

Sliding Mode Controller for Autonomous Tractor-Trailer Vehicle Reverse Path Tracking


Abstract
:1. Introduction
1.1. Motivation
1.2. Related Works

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| References | Methods | Remarks |
|---|---|---|
| [1,3,4] | Path following for forward motion | The problem of stability in forward motion arises at high speed. |
| [9,10,11,12] | Neural network techniques | For reverse (backward) motion. |
| [16,17,18] | Fuzzy Control and Systems | It does not depend on precise mathematical models |
| [19,20] | Model Predictive Control | Compensates for the uncertainty of the system |
| [25,26,27,28,29,30,33,34] | Sliding Mode Control | Robust Control for systems subject to uncertainties and disturbance. |
1.3. Contributions
1.4. Organization
2. System Model
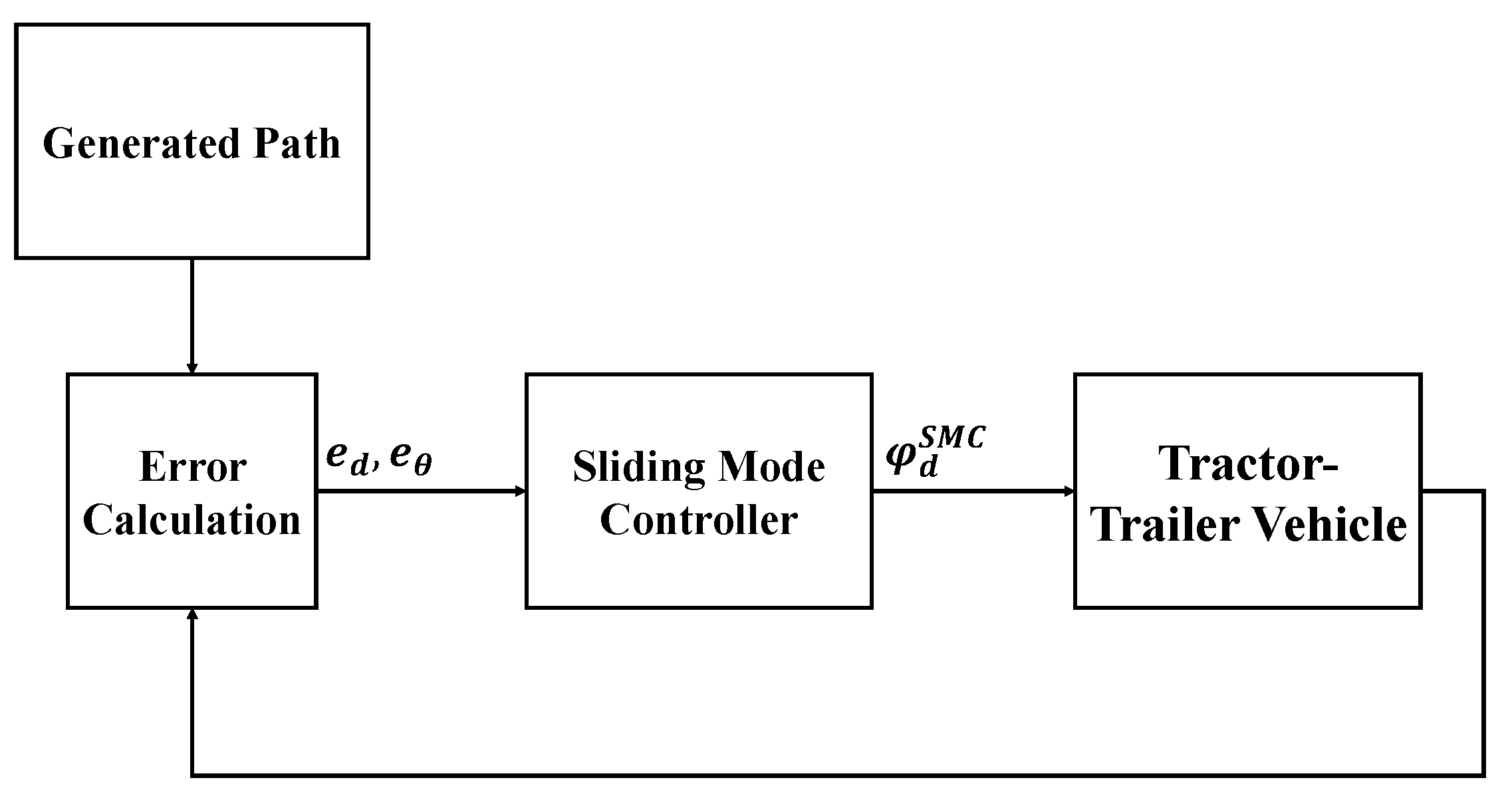
3. Sliding Mode Controller
3.1. Controller Design
3.2. Stability Analysis
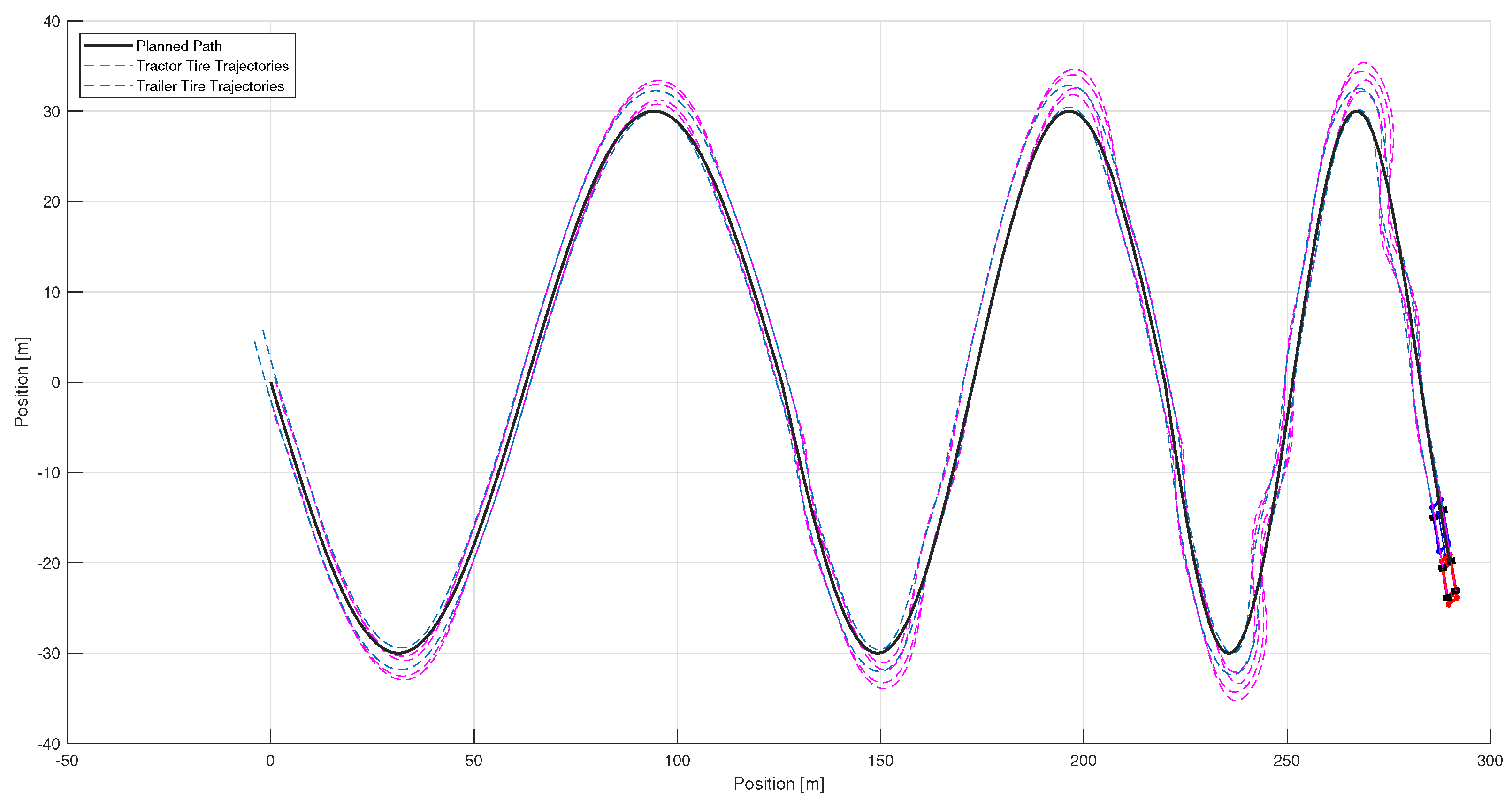
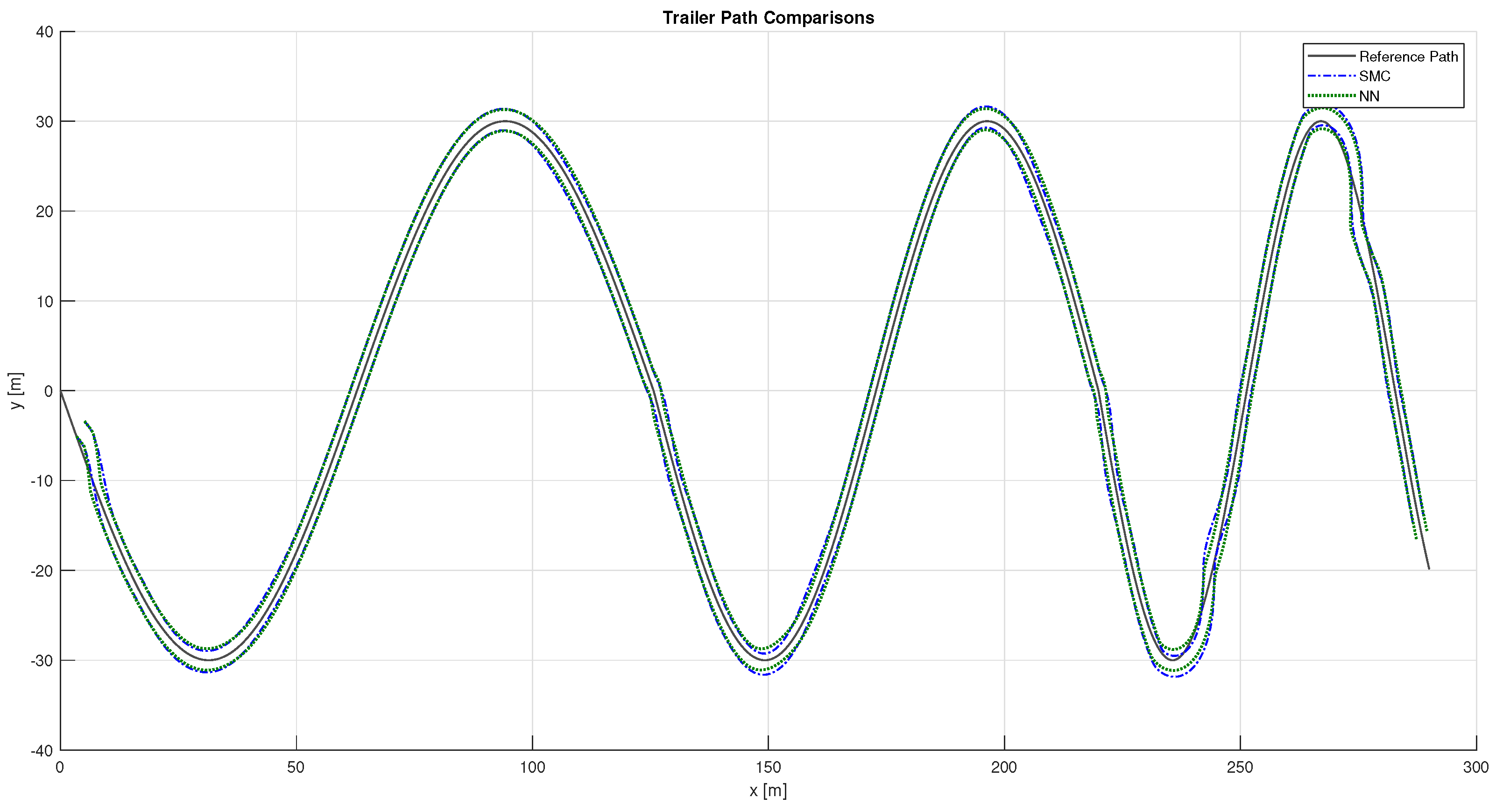
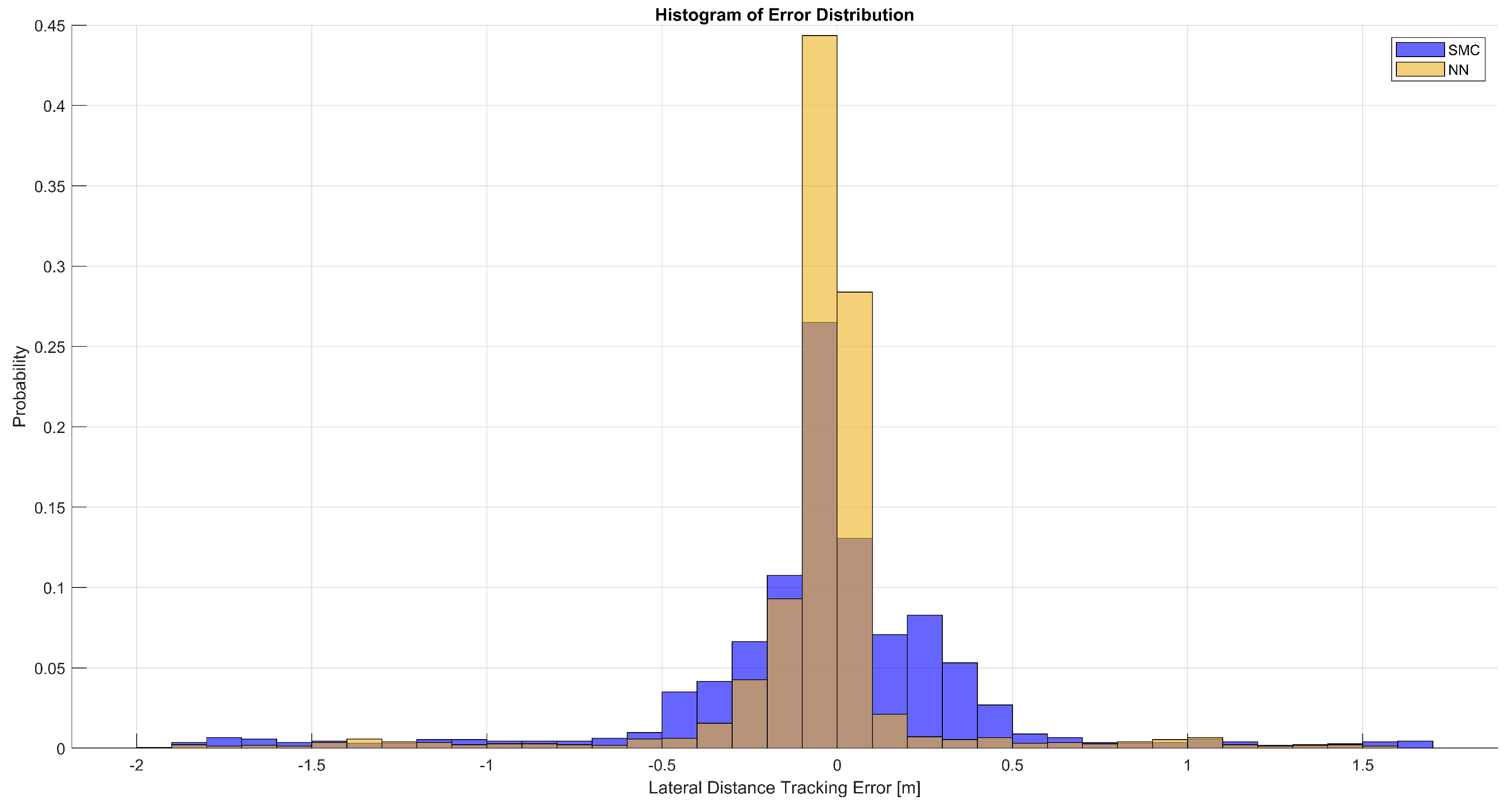
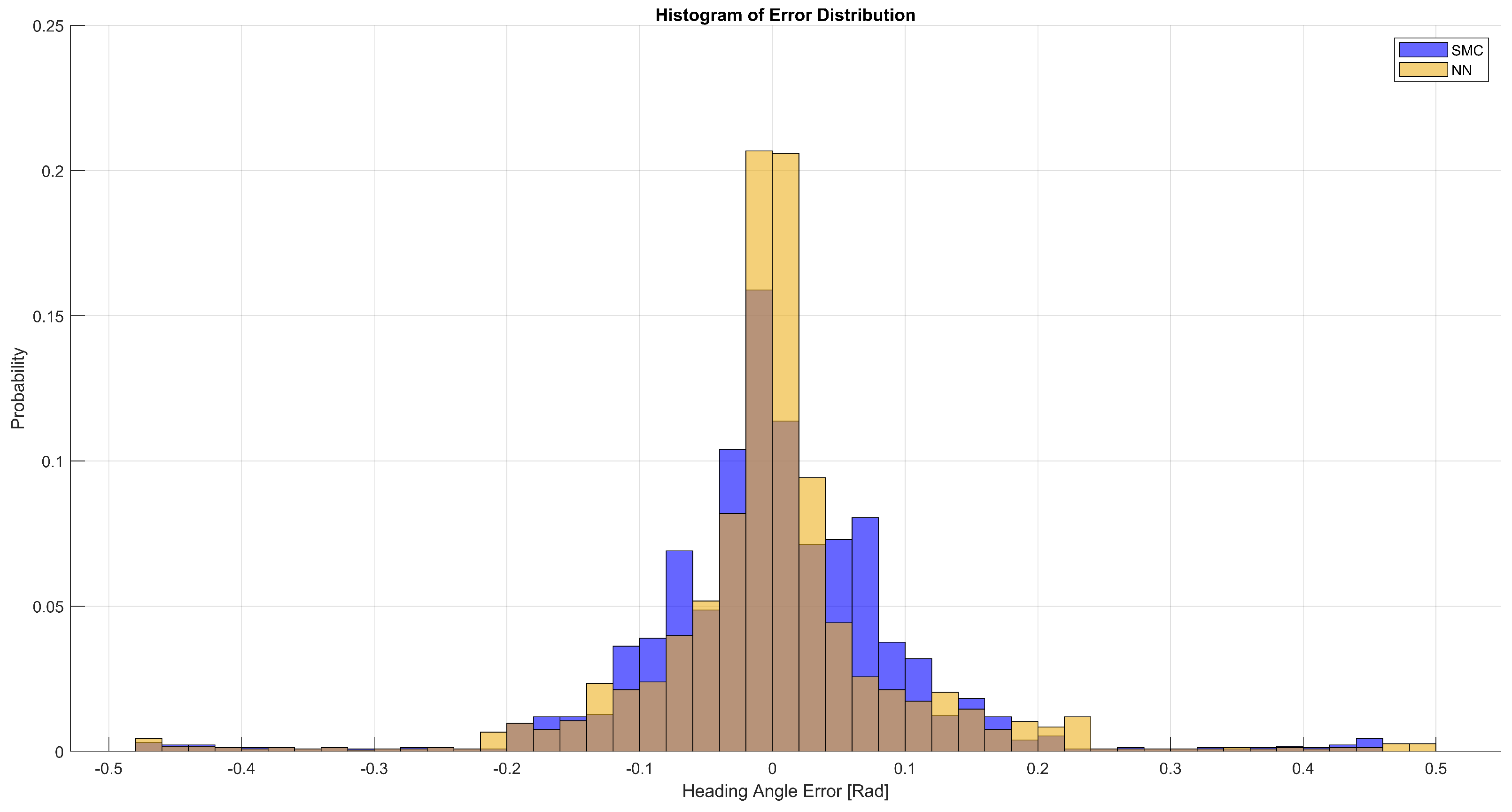
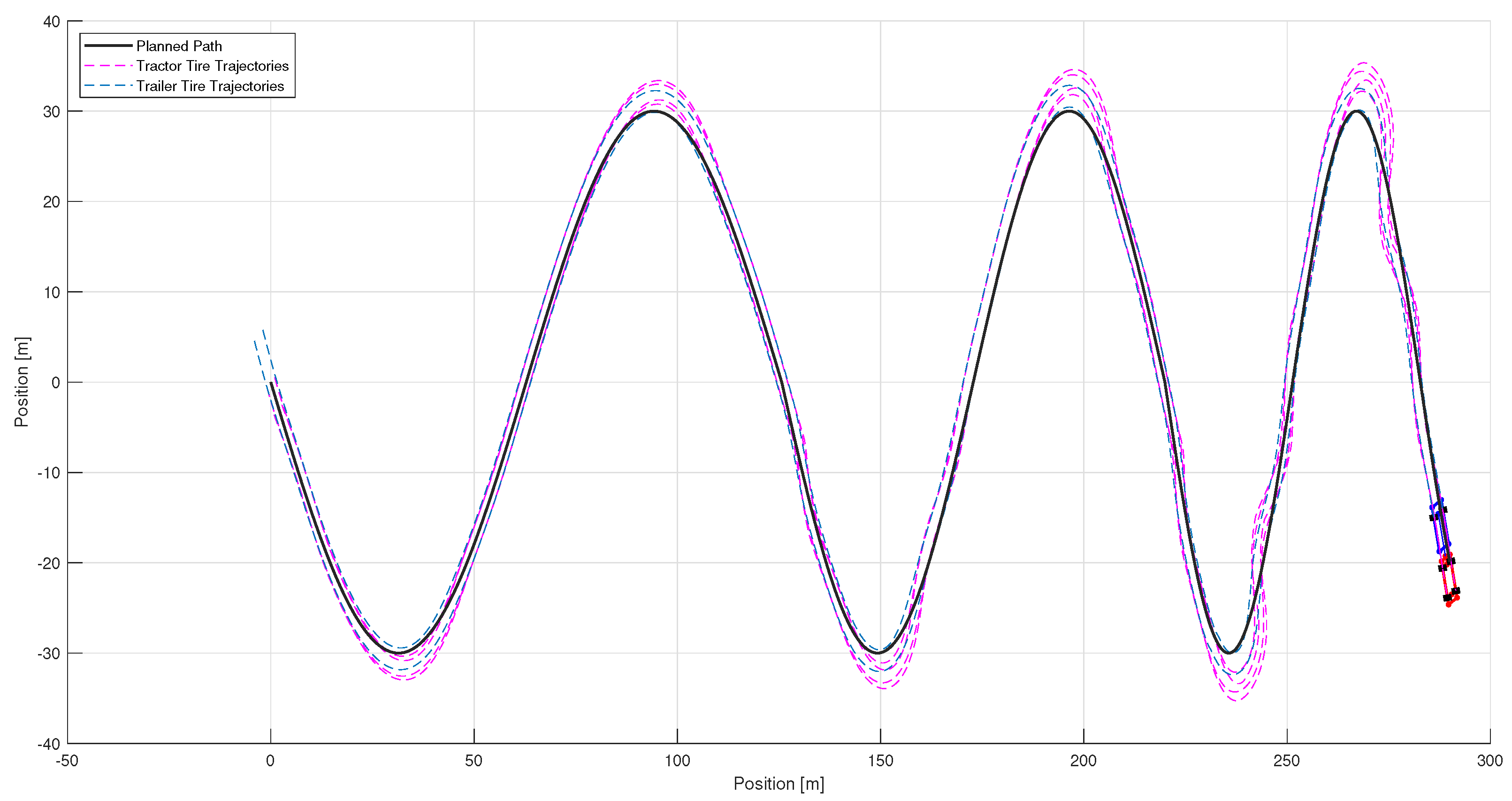
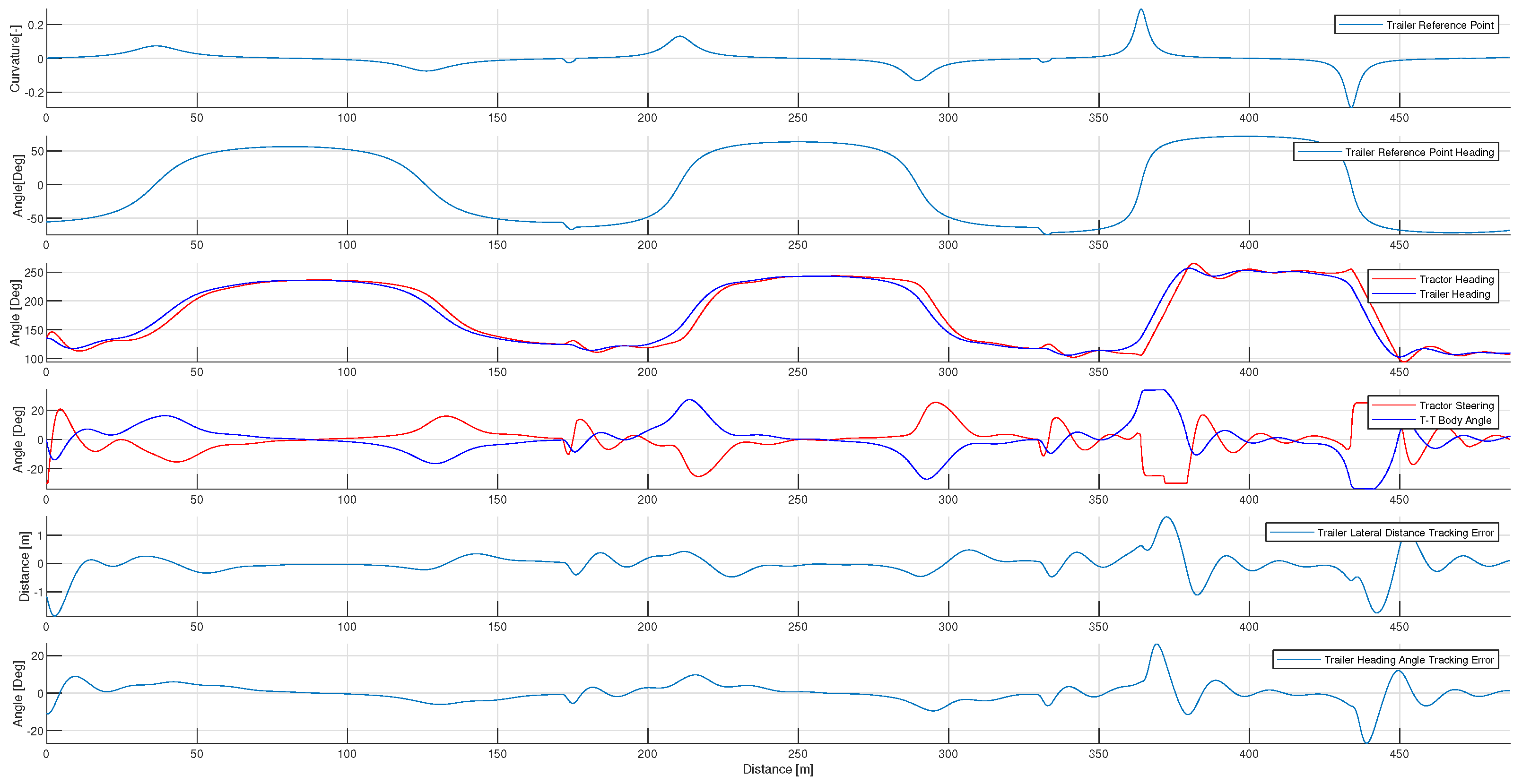
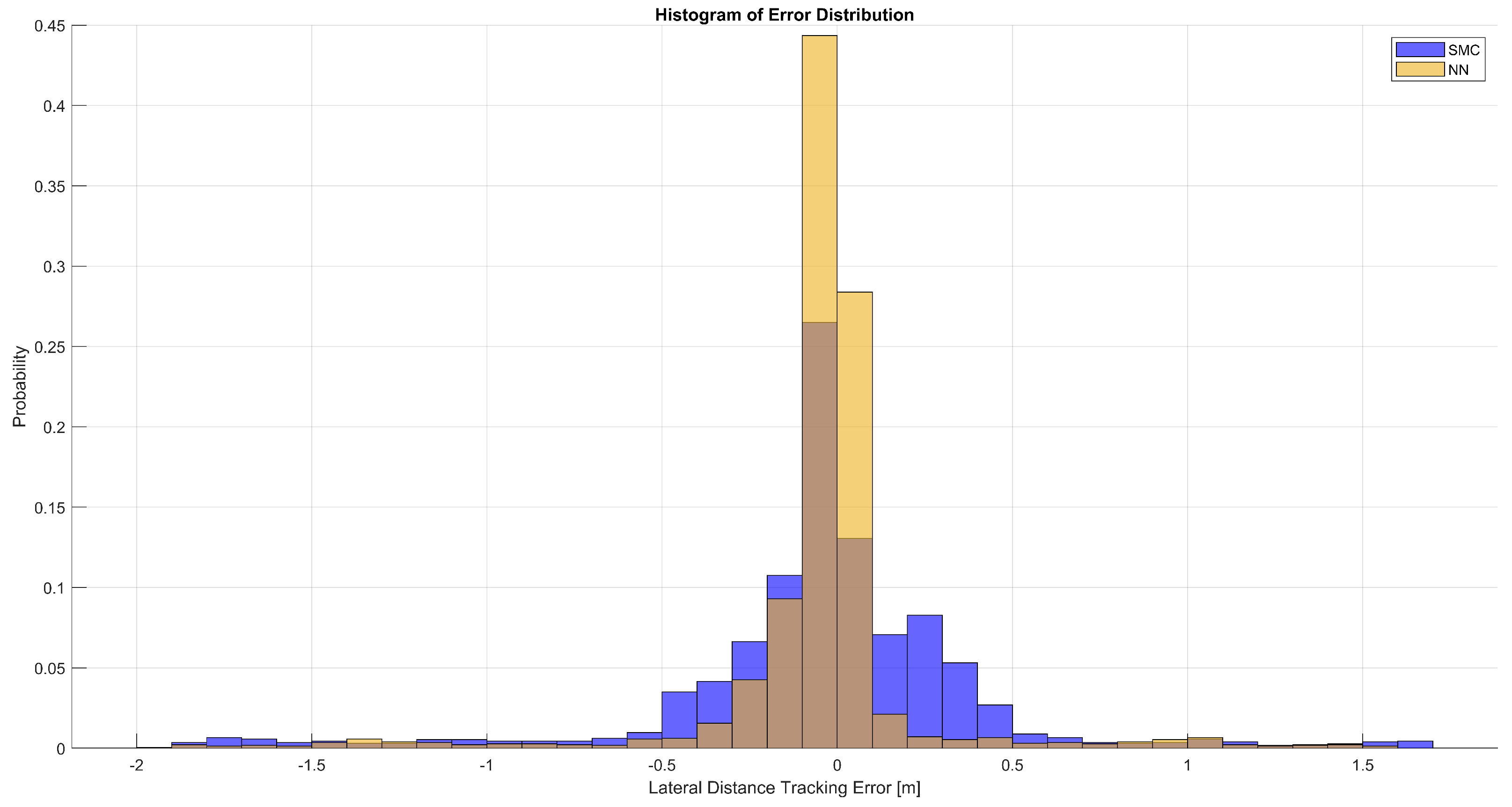
4. Simulation Results
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yue, M.; Hou, X.; Yang, L. An efficient trajectory tracking control for tractor-trailer vehicle system. In Proceedings of the 36th Chinese Control Conference (CCC), Dalian, China, 26–28 July 2017; pp. 546–551. [Google Scholar]
- Hejase, M.; Jing, J.; Maroli, J.M.; Bin Salamah, Y.; Fiorentini, L.; Özgüner, Ü. Constrained backward path tracking control using a plug-in jackknife prevention system for autonomous tractor-trailers. In Proceedings of the 21st International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 4–7 November 2018; pp. 2012–2017. [Google Scholar]
- Khalaji, A.K.; Moosavian, S.A.A. Robust adaptive controller for a tractor—Trailer mobile robot. IEEE/ASME Trans. Mechatron. 2014, 19, 943–953. [Google Scholar] [CrossRef]
- Yuan, J.; Sun, F.; Huang, Y. Trajectory generation and tracking control for double-steering tractor–trailer mobile robots with on-axle hitching. IEEE Trans. Ind. Electron. 2015, 62, 7665–7677. [Google Scholar] [CrossRef]
- Bai, G.; Meng, Y.; Liu, L.; Luo, W.; Gu, Q.; Li, K. A new path tracking method based on multilayer model predictive control. Appl. Sci. 2019, 9, 2649. [Google Scholar] [CrossRef]
- Morbidi, F.; Prattichizzo, D. Sliding mode formation tracking control of a tractor and trailer-car system. In Proceedings of the Robotics: Science and Systems, Atlanta, GA, USA, 27–30 June 2007; Volume 3, pp. 126–133. [Google Scholar]
- Pradalier, C.; Usher, K. Robust trajectory tracking for a reversing tractor trailer. J. Field Robot. 2008, 25, 378–399. [Google Scholar] [CrossRef]
- Leng, Z.; Minor, M. A simple tractor-trailer backing control law for path following. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 5538–5542. [Google Scholar]
- Nguyen, D.; Widrow, B. The truck backer-upper: An example of self-learning in neural networks. In Proceedings of the International Joint Conference on Neural Networks, Washington, DC, USA, 18–22 June 1989; Volume 2, pp. 357–363. [Google Scholar] [CrossRef]
- Koza, J.R. A genetic approach to the truck backer upper problem and the inter-twined spiral problem. In Proceedings of the IJCNN International Joint Conference on Neural Networks, Baltimore, MD, USA, 7–11 June 1992; Volume 4, pp. 310–318. [Google Scholar]
- Schoenauer, M.; Ronald, E. Neuro-genetic truck backer-upper controller. In Proceedings of the 1st IEEE Conference on Evolutionary Computation: IEEE World Congress on Computational Intelligence, Orlando, FL, USA, 27–29 June 1994; Volume 2, pp. 720–723. [Google Scholar] [CrossRef]
- Maroli, J.M.; Özgüner, Ü. 9 Evolving Neural Network Controllers for Tractor-Trailer Vehicle Backward Path Tracking. Veh. Drivers Saf. 2020, 2, 135. [Google Scholar]
- Astolfi, A.; Bolzern, P.; Locatelli, A. Path-tracking of a tractor-trailer vehicle along rectilinear and circular paths: A Lyapunov-based approach. IEEE Trans. Robot. Autom. 2004, 20, 154–160. [Google Scholar] [CrossRef]
- González-Cantos, A.; Ollero, A. Backing-up maneuvers of autonomous tractor-trailer vehicles using the qualitative theory of nonlinear dynamical systems. Int. J. Robot. Res. 2009, 28, 49–65. [Google Scholar] [CrossRef]
- Petrov, P. Nonlinear backward tracking control of an articulated mobile robot with off-axle hitching. In Proceedings of the WSEAS International Conference ISPRA, Cambridge, UK, 20–22 February 2010; pp. 269–273. [Google Scholar]
- Kong, S.G.; Kosko, B. Adaptive fuzzy systems for backing up a truck-and-trailer. IEEE Trans. Neural Netw. 1992, 3, 211–223. [Google Scholar] [CrossRef]
- Tanaka, K.; Kosaki, T. Design of a stable fuzzy controller for an articulated vehicle. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 1997, 27, 552–558. [Google Scholar] [CrossRef]
- Cheng, J.; Wang, B.; Xu, Y. Backward Path Tracking Control for Mobile Robot with Three Trailers. In Proceedings of the International Conference on Neural Information Processing, Guangzhou, China, 14–18 November 2017; pp. 32–41. [Google Scholar]
- Yang, B.; Taehyun, S.; Nenglian, F. Look-ahead path information based receding horizon control for backing-up tractor-trailer systems. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; pp. 4201–4206. [Google Scholar]
- Bin, Y.; Shim, T. Constrained model predictive control for backing-up tractor-trailer system. In Proceedings of the 10th World Congress on Intelligent Control and Automation (WCICA), Beijing, China, 6–8 July 2012; pp. 2165–2170. [Google Scholar]
- Michałek, M.; Kiełczewski, M. Cascaded VFO set-point control for N-trailers with on-axle hitching. IEEE Trans. Control Syst. Technol. 2014, 22, 1597–1606. [Google Scholar] [CrossRef]
- Michałek, M.M. Modular tracking controller for N-trailers with non-zero hitching offsets. In Proceedings of the American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 5371–5376. [Google Scholar]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: Berlin/Heidelberg, Germany, 2014; Volume 10. [Google Scholar]
- Fortuna, L.; Frasca, M.; Buscarino, A. Optimal and Robust Control: Advanced Topics with MATLAB®; CRC Press: Boca Raton, FL, USA, 2021. [Google Scholar]
- Shahmirzadi, D.; Langari, R.; Ricalde, L.; Sanchez, E. Intelligent vs. sliding mode control in rollover prevention of tractor-semitrailers. Int. J. Veh. Auton. Syst. 2006, 4, 68–87. [Google Scholar] [CrossRef]
- Matveev, A.S.; Hoy, M.; Katupitiya, J.; Savkin, A.V. Nonlinear sliding mode control of an unmanned agricultural tractor in the presence of sliding and control saturation. Robot. Auton. Syst. 2013, 61, 973–987. [Google Scholar] [CrossRef]
- Saeedi, M.A.; Kazemi, R.; Azadi, S. Improvement in the rollover stability of a liquid-carrying articulated vehicle via a new robust controller. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2017, 231, 322–346. [Google Scholar] [CrossRef]
- Esmaeili, N.; Kazemi, R.; Tabatabaei Oreh, S.H. An adaptive sliding mode controller for the lateral control of articulated long vehicles. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019, 233, 487–515. [Google Scholar] [CrossRef]
- Esmaeili, N.; Kazemi, R. Development of the active disturbance rejection control method for increasing the stability of the long articulated vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2019, 233, 3554–3576. [Google Scholar] [CrossRef]
- Jin, Z.; Liang, Z.; Wang, X.; Zheng, M. Adaptive backstepping sliding mode control of tractor-trailer system with input delay based on RBF neural network. Int. J. Control Autom. Syst. 2021, 19, 76–87. [Google Scholar] [CrossRef]
- Sun, X.; Yuan, H. Robust control of farm tractors on variable sloped terrains based on sliding-mode observers. In Proceedings of the 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; pp. 5479–5484. [Google Scholar]
- Yin, C.; Wang, S.; Gao, J.; Li, X. Trajectory tracking for agricultural tractor based on improved fuzzy sliding mode control. PLoS ONE 2023, 18, e0283961. [Google Scholar] [CrossRef]
- Yin, C.; Wang, S.; Li, X.; Yuan, G.; Jiang, C. Trajectory tracking based on adaptive sliding mode control for agricultural tractor. IEEE Access 2020, 8, 113021–113029. [Google Scholar] [CrossRef]
- Jiang, C.; Yin, C.; Gao, J.; Yuan, G. Position control of gear shift based on sliding mode active disturbance rejection control for small-sized tractors. Sci. Prog. 2022, 105, 00368504221081966. [Google Scholar] [CrossRef]
- Jing, J.; Maroli, J.M.; Bin Salamah, Y.; Hejase, M.; Fiorentini, L.; Özgüner, Ü. Control Method Designs and Comparisons for Tractor-Trailer Vehicle Backward Path Tracking. In Proceedings of the 57th IEEE Conference on Decision and Control, Miami Beach, FL, USA, 17–19 December 2018. [Google Scholar]
- Aldughaiyem, A.; Bin Salamah, Y.; Ahmad, I. Control design and assessment for a reversing tractor—Trailer system using a cascade controller. Appl. Sci. 2021, 11, 10634. [Google Scholar] [CrossRef]
- Özgüner, Ü.; Acarman, T.; Redmill, K.A. Autonomous Ground Vehicles; Artech House: Norwood, MA, USA, 2011. [Google Scholar]
- Gao, W.; Hung, J.C. Variable structure control of nonlinear systems: A new approach. IEEE Trans. Ind. Electron. 1993, 40, 45–55. [Google Scholar]



| Parameter | Description | Unit |
|---|---|---|
| Tractor’s heading angle | rad | |
| Tractor’s velocity in the x-axis | m/s | |
| Tractor’s velocity in the y-axis | m/s | |
| Tractor’s heading angular rate | rad/s | |
| Tractor’s steering angle | rad | |
| v | Speed of the tractor system | m/s |
| Tractor’s wheelbase length | m | |
| Length between the tractor’s hitch and the trailer’s rear axle | m | |
| l | Length between the tractor’s hitch and the tractor’s rear axle | m |
| Articulated angle rate | rad/s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bin Salamah, Y. Sliding Mode Controller for Autonomous Tractor-Trailer Vehicle Reverse Path Tracking. Appl. Sci. 2023, 13, 11998. https://doi.org/10.3390/app132111998
Bin Salamah Y. Sliding Mode Controller for Autonomous Tractor-Trailer Vehicle Reverse Path Tracking. Applied Sciences. 2023; 13(21):11998. https://doi.org/10.3390/app132111998
Chicago/Turabian StyleBin Salamah, Yasser. 2023. "Sliding Mode Controller for Autonomous Tractor-Trailer Vehicle Reverse Path Tracking" Applied Sciences 13, no. 21: 11998. https://doi.org/10.3390/app132111998
APA StyleBin Salamah, Y. (2023). Sliding Mode Controller for Autonomous Tractor-Trailer Vehicle Reverse Path Tracking. Applied Sciences, 13(21), 11998. https://doi.org/10.3390/app132111998