
Application of Physics-Informed Neural Networks to River Silting Simulation



Abstract
1. Introduction
2. Materials and Methods
2.1. Neural Networks Based on Physics
- Definition of the physical problem: Begin by clearly defining the physical problem you want to solve. In your case, it involves the Euler equations describing gas dynamics and shock wave evolution.
- Formulation of the mathematical model: Translate the physical problem into a mathematical model. The Euler equations for gas dynamics constitute a system of hyperbolic equations. Solving this system of equations is essential for modeling shock wave evolution.
- Preparation of training data: Collect the data to be used for network training. This may include both simulated data and experimental data, if available.
- Definition of PINN: Create a neural network that will be trained to solve the Euler equations. This network will be “physically informed” (PINN), meaning it integrates the physical equations into the training process.
- Definition of the loss function: Specify the loss function to be minimized during PINN training. The loss function should encompass both the Euler equations’ conditions and the training data. This ensures that the network provides physically accurate solutions.
- Network training: Utilize the training data and loss function to train the network. The training process should be capable of capturing the shock wave evolution and solving the Euler equations.
- Results validation: After training, verify the network’s results with test data or real experiments. Ensure that the solutions align with physical reality and shock wave evolution.
- Refinement and optimization: If the results do not meet your requirements, make adjustments to the model, loss function, and training data, then repeat the process.
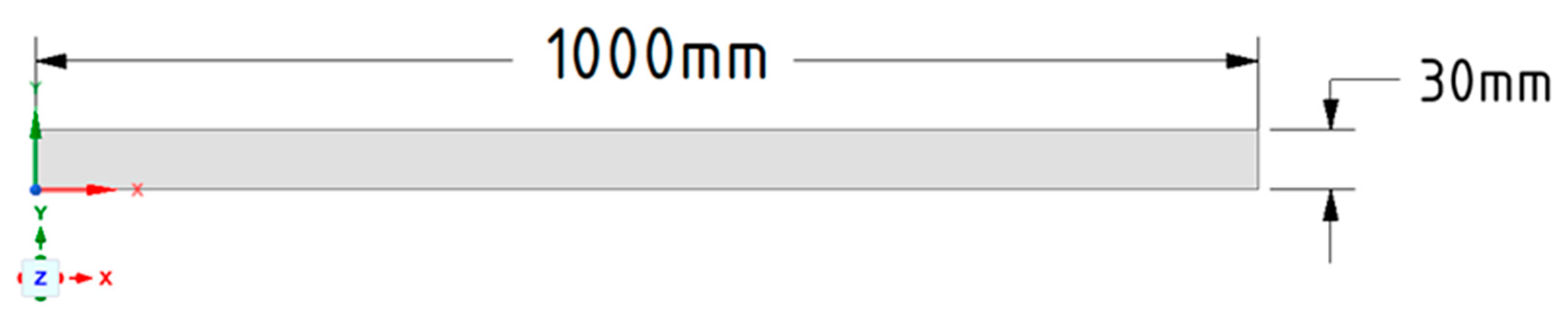
2.2. Mathematical Model in Ansys
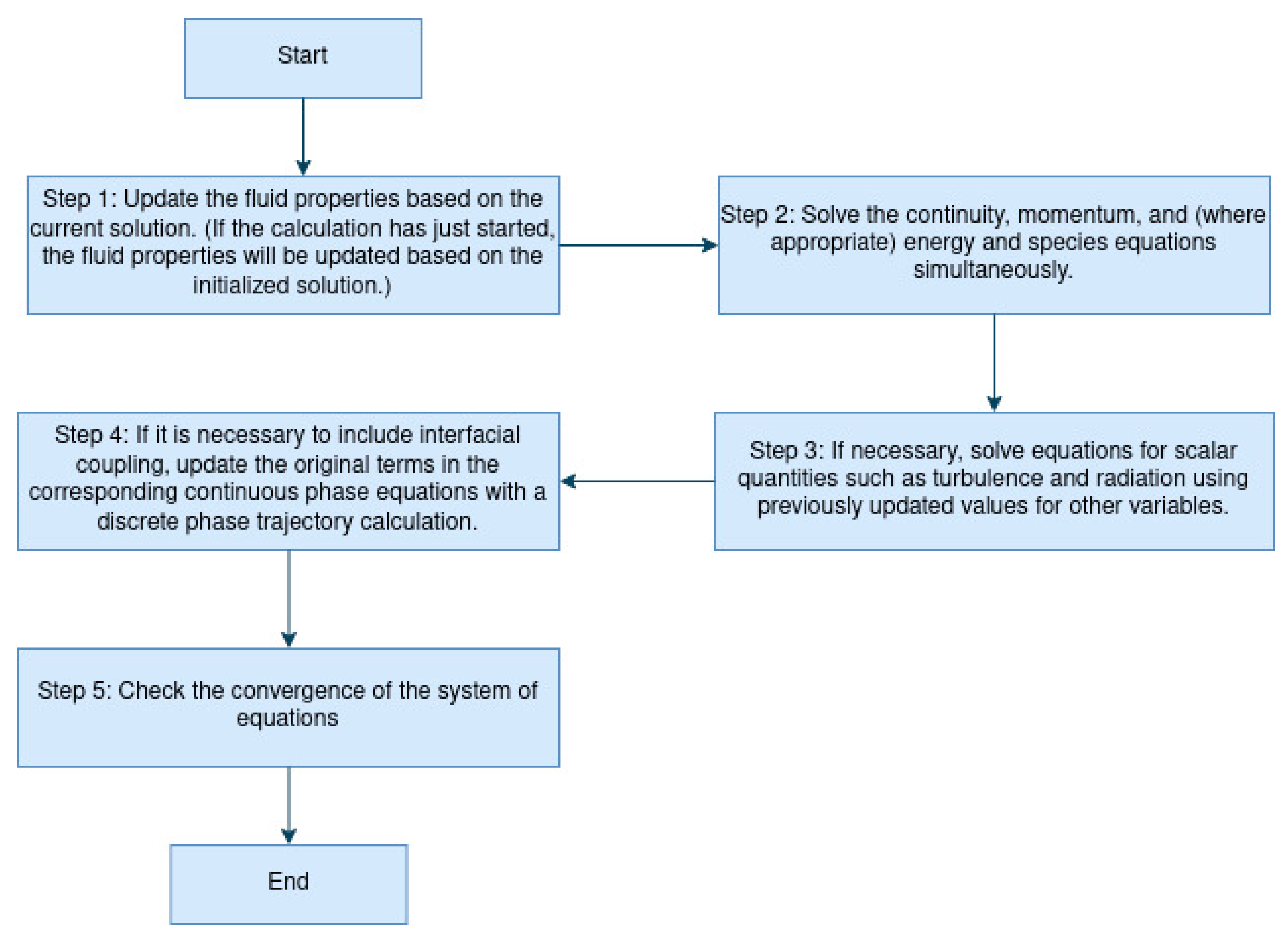
2.3. Numerical Simulation Algorithm in Ansys
- -
- Implicit: For a given variable, the unknown value in each cell is calculated using a ratio that includes both existing and unknown values from adjacent cells. Therefore, each unknown will appear in more than one equation of the system, and these equations must be solved simultaneously in order to obtain unknown quantities.
- -
- Explicit: For a given variable, the unknown value in each cell is calculated using a relation that includes only existing values. Therefore, each unknown will only appear in one equation in the system, and the equations for the unknown value in each cell can be solved one at a time to get the unknowns.
3. Results
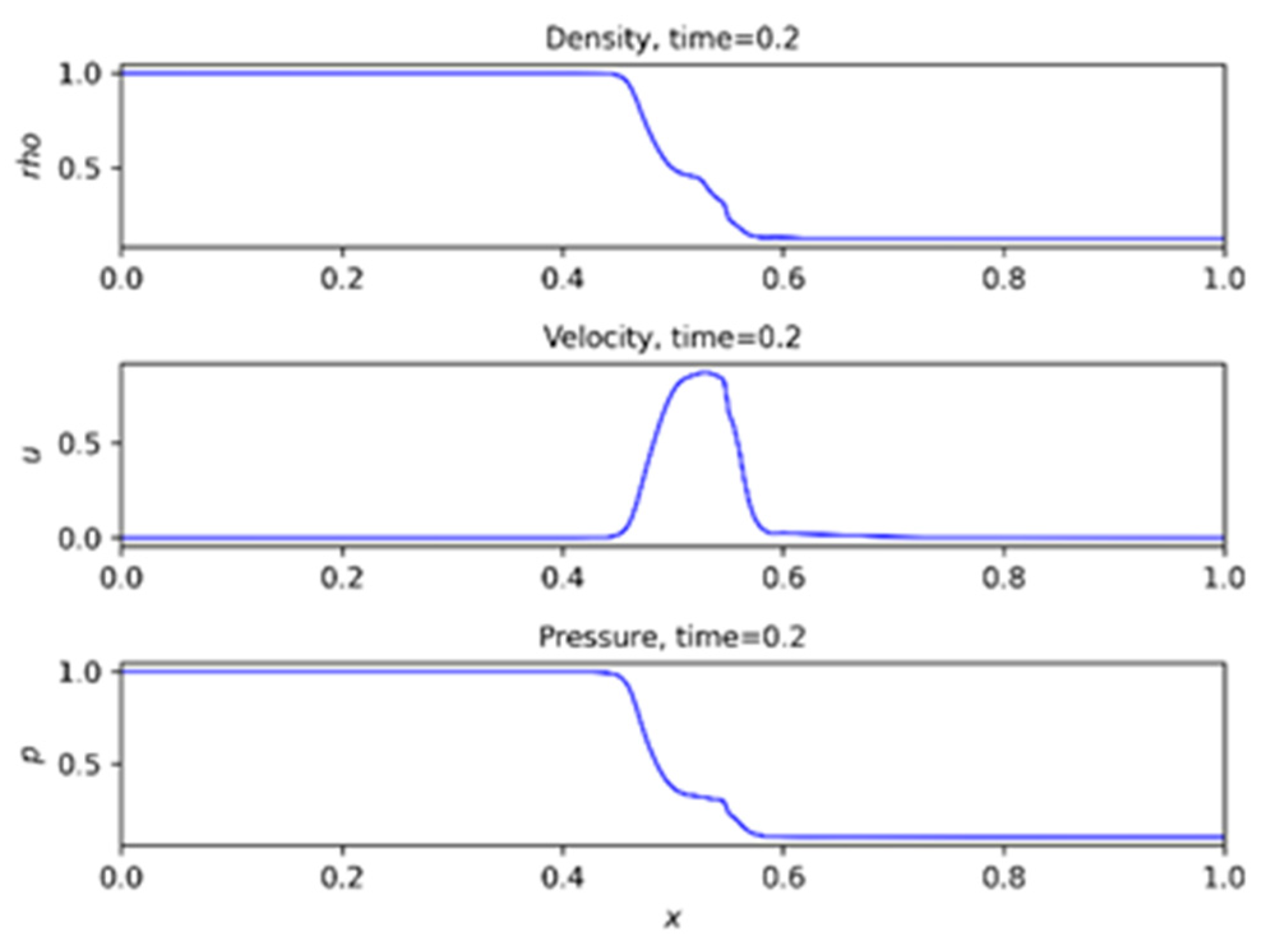
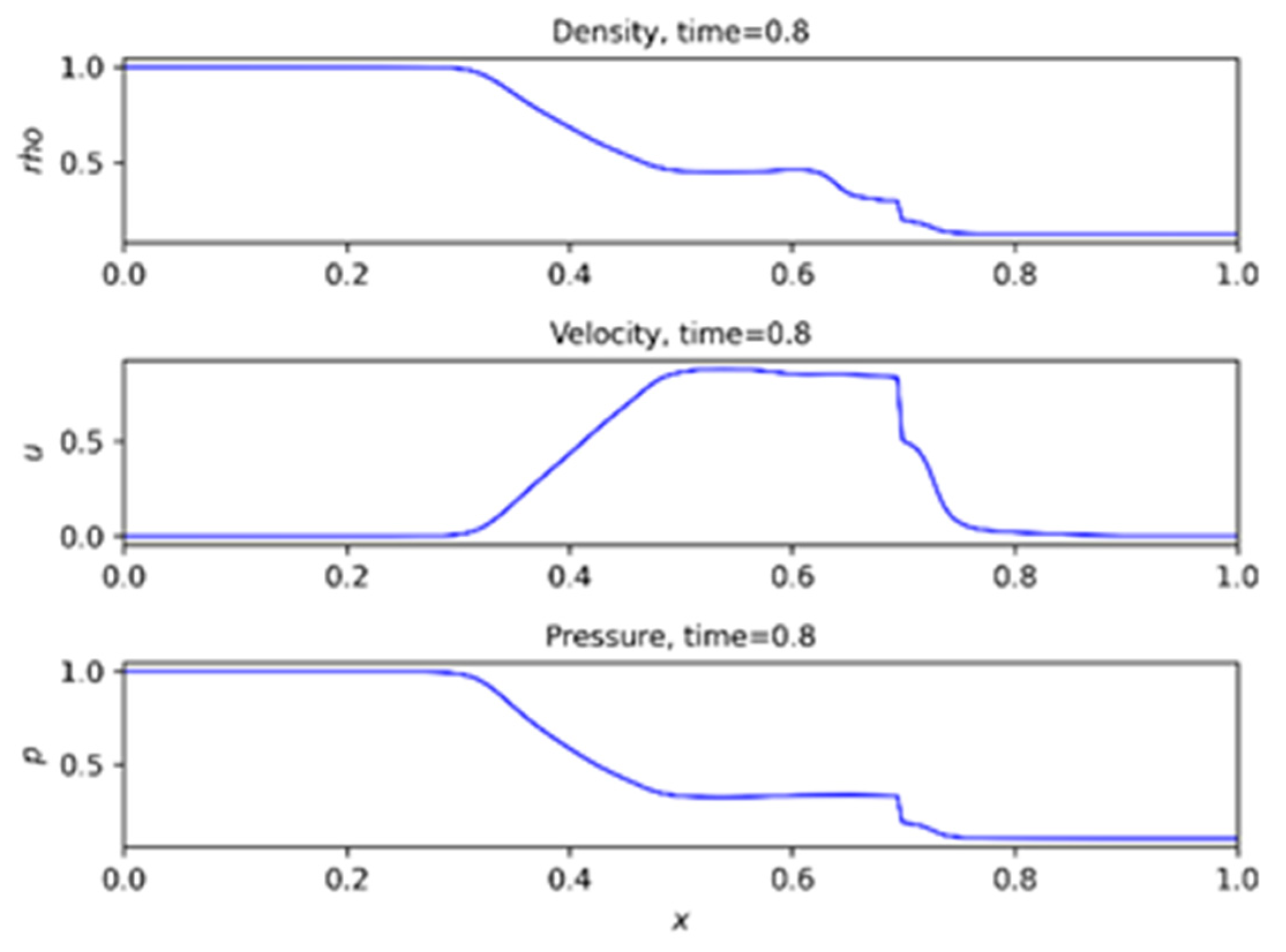
3.1. Numerical Result from PINN
3.2. Numerical Result from ANSYS
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Z.; Lu, M.; Ji, S.; Yu, H.; Nie, C. Rich CNN Features for Water-Body Segmentation from Very High Resolution Aerial and Satellite Imagery. Remote Sens. 2021, 13, 1912. [Google Scholar] [CrossRef]
- Hasan, O.; Smrkulj, N.; Miko, S.; Brunović, D.; Ilijanić, N.; Šparica Miko, M. Integrated Reconstruction of Late Quaternary Geomorphology and Sediment Dynamics of Prokljan Lake and Krka River Estuary, Croatia. Remote Sens. 2023, 15, 2588. [Google Scholar] [CrossRef]
- Wu, X.; Feng, X.; Fu, B.; Yin, S.; He, C. Managing erosion and deposition to stabilize a silt-laden river. Sci. Total Environ. 2023, 881, 163444. [Google Scholar] [CrossRef]
- Sun, L.; Guo, H.; Wang, H.; Zhang, B.; Feng, H.; Wu, S.; Siddique, K.H.M. Deep learning for check dam area extraction with optical images and digital elevation model: A case study in the hilly and gully regions of the Loess Plateau, China. Earth Surf. Process. Landf. 2023. [Google Scholar] [CrossRef]
- Best, J.; Darby, S.E. The Pace of Human-Induced Change in Large Rivers: Stresses, Resilience, and Vulnerability to Extreme Events. One Earth 2020, 2, 510–514. [Google Scholar] [CrossRef] [PubMed]
- Marren, P.M.; Grove, J.R.; Webb, J.A.; Stewardson, M.J. The Potential for Dams to Impact Lowland Meandering River Floodplain Geomorphology. Sci. World J. 2014, 2014, 1–24. [Google Scholar] [CrossRef] [PubMed]
- Hawley, R.J. Making Stream Restoration More Sustainable: A Geomorphically, Ecologically, and Socioeconomically Principled Approach to Bridge the Practice with the Science. BioScience 2018, 68, 517–528. [Google Scholar] [CrossRef] [PubMed]
- Merembayev, T.; Mukhamediev, R.; Amirgaliyev, Y.; Malakhov, D.; Terekhov, A.; Kuchin, Y.; Yakunin, K.; Symagulov, A. The Application of Machine Learning Technique to Soil Salinity Mapping in South of Kazakhstan. In Proceedings of the 15th Asian Conference on Intelligent Information and Database Systems, Phuket, Thailand, 24–26 July 2023; pp. 244–253. [Google Scholar]
- Constantine, J.A.; Dunne, T.; Ahmed, J.; Legleiter, C.; Lazarus, E.D. Sediment supply as a driver of river meandering and floodplain evolution in the Amazon Basin. Nat. Geosci. 2014, 7, 899–903. [Google Scholar] [CrossRef]
- Dottori, F.; Szewczyk, W.; Ciscar, J.-C.; Zhao, F.; Alfieri, L.; Hirabayashi, Y.; Feyen, L. Increased human and economic losses from river flooding with anthropogenic warming. Nat. Clim. Change 2018, 8, 781–786. [Google Scholar] [CrossRef]
- Sinha, R.; Gupta, A.; Mishra, K.; Tripathi, S.; Nepal, S.; Wahid, S.M.; Swarnkar, S. Basin-scale hydrology and sediment dynamics of the Kosi River in the Himalayan foreland. J. Hydrol. 2019, 570, 156–166. [Google Scholar] [CrossRef]
- Phillips, C.B.; Masteller, C.C.; Slater, L.J.; Dunne, K.B.J.; Francalanci, S.; Lanzoni, S.; Merritts, D.J.; Lajeunesse, E.; Jerolmack, D.J. Threshold constraints on the size, shape and stability of alluvial rivers. Nat. Rev. Earth Environ. 2022, 3, 406–419. [Google Scholar] [CrossRef]
- Powledge, G.R.; Ralston, D.C.; Miller, P.; Chen, Y.H.; Clopper, P.E.; Temple, D.M. Mechanics of overflow erosion on embankments. I: Research activities; II/hydraulic and design considerations. J. Hydraul. Eng. 1989, 115, 1040–1075. [Google Scholar] [CrossRef]
- Schmocker, L.; Hager, W.H. Modelling dike breaching due to overtopping. J. Hydraul. Res. 2009, 47, 585–597. [Google Scholar] [CrossRef]
- Froehlich, D.C. Embankment dam breach parameters and their uncertainties. J. Hydraul. Eng. 2008, 134, 1708–1721. [Google Scholar] [CrossRef]
- Fetzer, J.; Holzner, M.; Plötze, M.; Furrer, G. Clogging of an Alpine streambed by silt-sized particles—Insights from laboratory and field experiments. Water Res. 2017, 126, 60–69. [Google Scholar] [CrossRef]
- Yao, P.; Su, M.; Wang, Z.; van Rijn, L.C.; Zhang, C.; Chen, Y.; Stive, M.J.F. Experiment inspired numerical modeling of sediment concentration over sand–silt mixtures. Coast. Eng. 2015, 105, 75–89. [Google Scholar] [CrossRef]
- Kazidenov, D.; Khamitov, F.; Amanbek, Y. Coarse-graining of CFD-DEM for simulation of sand production in the modified cohesive contact model. Gas Sci. Eng. 2023, 113, 204976. [Google Scholar] [CrossRef]
- Merembayev, T.; Amanbek, Y. Natural Fracture Network Model Using Machine Learning Approach. In Proceedings of the 24th International Conference on Computational Science and Its Applications, Athens, Greece, 3–6 July 2023; pp. 384–397. [Google Scholar]
- Ecemis, N. Experimental and numerical modeling on the liquefaction potential and ground settlement of silt-interlayered stratified sands. Soil Dyn. Earthq. Eng. 2021, 144, 106691. [Google Scholar] [CrossRef]
- Narbayev, B.; Amanbek, Y. Finite Element Model for Wind Comfort Around a Tall Building: A Case Study of Tower of Qazaqstan. In Proceedings of the Computational Science and Its Applications—ICCSA 2022 Workshops, Malaga, Spain, 4–7 July 2022; pp. 540–553. [Google Scholar]
- Omarova, P.; Merembayev, T.; Amirgaliyev, Y. Mathematical modeling of water movement during a dam break using the vof method. Sci. J. Astana IT Univ. 2023, 14, 104–115. [Google Scholar] [CrossRef]
- Soares-Frazão, S.; Le Grelle, N.; Spinewine, B.; Zech, Y. Dam-break induced morphological changes in a channel with uniform sediments: Measurements by a laser-sheet imaging technique. J. Hydraul. Res. 2007, 45 (Suppl. S1), 87–95. [Google Scholar] [CrossRef]
- Goutiere, L.; Soares-Frazão, S.; Zech, Y. Dam-break flow on mobile bed in abruptly widening channel: Experimental data. J. Hydraul. Res. 2011, 49, 367–371. [Google Scholar] [CrossRef]
- Buribayev, Z.; Merembayev, T.; Amirgaliyev, Y.; Miyachi, T. The Optimized Distance Calculation Method with Stereo Camera for an Autonomous Tomato Harvesting. In Proceedings of the 2021 IEEE International Conference on Smart Information Systems and Technologies (SIST), Nur-Sultan, Kazakhstan, 28–30 April 2021; pp. 1–5. [Google Scholar]
- Kenshimov, C.; Mukhanov, S.; Merembayev, T.; Yedilkhan, D. A Comparison of Convolutional Neural Networks for Kazakh Sign Language Recognition. East. Eur. J. Enterp. Technol. 2021, 113, 44–54. [Google Scholar] [CrossRef]
- Yeleussinov, A.; Amirgaliyev, Y.; Cherikbayeva, L. Improving OCR Accuracy for Kazakh Handwriting Recognition Using GAN Models. Appl. Sci. 2023, 13, 5677. [Google Scholar] [CrossRef]
- Sukumar, N.; Srivastava, A. Exact imposition of boundary conditions with distance functions in physics-informed deep neural networks. Comput. Methods Appl. Mech. Eng. 2022, 389, 114333. [Google Scholar] [CrossRef]
- ANSYS-FLUENT, version 12.0; Theory Guide; Ansys: Canonsburg, PA, USA, April 2009.
- Meng, X.; Li, Z.; Zhang, D.; Karniadakis, G.E. PPINN: Parareal physics-informed neural network for time-dependent PDEs. Comput. Methods Appl. Mech. Eng. 2020, 370, 113250. [Google Scholar] [CrossRef]
- Cheng, C.; Meng, H.; Li, Y.-Z.; Zhang, G.-T. Deep learning based on PINN for solving 2 DOF vortex induced vibration of cylinder. Ocean. Eng. 2021, 240, 109932. [Google Scholar] [CrossRef]
- Huang, Y.H.; Xu, Z.; Qian, C.; Liu, L. Solving free-surface problems for non-shallow water using boundary and initial conditions-free physics-informed neural network (bif-PINN). J. Comput. Phys. 2023, 479, 112003. [Google Scholar] [CrossRef]
- Holland, P. Hydrodynamics, Particle Relabelling and Relativity. Int. J. Theor. Phys. 2011, 51, 667–683. [Google Scholar] [CrossRef][Green Version]
- Alemi Ardakani, H.; Bridges, T.J. Dynamic coupling between shallow-water sloshing and horizontal vehicle motion. Eur. J. Appl. Math. 2010, 21, 479–517. [Google Scholar] [CrossRef]
- Anderson, J.D., Jr. Modern Compressible Flow with Historical Perspective, 2nd ed.; McGraw Hill Professional Publishing: New York, NY, USA, 1989. [Google Scholar]
- Anderson, J.D., Jr. Modern Compressible Flow: With Historical Perspective, 3rd ed.; McGraw-Hill: New York, NY, USA, 2003. [Google Scholar]
- Torro, E.F. Riemann Solvers and Numerical Methods for Fluid Dynamics: A Practical Introduction, 3rd ed.; Springer: Cham, Switzerland, 1997. [Google Scholar]
- Khodadadi, A.R.; Malekbala, M.R.; Khodadadi, A.F. Evaluate Shock Capturing Capability with the numerical method in OpenFOAM. J. Therm. Sci. 2013, 17, 1255–1260. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | PINN |
|---|---|
| Number of layers | 6 |
| Activation function | Tanh |
| Optimizer | Adam |
| Number of epochs | 7500 |
| Learning rate | 0.001 |
| Loss function | MSE |
| Time (s) | Element Numbers or Parameters | |
|---|---|---|
| PINN | 1948 | 4833 |
| Ansys | 1080 | 50,300 |
| 780 | 30,000 | |
| 240 | 4800 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Omarova, P.; Amirgaliyev, Y.; Kozbakova, A.; Ataniyazova, A. Application of Physics-Informed Neural Networks to River Silting Simulation. Appl. Sci. 2023, 13, 11983. https://doi.org/10.3390/app132111983
Omarova P, Amirgaliyev Y, Kozbakova A, Ataniyazova A. Application of Physics-Informed Neural Networks to River Silting Simulation. Applied Sciences. 2023; 13(21):11983. https://doi.org/10.3390/app132111983
Chicago/Turabian StyleOmarova, Perizat, Yedilkhan Amirgaliyev, Ainur Kozbakova, and Aisulyu Ataniyazova. 2023. "Application of Physics-Informed Neural Networks to River Silting Simulation" Applied Sciences 13, no. 21: 11983. https://doi.org/10.3390/app132111983
APA StyleOmarova, P., Amirgaliyev, Y., Kozbakova, A., & Ataniyazova, A. (2023). Application of Physics-Informed Neural Networks to River Silting Simulation. Applied Sciences, 13(21), 11983. https://doi.org/10.3390/app132111983