
Exploring User Experience in Sustainable Transport with Explainable AI Methods Applied to E-Bikes


Abstract
:1. Introduction
2. Fundamentals and Related Work
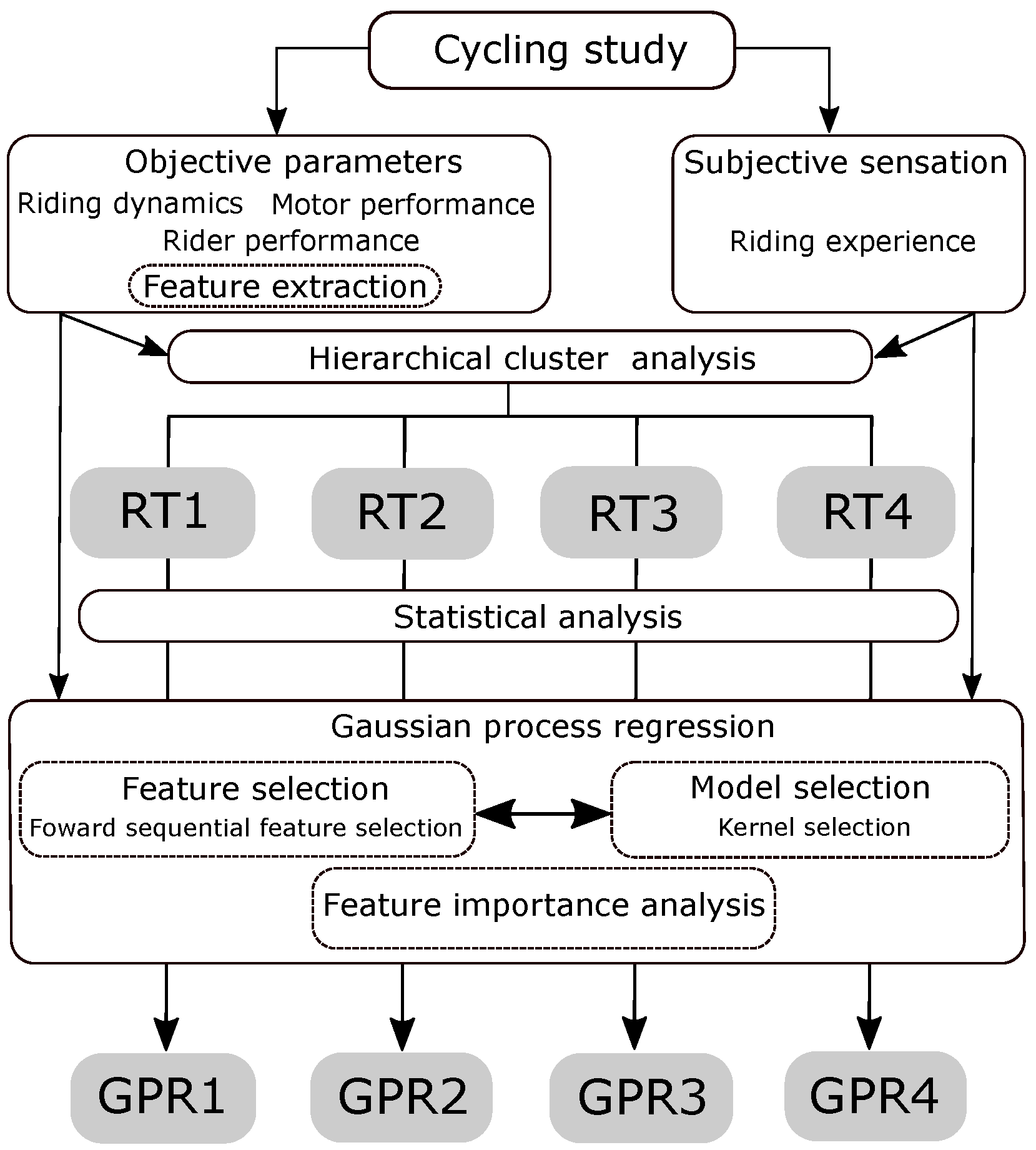
3. Methods
3.1. Cycling Study
3.1.1. Participants
3.1.2. Materials and Instruments
3.1.3. Procedure
3.2. Hierarchical Cluster Analysis
3.3. Statistical Analysis
3.4. Gaussian Process Regression
3.4.1. Gaussian Processes
3.4.2. Model Performance
3.4.3. Feature Selection
3.4.4. Model Selection
3.4.5. Feature Importance
4. Results
4.1. Hierarchical Cluster Analysis
4.2. Statistical Analysis
4.2.1. Rider and Rider Behaviour Characteristics
4.2.2. Riding Experience
4.3. Gaussian Process Regression
4.3.1. Feature Selection
4.3.2. Model Performance
4.4. Feature Importance Analysis
4.4.1. Rider Type RT1
4.4.2. Rider Type RT2
4.4.3. Rider Type RT3
4.4.4. Rider Type RT4
5. Discussion
5.1. Predictability
5.2. Impact of Predictors on Rider Types
5.3. Impact of Predictors in Related Research
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pastori, E.; Brambilla, M.; Maffii, S.; Vergnani, R.; Gualandi, E.; Skinner, I. Research for TRAN Committee—Modal Shift in European Transport: A Way Forward; European Parliament, Policy Department for Structural and Cohesion Policies: Brussels, Belgium, 2018. [Google Scholar] [CrossRef]
- Bier, L.; Joisten, P.; Abendroth, B. Warum nutzt der Mensch bevorzugt das Auto als Verkehrsmittel? Eine Analyse zum erlebten Fahrspaß unterschiedlicher Verkehrsmittelnutzer. Z. Arbeitswissenschaft 2019, 73, 58–68. [Google Scholar] [CrossRef]
- Adams, S.A. The Effect of Social Desirability and Social Approval on Self-Reports of Physical Activity. Am. J. Epidemiol. 2005, 161, 389–398. [Google Scholar] [CrossRef]
- Scherer, K.R. The dynamic architecture of emotion: Evidence for the component process model. Cogn. Emot. 2009, 23, 1307–1351. [Google Scholar] [CrossRef]
- Lim, T.; Kalra, A.; Thompson, J.; Odgers, J.C.; Beck, B. Physiological measures of bicyclists’ subjective experiences: A scoping review. Transp. Res. Part Traffic Psychol. Behav. 2022, 90, 365–381. [Google Scholar] [CrossRef]
- Tullis, T.; Albert, B. Measuring the User Experience; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Kudritzki, D. Möglichkeiten der Objektiverung subjektiver Beurteilungen des Fahrzeugverhaltens. In Subjektive Fahreindrücke Sichtbar Machen: Korrelation Zwischen CAE-Berechnung, Versuch und Messung von Versuchsfahrzeugen und -Komponenten; Becker, K., Ed.; OCLC: Renningen, Germany, 2000; p. 634088809. [Google Scholar]
- Field, A.P.; Miles, J.; Field, Z. Discovering Statistics Using R; Sage OCLC: London, UK; Thousand Oaks, CA, USA, 2012. [Google Scholar]
- Ray, S. A Quick Review of Machine Learning Algorithms. In Proceedings of the 2019 IEEE International Conference on Machine Learning, Big Data, Cloud and Parallel Computing (COMITCon), Faridabad, India, 14–16 February 2019; pp. 35–39. [Google Scholar]
- Tamim Kashifi, M.; Jamal, A.; Kashefi, M.S.; Almoshaogeh, M.; Rahman, S.M. Predicting the travel mode choice with interpretable machine learning techniques: A comparative study. Travel Behav. Soc. 2022, 29, 279–296. [Google Scholar] [CrossRef]
- Adadi, A.; Berrada, M. Peeking Inside the Black-Box: A Survey on Explainable Artificial Intelligence (XAI). IEEE Access 2018, 6, 52138–52160. [Google Scholar] [CrossRef]
- Dosilovic, F.K.; Brcic, M.; Hlupic, N. Explainable Artificial Intelligence: A Survey. In Proceedings of the 2018 IEEE 41st International Convention on Information and Communication Technology, Electronics and Microelectronics (MIPRO), Opatija, Croatia, 21–25 May 2018; pp. 210–215. [Google Scholar]
- Dastageeri, H.; Rodrigues, P.; Silberer, J. Happy or scared—Detecting emotions of pedelec drivers in urban areas. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-4/W9, 27–33. [Google Scholar] [CrossRef]
- Joo, S.; Oh, C.; Jeong, E.; Lee, G. Categorizing bicycling environments using GPS-based public bicycle speed data. Transp. Res. Part Emerg. Technol. 2015, 56, 239–250. [Google Scholar] [CrossRef]
- Schoeggl, P.; Ramschak, E. Vehicle Driveability Assessment Using Neural Networks for Development, Calibration and Quality Tests; SAE International: Detroit, MI, USA, 2000. [Google Scholar]
- Liu, Z.; Lyu, C.; Huo, J.; Wang, S.; Chen, J. Gaussian Process Regression for Transportation System Estimation and Prediction Problems: The Deformation and a Hat Kernel. IEEE Trans. Intell. Transp. Syst. 2022, 23, 22331–22342. [Google Scholar] [CrossRef]
- Bas, J.; Zou, Z.; Cirillo, C. An interpretable machine learning approach to understanding the impacts of attitudinal and ridesourcing factors on electric vehicle adoption. Transp. Lett. 2023, 15, 30–41. [Google Scholar] [CrossRef]
- Khattak, A.; Almujibah, H.; Elamary, A.; Matara, C.M. Interpretable Dynamic Ensemble Selection Approach for the Prediction of Road Traffic Injury Severity: A Case Study of Pakistan’s National Highway N-5. Sustainability 2022, 14, 12340. [Google Scholar] [CrossRef]
- Onen, S.; Ggaliwango, M.; Mugabi, S.; Nabende, J. Interpretable Machine Learning for Intelligent Transportation in Bike-Sharing. In Proceedings of the 2023 IEEE 2nd International Conference on Smart Technologies and Systems for Next Generation Computing (ICSTSN), Villupuram, India, 21–22 April 2023; pp. 1–6. [Google Scholar]
- CONEBI. European Bicycle Industry and Market Profile. 2022. Available online: https://www.conebi.eu/bicycle-and-e-bike-sales-continue-to-grow-reaching-record-levels/ (accessed on 31 October 2022).
- Lundberg, S.M. SHAP—GitHub Repository. 2018. Available online: https://github.com/shap/shap (accessed on 27 July 2023).
- Rasmussen, C.E.; Williams, C.K.I. Gaussian processes for machine learning. In Adaptive Computation and Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Plazier, P.A.; Weitkamp, G.; Berg, A.E.v. “Cycling was never so easy!” An analysis of e-bike commuters’ motives, travel behaviour and experiences using GPS-tracking and interviews. J. Transp. Geogr. 2017, 65, 25–34. [Google Scholar] [CrossRef]
- Ling, Z.; Cherry, C.; MacArthur, J.; Weinert, J. Differences of Cycling Experiences and Perceptions between E-Bike and Bicycle Users in the United States. Sustainability 2017, 9, 1662. [Google Scholar] [CrossRef]
- Johnson, M.; Rose, G. Extending life on the bike: Electric bike use by older Australians. J. Transp. Health 2015, 2, 276–283. [Google Scholar] [CrossRef]
- MacArthur, J.; Dill, J.; Person, M. Electric Bikes in North America: Results of an Online Survey. Transp. Res. Rec. J. Transp. Res. Board 2014, 2468, 123–130. [Google Scholar] [CrossRef]
- Baptista, P.; Pina, A.; Duarte, G.; Rolim, C.; Pereira, G.; Silva, C.; Farias, T. From on-road trial evaluation of electric and conventional bicycles to comparison with other urban transport modes: Case study in the city of Lisbon, Portugal. Energy Convers. Manag. 2015, 92, 10–18. [Google Scholar] [CrossRef]
- Fishman, E.; Cherry, C. E-bikes in the Mainstream: Reviewing a Decade of Research. Transp. Rev. 2016, 36, 72–91. [Google Scholar] [CrossRef]
- Edge, S.; Dean, J.; Cuomo, M.; Keshav, S. Exploring e-bikes as a mode of sustainable transport: A temporal qualitative study of the perspectives of a sample of novice riders in a Canadian city: E-bikes as sustainable transport. Can. Geogr. Géographe Can. 2018, 62, 384–397. [Google Scholar] [CrossRef]
- Feizi, A.; Oh, J.S.; Kwigizile, V.; Joo, S. Cycling environment analysis by bicyclists’ skill levels using instrumented probe bicycle (IPB). Int. J. Sustain. Transp. 2020, 14, 722–732. [Google Scholar] [CrossRef]
- Hein, M.; Boyen, J.; Stenner, H.T.; Finkel, A.; Protte, G.; Kück, M.; Tegtbur, U. Everyday Pedelec Use and its Effect on Meeting Physical Activity Guidelines. Med. Sci. Sport. Exerc. 2017, 49, 43. [Google Scholar] [CrossRef]
- Langford, B.C.; Cherry, C.R.; Bassett, D.R.; Fitzhugh, E.C.; Dhakal, N. Comparing physical activity of pedal-assist electric bikes with walking and conventional bicycles. J. Transp. Health 2017, 6, 463–473. [Google Scholar] [CrossRef]
- Popovich, N.; Gordon, E.; Shao, Z.; Xing, Y.; Wang, Y.; Handy, S. Experiences of electric bicycle users in the Sacramento, California area. Travel Behav. Soc. 2014, 1, 37–44. [Google Scholar] [CrossRef]
- Xing, Y.; Volker, J.; Handy, S. Why do people like bicycling? Modeling affect toward bicycling. Transp. Res. Part Traffic Psychol. Behav. 2018, 56, 22–32. [Google Scholar] [CrossRef]
- Lim, T.; Thompson, J.; Tian, L.; Beck, B. A transactional model of stress and coping applied to cyclist subjective experiences. Transp. Res. Part Traffic Psychol. Behav. 2023, 96, 155–170. [Google Scholar] [CrossRef]
- Laqua, A.; Schnee, J.; Pletinckx, J.; Meywerk, M. Identification of factors influencing the riding experience on e-mountain bikes: An analysis of the rider-bicycle interaction. Transp. Res. Part Traffic Psychol. Behav. 2023, 98, 61–72. [Google Scholar] [CrossRef]
- Haustein, S.; Møller, M. E-bike safety: Individual-level factors and incident characteristics. J. Transp. Health 2016, 3, 386–394. [Google Scholar] [CrossRef]
- Jackson, S.A.; Marsh, H.W. Development and Validation of a Scale to Measure Optimal Experience: The Flow State Scale. J. Sport Exerc. Psychol. 1996, 18, 17–35. [Google Scholar] [CrossRef]
- Fitch, D.T.; Carlen, J.; Handy, S.L. What makes bicyclists comfortable? Insights from a visual preference survey of casual and prospective bicyclists. Transp. Res. Part Policy Pract. 2022, 155, 434–449. [Google Scholar] [CrossRef]
- Paige Willis, D.; Manaugh, K.; El-Geneidy, A. Uniquely satised: Exploring cyclist satisfaction. Transp. Res. Part F Traffic Psychol. Behav. 2013, 18, 136–147. [Google Scholar] [CrossRef]
- Leger, S.J.; Dean, J.L.; Edge, S.; Casello, J.M. “If I had a regular bicycle, I wouldn’t be out riding anymore”: Perspectives on the potential of e-bikes to support active living and independent mobility among older adults in Waterloo, Canada. Transp. Res. Part Policy Pract. 2019, 123, 240–254. [Google Scholar] [CrossRef]
- Joo, S.; Oh, C. A novel method to monitor bicycling environments. Transp. Res. Part Policy Pract. 2013, 54, 1–13. [Google Scholar] [CrossRef]
- Sperlich, B.; Zinner, C.; Hébert-Losier, K.; Born, D.; Holmberg, H.-C. Biomechanical, cardiorespiratory, metabolic and perceived responses to electrically assisted cycling. Eur. J. Appl. Physiol. 2012, 112, 4015–4025. [Google Scholar] [CrossRef] [PubMed]
- Kazemzadeh, K.; Camporeale, R.; D’Agostino, C.; Laureshyn, A.; Hiselius, L.W. Same questions, different answers? A hierarchical comparison of cyclists’ perceptions of comfort: In-traffic vs. online approach. Transp. Lett. 2021, 13, 531–539. [Google Scholar] [CrossRef]
- Oehl, M.; Brandenburg, S.; Huemer, A.K. Cyclists’ anger experiences in traffic: The Cycling Anger Scale. Transp. Res. Part Traffic Psychol. Behav. 2019, 62, 564–574. [Google Scholar] [CrossRef]
- Dozza, M.; Werneke, J. Introducing naturalistic cycling data: What factors influence bicyclists’ safety in the real world? Transp. Res. Part Traffic Psychol. Behav. 2014, 24, 83–91. [Google Scholar] [CrossRef]
- Doorley, R.; Pakrashi, V.; Byrne, E.; Comerford, S.; Ghosh, B.; Groeger, J.A. Analysis of heart rate variability amongst cyclists under perceived variations of risk exposure. Transp. Res. Part Traffic Psychol. Behav. 2015, 28, 40–54. [Google Scholar] [CrossRef]
- Beck, B.; Perkins, M.; Olivier, J.; Chong, D.; Johnson, M. Subjective experiences of bicyclists being passed by motor vehicles: The relationship to motor vehicle passing distance. Accid. Anal. Prev. 2021, 155, 106102. [Google Scholar] [CrossRef]
- Yamaguchi, R.; Siriaraya, P.; Yoshihisa, T.; Shimojo, S.; Kawai, Y. A Detection System for Comfortable Locations Based on Facial Expression Analysis While Riding Bicycles; ACM: New York, NY, USA, 2023; pp. 306–309. [Google Scholar]
- Requardt, A.F.; Ihme, K.; Wilbrink, M.; Wendemuth, A. Towards affect-aware vehicles for increasing safety and comfort: Recognising driver emotions from audio recordings in a realistic driving study. IET Intell. Transp. Syst. 2020, 14, 1265–1277. [Google Scholar] [CrossRef]
- Teixeira, I.P.; da Silva, A.N.R.; Schwanen, T.; Manzato, G.G.; Dörrzapf, L.; Zeile, P.; Dekoninck, L.; Botteldooren, D. Does cycling infrastructure reduce stress biomarkers in commuting cyclists? A comparison of five European cities. J. Transp. Geogr. 2020, 88, 102830. [Google Scholar] [CrossRef]
- Liang, X.; Zhang, T.; Xie, M.; Jia, X. Analyzing bicycle level of service using virtual reality and deep learning technologies. Transp. Res. Part Policy Pract. 2021, 153, 115–129. [Google Scholar] [CrossRef]
- Ferreira, J.J.; Monteiro, M.S. What Are People Doing About XAI User Experience? A Survey on AI Explainability Research and Practice. In Design, User Experience, and Usability. Design for Contemporary Interactive Environments; Marcus, A., Rosenzweig, E., Eds.; Springer International Publishing: Cham, Switzerland, 2020; Volume 12201, pp. 56–73. [Google Scholar]
- Ribeiro, M.T.; Singh, S.; Guestrin, C. Why Should I Trust You? Explaining the Predictions of Any Classifier; ACM: New York, NY, USA, 2016; pp. 1135–1144. [Google Scholar]
- Haque, A.K.M.; Bahalul, A.K.M.; Islam, N.; Mikalef, P. Explainable Artificial Intelligence (XAI) from a user perspective: A synthesis of prior literature and problematizing avenues for future research. Technol. Forecast. Soc. Change 2023, 186, 122120. [Google Scholar] [CrossRef]
- Van der Waa, J.; Schoonderwoerd, T.; van Diggelen, J.; Neerincx, M. Interpretable confidence measures for decision support systems. Int. J. Hum. Comput. Stud. 2020, 144, 102493. [Google Scholar] [CrossRef]
- Shapley, L.S. A Value for N-Person Games; RAND Corporation: Santa Monica, CA, USA, 1952. [Google Scholar]
- Lundberg, S.M.; Lee, S. A Unified Approach to Interpreting Model Predictions. In Proceedings of the 31st International Conference on Neural Information Processing Systems, NIPS’17, Long Beach, CA, USA, 4–9 December 2017; Curran Associates Inc.: Red Hook, NY, USA, 2017; pp. 4768–4777. [Google Scholar]
- The MathWorks Inc. MATLAB Version: 9.13.0 (R2022b); The MathWorks Inc.: Natick, MA, USA, 2022; Available online: https://www.mathworks.com (accessed on 10 June 2023).
- OpenStreetMap Contributors. Map from OpenStreetMap, License CC-BY-SA 2.0 (Map) and ODbL (Data). 2023. Available online: https://www.openstreetmap.de/karte/ (accessed on 10 June 2023).
- Engeln, A.; Engelbrecht, A.; Kieninger, C. Joy and convenience of driving. In Proceedings of the 4th International Congress of Traffic and Transport Psychology (ICTTP), Washington, DC, USA, 31 August–4 September 2008. [Google Scholar]
- Engelbrecht, A. Fahrkomfort und Fahrspass bei Einsatz von Fahrerassistenzsystemen; Disserta Verlag: Berlin, Germany, 2013. [Google Scholar]
- Kalra, A.; Lim, T.; Pearson, L.; Beck, B. Methods used to capture subjective user experiences in adults while riding bicycles: A scoping review. Transp. Rev. 2023, 43, 453–477. [Google Scholar] [CrossRef]
- Gabriel, D.; Baumgärtner, D.; Görges, D. Accurate and robust state estimation for bicycles. Veh. Syst. Dyn. 2022, 61, 2338–2351. [Google Scholar] [CrossRef]
- Murtagh, F.; Contreras, P. Algorithms for hierarchical clustering: An overview. Wires Data Min. Knowl. Discov. 2012, 2, 86–97. [Google Scholar] [CrossRef]
- Bishop, C.M. Pattern Recognition and Machine Learning; Information Science and Statistics; Springer: New York, NY, USA, 2006. [Google Scholar]
- Chandrashekar, G.; Sahin, F. A survey on feature selection methods. Comput. Electr. Eng. 2014, 40, 16–28. [Google Scholar] [CrossRef]
- Schulz, E.; Speekenbrink, M.; Krause, A. A tutorial on Gaussian process regression: Modelling, exploring, and exploiting functions. J. Math. Psychol. 2018, 85, 1–16. [Google Scholar] [CrossRef]
- Cohen, J. Statistical Power Analysis for the Behavioral Sciences, 2nd ed.; L. Erlbaum Associates: Hillsdale, NJ, USA, 1988. [Google Scholar]
- Ozili, P.K. The Acceptable R-Square in Empirical Modelling for Social Science Research. SSRN Electron. J. 2022. [Google Scholar] [CrossRef]
- Agrícola, P.M.D.; da Silva Machado, D.G.; de Farias Junior, L.F.; do Nascimento Neto, L.I.; Fonteles, A.I.; da Silva, S.K.; Chao, C.H.; Fontes, E.B.; Elsangedy, H.M.; Okano, A.H. Slow Down and Enjoy: The Effects of Cycling Cadence on Pleasure. Percept. Mot. Ski. 2017, 124, 233–247. [Google Scholar] [CrossRef]
- Roberts, L.; Jones, G.; Brooks, R. Why Do You Ride?: A Characterization of Mountain Bikers, Their Engagement Methods, and Perceived Links to Mental Health and Well-Being. Front. Psychol. 2018, 9. [Google Scholar] [CrossRef]
- Dill, J.; McNeil, N. Four Types of Cyclists?: Examination of Typology for Better Understanding of Bicycling Behavior and Potential. Transp. Res. Rec. J. Transp. Res. Board 2013, 2387, 129–138. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Section | Terrain | Path Type | Underground | Slope [%] | Length [m] |
|---|---|---|---|---|---|
| 1 | downhill | forest path | gravel | −4 | 1200 |
| 2 | steep uphill | limited traffic zone | asphalt | +8 | 1100 |
| 3 | moderate uphill | forest path | gravel | +5 | 1100 |
| 4 | hilly | limited traffic zone | asphalt | +/−1/2 | 1600 |
| Semantic Differential | |||
|---|---|---|---|
| Category | Item | Negative Polar | Positive Polar |
| Activation | |||
| A1 | Activation | boring | exciting |
| Comfort | |||
| C1 | Comfort | uncomfortable | comfortable |
| Rider Type | ||||
|---|---|---|---|---|
| RT1 | RT2 | RT3 | RT4 | |
| N | 15 (30%) | 10.00 (20%) | 15 (30%) | 10 (20%) |
| Females nf | 7 (47%) | 0 (0%) | 4 (27%) | 2 (20%) |
| Age mean (SD) | 33.6 (13.1) | 34.7 (13.1) | 38.9 (11.8) | 39.3 (14.6) |
| Riding style | ||||
| Comfortable | 0 (0%) | 0 (0%) | 0 (0%) | 0 (0%) |
| Rather comfortable | 1 (7%) | 1 (10%) | 2 (13%) | 1 (10%) |
| Rather sportive | 12 (80%) | 5 (50%) | 11 (73%) | 4 (40%) |
| Sportive | 2 (13%) | 4 (40%) | 2 (13%) | 5 (50%) |
| Objective parameters | ||||
| Rider cadence mean (SD) [rpm] | 72.49 (8.09) | 77.78 (15.03) | 74.18 (8.21) | 79.18 (8.35) |
| Rider torque mean (SD) [Nm] | 15.62 (3.56) | 20.94 (4.01) | 18.72 (3.78) | 19.28 (4.18) |
| Heart rate mean (SD) [bpm] | 135.69 (19.60) | 143.77 (19.06) | 138.90 (16.04) | 134.83 (16.26) |
| Speed mean (SD) [km/h] | 20.98 (2.56) | 23.56 (3.61) | 22.22 (1.80) | 22.82 (2.08) |
| Acceleration mean (SD) [m/s2] | 0.31 (0.05) | 0.35 (0.04) | 0.32 (0.04) | 0.34 (0.03) |
| Riding Dynamics | |||
|---|---|---|---|
| Motor Performance | Rider Behaviour | Longitudinal Dynamics | Lateral Dynamics |
| Motor power mean | Torque mean | Speed mean | Roll angle deviation |
| Motor power deviation | Cadence mean | Acceleration mean | Yaw rate deviation |
| Heart rate mean | Deceleration max | ||
| Braking duration | |||
| Pitch angle max | |||
| Overall GPR Model | Uphill GPR Model | |||||||
|---|---|---|---|---|---|---|---|---|
| RT1 | RT2 | RT3 | RT4 | RT1 | RT2 | RT3 | RT4 | |
| Cross-val. RMSE | 0.61 | 0.76 | 0.60 | 0.82 | 0.53 | 0.62 | 0.53 | 0.50 |
| RMSE SD | 0.04 | 0.11 | 0.11 | 0.10 | 0.07 | 0.19 | 0.11 | 0.13 |
| R-squared | 0.60 | 0.37 | 0.61 | 0.27 | 0.70 | 0.27 | 0.80 | 0.64 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Laqua, A.; Schnee, J.; Pletinckx, J.; Meywerk, M. Exploring User Experience in Sustainable Transport with Explainable AI Methods Applied to E-Bikes. Appl. Sci. 2023, 13, 11277. https://doi.org/10.3390/app132011277
Laqua A, Schnee J, Pletinckx J, Meywerk M. Exploring User Experience in Sustainable Transport with Explainable AI Methods Applied to E-Bikes. Applied Sciences. 2023; 13(20):11277. https://doi.org/10.3390/app132011277
Chicago/Turabian StyleLaqua, Annika, Jan Schnee, Jo Pletinckx, and Martin Meywerk. 2023. "Exploring User Experience in Sustainable Transport with Explainable AI Methods Applied to E-Bikes" Applied Sciences 13, no. 20: 11277. https://doi.org/10.3390/app132011277
APA StyleLaqua, A., Schnee, J., Pletinckx, J., & Meywerk, M. (2023). Exploring User Experience in Sustainable Transport with Explainable AI Methods Applied to E-Bikes. Applied Sciences, 13(20), 11277. https://doi.org/10.3390/app132011277