

PTA-Sync: Packet-Train-Aided Time Synchronization for Underwater Acoustic Applications


Abstract
:1. Introduction
2. Synchronization Protocol for UANets
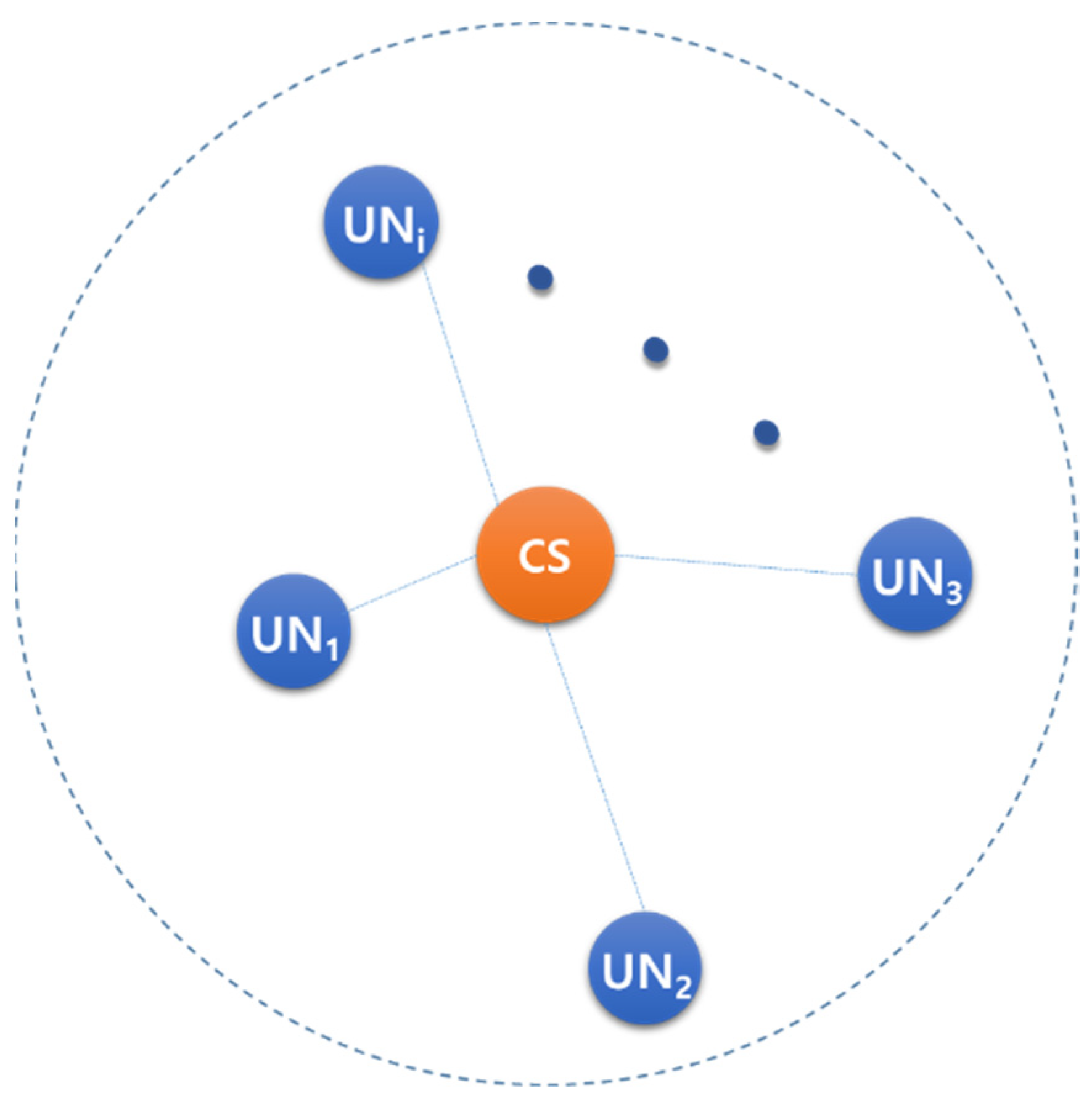
2.1. Underwater Acoustic Networks (UANets)
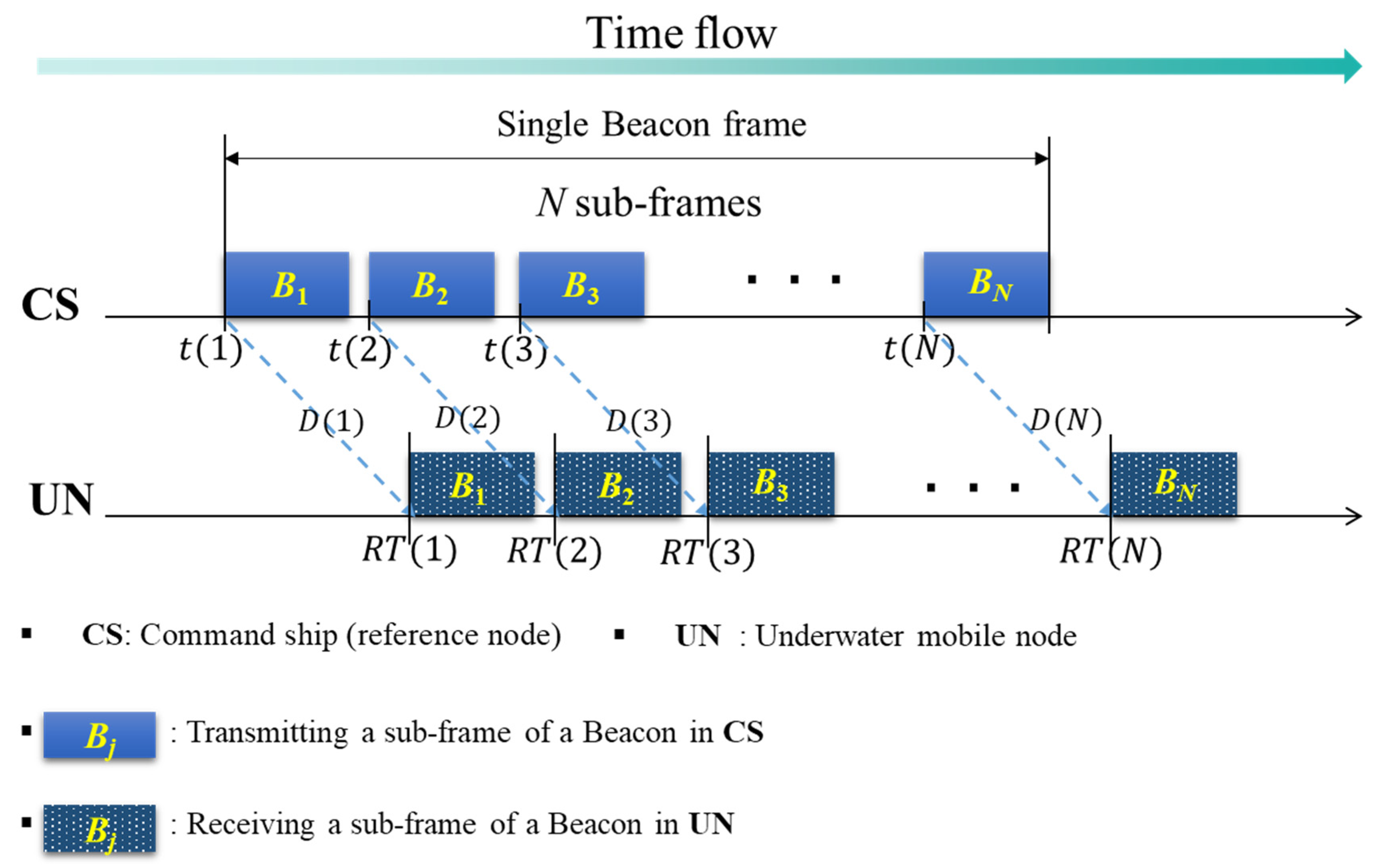
2.2. PTA-Sync Protocol
- Assumption and Overview of PTA-Sync
- UN contains the initial position information and initial propagation delay information.
- UN acquires the position and speed from sensors, which include an altitude heading reference system (AHRS) and a Doppler velocity log (DVL).
- Description of PTA-Sync
| Algorithm 1: PTA-Sync |
| 1: Get 2: Get and , 3: Get and t by parsing , 4: Set = 1, 5: while do 6: if > 1 7: 8: 9: 10: // c is the underwater acoustic speed 11: 12: 13: end if 14: 15: end while 16: 17: |
3. Simulation and Results
3.1. Simulation Setup
- The initial position of UN has a uniform distribution in [0, Nr], and the initial propagation delay of UN is known.
- UN maintains its velocity and direction during one sub-frame.
- UN’s propulsion velocity and direction are distorted by the underwater environment, and the distorted velocity and direction have Gaussian distributions, with a mean of 0 and a standard deviation of .
- The acoustic speed is constant at 1500 m/s.
- All frame data are transmitted successfully without loss or error.
- The data transmission rate is 100 bps, and the packet length is variable.
- The arbitrary mobility level in the Gauss–Markov model is 0.5.
- The simulation is repeated 20,000 times.
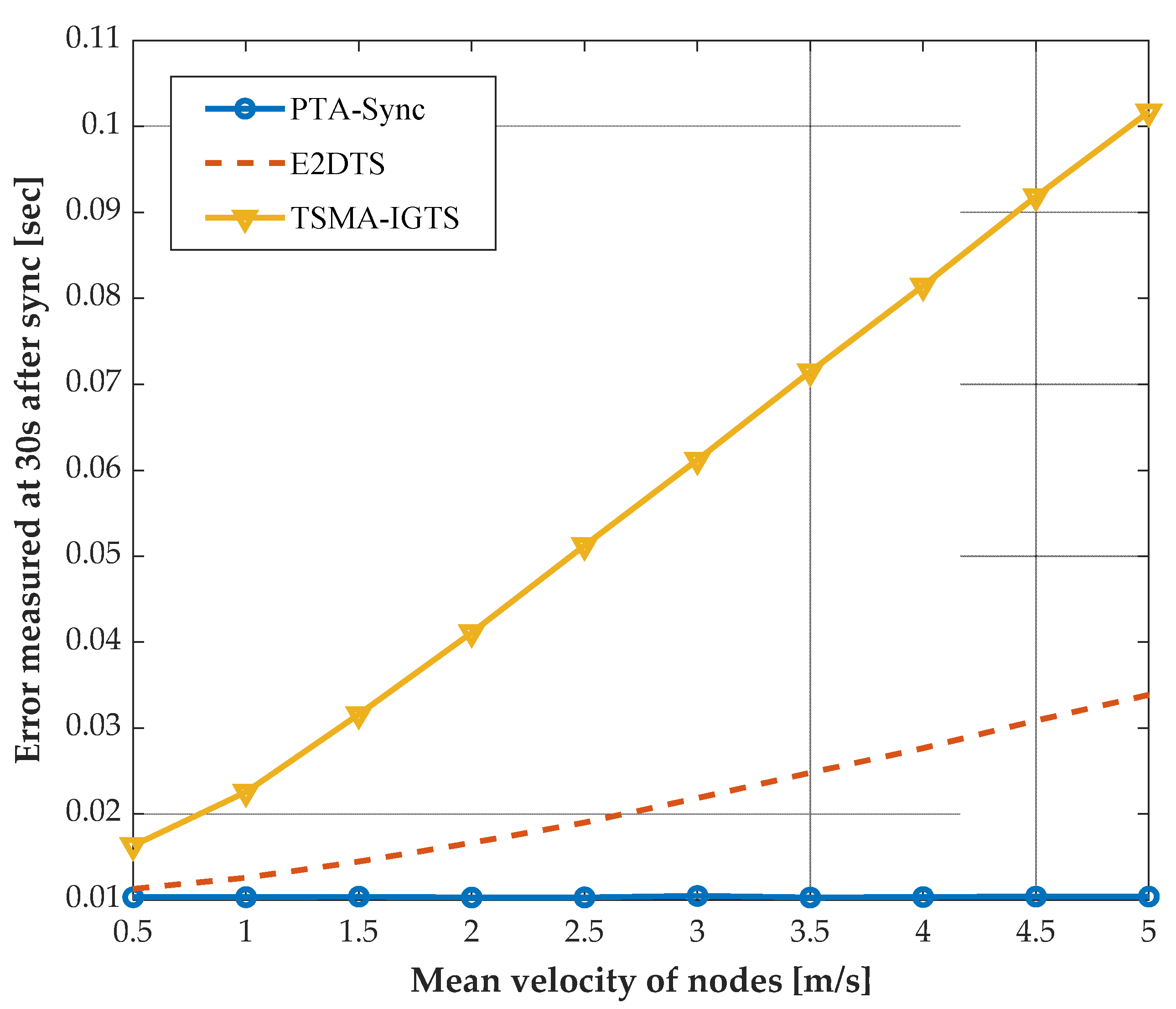
3.2. Simulation Results
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Crow, B.P.; Widjaja, I.; Kim, J.G.; Sakai, P.T. IEEE 802.11 Wireless Local Area Networks. IEEE Commun. Mag. 1997, 35, 116–126. [Google Scholar] [CrossRef]
- Sundararaman, B.; Buy, U.; Kshemkalyani, A.D. Clock synchronization for wireless sensor networks: A survey. Ad Hoc Networks 2005, 3, 281–323. [Google Scholar] [CrossRef]
- Rhee, I.-K.; Lee, J.; Kim, J.; Serpedin, E.; Wu, Y.-C. Clock Synchronization in Wireless Sensor Networks: An Overview. Sensors 2009, 9, 56–85. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ranganathan, P.; Nygard, K. Time Synchronization in Wireless Sensor Networks: A survey. Int. J. UbiComp. 2010, 1, 92–102. [Google Scholar] [CrossRef] [Green Version]
- Elson, J.; Girod, L.; Estrin, D. Fine-grained network time synchronization using reference broadcasts. ACM SIGOPS Oper. Syst. Rev. 2002, 36, 147–163. [Google Scholar] [CrossRef] [Green Version]
- Ganeriwal, S.; Kumar, R.; Srivastava, M. Timing sync protocol for sensor networks. In Proceedings of the SenSys’03: Proceedings of the 1st International Conference on Embedded Networked Sensor Systems, Los Angeles, CA, USA, 5–7 November 2003. [Google Scholar]
- Maróoti, M.; Kusy, B.; Simon, G.; Ledeczi, A. The flooding time synchronization protocol. In Proceedings of the SenSys’04: Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, Baltimore, MD, USA, 5 November 2004; pp. 39–49. [Google Scholar]
- Greunen, J.V.; Rabaey, J. Lightweight time synchronization for sensor networks. In Proceedings of the WSNA’03: Proceedings of the 2nd ACM International Conference on Wireless Sensor Networks and Applications, San Diego, CA, USA, 19 September 2003; pp. 11–19. [Google Scholar]
- Kopetz, H.; Ochsenreiter, W. Clock Synchronization in Distributed Real-Time Systems. IEEE Trans. Comput. 1987, C-36, 933–940. [Google Scholar] [CrossRef]
- Horauer, M.; Schossmaier, K.; Schmid, U.; Höller, R.; Kerö, N. PSynUTC-evaluation of a high-precision time synchronization prototype system for Ethernet LANs. In Proceedings of the 34th Annual Precise Time and Time Interval Systems and Applications Meeting, Reston, VA, USA, 3–5 December 2002; pp. 263–277. [Google Scholar]
- Leng, M.; Wu, Y.-C. On Clock Synchronization Algorithms for Wireless Sensor Networks Under Unknown Delay. IEEE Trans. Veh. Technol. 2009, 59, 182–190. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Wu, Y.-C. Joint Time Synchronization and Localization of an Unknown Node in Wireless Sensor Networks. IEEE Trans. Signal Process. 2009, 58, 1309–1320. [Google Scholar] [CrossRef] [Green Version]
- Heidemann, J.; Ye, W.; Wills, J.; Syed, A.; Li, Y. Research challenges and applications for underwater sensor networking. In Proceedings of the IEEE Wireless Communications and Networking Conference, 2006. WCNC 2006, Las Vegas, NV, USA, 3–6 April 2006; Volume 1, pp. 228–235. [Google Scholar] [CrossRef]
- Akyildiz, I.F.; Pompili, D.; Melodia, T. Underwater acoustic sensor networks: Research challenges. Ad Hoc Netw. 2005, 3, 257–279. [Google Scholar] [CrossRef]
- Climent, S.; Sanchez, A.; Capella, J.V.; Meratnia, N.; Serrano, J.J. Underwater Acoustic Wireless Sensor Networks: Advances and Future Trends in Physical, MAC and Routing Layers. Sensors 2014, 14, 795–833. [Google Scholar] [CrossRef]
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef] [Green Version]
- Syed, S.; Heidemann, J. Time synchronization for high latency acoustic networks. In Proceedings of the Proceedings IEEE INFOCOM 2006. 25th IEEE International Conference on Computer Communications, Barcelona, Spain, 23–29 April 2006. [Google Scholar]
- Chirdchoo, N.; Soh, W.S.; Chua, K.C. MU-Sync: A time synchronization protocol for underwater mobile networks. In Proceedings of the WUWNet’08: Proceedings of the 3rd International Workshop on Underwater Networks, San Francisco, CA, USA, 15 September 2008; pp. 35–42. [Google Scholar]
- Liu, J.; Zhou, Z.; Peng, Z.; Cui, J.-H.; Zuba, M.; Fiondella, L. Mobi-Sync: Efficient Time Synchronization for Mobile Underwater Sensor Networks. IEEE Trans. Parallel Distrib. Syst. 2012, 24, 406–416. [Google Scholar] [CrossRef]
- Lu, F.; Mirza, D.; Schurger, C. D-Sync: Doppler based time synchronization for mobile underwater sensor networks. In Proceedings of the WUWNet’10: Proceedings of the 5th International Workshop on Underwater Networks, Woods Hole, MA, USA, 30 September 2010. [Google Scholar]
- Liu, J.; Wang, Z.; Peng, Z.; Zuba, M.; Cui, J.-H.; Zhou, S. TSMU: A Time Synchronization Scheme for Mobile Underwater Sensor Networks. In Proceedings of the 2011 IEEE Global Telecommunications Conference—GLOBECOM 2011, Houston, TX, USA, 5–9 December 2011; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, J.; Wang, Z.; Zuba, M.; Peng, Z.; Cui, J.-H.; Zhou, S. DA-Sync: A Doppler-Assisted Time-Synchronization Scheme for Mobile Underwater Sensor Networks. IEEE Trans. Mob. Comput. 2013, 13, 582–595. [Google Scholar] [CrossRef]
- Zhou, F.; Wang, Q.; Nie, D.; Qiao, G. DE-Sync: A Doppler-Enhanced Time Synchronization for Mobile Underwater Sensor Networks. Sensors 2018, 18, 1710. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zhou, F.; Wang, Q.; Han, G.; Qiao, G.; Sun, Z.; Niaz, A. APE-Sync: An Adaptive Power Efficient Time Synchronization for Mobile Underwater Sensor Networks. IEEE Access 2019, 7, 52379–52389. [Google Scholar] [CrossRef]
- Wang, J.; Ma, J.; Feng, Y.; Feng, Q.; Gao, G.; Lv, Y. PCDE-Sync: A Time Synchronization Mechanism Based on Partial Clustering and the Doppler Effect for Underwater Acoustic Networks. Comput. Intell. Neurosci. 2022, 2022, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Liu, J.; Wang, Z.; Zuba, M.; Peng, Z.; Cui, J.H.; Zhou, S. JSL: Joint time synchronization and localization design with strati-fication compensation in mobile underwater sensor networks. In Proceedings of the 9th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON), Seoul, Korea, 18–21 June 2012; pp. 317–325. [Google Scholar]
- Mortazavi, E.; Javidan, R.; Dehghani, M.J.; Kavoosi, V. A robust method for underwater wireless sensor joint localization and synchronization. Ocean Eng. 2017, 137, 276–286. [Google Scholar] [CrossRef]
- Eustice, R.M.; Singh, H.; Whitcomb, L.L. Synchronous-clock, one-way-travel-time acoustic navigation for underwater vehi-cles. J. Field Robot. 2011, 28, 121–136. [Google Scholar] [CrossRef]
- Cario, G.; Casavola, A.; Djapic, V.; Gjanci, P.; Lupia, M.; Petrioli, C.; Spaccini, D. Clock synchronization and ranging estimation for control and cooperation of multiple UUVs. In Proceedings of the OCEANS 2016—Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–9. [Google Scholar] [CrossRef]
- Liu, D.; Zhu, M.; Li, D.; Fang, X.; Wu, Y. Energy-efficient time synchronization based on nonlinear clock skew tracking for underwater acoustic networks. Sensors 2021, 21, 5018. [Google Scholar] [CrossRef]
- Li, Z.; Guo, Z.; Hong, F.; Hong, L. E2DTS: An energy efficiency distributed time synchronization algorithm for underwater acoustic mobile sensor networks. Ad Hoc Networks 2013, 11, 1372–1380. [Google Scholar] [CrossRef]
- Jin, Z.; Ding, M.; Luo, Y.; Li, S. Integrated Time Synchronization and Multiple Access Protocol for Underwater Acoustic Sensor Networks. IEEE Access 2019, 7, 101844–101854. [Google Scholar] [CrossRef]
- Camp, T.; Boleng, J.; Davies, V. A survey of mobility models for ad hoc network research. Wirel. Commun. Mob. Comput. 2002, 2, 483–502. [Google Scholar] [CrossRef]
- Sendra, S.; Lloret, J.; Jimenez, J.M.; Parra, L. Underwater Acoustic Modems. IEEE Sens. J. 2015, 16, 4063–4071. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| N | Total number of sub-frame beacons |
| j-th sub-frame beacon | |
| t(j) | Time at which CS transmitted |
| Time at which UN received | |
| One-way travel time (OWTT) for transmitted by CS to be received by UN | |
| 3D position vector when CS transmits | |
| 3D position vector when UN receives | |
| 3D velocity vector when UN receives | |
| Changes in OWTT of UN when and are transmitted | |
| Estimated clock skew of UN when and sare transmitted | |
| Mean of | |
| Estimated clock offset of UN |
| Parameter | Value |
|---|---|
| Mean velocity of UN | [0.5, 5] m/s |
| Number of messages exchanged for synchronization | [1, 30] |
| Network range | [500, 30,000] m |
| Clock skew | Uniform distribution within the range of 20–50 ppm. |
| Degree of mobility randomness | [0, 1] in the Gauss–Markov model |
| Mean direction of UN | |
| Data transmission rate | 100 bps |
| Packet size | Varying in the range of [1, 750] bytes |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cho, A.-R.; Choi, Y. PTA-Sync: Packet-Train-Aided Time Synchronization for Underwater Acoustic Applications. Appl. Sci. 2023, 13, 978. https://doi.org/10.3390/app13020978
Cho A-R, Choi Y. PTA-Sync: Packet-Train-Aided Time Synchronization for Underwater Acoustic Applications. Applied Sciences. 2023; 13(2):978. https://doi.org/10.3390/app13020978
Chicago/Turabian StyleCho, A-Ra, and Youngchol Choi. 2023. "PTA-Sync: Packet-Train-Aided Time Synchronization for Underwater Acoustic Applications" Applied Sciences 13, no. 2: 978. https://doi.org/10.3390/app13020978
APA StyleCho, A.-R., & Choi, Y. (2023). PTA-Sync: Packet-Train-Aided Time Synchronization for Underwater Acoustic Applications. Applied Sciences, 13(2), 978. https://doi.org/10.3390/app13020978