Observing Material Properties in Composite Structures from Actual Rotations





Abstract
:1. Introduction
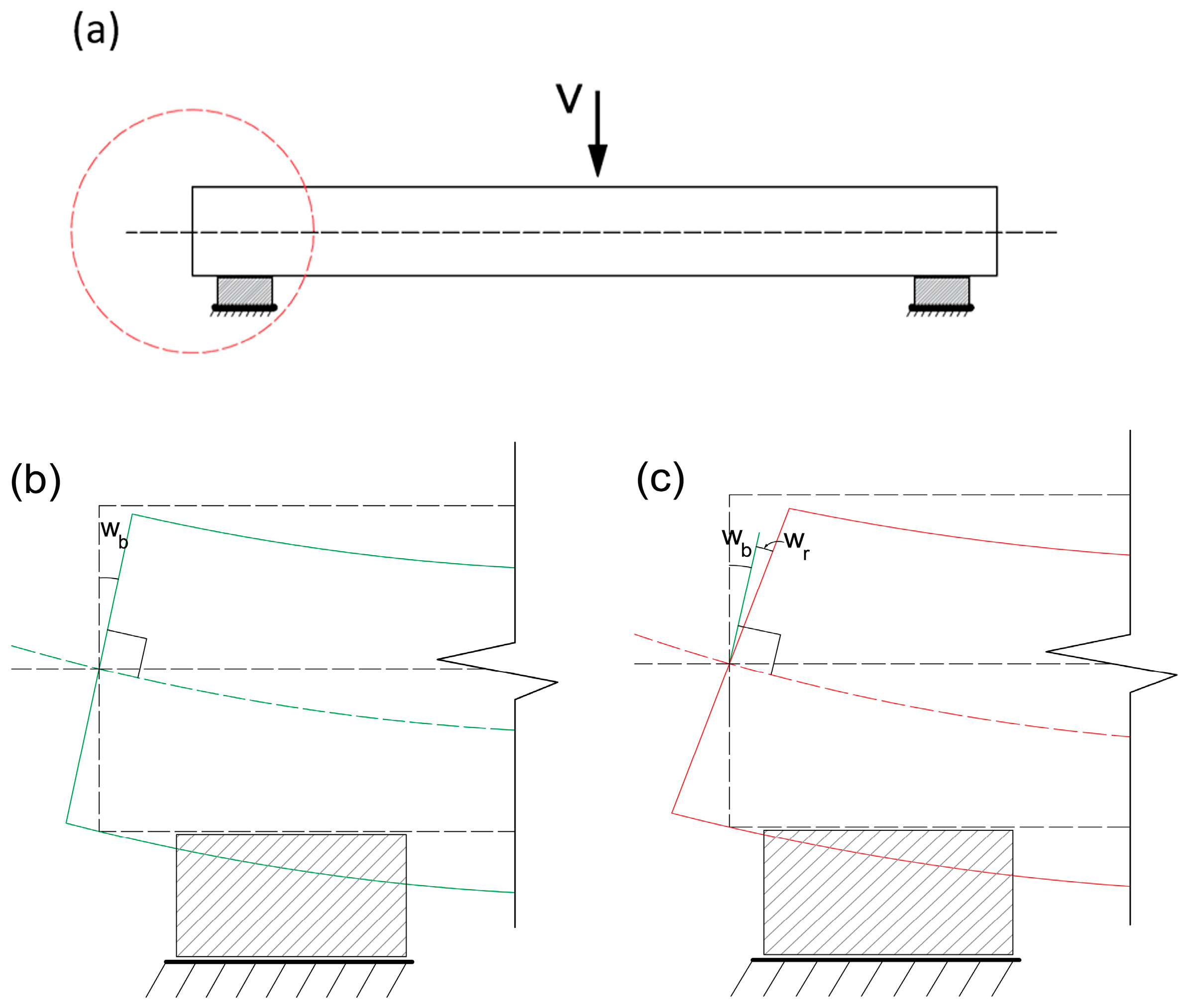
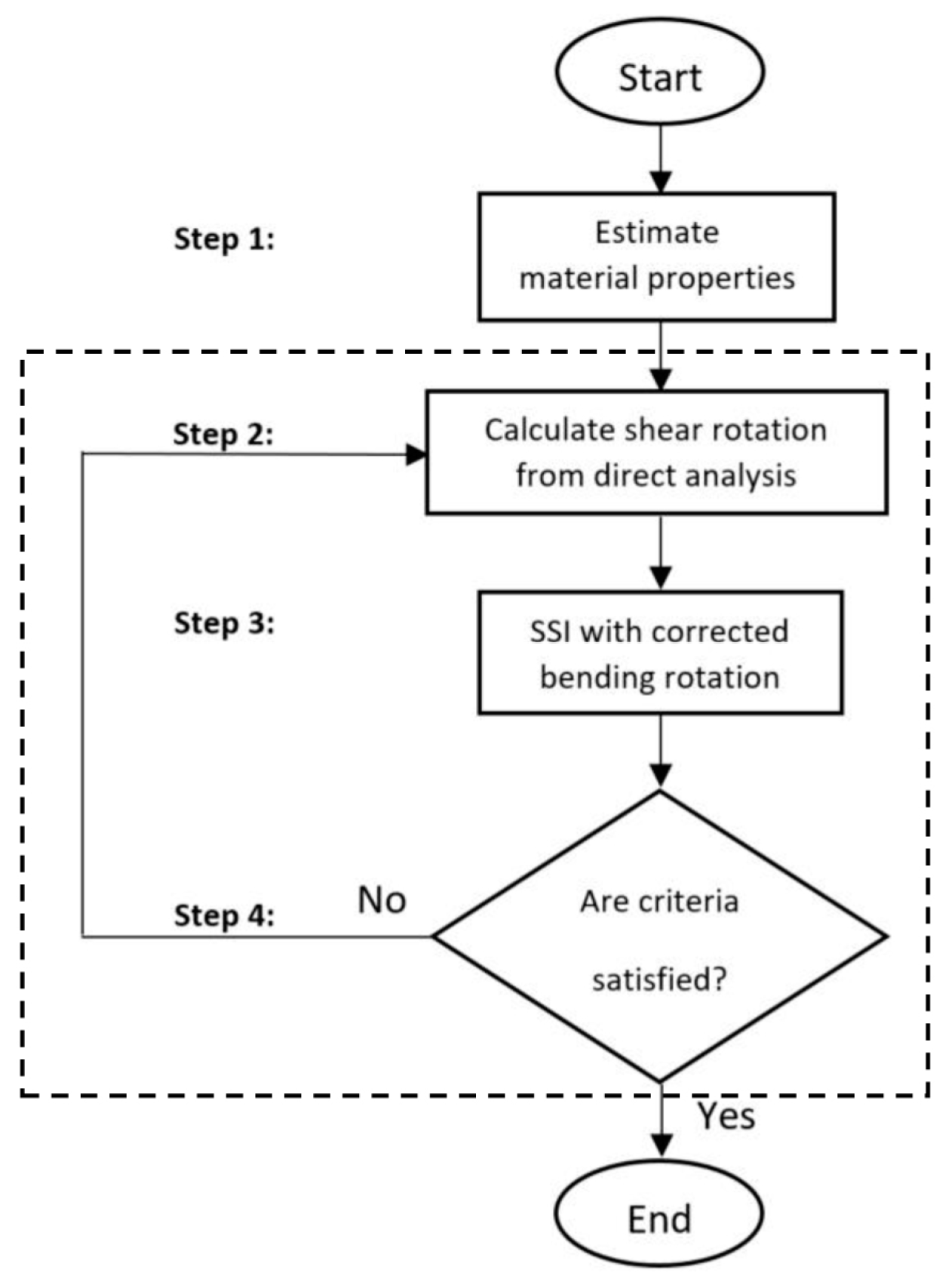
2. Materials and Methods
3. Results
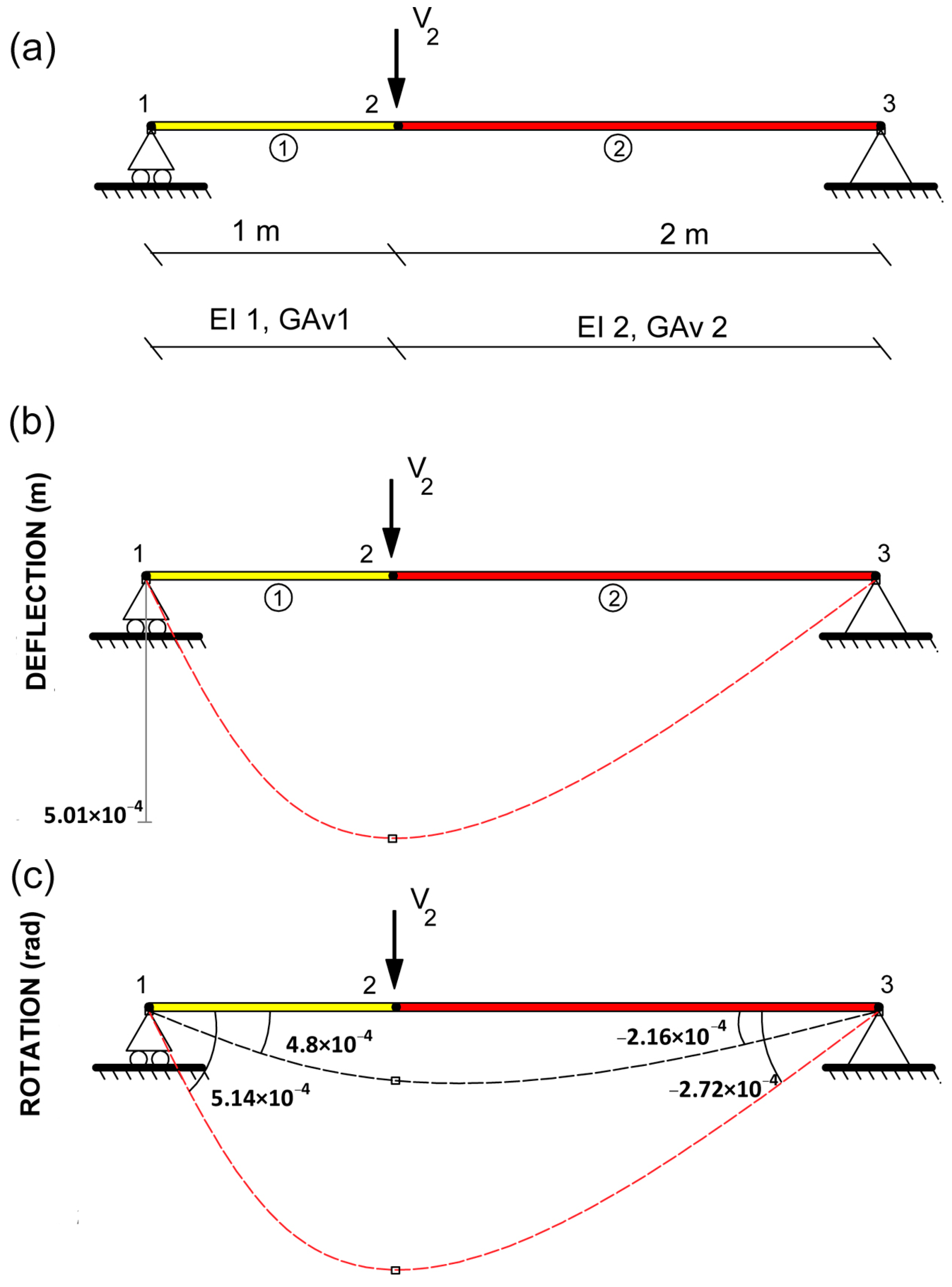
3.1. Example 1: Simply Supported Beam with Two-Iteration Processes
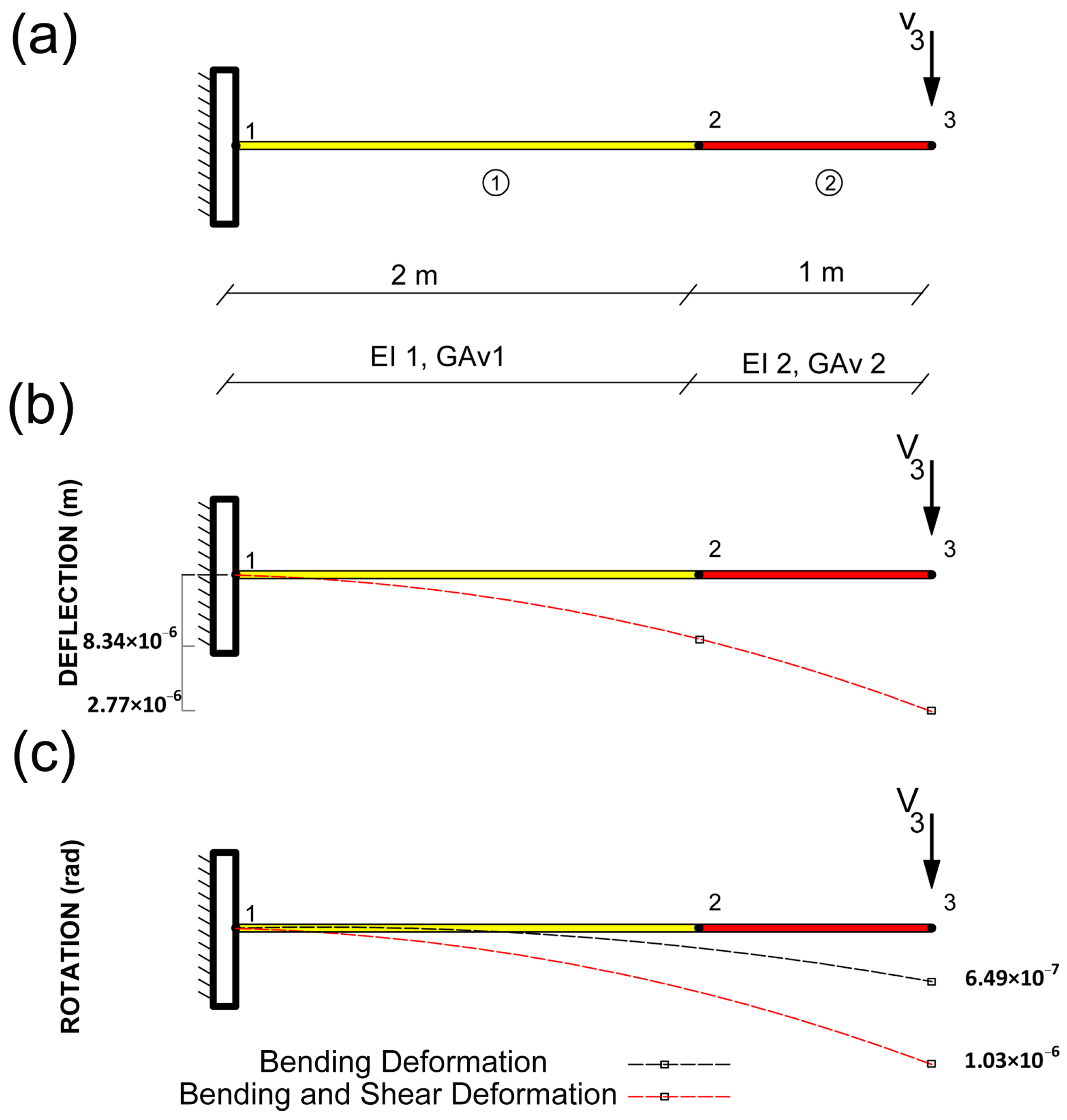
3.2. Example 2: Cantilever Beam with Two-Iteration Processes
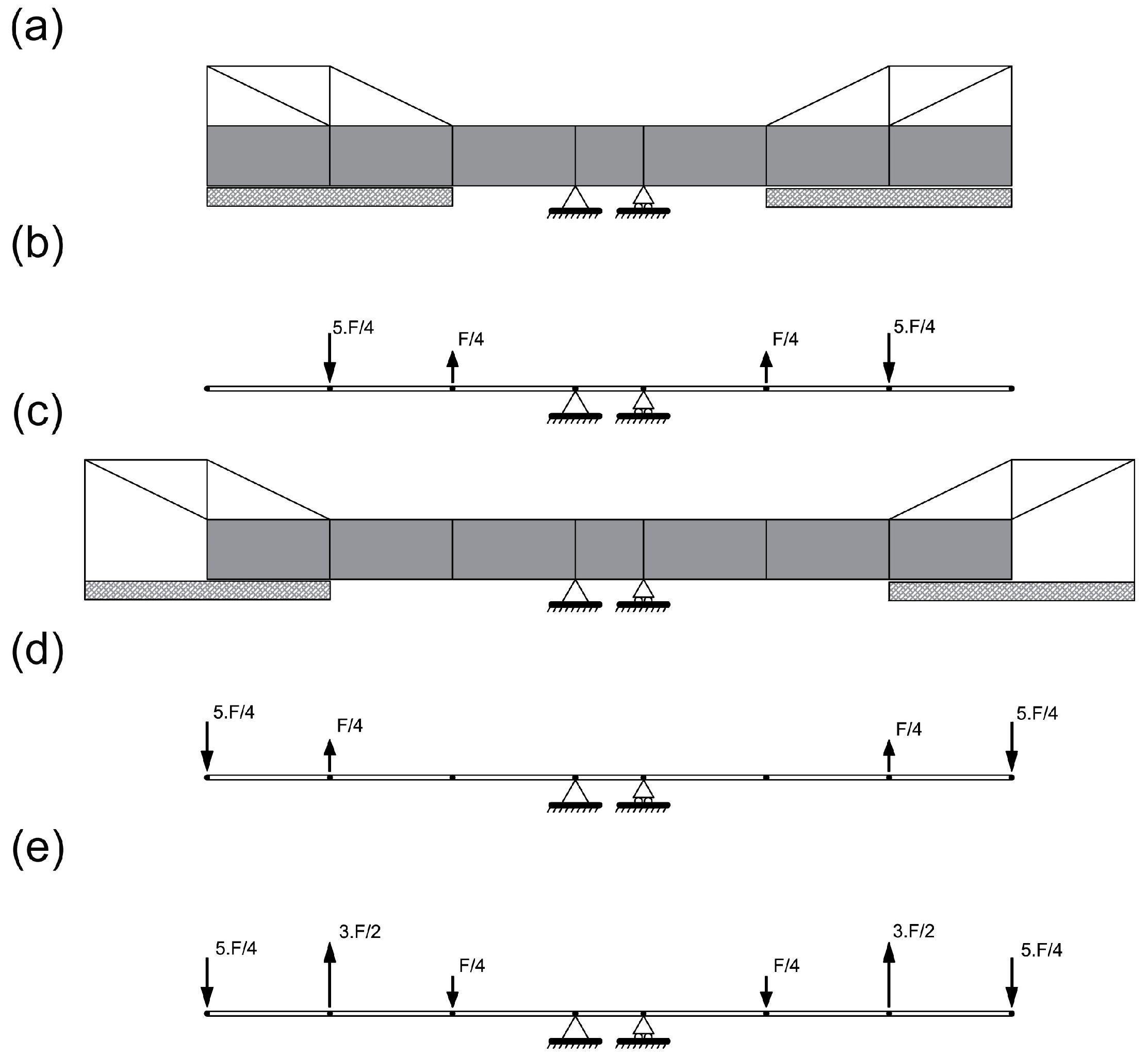
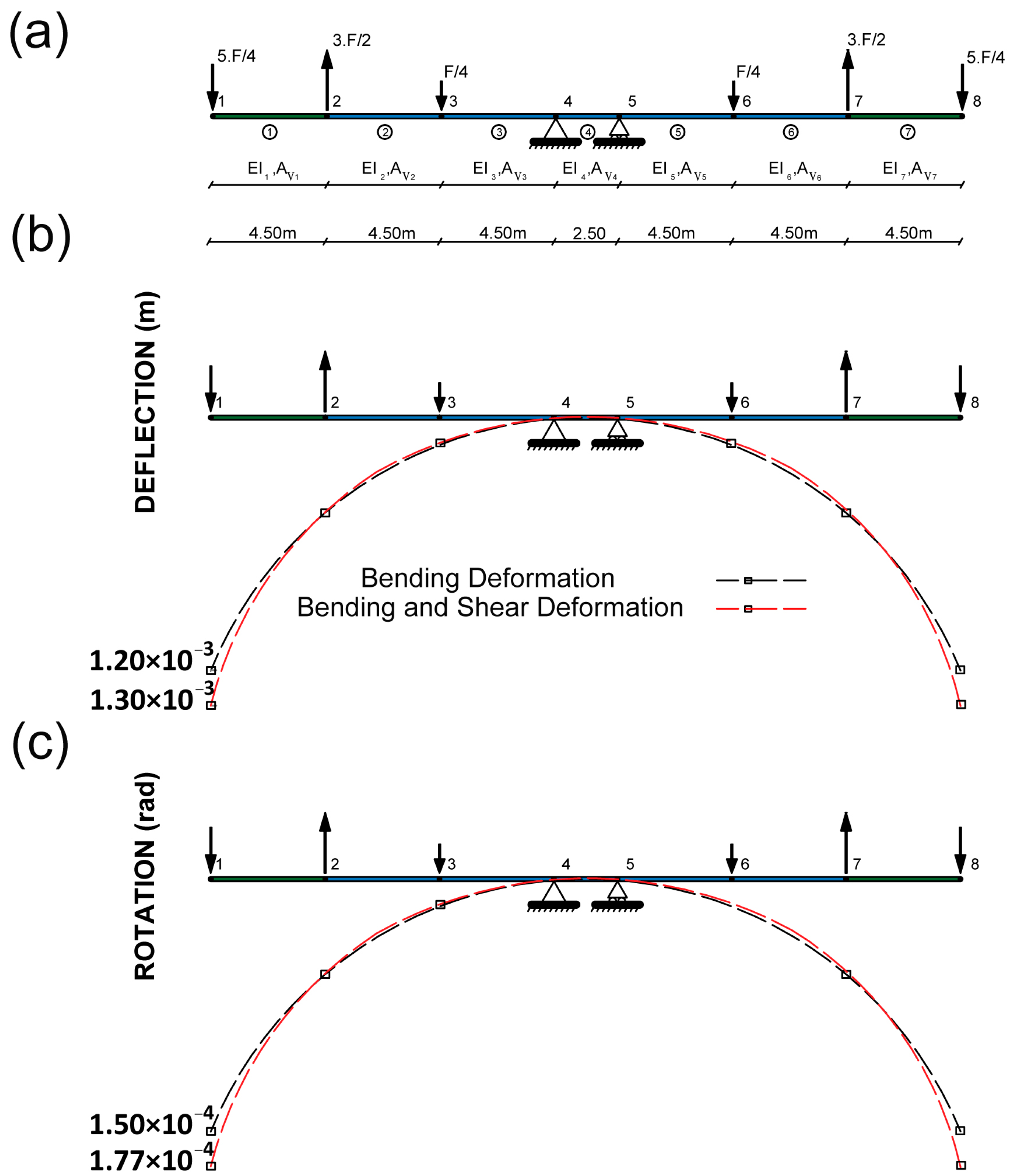
3.3. Example 3: Application to a Simplified Model of a Composite Bridge
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Albero, V.; Espinós, A.; Serra, E.; Romero, M.L.; Hospitaler, A. Numerical study on the flexural behaviour of slim-floor beams with hollow core slabs at elevated temperature. Eng. Struct. 2019, 180, 561–573. [Google Scholar] [CrossRef]
- Turgut, C.; Jason, L.; Davenne, L. Structural-scale modeling of the active confinement effect in the steel-concrete bond for reinforced concrete structures. Finite Elem. Anal. Des. 2020, 172, 103386. [Google Scholar] [CrossRef]
- Weaver, W.; Were, J.M. Computer-Oriented Direct Stiffness Method. In Matrix Analysis of Framed Structures; Springer: Boston, MA, USA, 1990. [Google Scholar] [CrossRef]
- Sadowski, A.J. On the advantages of hybrid beam-shell structural finite element models for the efficient analysis of metal wind turbine support towers. Finite Elem. Anal. Des. 2019, 162, 19–33. [Google Scholar] [CrossRef]
- Kawano, A.; Zine, A. Reliability evaluation of continuous beam structures using data concerning the displacement of points in a small region. Eng. Struct. 2019, 80, 379–387. [Google Scholar] [CrossRef]
- Aguirre, A.; Codina, R.; Baiges, J. A variational multiscale stabilized finite element formulation for Reissner–Mindlin plates and Timoshenko beams. Finite Elem. Anal. Des. 2023, 217, 103908. [Google Scholar] [CrossRef]
- Ozdagli, A.I.; Liu, B.; Moreu, F. Measuring Total Transverse Reference-Free Displacements for Condition Assessment of Timber Railroad Bridges: Experimental Validation. J. Struct. Eng. 2018, 144, 040180471. [Google Scholar] [CrossRef]
- Liu, S.; D Ziemian, R.; Chen, L.; Chan, S.-L. Bifurcation and large-deflection analyses of thin-walled beam-columns withnon-symmetric open-sections. Thin-Walled Struct. 2018, 132, 287–301. [Google Scholar] [CrossRef]
- Dahake, A.; Ghugal, Y.; Uttam, B.; Kalwane, U.B. Displacements in Thick Beams using Refined Shear Deformation Theory. In Proceedings of the 3rd International Conference on Recent Trends in Engineering & Technology, Cochin, India, 18 January 2014. [Google Scholar]
- Tomas, D.; Lozano-Galant, J.A.; Ramos, G.; Turmo, J. Structural system identification of thin web bridges by observability techniques considering shear deformation. Thin-Walled Struct. 2018, 123, 282–293. [Google Scholar] [CrossRef]
- Dym, C.L.; Williams, H.E. Estimating Fundamental Frequencies of Tall Buildings. J. Struct. Eng. 2007, 133, 1479–1483. [Google Scholar] [CrossRef]
- Yan, J.; Zhou, B.; Yang, Z.; Xu, L.; Hu, H. Mechanism exploration and effective analysis method of shear effect of helically wound structures. Finite Elem. Anal. Des. 2022, 212, 103840. [Google Scholar] [CrossRef]
- EN 1992-1-1; Eurocode 2: Design of Concrete Structures—Part 1-1: General Rules and Rules for Buildings. CEN: Brussels, Belgium, 2002.
- ACI Committee 318. Building Code Requirements for Structural Concrete and Commentary; American Concrete Institute: Detroit, MI, USA, 2000. [Google Scholar]
- Timoshenko, S.P. On the correction for shear of the differential equation for transverse vibrations of prismatic bars. Philos. Mag. 1921, 41, 742–746. [Google Scholar] [CrossRef]
- CSI. CSI Analysis Reference Manual for SAP2000, ETABS, SAFE and CSiBridge; Computers and Structure, Inc.: Berkeley, CA, USA, 2016. [Google Scholar]
- Keo, P.; Nguyen, Q.-H.; Somja, H.; Hjiaj, M. Derivation of the exact stiffness matrix of shear-deformable multi-layered beam element in partial interaction. Finite Elem. Anal. Des. 2016, 112, 40–49. [Google Scholar] [CrossRef]
- Pisano, A.A. Structural System Identification: Advanced Approaches and Applications. Ph.D. Thesis, Università di Pavia, Pavia, Italy, 1999. [Google Scholar]
- Zhang, F.; Yang, Y.; Xiong, H.; Yang, J.; Yu, Z. Structural health monitoring of a 250-m super-tall building and operational modal analysis using the fast bayesian FFT method. Struct. Control Health Monit. 2019, 26, e2383. [Google Scholar] [CrossRef]
- Lu, Y.; Panagiotou, M. Three-Dimensional Cyclic Beam-Truss Model for Nonplanar Reinforced Concrete Walls. J. Struct. Eng. 2014, 140, 04013071. [Google Scholar] [CrossRef]
- Reddy, J.N. An Introduction to the Finite Element Method; McGraw-Hill Education: New York, NY, USA, 2006; ISBN 9780072466850. [Google Scholar]
- Pickhaver, J.A. Numerical Modelling of Building Response to Tunneling. Ph.D. Thesis, University of Oxford, Oxford, UK, 2006. [Google Scholar]
- Przemieniecki, J.S. Theory of Matrix Structural Analysis; Courier Corporation: Chelmsford, MA, USA, 1968; p. 19151. [Google Scholar]
- Emadi, S.; Ma, H.; Lozano-Galant, J.A.; Turmo, J. Simplified Calculation of Shear Rotations for First-Order Shear Deformation Theory in Deep Bridge Beams. Appl. Sci. 2023, 13, 3362. [Google Scholar] [CrossRef]
- Sirca, G.F., Jr.; Adeli, H. System identification in structural engineering. Sci. Iran. 2012, 19, 1355–1364. [Google Scholar] [CrossRef]
- Pereira, R.L.; Lopes, H.N.; Pavanello, R. Topology optimization of acoustic systems with a multiconstrained BESO approach. Finite Elem. Anal. Des. 2022, 201, 103701. [Google Scholar] [CrossRef]
- Sun, R.; Chen, G.; He, H.; Zhang, B. The impact force identification of composite stiffened panels under material uncertainty. Finite Elem. Anal. Des. 2014, 81, 38–47. [Google Scholar] [CrossRef]
- Gevers, M. A personal view of the development of system identification: A 30-year journey through an exciting field. IEEE Control Syst. 2006, 26, 93–105. [Google Scholar]
- Hoang, T.; Foret, G.; Duhamel, D. Dynamical response of a Timoshenko beams on periodical nonlinear supports subjected to moving forces. Eng. Struct. 2018, 176, 673–680. [Google Scholar] [CrossRef]
- Kim, N. Dynamic stiffness matrix of composite box beams. Steel Compos. Struct. 2009, 9, 473–497. [Google Scholar] [CrossRef]
- Erdogan, Y.S.; Catbas, F.N.; Bakir, P.G. Structural identification (St-Id) using finite element models for optimum sensor configuration and uncertainty quantification. Finite Elem. Anal. Des. 2014, 81, 1–13. [Google Scholar] [CrossRef]
- Chatzieleftheriou, S.; Lagaros, N.D. A trajectory method for vibration based damage identification of underdetermined problems. Struct. Control. Health Monit. 2017, 24, e1883. [Google Scholar] [CrossRef]
- Mai, H.T.; Truong, T.T.; Kang, J.; Mai, D.D.; Lee, J. A robust physics-informed neural network approach for predicting structural instability. Finite Elem. Anal. Des. 2023, 216, 103893. [Google Scholar] [CrossRef]
- He, Y.; Zhao, Z.-L.; Cai, K.; Kirby, J.; Xiong, Y.; Xie, Y.M. A thinning algorithm based approach to controlling structural complexity in topology optimization. Finite Elem. Anal. Des. 2022, 207, 103779. [Google Scholar] [CrossRef]
- Catbas, N.; Kijewski-Correa, T.; Aktan, E. Structural Identification of Constructed Systems: Approaches, Methods, and Technologies for Effective Practice of St-Id; American Society of Civil Engineers: Reston, VA, USA, 2013. [Google Scholar] [CrossRef]
- Dincal, S.; Stubbs, N. Nondestructive damage detection in euler-bernoulli beams using nodal curvatures—Part I: Theory and numerical verification. Struct. Control Health Monit. 2014, 21, 303–316. [Google Scholar] [CrossRef]
- Wei, G.; Lardeur, P.; Druesne, F. A new solid-beam approach based on first or higher-order beam theories for finite element analysis of thin to thick structures. Finite Elem. Anal. Des. 2022, 200, 103655. [Google Scholar] [CrossRef]
- Nguyen, N.-T.; Kim, N.-I.; Lee, J. Mixed finite element analysis of nonlocal Euler–Bernoulli nanobeams. Finite Elem. Anal. Des. 2015, 106, 65–72. [Google Scholar] [CrossRef]
- Leblouda, M.; Junaid, M.T.; Barakat, S.; Maalej, M. Shear buckling and stress distribution in trapezoidal web corrugated steel beams. Thin-Walled Struct. 2017, 113, 13–26. [Google Scholar] [CrossRef]
- Emadi, S.; Lozano-Galant, J.A.; Turmo, J. Analyzing the Effects of Shear Deformations on the Constrained Observability Method, Bridge Maintenance, Safety, Management, Life-Cycle Sustainability and Innovations; CRC Press: Boca Raton, FL, USA, 2021; pp. 3755–3762. [Google Scholar]
- Lozano-Galant, J.A.; Nogal, M.; Castillo, E.; Turmo, J. Application of observability techniques to structural system identification. Comput.-Aided Civ. Infrastruct. Eng. 2013, 28, 434–450. [Google Scholar] [CrossRef]
- Lei, J.; Nogal, M.; Lozano-Galant, J.A.; Xu, D.; Turmo, J. Constrained observability method in static structural system identification. Struct. Control Health Monit. 2017, 25, e2040. [Google Scholar] [CrossRef]
- Emadi, S.; Lozano-Galant, J.A.; Xia, Y.; Ramos, G.; Turmo, J. Structural system identification including shear deformation of composite bridges from vertical deflections. Steel Compos. Struct. 2019, 32, 731–741. [Google Scholar]
- Emadi, S. Application of Observability Techniques to Structural System Identification Including Shear Effects. Ph.D. Thesis, Universitat Politècnica de Catalunya-BarcelonaTech, Barcelona, Spain, 2020. [Google Scholar]
- MATLAB and Optimization Toolbox Release; The MathWorks, Inc.: Natick, MA, USA, 2017.
- Chen, Y.S.; Yen, B.T. Analysis of Composite Box Girders, March 1980; Fritz Laboratory Reports; Fritz Laboratory: Bethlehem, PA, USA, 1980; Paper 447; Available online: http://preserve.lehigh.edu/engr-civil-environmental-fritz-lab-reports/447 (accessed on 20 July 2023).
- Dong, X.; Zhao, L.; Xu, Z.; Du, S.; Wang, S.; Wang, X.; Jin, W. Construction of the Yunbao Bridge over the yellow river. In Proceedings of the EASEC-15, Xi’an, China, 11–13 October 2017. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Value |
|---|---|
| axial stiffness [GPa·m2] | 440.65 |
| shear stiffness for node 1 [GPa·m2] | 344.05 |
| shear stiffness for node 2 [GPa·m2] | 385 |
| flexural stiffness for node 1 [GPa·m4] | 1246.7 |
| flexural stiffness for node 2 [GPa·m4] | 1120 |
| Parameter | Average | CoV | Standard Deviation |
|---|---|---|---|
| EI1 | 1.000 | 8.791 × 10−7 | 8.791 × 10−7 |
| EI2 | 1.000 | 9.114 × 10−7 | 9.114 × 10−7 |
| GAv1 | 1.000 | 0.000 | 0.000 |
| GAv2 | 0.910 | 0.128 | 0.116 |
| Parameter | Average | CoV | Standard Deviation |
|---|---|---|---|
| EI1 | 1.000 | 8.783 × 10−7 | 8.783 × 10−7 |
| EI2 | 1.000 | 9.118 × 10−7 | 9.117 × 10−7 |
| GAv1 | 1.000 | 0.000 | 0.000 |
| GAv2 | 1.000 | 0.000 | 0.000 |
| Parameters | Elements 1 and 7 | Elements 2 and 6 | Elements 3 and 5 | Element 4 |
|---|---|---|---|---|
| area [m2] | 12.385 | 12.520 | 12.670 | 12.75 |
| shear area [m2] | 8.17 | 9.29 | 10.62 | 11.37 |
| inertia [m4] | 38.346 | 48.347 | 67.98 | 60.921 |
| Parameter. | Average | CoV | Standard Deviation |
|---|---|---|---|
| EI1 | 1.000 | 8.237 × 10−7 | 8.237 × 10−7 |
| EI7 | 1.000 | 8.903 × 10−7 | 8.903 × 10−7 |
| GAv1 | 0.617 | 0.740 | 0.456 |
| GAv7 | 0.256 | 0.305 | 0.078 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Emadi, S.; Sun, Y.; Lozano-Galant, J.A.; Turmo, J. Observing Material Properties in Composite Structures from Actual Rotations. Appl. Sci. 2023, 13, 11456. https://doi.org/10.3390/app132011456
Emadi S, Sun Y, Lozano-Galant JA, Turmo J. Observing Material Properties in Composite Structures from Actual Rotations. Applied Sciences. 2023; 13(20):11456. https://doi.org/10.3390/app132011456
Chicago/Turabian StyleEmadi, Seyyedbehrad, Yuan Sun, Jose A. Lozano-Galant, and Jose Turmo. 2023. "Observing Material Properties in Composite Structures from Actual Rotations" Applied Sciences 13, no. 20: 11456. https://doi.org/10.3390/app132011456
APA StyleEmadi, S., Sun, Y., Lozano-Galant, J. A., & Turmo, J. (2023). Observing Material Properties in Composite Structures from Actual Rotations. Applied Sciences, 13(20), 11456. https://doi.org/10.3390/app132011456