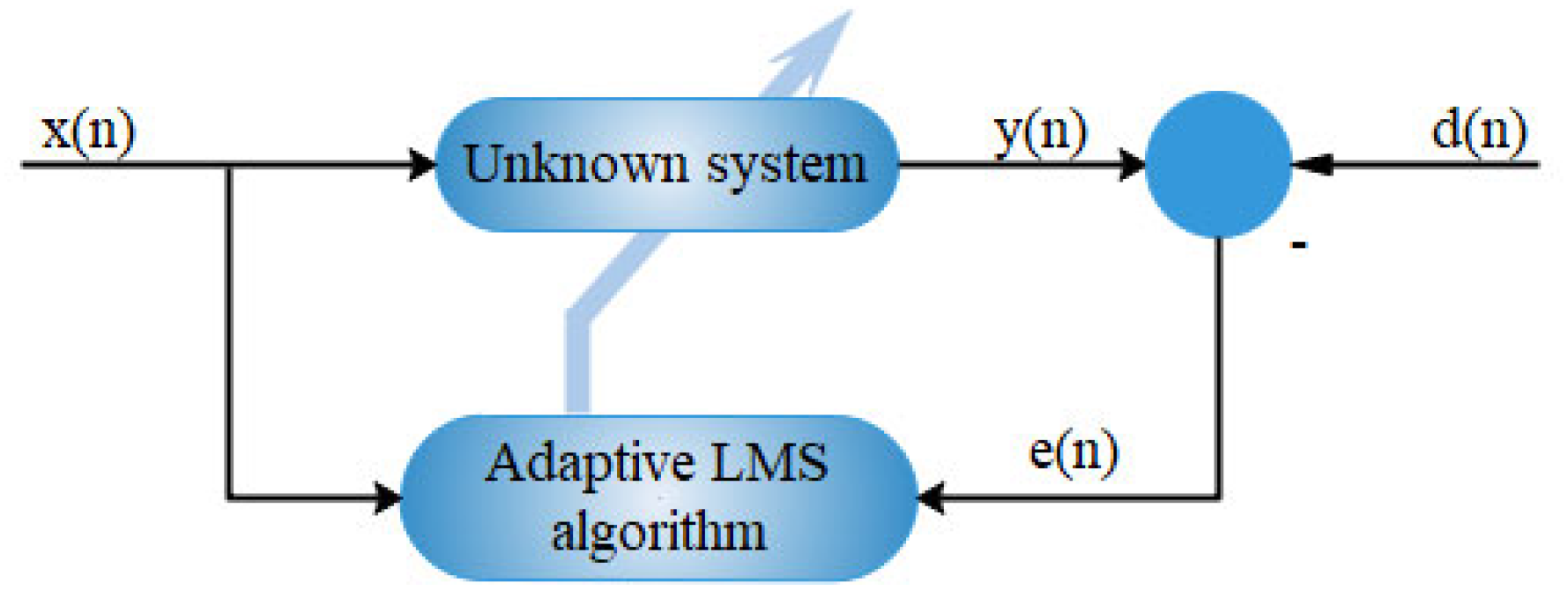
2.1. Principle of LMS Algorithm
- (1)
- Determine the parameters: the global step size parameter β and the number of taps in the filter.
- (2)
- Initialize the initial value of the filter.
- (3)
- Algorithm operation process:
- Filter output:
- Error signal:
- Weight coefficient update:
2.2. Principle of Variable-Step LMS Algorithm
2.3. Principle of Variable-Step LMS Algorithm Based on Incidental Momentum Term
- (1)
- Determine the parameter: the number of taps for the filter.
- (2)
- Initialize the initial value of the filter.
- (3)
- Algorithm operation process:
- Filter output:
- Error signal:
- Step size adjustment:
- Weight coefficient update:
3. Numerical Simulation and Verification
3.1. Determine the Optimal Algorithm Parameters
3.2. Example Validation
3.3. Experimental Steps and Results
4. Conclusions
- (1)
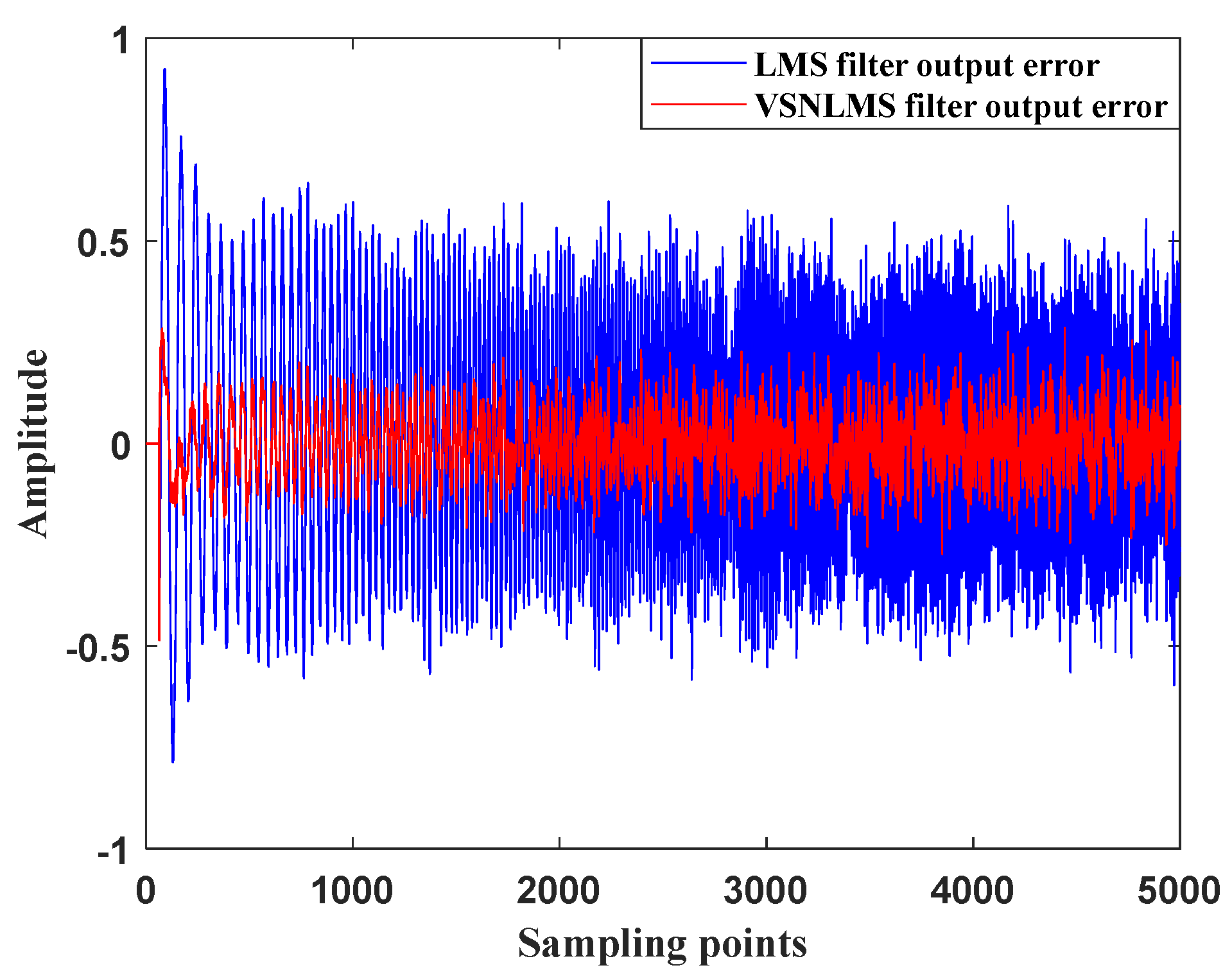
- Based on the LMS algorithm, a variable-step-size normalization adaptive filter algorithm known as VSNLMS is developed to further minimize convergence errors in adaptive filtering. This algorithm utilizes the logistic function to establish a function model of step size varying with the error. The filtering results of the VSNLMS algorithm are compared to those of the LMS algorithm for wideband signals with noise. It is observed that the VSNLMS algorithm achieves significantly smaller convergence errors. The effects of the VSNLMS algorithm parameters (α, β, and γ) on the filtering results are investigated using the control variable method. On this basis, the optimal parameter values are determined.
- (2)
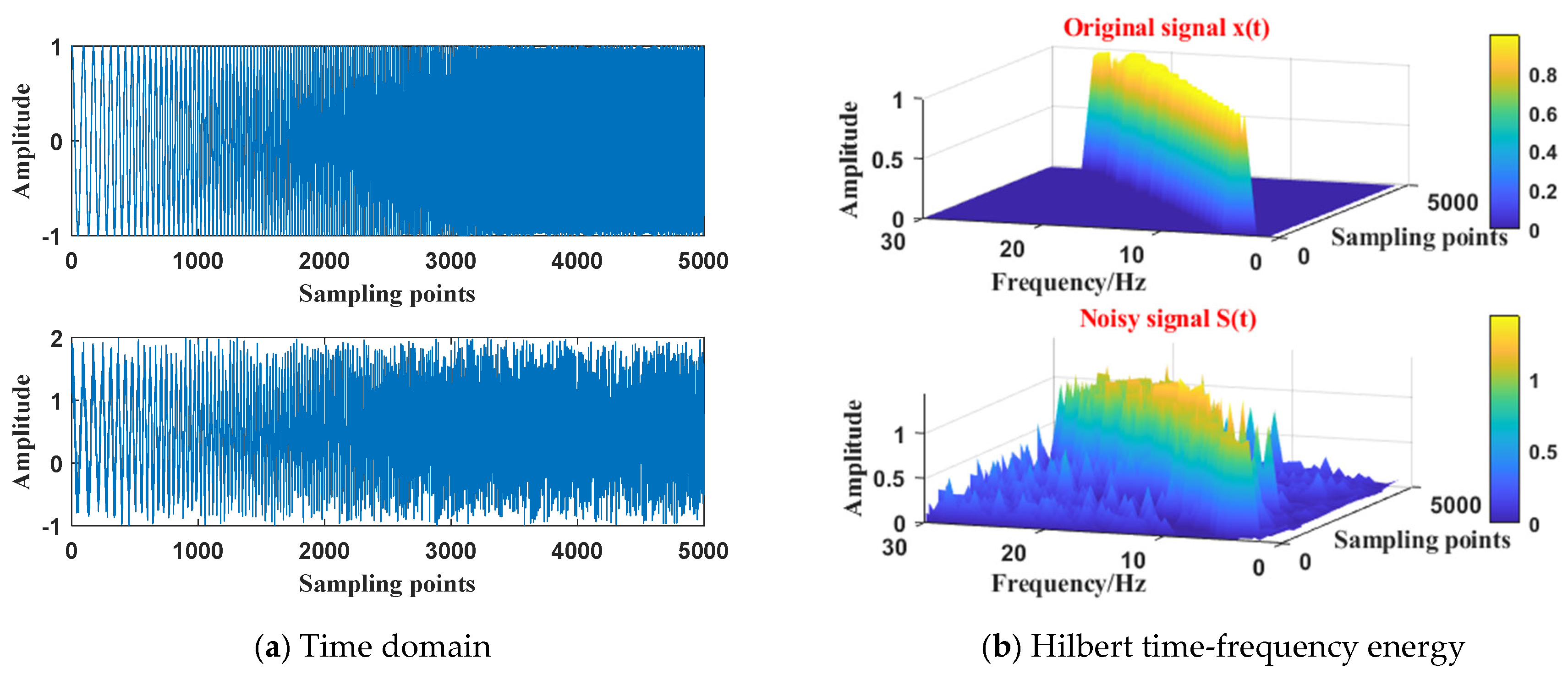
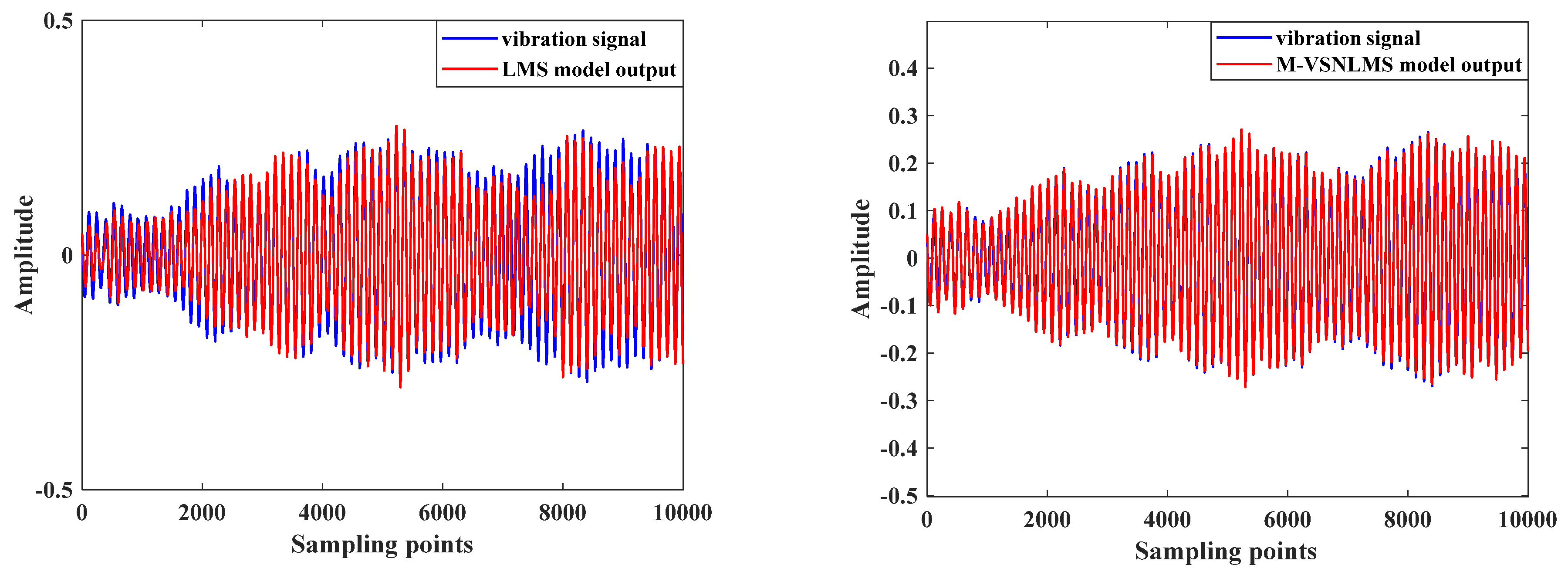
- To accelerate the convergence of the algorithm, a momentum term θ is introduced into the VSNLMS algorithm, resulting in the modified VSNLMS (M-VSNLMS) algorithm. This term consists of a forgetting factor and a momentum term of weight increment from the previous moment. This modification enables the algorithm to anticipate changes in the error trend, leading to faster convergence. The effects of the M-VSNLMS algorithm parameter θ on the filtering results are investigated based on the above conclusion, and the optimal parameter values are determined. Moreover, the filtering results of the M-VSNLMS algorithm are compared to those of the LMS algorithm for wideband signals containing noise. The results demonstrate that the M-VSNLMS algorithm achieves signal reconstruction and effective noise suppression in the time domain, frequency domain, and energy distribution. Furthermore, it exhibits a significantly faster convergence rate compared to that of the LMS algorithm.
- (3)
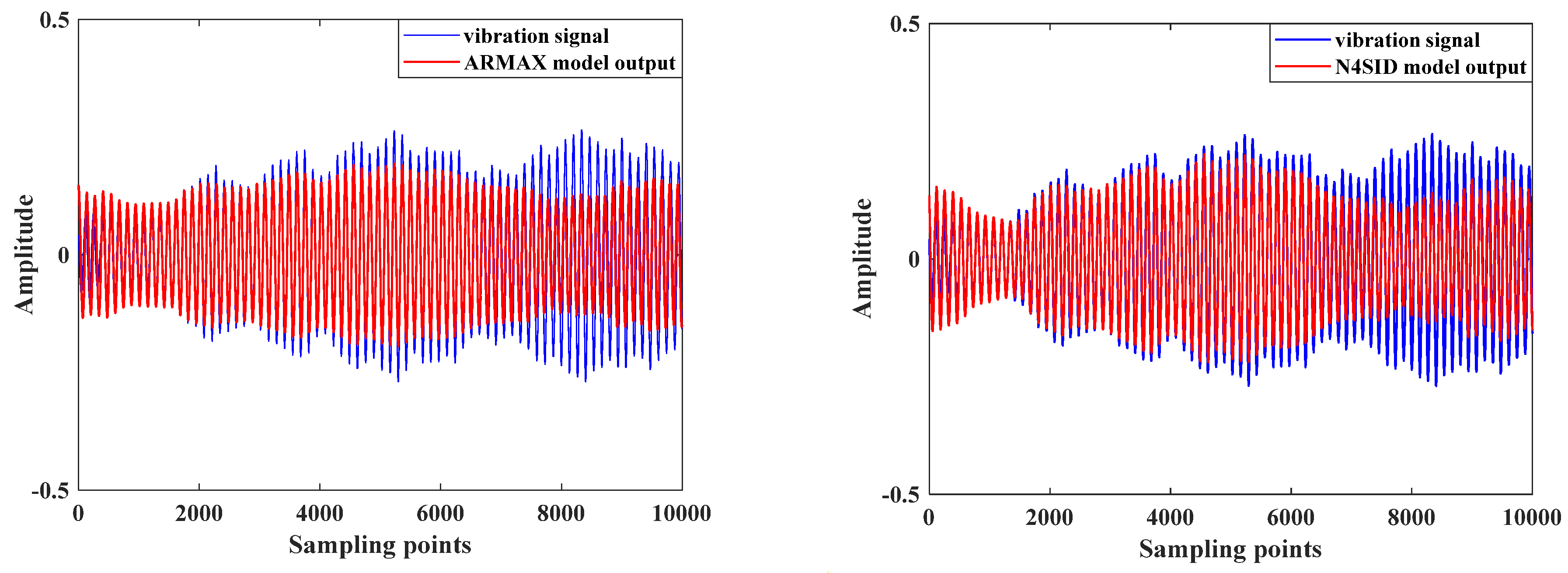
- The M-VSNLMS algorithm is utilized to perform system identification on a noisy dynamic system mathematical model. The results show that the proposed algorithm can accurately identify the mathematical model with an accuracy of over 97%, while also suppressing the noise components in the logarithmic model by over 99%. Real-time vibration data fitting experiments were conducted in the aeroelastic laboratory of CARDC. The data fitting capabilities and mathematical model complexity of four algorithms, ARMAX, N4SID, LMS, and M-VSNLMS, were compared, indicating that M-VSNLMS has a higher real-time data fitting accuracy and lower-complexity mathematical models.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| LMS | Least Mean Square |
| ARMAX | Auto-Regressive Moving Average with X input |
| N4-SID | N4-Subspace identification algorithm |
| KLMS | Kernel Least Mean Square |
| PID | Proportional Integral Differential |
| BP | Back Propagation |
| M-VSNLMS | Momentum-Variable Step Normalization LMS |
| CARDC | China Aerodynamics Research and Development Center |
References
- Shen, F. Adaptive Signal Processing; Xi’an University of Electronic Science and Technology Press: Xi’an, China, 2001. [Google Scholar]
- Wang, B.; Li, H.; Gao, S.; Zhang, M.; Xu, C. A variable step size minimum average p-norm adaptive filtering algorithm. J. Electron. Inf. Technol. 2022, 44, 661–667. [Google Scholar]
- Widrow, B.; Hoff, M.E. Adaptive switching circuits. In Neurocomputing: Foundations of Research; MIT Press: Cambridge, MA, USA, 1988. [Google Scholar]
- Xie, B.; Wang, N. Simulation research based on improved BP LMS adaptive filter algorithm. Comput. Digit. Eng. 2022, 50, 6. [Google Scholar]
- Yasukawa, H.; Shimada, S.; Furukawa, I. Acoustic echo canceller with high speech quality. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Dallas, TX, USA, 6–9 April 1987; pp. 2125–2128. [Google Scholar]
- Widrow, B.; Mccool, J.; Ball, M. The complex LMS algorithm. Proc. IEEE 2005, 63, 719–720. [Google Scholar] [CrossRef]
- Wang, B.; Chao, P.; Zhang, W.; Wang, J.; Jin, P.; Xie, F. Variable Step Size LMP Adaptive Filtering Algorithm Based on Improved Tanh Function. CN202111415232. X 25 February 2022. [Google Scholar]
- Bouboulis, P.; Theodoridis, S.; Mavroforakis, M. The augmented complex kernel LMS. IEEE Trans. Signal Process. 2012, 60, 4962–4967. [Google Scholar] [CrossRef]
- Zhang, S.; Sun, L.; Wang, X. The Application of a New Variable Step Size ELMS Algorithm in Noise Cancellation. J. Terahertz Sci. Electron. Inf. Technol. 2022. [Google Scholar]
- Dai, C.; Fang, M. Vehicle mounted ANC simulation based on adaptive filtering algorithm. Model. Simul. 2023, 12, 366–379. [Google Scholar] [CrossRef]
- Wu, L.; Nie, Y.; Zhang, Y.; He, S.; Zhao, Y. Adaptive filtering denoising method based on variational mode decomposition. J. Electron. Sci. 2021, 49, 1457–1465. [Google Scholar]
- Tobar, F.A.; Kuh, A.; Mandic, D.P. A Novel augmented complex valued kernel LMS. In Proceedings of the 2012 IEEE 7th Sensor Array and Multichannel Signal Processing Workshop (SAM), Hoboken, NJ, USA, 17–20 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 473–476. [Google Scholar]
- Dai, Y.; Zhang, L.; Zhao, Z.; Shen, X. Wind-Tunnel Evaluation for an Active Sting Damper Using Multi-modal Neural Networks. AIAA J. 2020, 58, 1939–1948. [Google Scholar] [CrossRef]
- Zhang, L.; Dai, Y.; Kou, X.; Yu, L.; Lu, B.; Shen, X. Research on an Active Pitching Damper for Transonic Wind Tunnel Tests. Aerosp. Sci. Technol. 2019, 94, 105364. [Google Scholar] [CrossRef]
- Zhan, G.; Wu, Z. A New Variable Step LMS Adaptive Filtering Algorithm. J. Nav. Eng. Univ. 2006, 36, 109–112. [Google Scholar]
- Lin, J.; Zheng, Y.B. Vibration suppression control of smart piezoelectric rotating truss structure by parallel neuro-fuzzy control with genetic algorithm tuning. J. Sound Vib. 2012, 331, 3677–3694. [Google Scholar] [CrossRef]
- Zhang, X. Kernel Adaptive Filtering Algorithm and Its Application in Noise Cancellation and Channel Equalization. Xihua University: Chengdu, China, 2017. [Google Scholar]
- Qian, F.; Huang, J.; Qin, X. Research on system identification algorithm based on robust optimization. Acta Autom. Sin. 2014, 40, 988–993. [Google Scholar]
- Feng, D. Research on complexity, convergence and computational efficiency of system identification algorithm is published first. Control. Decis. Mak. 2016, 31, 1729–1741. [Google Scholar]
- Ji, Z. Comparison and simulation of system identification algorithms based on correlation analysis. Comput. Knowl. Technol. Acad. Exch. 2016, 12, 253–254. [Google Scholar]
- Liu, W.; Zhou, M.D.; Wen, Z.Q.; Yao, Z.; Liu, Y.; Wang, S.H.; Cui, X.C.; Li, X.; Liang, B.; Jia, Z.Y. An Active Damping Vibration Control System for Wind Tunnel Models. Chin. J. Aeronaut. 2019, 32, 2109–2120. [Google Scholar] [CrossRef]
- Dai, Y.K.; Shen, X.; Zhang, L.; Yu, Y.; Kou, X.P.; Yu, L. System Identification and Experiment Evaluation of a Piezoelectric-Based Sting Damper in a Transonic Wind Tunnel. Rev. Sci. Instrum. 2019, 90, 075102. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Based on LMS Algorithm | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| R1 | 0.8822 | ||||||||
| VSNLMS algorithm, β, γ take 0.5, α take 0.1~0.9 | |||||||||
| R2 | 0.9505 | 0.9656 | 0.9718 | 0.9752 | 0.9774 | 0.9789 | 0.9801 | 0.9810 | 0.9817 |
| VSNLMS algorithm, α, γ take 0.5, β take 0.1~0.9 | |||||||||
| R3 | 0.9507 | 0.9655 | 0.9716 | 0.9750 | 0.9772 | 0.9787 | 0.9799 | 0.9808 | 0.9815 |
| VSNLMS algorithm, α, β take 0.5, γ take 0.1~0.9 | |||||||||
| R4 | 0.9779 | 0.9778 | 0.9777 | 0.9776 | 0.9775 | 0.9774 | 0.9773 | 0.9772 | 0.9771 |
| LMS Algorithm | |||||||||
|---|---|---|---|---|---|---|---|---|---|
| R1 | 0.8822 | ||||||||
| M-VSNLMS algorithm, α, β take 0.9, γ take 0.1, θ take 0.1~0.9 | |||||||||
| R5 | 0.9778 | 0.9792 | 0.9796 | 0.9811 | 0.9821 | 0.9831 | 0.9835 | NaN | NaN |
| Estimated Parameters | a1 | a2 | b2 | b1 | d1 |
|---|---|---|---|---|---|
| True value | −0.5 | −0.2 | 1.0 | 1.5 | −0.8 |
| Estimated value | −0.5158 | −0.2059 | 0.9671 | 1.4673 | 0.0044 |
| Estimation error | 0.0158 | 0.0059 | 0.0329 | 0.0327 | 0.8044 |
| Components | Brand | Function |
|---|---|---|
| Computer operating system | Windows 7 | Program running environment |
| DC stabilized power supply | DP832A | Provide stable power supply for the balance |
| Balance | ADAM-3016 | Measuring force and torque signals |
| Strain signal acquisition module | PXIe-4339 | Signal amplification and filtering |
| Filter | PFI- 28618-M102 | Low pass |
| Controller | dSPACE-Microlabox RTI1202 | A/D conversion, calculation control signal, D/A conversion |
| Power amplifier | E-481K023 | Amplify control signal |
| Mathematical Model | Mathematical Model Order | Complexity of Mathematical Models | ||
|---|---|---|---|---|
| ARMAX | 0.8787 | 0.0042 | 19 | Complex |
| N4SID | 0.8981 | 0.0021 | 11 | Complex |
| LMS | 0.9687 | 0.0011 | - | Simple |
| M-VSNLMS | 0.9898 | 0.00039 | - | Simple |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Lu, B.; Kou, X.; Shi, Y.; Yu, L.; Guo, H.; Lv, B.; Zeng, K. Research on Variable-Step-Size Adaptive Filter Algorithm with a Momentum Term. Appl. Sci. 2023, 13, 12077. https://doi.org/10.3390/app132112077
Li B, Lu B, Kou X, Shi Y, Yu L, Guo H, Lv B, Zeng K. Research on Variable-Step-Size Adaptive Filter Algorithm with a Momentum Term. Applied Sciences. 2023; 13(21):12077. https://doi.org/10.3390/app132112077
Chicago/Turabian StyleLi, Binbin, Bo Lu, Xiping Kou, Yang Shi, Li Yu, Hongtao Guo, Binbin Lv, and Kaichun Zeng. 2023. "Research on Variable-Step-Size Adaptive Filter Algorithm with a Momentum Term" Applied Sciences 13, no. 21: 12077. https://doi.org/10.3390/app132112077
APA StyleLi, B., Lu, B., Kou, X., Shi, Y., Yu, L., Guo, H., Lv, B., & Zeng, K. (2023). Research on Variable-Step-Size Adaptive Filter Algorithm with a Momentum Term. Applied Sciences, 13(21), 12077. https://doi.org/10.3390/app132112077