
Impact of Transition Areas on Driving Workload and Driving Behavior in Work Zones: A Naturalistic Driving Study


Abstract
:1. Introduction
2. Methodology
2.1. Length of the Transition Area
2.2. Driving Workload
3. Experiment
3.1. Participants and Vehicles
3.2. Instruments and Equipment
3.3. Experimental Roads
- ①
- Standard freeway section (S): 2000 m; 4, 3, and 2 lanes; speed limit of 80 km/h.
- ②
- Advance warning area (A): 1600 m; 4, 3, and 2 lanes; speed limit of 60 km/h.
- ③
- Transition area (B80/B120/B160/B200): From Table 1, the calculated length of the transition area on the experimental road was 120 m. Therefore, lengths of 80 m, 120 m, 160 m, and 200 m were selected to study the impact of the transition area length on drivers’ psychophysiological and driving behavior characteristics, and the number of lanes in the transition area was reduced from 4, 3, and 2 lanes to 3, 2, and 1 lanes, with a speed limit of 60 km/h.
- ④
- Buffer area + activity area (C): 200 m + 2000 m; 3, 2, and 1 lanes; speed limit of 60 km/h.
- ⑤
- Downstream transition area + termination area (D): 100 m + 40 m; from 3, 2, and 1 lanes to 4, 3, and 2 lanes; speed limit of 60 km/h.
3.4. Experimental Procedures
- ①
- Individual participants completed an information sheet indicating their gender, age, physical condition, average annual mileage, and accident history.
- ②
- Participants were informed of the experimental precautions and trained for the test, and the participants were free to drive for 20 min to familiarize with the experiment vehicle.
- ③
- Wear (install) and commission instruments and equipment.
- ④
- HRV data were collected for 5 min when the participants were calm after sitting still in the vehicle for 5 min.
- ⑤
- Participants were free to choose their lanes on the experimental road by driving their vehicles normally under free-flow conditions (q < 500 pcu/h·ln).
- ⑥
- Driving situations were recorded and the data were saved.
3.5. Data Analysis
4. Results and Analysis
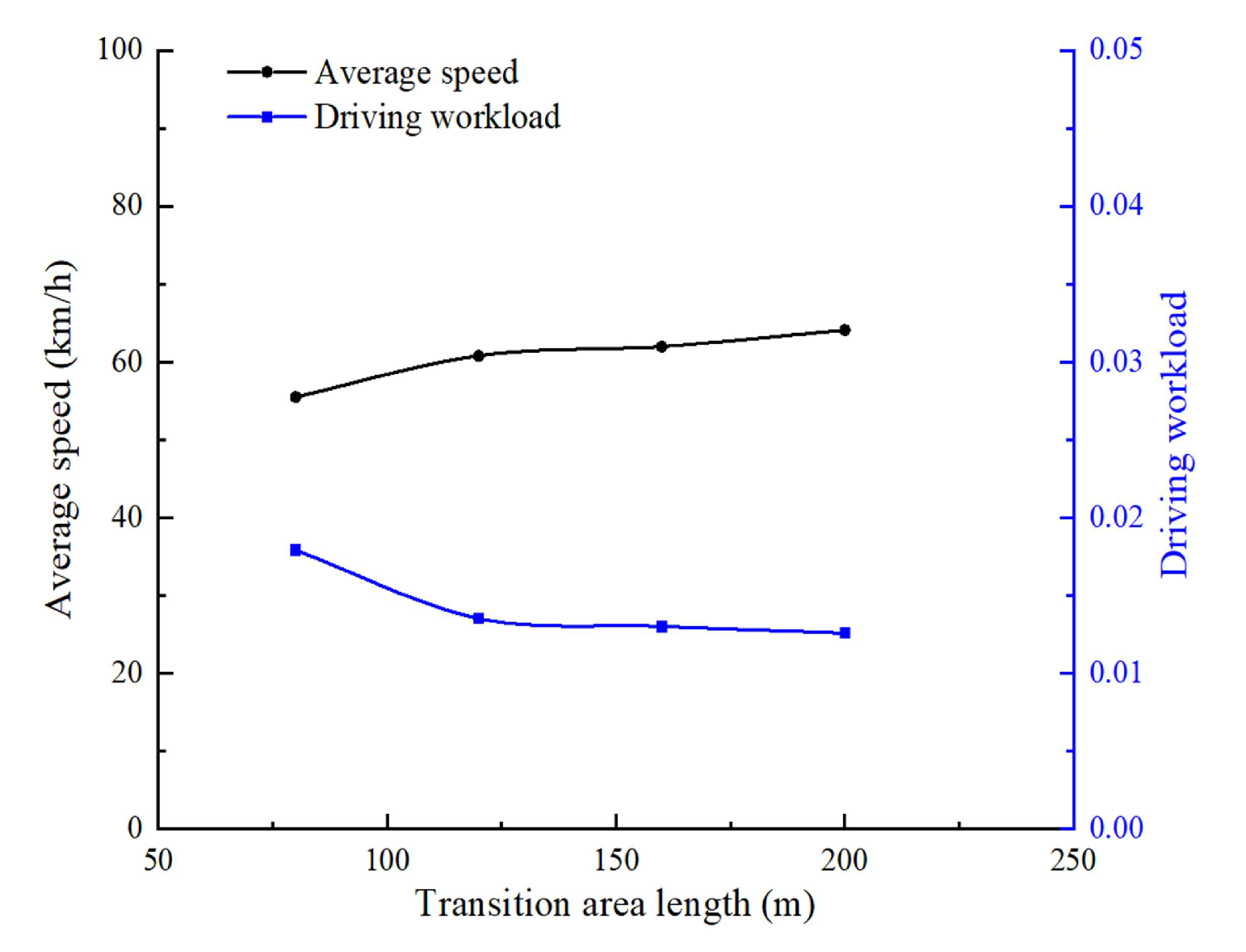
4.1. Length of the Transition Area
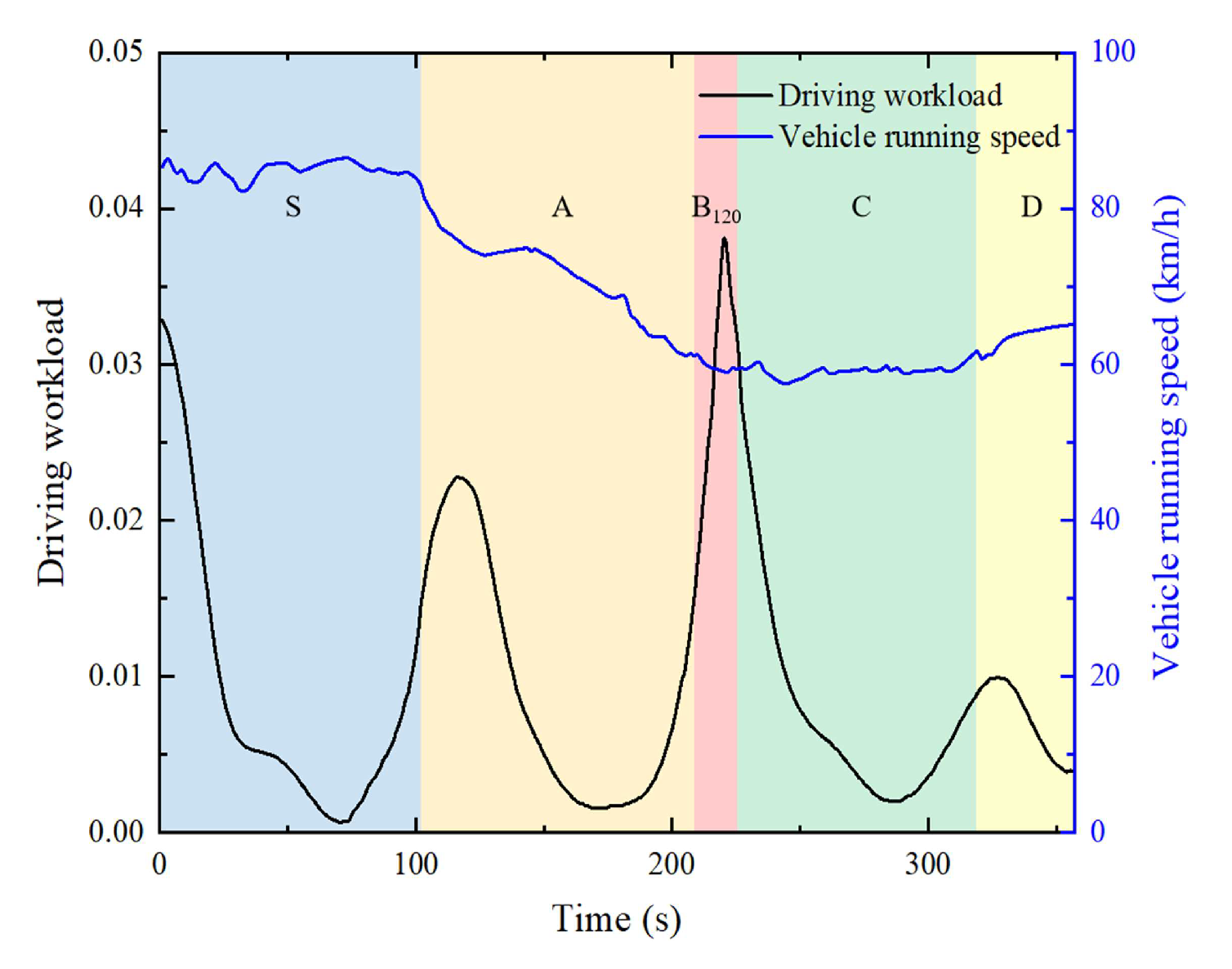
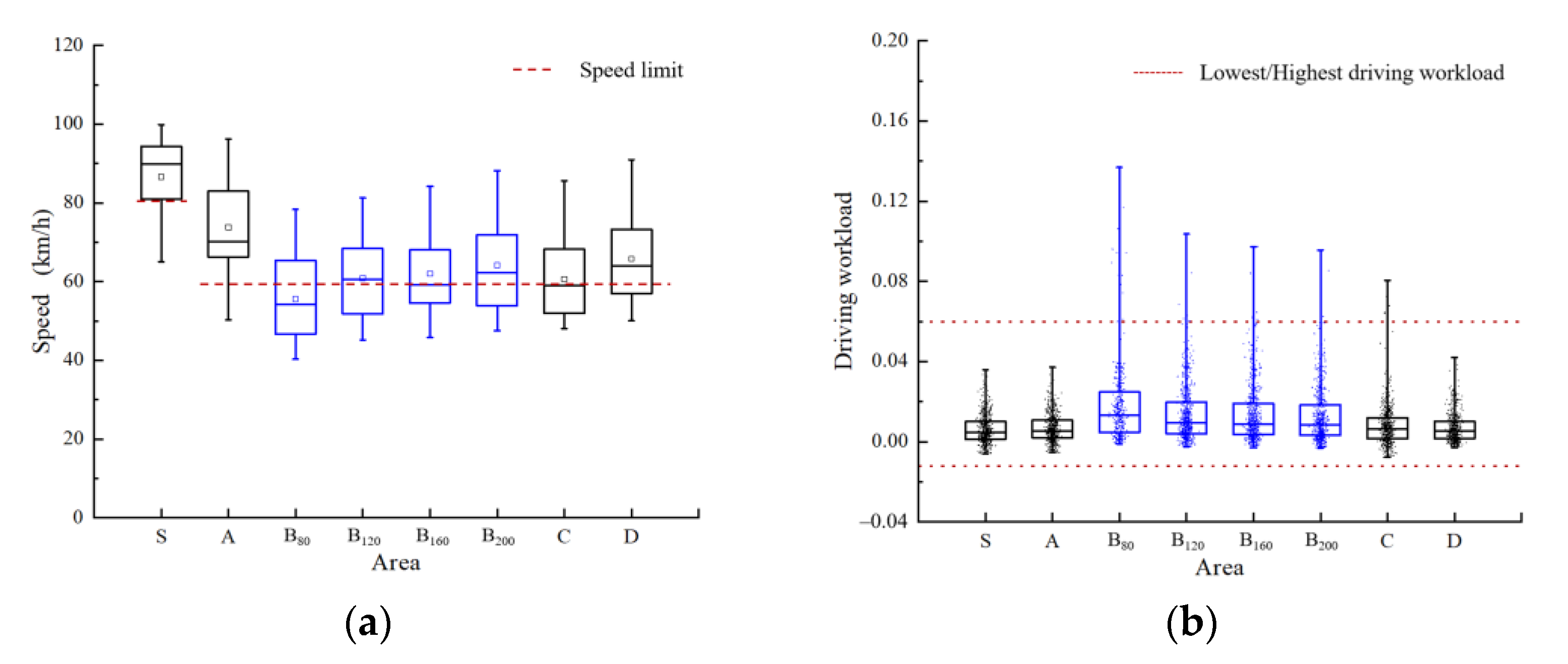
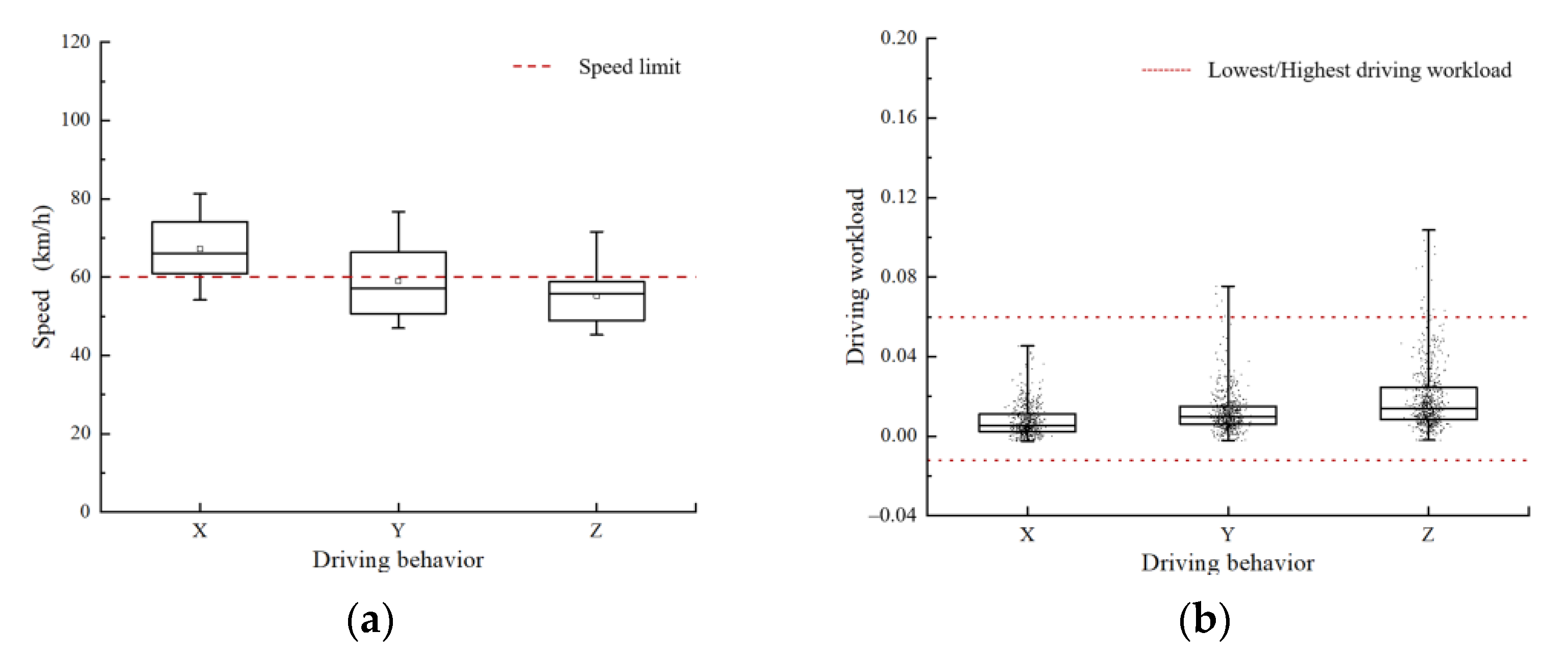
4.2. Driving Behavior
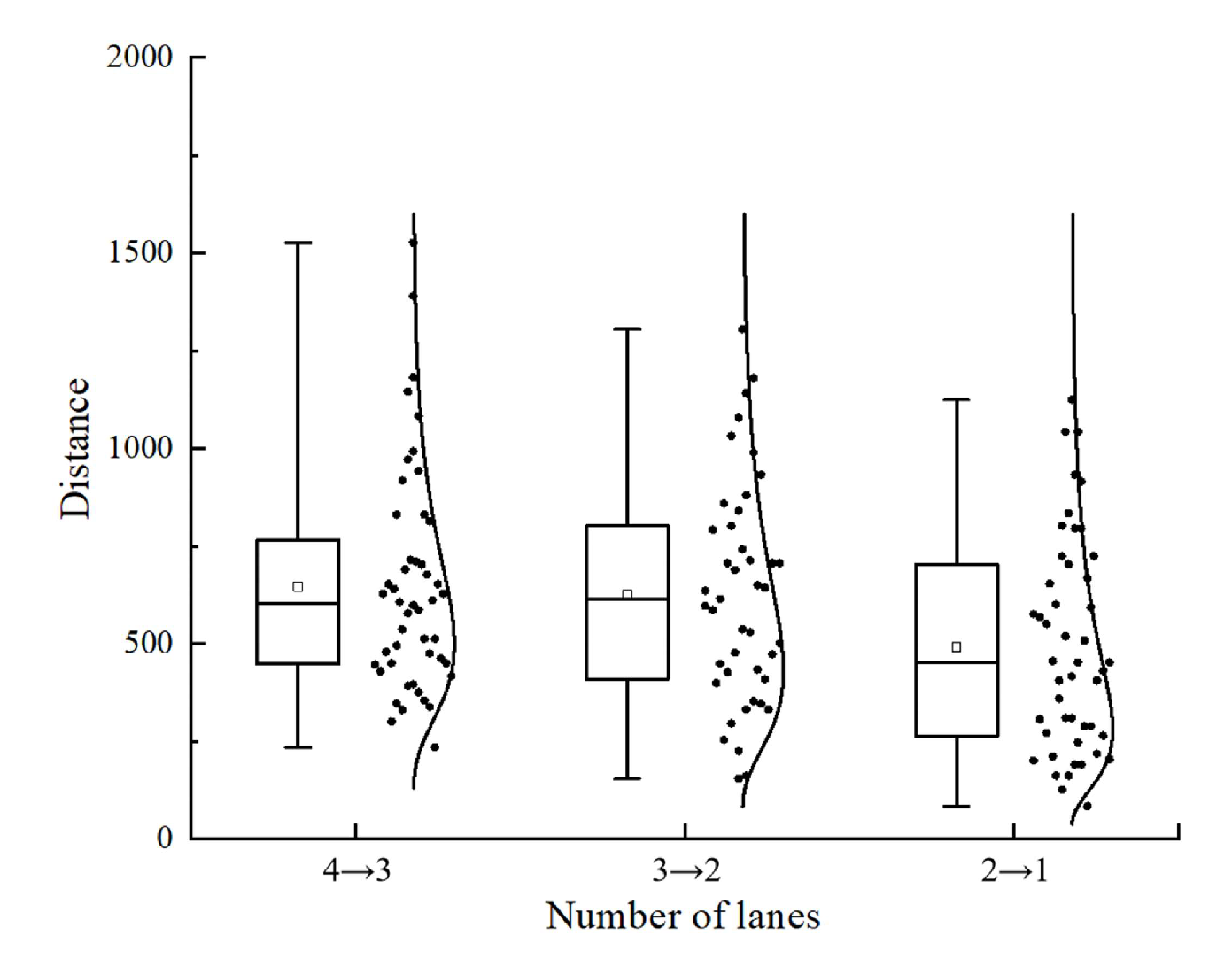
4.3. Lane Closure Form
4.4. Affected Area of the Transition Area
5. Discussion
6. Conclusions
- (1)
- Based on the driving behavior of vehicles merging into the transition area, the relationship between the critical gap and the distance traveled in the transition area was analyzed. The gap acceptance theory was used to establish a calculation method for the transition area length, and the calculated transition area length was obtained under different closed lane widths, speed limits, and traffic volumes.
- (2)
- Based on the results of our theoretical calculations, naturalistic driving experiments were conducted with 48 participants in 12 scenarios involving 3 lane closure forms and 4 transition area lengths, and the relationship of transition area with driving workload and vehicle speed was determined. A transition area that was too short or too long increased traffic safety risks; overall, the experimental results were consistent with the theoretical calculation length, and the theoretical calculation model was reliable. When the speed limit in the work zone was 60 km/h, a transition zone length of 120~160 m was more reasonable.
- (3)
- The relationship of lane closure form and driving behavior with the driving workload and vehicle speed in the transition area was analyzed. Compared to unaffected straight-through vehicles, merging vehicles and vehicles affected by merging have lower speeds, higher driving workloads, and increased traffic safety risks. An increase in the number of lanes in the transition area will result in increased driving workloads and vehicle speeds.
- (4)
- Based on the changes in vehicle deceleration points and driving workloads, the affected area of the transition area was obtained. When the speed limit was 60 km/h, the upstream affected transition areas with four, three, and two lanes were 1000 m, 850 m, and 700 m, and the downstream affected areas were 450 m, 400 m, and 350 m. In practical applications, the length and configuration of the transition area should be comprehensively determined based on the closed lane width, speed limit, traffic volume, number of lanes, driving behavior, and other factors.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Weng, J.; Qiang, M. Estimating capacity and traffic delay in work zones: An overview. Transp. Res. Part C Emerg. Technol. 2013, 35, 34–45. [Google Scholar] [CrossRef]
- Thapa, R.; Codjoe, J.; Osafo, A. Survey of work zone practices and validation of highway capacity manual work zone capacity model. Transp. Res. Rec. 2021, 2675, 1083–1091. [Google Scholar] [CrossRef]
- Cheng, Y.; Parker, S.T.; Ran, B.; Noyce, D.A. Enhanced analysis of work zone safety through integration of statewide crash and lane closure system data. Transp. Res. Rec. 2012, 2291, 17–25. [Google Scholar] [CrossRef]
- Khattak, A.J.; Khattak, A.J.; Council, F.M. Effects of work zone presence on injury and non-injury crashes. Accid. Anal. Prev. 2002, 34, 19–29. [Google Scholar] [CrossRef] [PubMed]
- Work Zone Facts and Statistics Retrieved. Available online: https://workzonesafety.org/work-zone-data (accessed on 1 September 2023).
- Chen, E.; Tarko, A.P. Modeling safety of highway work zones with random parameters and random effects models. Anal. Methods Accid. R. 2014, 1, 86–95. [Google Scholar] [CrossRef]
- Zhang, K.; Hassan, M.; Yahaya, M.; Yang, S. Analysis of work-zone crashes using the ordered probit model with factor analysis in Egypt. J. Adv. Transp. 2018, 2018, 1784. [Google Scholar] [CrossRef]
- Kummetha, V.C.; Kondyli, A.; Chrysikou, E.G.; Schrock, S.D. Safety analysis of work zone complexity with respect to driver characteristics—A simulator study employing performance and gaze measures. Accid. Anal. Prev. 2020, 142, 105566. [Google Scholar] [CrossRef] [PubMed]
- Nasrollahzadeh, A.A.; Sof, A.R.; Ravani, B. Identifying factors associated with roadside work zone collisions using machine learning techniques. Accid. Anal. Prev. 2021, 158, 106203. [Google Scholar] [CrossRef] [PubMed]
- Osman, M.; Paleti, R.; Mishra, S. Analysis of passenger-car crash injury severity in different work zone configurations. Accid. Anal. Prev. 2018, 111, 161–172. [Google Scholar] [CrossRef]
- Hou, G.; Chen, S. An improved cellular automaton model for work zone traffic simulation considering realistic driving behavior. J. Phys. Soc. Jpn. 2019, 88, 084001. [Google Scholar] [CrossRef]
- Lu, C.; Dong, J.; Sharma, A.; Huang, T.; Knickerbocker, S. Predicting freeway work zone capacity distribution based on logistic speed-density models. J. Adv. Transp. 2018, 1442, 9614501. [Google Scholar] [CrossRef]
- Jing, D.; Song, C.; Guo, Z.; Li, R. Influence of the median opening length on driving behaviors in the crossover work zone-A driving simulation study. Transp. Res. Part F Traffic Psychol. Behav. 2021, 82, 333–347. [Google Scholar] [CrossRef]
- Garber, N.J.; Zhao, M. Distribution and characteristics of crashes at different work zone locations in Virginia. Transp. Res. Rec. 2002, 1794, 19–25. [Google Scholar] [CrossRef]
- Bidkar, O.; Arkatkar, S.; Joshi, G.; Easa, S.M.M. Effect of construction work zone on rear-end conflicts by vehicle type under heterogeneous traffic conditions. J. Transp. Eng. A Syst. 2023, 149, 05023001. [Google Scholar] [CrossRef]
- Wang, Z.; He, W.; Zhang, X.; Wang, Y.; Wu, B.; Wang, Y. Lane-based vehicular speed characteristics analysis for freeway work zones using aerial videos. Can. J. Civil Eng. 2021, 48, 274–283. [Google Scholar] [CrossRef]
- Zhang, C.; Wang, B.; Yang, S.; Zhang, M.; Gong, Q.; Zhang, H. The driving risk analysis and evaluation in rightward zone of expressway reconstruction and extension engineering. J. Adv. Transp. 2020, 2020, 8943463. [Google Scholar] [CrossRef]
- Wang, Z.; Lee, J. Enhancing construction truck safety at work zones: A microscopic traffic simulation study. IEEE Access 2021, 9, 49750–49759. [Google Scholar] [CrossRef]
- Khanfar, N.O.; Ashqar, H.I.; Elhenawy, M.; Hussain, Q.; Hasasneh, A.; Alhajyaseen, W.K.M. Application of unsupervised machine learning classification for the analysis of driver behavior in work zones in the state of Qatar. Sustainability 2022, 14, 15184. [Google Scholar] [CrossRef]
- Wu, B.; Zou, C.; Li, Y.; Fan, D.; Zhu, S. Impact of road environment on drivers’ preference to merging location selection in freeway work zone merging areas. J. Adv. Transp. 2022, 2022, 2996081. [Google Scholar] [CrossRef]
- Duan, K.; Yan, X.; Ma, L.; Hang, J.; Li, X. A multistage analytic model of the longitudinal and lateral acceleration during lane changing in work zone areas with the aid of a driving simulator experiment. Transp. Lett. 2020, 14, 28–38. [Google Scholar] [CrossRef]
- Weng, J.; Meng, Q. Rear-end crash potential estimation in the work zone merging areas. J. Adv. Transp. 2014, 48, 238–249. [Google Scholar] [CrossRef]
- Morgan, J.F.; Duley, A.R.; Hancock, P.A. Driver responses to differing urban work zone configurations. Accid. Anal. Prev. 2010, 42, 978–985. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.; Kim, D. The proper length of transition area for work zones on urban freeways. Korean Soc. Transp. 2013, 31, 58–66. [Google Scholar] [CrossRef]
- Shakouri, M.; Ikuma, L.H.; Aghazadeh, F.; Punniaraj, K.; Ishak, S. Effects of work zone configurations and traffic density on performance variables and subjective workload. Accid. Anal. Prev. 2014, 71, 166–176. [Google Scholar] [CrossRef] [PubMed]
- Ishak, S.; Qi, Y.; Rayaprolu, P. Safety evaluation of joint and conventional lane merge configurations for freeway work zones. Traffic Inj. Prev. 2012, 13, 199–208. [Google Scholar] [CrossRef] [PubMed]
- Idewu, W.I.A.; Wolshon, B. Joint merge and its impact on merging speeds in lane reduction areas of construction zone. Transp. Res. Rec. 2010, 2169, 31–39. [Google Scholar] [CrossRef]
- Weng, J. Collision avoidance analysis for transition taper length. Transp. Plan. Technol. 2011, 34, 811–822. [Google Scholar] [CrossRef]
- Pawar, N.M.; Velaga, N.R.; Sharmila, R.B. Exploring behavioral validity of driving simulator under time pressure driving conditions of professional drivers. Transp. Res. Part F Traffic Psychol. Behav. 2022, 89, 67–78. [Google Scholar] [CrossRef]
- Karimi, A.; Bassani, M.; Boroujerdian, A.M.; Catani, L. Investigation into passing behavior at passing zones to validate and extend the use of driving simulators in two-lane roads safety analysis. Accid. Anal. Prev. 2020, 139, 105487. [Google Scholar] [CrossRef]
- FHWA|U.S. Department of Transportation. Manual on Uniform Traffic Control Devices; FHWA: Washington, DC, USA, 2009; pp. 547–559. [Google Scholar]
- Ma, S.; Hu, J.; Wang, R.; Qu, S. Study on the median opening length of a freeway work zone based on a naturalistic driving experiment. Appl. Sci. 2023, 13, 851. [Google Scholar] [CrossRef]
- Ma, S.; Hu, J.; Ma, E.; Li, W.; Wang, R. Cluster analysis of freeway tunnel length based on naturalistic driving safety and comfort. Sustainability 2023, 15, 11914. [Google Scholar] [CrossRef]
- Wei, W.; Fu, X.; Zhong, S.; Ge, H. Driver’s mental workload classification using physiological, traffic flow and environmental factors. Transp. Res. Part F Traffic Psychol. Behav. 2023, 94, 151–169. [Google Scholar] [CrossRef]
- Zhang, Z.; Akinci, B.; Qian, S. How effective is reducing traffic speed for safer work zones? Methodology and a case study in Pennsylvania. Accid. Anal. Prev. 2023, 183, 106966. [Google Scholar] [CrossRef] [PubMed]
- Du, S.; Razavi, S. Variable speed limit for freeway work zone with capacity drop using discrete-time sliding mode control. J. Comput. Civil Eng. 2019, 33, 04019001. [Google Scholar] [CrossRef]
- Hu, J.; He, L.; Wang, R. Safety evaluation of freeway interchange merging areas based on driver workload theory. Sci. Prog. 2020, 103, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Kianfar, J.; Abdoli, S. Deterministic and stochastic capacity in work zones: Findings from a long-term work zone. J. Transp. Eng. A Syst. 2021, 147, 04020141. [Google Scholar] [CrossRef]
- Dong, C.; Shao, C.; Clarke, D.B.; Nambisan, N.N. An innovative approach for traffic crash estimation and prediction on accommodating unobserved heterogeneities. Transp. Res. B Methodol. 2018, 118, 407–428. [Google Scholar] [CrossRef]
- Wang, P.; Zhu, S.; Zhao, X. Identification and factor analysis of traffic conflicts in the merge area of freeway work zone. Sustainability 2023, 15, 11314. [Google Scholar] [CrossRef]
- Cheng, Y.; Wu, K.; Li, H.; Parker, S.; Ran, B.; Noyce, D. Work zone crash occurrence prediction based on planning stage work zone configurations using an artificial neural network. Transp. Res. Rec. 2022, 2676, 377–384. [Google Scholar] [CrossRef]
- Chang, Y.; Bharadwaj, N.; Edara, P.; Sun, C. Exploring contributing factors of hazardous events in construction zones using naturalistic driving study data. IEEE Trans. Intell. Veh. 2020, 5, 519–527. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Survey Time | Traffic Volume (pcu/h) | Maximum Time Headway (s) | Minimum Time Headway (s) | Mean Time Headway (s) | SD |
|---|---|---|---|---|---|
| A | 537 | 20.61 | 0.83 | 6.32 | 5.53 |
| B | 1011 | 15.37 | 0.79 | 3.59 | 2.80 |
| C | 1468 | 11.88 | 0.76 | 2.75 | 1.95 |
| Closed Lane Width (m) | 3.25 | 3.5 | 3.75 | |||||||
| Traffic Volume (pcu/h) | 500 | 1000 | 1500 | 500 | 1000 | 1500 | 500 | 1000 | 1500 | |
| Speed Limit (km/h) | 40 | 55 | 75 | 100 | 70 | 85 | 110 | 80 | 100 | 120 |
| 50 | 70 | 95 | 125 | 85 | 110 | 135 | 100 | 120 | 150 | |
| 60 | 85 | 115 | 150 | 100 | 130 | 165 | 120 | 145 | 180 | |
| 70 | 100 | 130 | 175 | 120 | 150 | 190 | 140 | 170 | 210 | |
| 80 | 115 | 150 | 200 | 135 | 175 | 220 | 160 | 195 | 240 | |
| Driving Workload Degree | Safety Level | Driving Workload |
|---|---|---|
| Highest | Highly risky (nervous) | Ki > 0.060 |
| Higher | Relatively risky (relatively nervous) | 0.030 < Ki ≤ 0.060 |
| Normal | Safe | −0.001 < Ki ≤ 0.030 |
| Lower | Relatively risky (relatively fatigued) | −0.012 < Ki ≤ −0.001 |
| Lowest | Highly risky (fatigue) | Ki ≤ −0.012 |
| Area | Maximum Speed (km/h) | Minimum Speed (km/h) | Mean Speed (km/h) | SD | Speed Limit Compliance Rate |
|---|---|---|---|---|---|
| S | 99.84 | 65.06 | 86.56 | 9.96 | 20.85% |
| A | 96.21 | 50.28 | 73.77 | 11.80 | 8.52% |
| B80 | 78.30 | 40.26 | 55.52 | 11.83 | 59.84% |
| B120 | 81.28 | 45.21 | 60.81 | 9.75 | 50.15% |
| B160 | 86.14 | 45.81 | 62.00 | 10.37 | 48.16% |
| B200 | 90.13 | 47.52 | 64.12 | 11.63 | 33.61% |
| C | 85.63 | 48.06 | 60.60 | 9.22 | 59.63% |
| D | 90.96 | 50.06 | 65.77 | 10.18 | 36.44% |
| Area | Maximum | Minimum | Mean | SD | Higher-Risk Ratio | High-Risk Ratio |
|---|---|---|---|---|---|---|
| S | 0.03584 | −0.00588 | 0.00614 | 0.00709 | 5.68% | 0.00% |
| A | 0.03715 | −0.00541 | 0.00661 | 0.00720 | 3.87% | 0.00% |
| B80 | 0.15684 | −0.00105 | 0.01793 | 0.01987 | 17.15% | 3.69% |
| B120 | 0.10358 | −0.00245 | 0.01354 | 0.01350 | 11.44% | 0.88% |
| B160 | 0.09735 | −0.00304 | 0.01302 | 0.01342 | 11.20% | 0.73% |
| B200 | 0.09555 | −0.00320 | 0.01259 | 0.01340 | 11.16% | 0.70% |
| C | 0.08032 | −0.00780 | 0.00794 | 0.01034 | 5.51% | 0.51% |
| D | 0.04206 | −0.00295 | 0.00697 | 0.00742 | 3.62% | 0.00% |
| Area | A | B80 | B120 # | B160 # | B200 | C # |
|---|---|---|---|---|---|---|
| A | - | 18.25 | 12.96 | 11.77 | 9.65 | - |
| B80 | −18.25 | - | −5.29 | −6.48 | −8.60 | –5.08 |
| B120 # | −12.96 | 5.29 | - | −1.19 * | −3.31 | 0.21 * |
| B160 # | −11.77 | 6.48 | 1.19 * | - | −2.12 | 1.40 * |
| B200 | −9.65 | 8.60 | 3.31 | 2.12 | - | 3.52 |
| C # | - | 5.08 | −0.21 * | −1.40 * | −3.52 | - |
| Area | A | B80 | B120 | B160 | B200 | C |
|---|---|---|---|---|---|---|
| A | - | −0.01132 | −0.00693 | −0.00641 | −0.00598 | - |
| B80 | 0.01132 | - | 0.00439 | 0.00491 | 0.00534 | 0.00999 |
| B120 | 0.00693 | −0.00439 | - | 0.00052 * | 0.00095 * | 0.00560 |
| B160 | 0.00641 | −0.00491 | −0.00052 * | - | 0.00043 * | 0.00508 |
| B200 | 0.00598 | −0.00534 | −0.00095 * | −0.00043 * | - | 0.00465 |
| C | - | −0.00999 | −0.00560 | −0.00508 | −0.00465 | - |
| Lane | Large Vehicle | Medium Vehicle | Small Vehicle | |
|---|---|---|---|---|
| 2 → 1 lanes | 1 | 23% | 23% | 54% |
| 3 → 2 lanes | 1 | 24% | 13% | 63% |
| 2 | 35% | 28% | 37% | |
| 4 → 3 lanes | 1 | 5% | 4% | 91% |
| 2 | 34% | 14% | 52% | |
| 3 | 59% | 10% | 31% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, S.; Hu, J.; Wang, R. Impact of Transition Areas on Driving Workload and Driving Behavior in Work Zones: A Naturalistic Driving Study. Appl. Sci. 2023, 13, 11669. https://doi.org/10.3390/app132111669
Ma S, Hu J, Wang R. Impact of Transition Areas on Driving Workload and Driving Behavior in Work Zones: A Naturalistic Driving Study. Applied Sciences. 2023; 13(21):11669. https://doi.org/10.3390/app132111669
Chicago/Turabian StyleMa, Sen, Jiangbi Hu, and Ronghua Wang. 2023. "Impact of Transition Areas on Driving Workload and Driving Behavior in Work Zones: A Naturalistic Driving Study" Applied Sciences 13, no. 21: 11669. https://doi.org/10.3390/app132111669
APA StyleMa, S., Hu, J., & Wang, R. (2023). Impact of Transition Areas on Driving Workload and Driving Behavior in Work Zones: A Naturalistic Driving Study. Applied Sciences, 13(21), 11669. https://doi.org/10.3390/app132111669