
Interference Estimation Using a Recurrent Neural Network Equalizer for Holographic Data Storage Systems


Abstract
:1. Introduction
- -
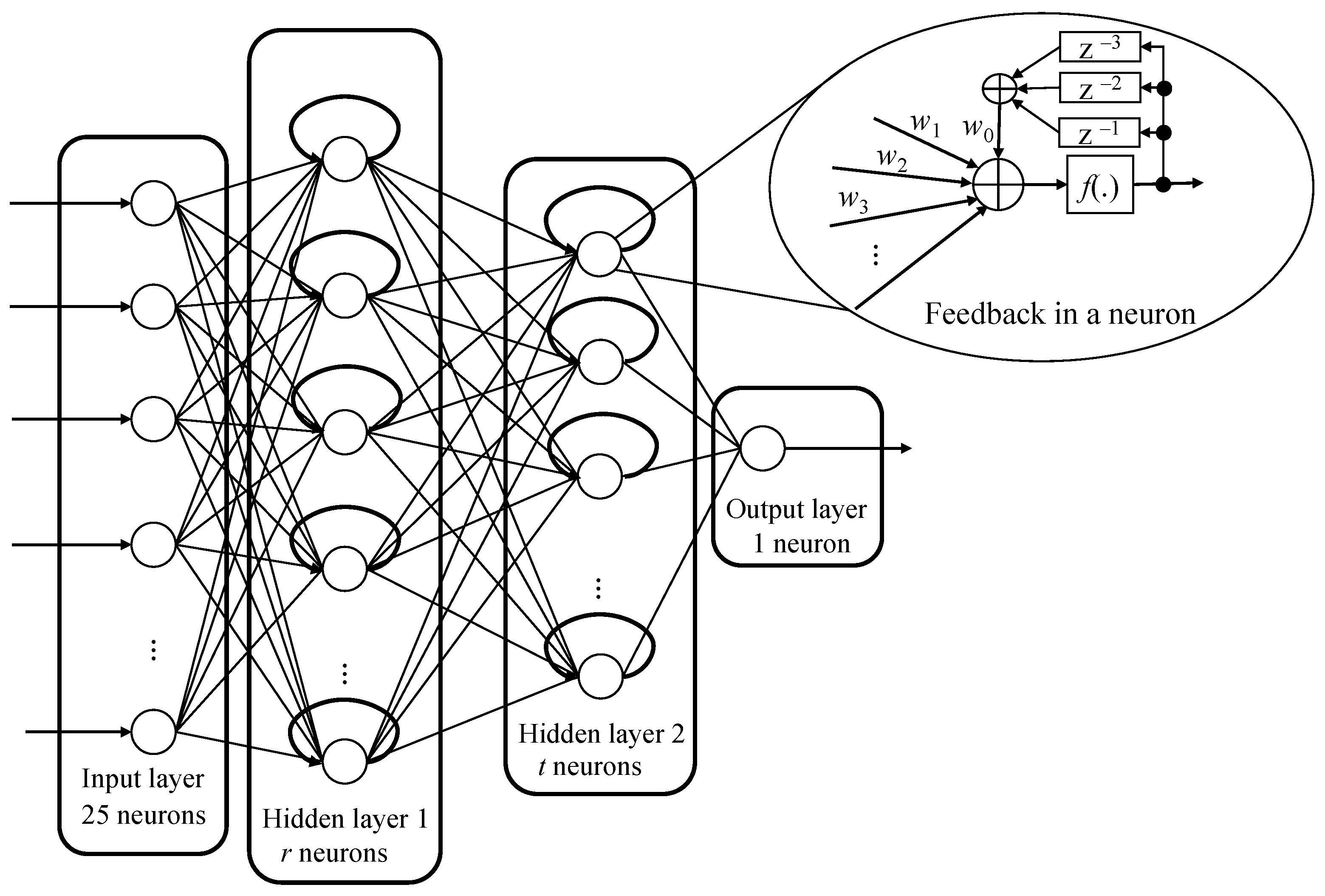
- A RNN was applied to HDS systems.
- -
- The RNN was designed to achieve the optimized structure of ISI or ITI estimators.
- -
- Analysis of the RNN equalizer to estimate ISI and ITI is presented.
- -
- Finally, the simulation results were obtained to verify the performance of the proposed model.
2. Background
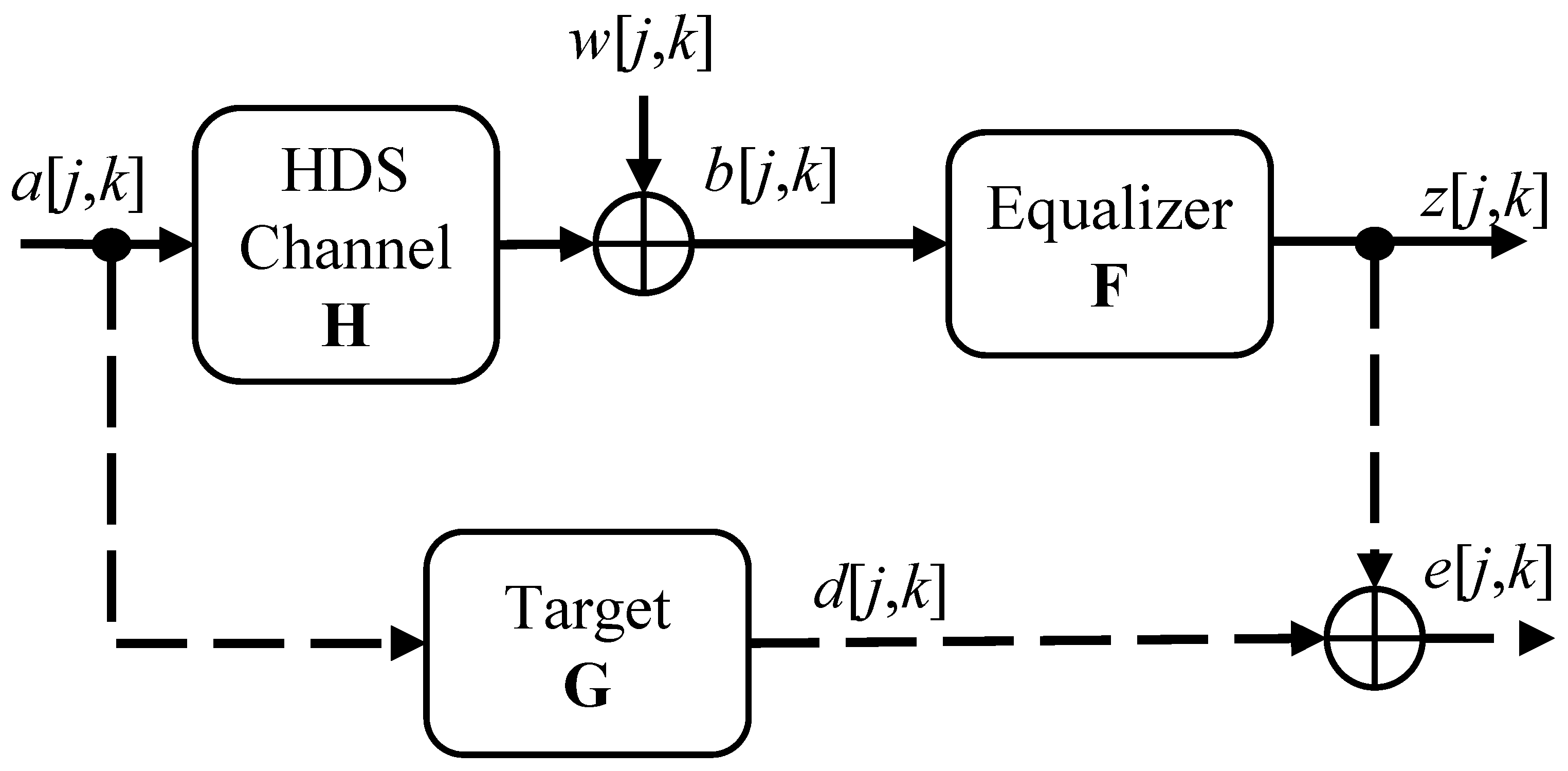
2.1. Equalizer and Generalized Partial Response Target
2.2. ISI and ITI Estimator
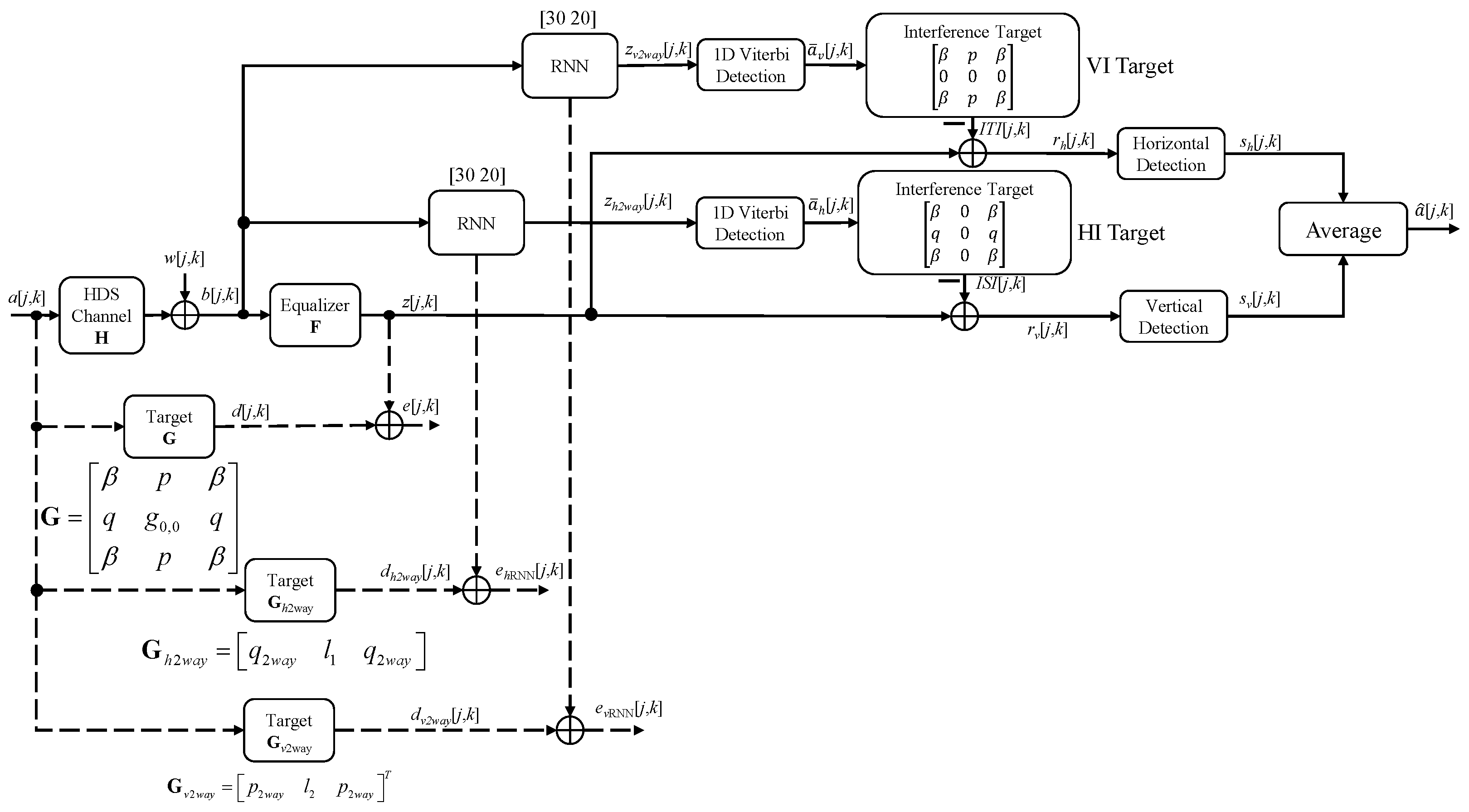
3. Proposed Model
- -
- Removing ULI[j,k]:
- -
- Removing LRI[j,k]:
4. Simulation
4.1. HDS Channel Model
4.2. Simulation Results
- -
- Conditions of Gh2way:
- -
- Conditions of Gv2way:
- -
- The loss function for the first RNN:
- -
- The loss function for the second RNN:where M is the number of rows and N is the number of columns of the data page b[j,k]. In our simulation, M = N = 1200.
4.3. Complexity
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hesselink, L.; Orlov, S.S.; Bashaw, M.C. Holographic data storage systems. Proc. IEEE 2004, 92, 1231–1280. [Google Scholar] [CrossRef]
- Koo, K.; Kim, S.V.; Jeong, J.J.; Kim, S.W. Two-dimensional soft output viterbi algorithm with a variable reliability factor for holographic data storage. Jpn. J. Appl. Phys. 2013, 52, 09LE03. [Google Scholar] [CrossRef]
- Bernal, M.-P.; Burr, G.W.; Coufal, H.; Quintanilla, M. Balancing interpixel cross talk and detector noise to optimize areal density in holographic storage systems. Appl. Opt. 1998, 37, 5377–5385. [Google Scholar] [CrossRef] [PubMed]
- Wang, Z.; Jin, G.; He, Q.; Wu, M. Simultaneous defocusing of the aperture and medium on a spectroholographic storage system. Appl. Opt. 2007, 46, 5770–5778. [Google Scholar] [CrossRef] [PubMed]
- Shelby, R.M.; Hoffnagle, J.A.; Burr, G.W.; Jefferson, C.M.; Bernal, M.-P.; Coufal, H.; Grygier, R.K.; Günther, H.; Macfarlane, R.M.; Sincerbox, G.T. Pixel-matched holographic data storage with megabit pages. Opt. Lett. 1997, 22, 1509–1511. [Google Scholar] [CrossRef] [PubMed]
- Burr, G.W.; Mok, F.H.; Psaltis, D. Angle and space multiplexed holographic storage using the 90° geometry. Opt. Commun. 1995, 117, 49–55. [Google Scholar] [CrossRef]
- Yu, F.T.; Wu, S.; Mayers, A.W.; Rajan, S. Wavelength multiplexed reflection matched spatial filters using LiNbO3. Opt. Commun. 1991, 81, 343–347. [Google Scholar] [CrossRef]
- Rakuljic, G.A.; Leyva, V.; Yariv, A.; Yeh, P.; Gu, C. Optical data storage by using orthogonal wavelength-multiplexed volume holograms. Opt. Lett. 1992, 17, 1473. [Google Scholar] [CrossRef]
- Krile, T.F.; Hagler, M.O.; Redus, W.D.; Walkup, J.F. Multiplex holography with chirp-modulated binary phase-coded reference-beam masks. Appl. Opt. 1979, 18, 52–56. [Google Scholar] [CrossRef]
- Ford, J.E.; Fainman, Y.; Lee, S.H. Array interconnection by phase-coded optical correlation. Opt. Lett. 1990, 15, 1088–1090. [Google Scholar] [CrossRef]
- Cideciyan, R.; Dolivo, F.; Hermann, R.; Hirt, W.; Schott, W. A PRML system for digital magnetic recording. IEEE J. Sel. Areas Commun. 1992, 10, 38–56. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Two-Dimensional SOVA and LDPC Codes for Holographic Data Storage System. IEEE Trans. Magn. 2009, 45, 2260–2263. [Google Scholar] [CrossRef]
- Nguyen, C.; Lee, J. Iterative detection supported by extrinsic information for holographic data storage systems. Electron. Lett. 2015, 51, 1857–1859. [Google Scholar] [CrossRef]
- Nguyen, C.; Lee, J. Iterative readback-aided detection for holographic data storage systems. Electron. Lett. 2016, 52, 1436–1438. [Google Scholar] [CrossRef]
- Nabavi, S.; Kumar, B.V.K.V. Two-dimensional generalized partial response equalizer for bit-patterned media. In Proceedings of the IEEE International Conference on Communications, Glasgow, UK, 24–28 June 2007; pp. 6249–6254. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Lee, J. Simplified Two-Dimensional Generalized Partial Response Target of Holographic Data Storage Channel. Appl. Sci. 2022, 12, 4070. [Google Scholar] [CrossRef]
- Nguyen, T.A.; Lee, J. Two-dimensional interference estimator with parallel structure for holographic data storage channel. Appl. Sci. 2022, 12, 2112. [Google Scholar] [CrossRef]
- Nguyen, C.D.; Lee, J. 8/10 two-dimensional modulation code for holographic data storage systems. Electron. Lett. 2016, 52, 710–712. [Google Scholar] [CrossRef]
- Hoang, H.A.; Yoo, M. 3ONet: 3-D Detector for Occluded Object under Obstructed Conditions. IEEE Sens. J. 2023, 23, 18879–18892. [Google Scholar] [CrossRef]
- Shaoshuai, S.; Zhe, W.; Jianping, S.; Xiaogang, W.; Hongsheng, L. From points to parts: 3d object detection from point cloud with part-aware and part-aggregation network. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 2647–2664. [Google Scholar]
- Duong, M.-T.; Hong, M.-C. EBSD-Net: Enhancing Brightness and Suppressing Degradation for Low-light Color Image using Deep Networks. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), Yeosu, Republic of Korea, 26–28 October 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Wang, W.; Wu, X.; Yuan, X.; Gao, Z. An Experiment-Based Review of Low-Light Image Enhancement Methods. IEEE Access 2020, 8, 87884–87917. [Google Scholar] [CrossRef]
- Sayyafan, A.; Aboutaleb, A.; Belzer, B.J.; Sivakumar, K.; Aguilar, A.; Pinkham, C.A.; Chan, K.S.; James, A. Deep Neural Network Media Noise Predictor Turbo-Detection System for 1-D and 2-D High-Density Magnetic Recording. IEEE Trans. Magn. 2020, 57, 1–13. [Google Scholar] [CrossRef]
- Zhang, X.; Lue, T. A RNN decoder for channel decoding under correlated noise. In Proceedings of the 2019 IEEE/CIC International Conference on Communications Workshops in China (ICCC Workshops), Changchun, China, 11–13 August 2019; pp. 30–35. [Google Scholar]
- Khametong, A.; Rueangnetr, N.; Warisarn, C.; Koonkarnkhai, S.; Kovintavewat, P. Deep Neural Networks based Soft-Information Improvement for Two-head/Two-track Bit-Patterned Magnetic Recording. In Proceedings of the 2022 International Symposium on Intelligent Signal Processing and Communication Systems (ISPACS), Penang, Malaysia, 22–25 November 2022; pp. 1–4. [Google Scholar] [CrossRef]
- Nguyen, C.D.; Nguyen, P.D.; Nguyen, A.T.; Pham, N.X.; Nguyen, K.D. Performance Evaluation of Neural Network-Based Channel Detection For STT-MRAM. In Proceedings of the 8th NAFOSTED Conference on Information and Computer Science (NICS), Hanoi, Vietnam, 21–22 December 2021; pp. 430–434. [Google Scholar] [CrossRef]
- Kim, K.; Kim, S.H.; Koo, G.; Seo, M.S.; Kim, S.W. Decision feedback equalizer for holographic data storage. Appl. Opt. 2018, 57, 4056–4066. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [r t] | 14 dB | 15 dB |
|---|---|---|
| [10 20] | 0.00162 | 0.00093 |
| [20 20] | 0.00112 | 0.00043 |
| [30 20] | 0.0006 | 0.0002 |
| [40 40] | 0.003 | 0.0015 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.A.; Lee, J. Interference Estimation Using a Recurrent Neural Network Equalizer for Holographic Data Storage Systems. Appl. Sci. 2023, 13, 11125. https://doi.org/10.3390/app132011125
Nguyen TA, Lee J. Interference Estimation Using a Recurrent Neural Network Equalizer for Holographic Data Storage Systems. Applied Sciences. 2023; 13(20):11125. https://doi.org/10.3390/app132011125
Chicago/Turabian StyleNguyen, Thien An, and Jaejin Lee. 2023. "Interference Estimation Using a Recurrent Neural Network Equalizer for Holographic Data Storage Systems" Applied Sciences 13, no. 20: 11125. https://doi.org/10.3390/app132011125
APA StyleNguyen, T. A., & Lee, J. (2023). Interference Estimation Using a Recurrent Neural Network Equalizer for Holographic Data Storage Systems. Applied Sciences, 13(20), 11125. https://doi.org/10.3390/app132011125